|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Радиолокационная ориентировка
Под радиолокационной ориентировкой в судовождении понимают определение места судна на судоходном участке пути относительно берегов, оси и кромок судового хода с использованием судовой РЛС. На внутренних водных путях применяются как штурманский, так и глазомерный методы радиолокационной ориентировки. Штурманский метод, широко применяемый в морском судовождении, на внутренних водных путях применяется редко, лишь при плавании по водохранилищам и озерам, так как он требует ведения расчетов с помощью штурманских инструментов и навигационных карт, заставляет судоводителя отвлекаться от радиолокационного наблюдения и не позволяет быстро определить местоположение судна. Наиболее часто применяются определения места по двум расстояниям до ориентиров (Рис.1а) и по радиолокационному пеленгу до ориентира и дистанции до него (Рис.1б).
а) б)
Рис.1 Штурманские методы определения места судна
Место судна находится в точке А пересечения двух линий положения. Основной недостаток данных методов – отсутствие контроля за правильностью опознавания ориентиров. В основном радиолокационная ориентировка осуществляется глазомерным методом, то есть путем сопоставления радиолокационного изображения судоходного участка с ориентирами, нанесенными на навигационной карте (горные берега, гидротехнические сооружения, устья рек и заливов, мысы, яры и мосты, навигационные знаки и т.д.). С целью непрерывного контроля движения судна применяют типовые приемы радиолокационной ориентировки. Наиболее эффективно их использование на РЛС, работающей в режиме «По норду» или «Стабилизированный курс».
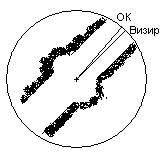
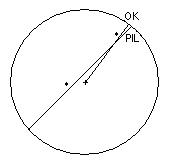
Ориентировка по носовому и кормовому ориентирам. В качестве ориентиров А и Б (Рис.2) могут быть выбраны русловые маяки, буи, мысы, знаки щелевых и линейных створов, то есть точечные ориентиры. Положение судна на линии пути определяется с помощью визира или параллельной индексной линии (PIL), которые нужно на экране РЛС развернуть так, чтобы они рассекали носовой и кормовой точечные ориентиры пополам. Если оба ориентира находятся на линии, то судно находится на намеченной линии пути. Если судно начнет отклоняться от намеченного маршрута, отметки ориентиров сместятся с линии. Для того, чтобы вернуться на намеченную линию пути, курс судна (ОК – отметка курса) изменяют в сторону ориентиров.
Навигационная карта Экран РЛС
Рис.2 Ориентировка по носовому и кормовому ориентирам
Чем меньше расстояние между ориентирами и чем крупномасштабнее шкала наблюдения – тем быстрее судоводитель замечает боковое смещение судна с намеченного маршрута.
Ориентировка на участках с установкой буев по оси фарватера. Прием может быть применен на озерных участках водохранилищ (Рис.3).
Навигационная карта Экран РЛС
Рис.3 Ориентировка при следовании по осевой трассе
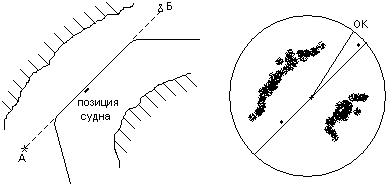
В качестве ориентиров используются осевые буи. Боковое смещение судна Д от оси судового хода определяется с помощью подвижного кольца дальности и визира, направленного параллельно линии осевых буев. Если используется параллельная индексная линия, то она наносится на экран РЛС параллельно линии осевых буев, и смещается влево относительно центра развертки на расстояние, на котором судоводитель планирует держаться от буев (Рис.4).
Рис.4 Следование по осевой трассе с использованием PIL
В этом случае контроль за положением судна осуществляется так же, как и при ориентировке по носовому и кормовому ориентирам. Нахождение отметок осевых буев на линии говорит о том, что судно следует по намеченной линии пути. При смещении отметок с линии своевременно вводится поправка в курсе на компенсацию замеченного отклонения.
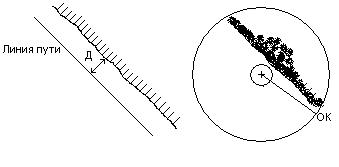
Ориентировка по ходовому берегу. Применяется на свободных и зашлюзованных реках и водохранилищах как на прямолинейных, так и на криволинейных участках пути. Применение приема эффективно в тех случаях, когда судовой ход проходит вдоль ходового берега. Подвижное кольцо дальности устанавливают на оптимальное значение дистанции до берега Д (Рис.5), и во время движения стараются управлять судном так, чтобы кольцо на экране РЛС всегда касалось радиолокационного изображения берега.
