|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Область применения емкостных измерительных преобразователей⇐ ПредыдущаяСтр 60 из 60
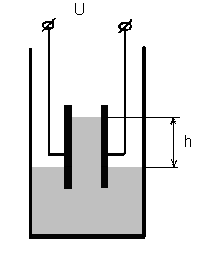
Емкостные преобразователи могут быть использованы при измерении различных неэлектрических величин по четырем направлениям: измеряемая неэлектрическая величина может быть функционально связана либо с δ, либо с S, либо с ε, либо с диэлектрическими потерями конденсатора. В последних двух случаях емкостные преобразователи можно применять для анализа состава вещества. При этом естественной входной величиной преобразователя будет состав вещества, заполняющего пространство между пластинами. Особенно широко емкостные преобразователи этого типа применяются при измерении влажности твердых и жидких тел. В подавляющем же большинстве случаев практического использования емкостных преобразователей их естественной входной величиной является геометрическое перемещение электродов относительно друг друга. Они используются в качестве уровнемеров, толщиномеров; для измерения влажности материалов; в качестве динамометров – приборов для измерения давлений сил; для измерения кручения вала; измерения вибраций, ускорений и т. д. Электростатические преобразователи с изменяющейся емкостью используются в различных датчиках прямого преобразования, а также как преобразователи неравновесия в датчиках уравновешивания. Область применения емкостных преобразователей весьма разнообразна, однако наиболее широко они используются для измерения малых перемещений и величин, легко преобразуемых в перемещение, например давлений. При современной технологии изготовления датчиков начальный зазор может быть доведен до 5 – 10 мкм и порог чувствительности по перемещению оценивается значениями порядка Принцип работы устройства, предназначенного для измерения высоких напряжений, основан на использовании в качестве чувствительного элемента конденсатора с жидким диэлектриком. Механизм чувствительности такого устройства заключается в том, что диполи диэлектрика в электрическом поле испытывают силовое воздействие со стороны поля. Возникающие силы стремятся упорядочить диполи и приблизить их друг к другу. В результате этого под действием электрического поля жидкость втягивается в область между обкладками, что обусловливает ее подъем на определенную высоту
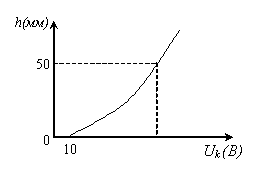
Рисунок 6.17 Зависимость высоты подъема диэлектрика в область между обкладками от измеряемого напряжения. При приложении к обкладкам электрического напряжения возникают кулоновские силы:
Если преобразователь включает в себя диэлектрик и воздушную прослойку, то
Для измерения температуры используют специальные сплавы, характеризующиеся достаточно высокой температурной зависимостью диэлектрической проницаемости (тиконд, тидол)
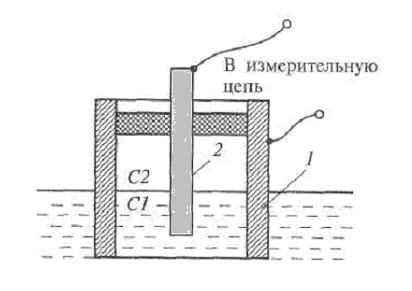
Для измерения малых концентраций веществ в различных средах используют ёмкостные высокочастотные бесконтактные измерительные преобразователи, включённые в цепь колебательного контура. Емкостные измерительные преобразователи широко применяются, например, для измерения уровня жидких и сыпучих сред.
Рисунок 6.18 Емкостный датчик уровня: 1,2— электроды.
К достоинствам ёмкостных преобразователей можно отнести: · высокую чувствительность; · малые силовые воздействия; · малые габаритные размеры; · большой частотный диапазон; · возможность работы в тяжёлых условиях. Недостатки ёмкостных преобразователей связаны с тем, что они имеют: · малую мощность сигнала; · результаты измерений зависят от влажности, давления, напряжения и частоты электрического поля. Для измерения малых размеров и микроперемещений используют специальные конструкции емкостных преобразователей с системой дополнительных электродов. Например, введение экранных (защитных) электродов позволяет существенно снизить влияние внешних электромагнитных наводок, повысить чувствительность устройств, исключить влияние краевого эффекта.
