|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение направлений в море
Через любую точку земной поверхности можно провести отвесную линию, или вертикаль zA, которая укажет направление zn - зенит - надир. Горизонтальную плоскость НН' проходящую перпендикулярно отвесной линии и через место наблюдателя точку А, называют плоскостью истинного горизонта наблюдателя. Вертикальную плоскость LU, проходящую через земную ось и место наблюдателя, называют плоскостью истинного меридиана наблюдателя. Линия пересечения плоскости истинного меридиана наблюдателя с плоскостью истинного горизонта будет называться линией истинного меридиана, т. е. покажет направление линии NS, которая называется полуденной, так как в плоскости LL' Солнце бывает в полдень.
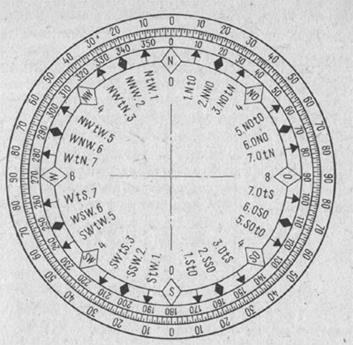
В судовождении приняты три системы деления горизонта: румбовая, круговая и четвертная. Румбовая система зародилась еще в эпоху парусного флота. В этой системе каждая четверть горизонта разбита на восемь частей, а весь горизонт на 32 части. Полученные 32 направления называются румбами. Румб представляет собой угол между двумя соседними направлениями, равный 1/32 части окружности, или 360° : 32 = 11 '/4°. Румбы делятся на четыре главные N, Ost, S, W, четыре четвертных NO, SO, SW, NW, восемь, расположенных между главными и четвертными румбами - трехбуквенные NNO, ONO, OSO и т. д., и промежуточные, которых шестнадцать. Для получения названия трехбуквенных румбов складываются названия главных и четвертных, между которыми они находятся. Название промежуточного румба образуется из названия ближайшего главного или четвертного румба, следующего за ним голландского слова "ten" (тэн), обозначающего предлог "к" и наименования главного румба, к которому приближается данный промежуточный румб, например NOtO, NWtN, NtO.
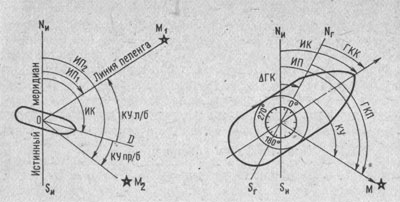
Картушка магнитного компаса Румбовая система применяется для обозначения направлений ветра, течения или других приближенных направлений. Слово румб сохранилось как термин, обозначающий какое-либо направление в море. В настоящее время основной является круговая система, которая используется для ведения прокладки на карте и во всех приборах, указывающих направление. И отсчет ведется от направлений N или S в сторону Ost или W от 0 до 90°. При такой системе деления горизонта направление указывается числом градусов с наименованием четверти. Например, NOst45°, SW36°. Счет градусов в NOst и SW четвертях ведется по направлению движения часовой стрелки, а в SOst и NW четвертях - против часовой стрелки. Четвертная система применяется обычно при астрономических определениях и при рассмотрении некоторых теоретических вопросов. Для перевода направления, данного по четвертному счету, в круговой следует: в первой (NOst) четверти оставить число градусов без изменения; во второй (SOst) данное число градусов вычесть из 180°; в третьей (SW) к данному числу градусов прибавить 180°; в четвертой (NW) данное число градусов вычесть из 360°. Наименование четверти при переходе от четвертного счета к круговому не пишется. Например, направлению SOst 36,0° в круговой системе будет соответствовать направление, равное 144,0°. В судовождении обычно приходится иметь дело с двумя направлениями - направлением движения судна и направлением на какой-либо объект. Направление движения судна может быть определено положением его диаметральной плоскости по отношению к плоскости истинного меридиана. Угол между нордовой частью плоскости истинного меридиана и носовой частью диаметральной плоскости судна называется истинным курсом (ИК) судна. Направление на какой-либо предмет определяется углом между нордовой частью плоскости истинного меридиана и вертикальной плоскостью, проходящей через место наблюдателя и наблюдаемый предмет, и называется истинным пеленгом (ИП). Истинный пеленг не зависит от направления диаметральной плоскости судна. На плоскости истинного горизонта ИК и ИП изображаются углами, одной стороной которых является истинный меридиан, а второй - или линия курса - след от диаметральной плоскости судна (при определении курса) - или линия пеленга - след вертикальной плоскости, проходящей через место наблюдателя и наблюдаемый объект.. Истинные курсы и истинные пеленги отсчитываются от нордовой части истинного меридиана наблюдателя по движению часовой стрелки от 0 до 360°. Угол между нордовой частью истинного меридиана и направлением от предмета на судно, отличающийся на 180° от истинного пеленга, называется обратным истинным пеленгом (ОИП). Угол между носовой частью диаметральной плоскости судна и направлением на данный предмет называется курсовым углом (КУ). Курсовые углы отсчитывают от носовой части диаметральной плоскости судна по правому и левому бортам от 0 до 180° (рис. 1). Из рис.1 находим: ИП2 = ИК+КУ пр/б; ИП1 = ИК-КУл/6. Если в первой формуле ИП2 получится больше 360°, то из этой величины надо вычесть 360°. Если во второй формуле ИК<КУ, то к ИК надо прибавить 360°. ^Из формулы ИП2=ИК+КУ пр/б можно получить КУ=ИП2-И К. При этом, если результат получится со знаком "плюс", КУ будет правого борта, если со знаком "минус" - левого борта. Если курсовой угол составляет 90° правого или левого борта, он называется траверзом судна. Так и говорят, например, "На траверзе правого борта - маяк".