Рис.5 Ориентировка при следовании вдоль ходового берега
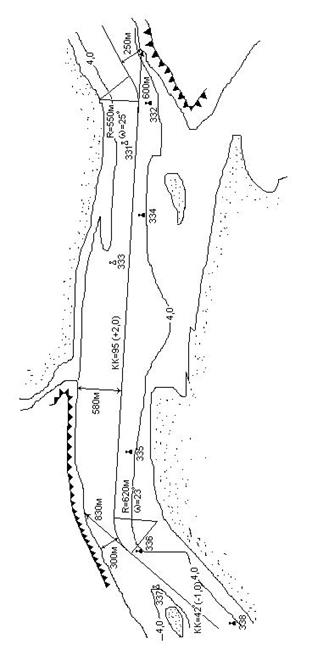
Неровности береговой черты мысленно сглаживаются. Берег может быть не только прямым, но и выпуклым, и вогнутым. На точность радиолокационной проводки относительно берега влияют точность используемых навигационных карт, изменение уровня воды относительно принятого при составлении навигационной карты, а также качество настройки РЛС. Ориентировка на участках с латеральной системой расстановки навигационных знаков. Типовой прием применяется на участках внутренних водных путей, где судовой ход обставлен буями правой и левой стороны. Маршрут движения рекомендуется запланировать так, чтобы он был направлен параллельно линии буев одной кромки, и по возможности делил расстояние между буями разных кромок пополам. Визир на экране РЛС (Рис.6) устанавливается параллельно линии кромочных буев, а боковое смещение определяется сравнением расстояний, на которых относительно линии визира расположены отметки буев разных кромок. Если отрезки равны между собой – судно находится на запланированной линии пути.
Навигационная карта Экран РЛС
Рис.6 Ориентировка при следовании по латеральной системе
Боковое смещение на криволинейных участках определяется с помощью сравнения положения центра развертки относительно мысленной линии, проходящей между отметками точечных ориентиров правой и левой кромок судового хода. Дублирование контроля за положением судна возможно с использованием подвижного кольца дальности, если движение выполняется вдоль ходового берега (Рис.7).
Навигационная карта Экран РЛС
Рис.7 Латеральная система, выполнение поворота
Ориентировка при следовании каналом. Ось судового хода , как правило, проходит посередине канала. Управлять судном следует так, чтобы центр развертки на экране РЛС находился посередине между отметок откосов канала. В случае, когда откосы канала вблизи центра развертки не просматриваются, боковое смещение оценивается с помощью визира. Визир устанавливается параллельно изображению откосов, и, если расстояние от правого и левого откосов до линии визира равны , то судно следует по оси канала (Рис.8).
Рис.8 Ориентировка при следовании каналом
При несимметричном расположении откосов вводится поправка в курсе, причем ее величина должна быть незначительной, так как большие отклонения от курса могут привести к посадкам на мель или повреждению винтов и рулей. Внимательно следует проходить уширения канала, где контроль за местоположением судна затруднен.
Предварительная проработка маршрута Одним из важных этапов обеспечения безопасности радиолокационной проводки судна в условиях ограниченной видимости является предварительная проработка маршрута. Она заключается в следующем: - тщательно изучается навигационная карта и лоция района плавания; - проверяется корректура навигационной карты; - на навигационной карте выделяют надежные радиолокационные ориентиры (мысы, ходовой берег, гидротехнические сооружения, русловые маяки и т.д.); - намечают приемы ориентировки для каждого прямолинейного и криволинейного участка; - выделяют особо опасные в навигационном отношении места (камни, затонувшие суда, подводные гряды); - намечают линию движения судна относительно радиолокационных ориентиров; - на прямолинейных участках указывают компасные курсы с учетом поправки компаса; - по возможности и при необходимости указывают расстояние плавания на каждом компасном курсе; - намечают точки поворотов, которые должны иметь инструментальную привязку относительно надежных радиолокационных ориентиров (траверз, курсовой угол, пеленг, дистанция); определяют угол поворота судового хода; - намечают безопасную скорость движения судна на каждом участке пути с учетом его особенностей (соотношение габаритов пути и размеров судна, наличие и близость навигационных опасностей, просматриваемость участка, наличие маломерного флота и т.д.); - определяют и указывают на карте радиусы поворотов; - если на судне имеется указатель угловой скорости поворота, то определяют значение угловой скорости по формуле
где V – скорость судна в км/ч; R – радиус поворота в км.
Предварительная проработка маршрута выполняется заранее. Судоводителям рекомендуется включать судовую РЛС в хорошую видимость, что дает возможность не только безошибочно опознавать различные эхо-сигналы, но и запомнить или отметить на навигационной карте особенности радиолокационного изображения отдельных естественных или искусственных объектов, используемых в качестве радиолокационных ориентиров. В хорошую видимость уточняются компасные курсы, контрольные значения инструментальных привязок точек поворота, значения угловой скорости поворота, углов перекладки руля и т.д. Таким образом, в условиях хорошей видимости судоводитель приобретает навыки в чтении радиолокационной информации и подготавливается к прохождению данного участка в условиях ограниченной видимости.
|
Последнее изменение этой страницы: 2019-03-21; Просмотров: 191; Нарушение авторского права страницы

 Навигационная карта Экран РЛС
Навигационная карта Экран РЛС