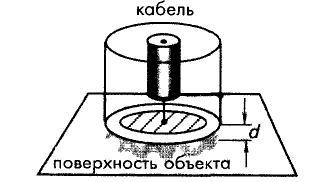
Рисунок 6.19 Емкостной датчик положения с экранирующим кольцом: А – поперечное сечение; Б – внешний вид.
На практике при измерении перемещения электропроводного объекта, его поверхность часто играет роль пластины конденсатора. Собственная пластина конденсатора должна быть экранирована, что позволяет повысить линейность преобразования и уменьшить влияние краевых эффектов. Типовой датчик перемещения работает на частотах в пределах нескольких мегагерц, поэтому может регистрировать быстрые перемещения объекта. Емкостные датчики могут работать и с непроводящими средами и объектами, но при этом их точность несколько ухудшается. Для улучшения метрологических характеристик таких датчиков используют «активные экраны», включая их в измерительную схему датчика.
Контрольные вопросы.
1. Какие измерительные цепи применяют для работы с емкостными преобразователями? 2. Какие факторы необходимо принимать во внимание при разработке емкостных измерительных преобразователей? 3. Дайте сравнительную характеристику измерительных схем включения емкостных преобразователей. 4. В чем суть краевого эффекта в емкостных измерительных преобразователях? 5. Дайте объяснение нелинейной зависимости диэлектрической проницаемости материалов от частоты электрического поля. 6. Как изменится диэлектрическая проницаемость газа при изменении давления, температуры? Литература 1. Электрические измерения неэлектрических величин / Под ред. П.В. Новицкого. – Л.: Ленинградское отд. Энергия, 1975. 2. Карлов Н.В., Кириченко Н.А. Колебания, волны, структуры. – М.: ФИЗМАТЛИТ, 2001. 3. Дубнищев Ю.Н. Колебания и волны: Учеб. пособие – 2-е изд. испр. и доп. – Новосибирск: Сиб. Унив. Изд-во, 2004. 4. Джексон Р.Г. Новейшие датчики. Москва: Техносфера, 2007. – 384 с. 5. Дж. Фрайден. Современные датчики. Справочник. Москва: Техносфера, 2005. – 592 с. 6. Колоколов А.А., Переверзев В.Г. Физические основы получения информации. Ч.2. Физические основы измерительных преобразователей (конспект лекций) МИЦ ГОУ ВПО МГТУ «Станкин», 2006. – 91с. 7. Николаева Е.В. Физические основы получения информации. Измерительные преобразователи. Принципы измерения физических величин. Учебное пособие / Е. В. Николаева, В. В. Макаров. – Омск: Изд-во ОмГТУ, 2007. – 96 с. 8. Физические основы получения информации: Учебное пособие для студентов учреждений высш. проф. Образования / В. Ю. Шишмарев.-М.: Издательский центр «Академия», 2010.-448 с. 9. Патрушев Е.М., Седалищев В.Н. Методические указания к лабораторным работам по курсу «Физические основы получения информации», часть 1-я. – Барнаул: Изд-во АлтГТУ, 2010. - 55с. 10. Седалищев В.Н. Методические указания к курсовому проектированию по дисциплине «Физические основы получения информации». – Барнаул: Изд-во АлтГТУ, 2010. - 41с.