Рис.1, 2 Если ЯЯ=Я/С+90°, то наблюдаемый предмет расположен на траверзе правого борта, а если ИП=ИК-90°, то объект расположен на траверсе левого борта. Гирокомпасные курсы и пеленги. Главная ось гирокомпаса под действием направляющей силы должна устанавливаться в плоскости истинного меридиана. Однако гирокомпас, как любой прибор, имеет поправку. Поэтому ось гирокомпаса устанавливается не в плоскости истинного меридиана, а в плоскости гироскопического. Курсы и пеленги, снимаемые с гирокомпаса, называются гирокомпасными (рис. 2). Гирокомпасным курсом (Г К К) называется угол в плоскости истинного горизонта, отсчитываемый по часовой стрелке от нордовой части гирокомпасного меридиана до носовой части диаметральной плоскости судна. Гирокомпасным пеленгом (ГКП) называется угол в плоскости истинного горизонта, отсчитываемый по часовой стрелке от нордовой части гирокомпасного меридиана до направления на ориентир. Горизонтальный угол между истинным и гироскопическим меридианами называется поправкой гирокомпаса АГК. Если нордовая часть гироскопического меридиана отклоняется к Ost от истинного меридиана, то поправка гирокомпаса называется остовой и ей приписывается знак "плюс", если к W, то поправка называется вестовой и ей приписывается знак "минус". Из рис. 7 можно установить следующую зависимость между истинными и гироскопическими курсами и пеленгами: И К = ГКК + ГК ГКК =ИК - ГК ИП = ГКП + ГК ГКП = ИП- ГК Отсюда поправка гирокомпаса ГК = ИК - ГКК = ИП- ГКП. Поправка гирокомпаса не зависит от магнитного поля Земли. Она меняется после чистки, разборки или ремонта, а также после каждого нового запуска гирокомпаса. Поэтому ее следует периодически определять. |
Последнее изменение этой страницы: 2019-03-22; Просмотров: 174; Нарушение авторского права страницы
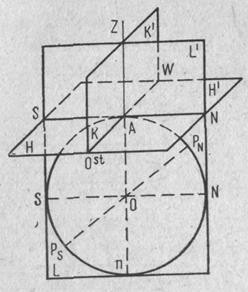 Вертикальная, плоскость КК', перпендикулярная плоскости истинного меридиана наблюдателя, называется плоскостью первого вертикала. Пересечение плоскости первого вертикала с плоскостью истинного горизонта образует на последней направление линии OstW. Для наблюдателя, находящегося в любой точке земного шара (за исключением полюсов, где отвесная линия совпадает с осью вращения Земли), линии NS и OstW указывают на основные стороны света - север, юг, восток, запад - на плоскости истинного горизонта. При этом для наблюдателя, обращенного лицом к северу, справа будет направление на восток, слева - на запад.
Вертикальная, плоскость КК', перпендикулярная плоскости истинного меридиана наблюдателя, называется плоскостью первого вертикала. Пересечение плоскости первого вертикала с плоскостью истинного горизонта образует на последней направление линии OstW. Для наблюдателя, находящегося в любой точке земного шара (за исключением полюсов, где отвесная линия совпадает с осью вращения Земли), линии NS и OstW указывают на основные стороны света - север, юг, восток, запад - на плоскости истинного горизонта. При этом для наблюдателя, обращенного лицом к северу, справа будет направление на восток, слева - на запад.