ОГЛАВЛЕНИЕ Введение…………………...………………………….……………………3 Глава 1. Информационно-энергетические основы теории измерений 1.1 Понятие информации. Разновидности информации……………………4 1.2 Количественная оценка информации………………………………….....5 1.3 Связь понятий энергии и информации………...…………………………8 1.4 Применение энергоинформационного подхода к анализу физических процессов………..….………………………………………14 1.5 Связь теории информации с теорией измерений…………………….....22 1.6 Причины наличия ограничений количества информации, получаемой при измерениях………..……………………26 1.7 Естественные пределы измерений……………….……..……………….28 1.8 Разновидности шумов и причины их появления…………..……………30 1.9 Пути повышения информативности процессов измерительного преобразования……...…………………………………37 1.10 Общая характеристика этапов измерительного преобразования………40 Контрольные вопросы к главе 1 Глава 2. Физические основы измерительных преобразователей генераторного типа 2.1 Классификация физических эффектов………….………………………45 2.2 Физические основы электромеханических измерительных преобразователей генераторного типа……….…………………………51 2.3 Пьезоэлектричество………………………………………………………53 2.3.1 Методики расчета поверхностных зарядов, деформаций и механических напряжений при пьезоэффекте………………………56 2.3.2 Принцип работы пьезорезонансного измерительного преобразователя…………………………………………………………58 2.3.3 Применение пьезоэффекта в измерительной технике…………………61 2.3.4 Погрешности пьезоэлектрических преобразователей…….……………66 2.3.5 Конструкции пьезоэлектрических преобразователей……….…………66 2.4 Электрострикция………………...………………………………………..68 2.5 Электреты…………………………………………………………………71 2.6 Физические основы термоэлектрических измерительных преобразователей………………………………………………………….75 2.6.1 Пироэлектричество…………………………………………………….....75 2.6.2 Применение пироэффекта…..……………………………………………78 2.6.3 Термоэлектричество в проводниках и полупроводниках………………82 2.6.4 Применение термоэлектрических эффектов в измерительной технике………………………………………………….87 2.6.5 Разновидности термоэлектрических преобразователей и особенности их эксплуатации…………..……………………………..91 2.6.6 Погрешности термоэлектрических преобразователей…………………98 2.7 Гальваномагнитные эффекты ………...………………………………..100 2.7.1 Эффект Холла……………………..……………………………………..101 2.7.2 Параметры и характеристики датчиков Холла……..…………………103 2.7.3 Изготовление и применение датчиков Холла…………………………106 2.7.4 Метрологические характеристики датчиков Холла…..………………111 Контрольные вопросы к главе 2 Глава 3. Физические основы резистивных измерительных преобразователей 3.1 Принципы построения и разновидности резистивных преобразователей………………………………………………………115 3.1.1 Контактные преобразователи…….…………………………………….115 3.1.2 Резистивные преобразователи контактного сопротивления................118 3.2 Реостатные преобразователи…………...………………………………120 3.2.1 Применение реостатных преобразователей……...……………………123 3.3 Тензорезистивный эффект……………………...………………………126 3.3.1 Тензорезистивный эффект в проводниках…………………………….127 3.3.2 Тензорезистивный эффект в полупроводниках…….…………………128 3.3.3 Применение тензорезисторов…………………..………………………132 3.4 Магниторезистивный эффект…………………………………………..135 3.4.1 Магниторезистивный эффект в проводниках…………………………135 3.4.2 Магниторезистивные эффекты в полупроводниках……..……………137 3.4.3 Разновидности конструктивного исполнения магниторезисторов..…139 3.5 Терморезистивный эффект…………………………..…………………144 3.5.1 Терморезистивный эффект в проводниках…………………………....144 3.5.2 Физические основы полупроводниковых терморезистивных измерительных преобразователей…………...…………………………146 3.5.3 Области применения термосопротивлений…………………………....150 3.5.4 Разновидности термосопротивлений, применяемые материалы и основы расчета…………………………………………....151 3.5.5 Промышленные термометры сопротивления………………………....158 3.5.6 Измерительные цепи термометров сопротивления…...………………160 3.6 Физические основы фоторезистивных измерительных преобразователей……………………….………………………………..164 Контрольные вопросы к главе 3 Глава 4. Физические основы электрохимических измерительных преобразователей 4.1 Основные характеристики электрохимической ячейки……..……….168 4.2 Полярографический эффект в растворах……………………………....171 4.3 Кондуктометрические измерительные преобразователи….………….172 4.4 Электрокинетические явления в растворах…………….……………...175 4.5 Принцип работы гальванических измерительных преобразователей..176 Контрольные вопросы к главе 4 Глава 5. Физические основы электромагнитных измерительных преобразователей 5.1 Принцип работы магнитоиндукционных измерительных преобразователей генераторного типа…………………………………180 5.1.1 Индукционные преобразователи частоты вращения………………….180 5.1.2 Индукционные преобразователи параметров вибрации….…………..182 5.1.3 Магнитоиндукционный расходомер…………………….……………..183 5.2 Индуктивные преобразователи перемещения…………………………184 5.3 Погрешности индукционных преобразователей……...………………187 5.4 Трансформаторные преобразователи перемещения…………..………189 5.5 Дифференциальные трансформаторные прреобразователи перемещений……………………………………………………………192 5.6 Трансформаторный преобразователь перемещения c подвижной обмоткой……...…………………………………………..196 5.7 Принцип работы вихретоковых измерительных устройств……….....198 5.8 Физические основы магнитомодуляционных измерительных преобразователей……...………………………………200 5.8.1 Эффекты модуляции магнитных свойств материалов……..…………209 5.8.2 Пример реализации магнитострикционного эффекта в датчиках линейных перемещений……………………………………210 5.8.3 Дополнительные эффекты, возникающие в магнитомодуляционных преобразователях……………………………215 5.8.4 Эффект Виганда и устройства контроля на его основе…………….....219 5.9 Физические основы создания магнитоупругих измерительных преобразователей……………………………………..222 5.10 Зависимость магнитной проницаемости ферромагнетиков от влияющих факторов……………………………………………………225 5.11 Физические основы методов магнитного неразрушающего контроля…………………………………………….228 5.11.1 Индукционные преобразователи для магнитопорошковой дефектоскопии…………………………………………………………230 5.11.2 Магнитные индукционные головки…………………………………....232 5.11.3 Феррозондовые преобразователи…………...………………………….233 5.11.4 Гальваномагнитные преобразователи………………………………… 236 5.11.5 Магнитные ленты и магнитные порошки………...……………………237 5.11.6 Магнитодоменные преобразователи……………..…………………….238 5.11.7 Матричный магнитный преобразователь………...……………………241 5.11.8 Способы намагничивания и размагничивания объекта контроля……243 5.11.9 Способы размагничивания деталей………………………………….....245 Контрольные вопросы к главе 5 Глава 6. Физические основы емкостных измерительных преобразователей 6.1 Модуляция геометрических размеров емкостных преобразователей…..……………………………………………………249 6.2 Принципы работы емкостных измерительных преобразователей….. 251 6.3 Физические основы емкостных измерительных устройств, основанных на модуляции диэлектрических свойств веществ………254 6.3.1 Строение материалов………………...………………………………… 254 6.3.2 Виды связей и механизмы поляризации диэлектриков………………255 6.3.3 Влияние агрегатного состояния вещества на его диэлектрические свойства…….………………………………………..258 6.3.4 Устройство и принцип действия электростатических преобразователей……..…………………………………………………260 6.3.5 Эквивалентная схема электростатического преобразователя…..……262 6.3.6 Конструкции емкостных измерительных преобразователей…………264 6.3.7 Схема включения в измерительную цепь…………………………..…267 6.3.8 Метрологические характеристики емкостных преобразователей….. 273 6.3.9 Область применения емкостных измерительных преобразователей….……………………………………………………274 Контрольные вопросы к главе 6 Литература………………………………………………………………279 |
Последнее изменение этой страницы: 2019-03-22; Просмотров: 1165; Нарушение авторского права страницы
 (6.41)
(6.41) . (6.43)
. (6.43)