
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Показатели качества работы САРСтр 1 из 7Следующая ⇒
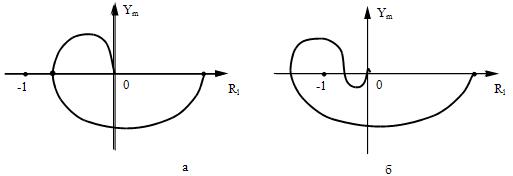
Понятие устойчивости Одним из первых вопросов, возникающих при исследовании и проектировании линейных систем управления, является вопрос об их устойчивости. Линейная система называется устойчивой, если при выведении ее внешними воздействиями из состояния равновесия (покоя) она возвращается в него после прекращения внешних воздействий. Если после прекращения внешнего воздействия система не возвращается к состоянию равновесия, то она является неустойчивой. Для нормального функционирования системы управления необходимо, чтобы она была устойчивой, так как в противном случае в ней возникают большие ошибки. Определение устойчивости обычно проводят на начальном этапе создания системы управления. Это объясняется двумя причинами. Во-первых, анализ устойчивости довольно прост. Во-вторых, неустойчивые системы могут быть скорректированы, т.е. преобразованы в устойчивые с помощью добавления специальных корректирующих звеньев. Анализ устойчивости с помощью частотных критериев Основным недостатком рассмотренного алгебраического подхода к анализу устойчивости является то, что в сложных системах управления трудно установить связь между корнями знаменателя рk , k=1, 2, …, n, и параметрами элементарных звеньев, составляющих систему управления. Это приводит к трудностям коррекции неустойчивых систем. Для того, чтобы упростить анализ устойчивости, желательно проводить этот анализ по передаточной функции H(p) разомкнутой системы управления. В 1932 г. американский ученый Найквист разработал эффективный метод анализа устойчивости усилителей с обратной связью. В 1938 г. советский ученый А.В. Михайлов обобщил метод Найквиста на замкнутые системы автоматического управления. Критерий Найквиста основан на построении годографа передаточной функции H(jw) разомкнутой системы управления. Годографом передаточной функции H(jw) называется кривая, прочерчиваемая концом вектора H(jw) =|H(jw)|ejj(w) на комплексной плоскости при измерении частоты w от 0 до бесконечности. Наиболее просто формулируется критерий устойчивости Найквиста: замкнутая система управления устойчива, если годограф передаточной функции H(jw) разомкнутой системы не охватывает на комплексной плоскости точку c координатами (-1, j0). На рисунках показаны примеры годографов устойчивой (рис. 16,а) и неустойчивой (рис. 16,б) систем управления.
Рис. 16. Если годограф проходит через точку -1, то говорят, что система находится на границе устойчивости. В этом случае на некоторой частоте H(jw0)= -1 и в системе могут существовать незатухающие колебания частоты w0. В неустойчивых системах уровень сигнала x(t) будет нарастать со временем. В устойчивых - уменьшаться. Запас устойчивости Еще одним достоинством рассматриваемого критерия является возможность определения запаса устойчивости системы управления. Запас устойчивости характеризуют двумя показателями: запасом устойчивости по усилению и запасом устойчивости по фазе. Запас устойчивости по усилению определяется величиной g =1/|H(jw0)|, где w0 - частота, на которой Запас устойчивости по фазе оценивается величиной угла Величина Dj показывает, насколько должна измениться фазовая характеристика разомкнутой системы управления, чтобы замкнутая система оказалась на границе устойчивости. Запас устойчивости по фазе обычно считается достаточным, если
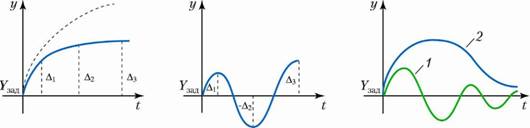
Рис. 17. Показатели качества работы САР Задача системы автоматического регулирования — устойчиво поддерживать заданное значение регулируемой величины в зависимости от внешних воздействий или изменять ее по определенной программе. Под устойчивостью системы понимается способность возвращаться к состоянию установившегося равновесия после устранения возмущения, нарушившего указанное равновесие. Большинство систем имеют ограниченную устойчивость, т. е. система устойчива, если нагрузка не выходит за допустимые пределы. В САР понятие устойчивости хорошо иллюстрируется реакцией системы на возмущающее или задающее воздействие. Рассмотрим временной график изменения регулируемого параметра y(t) при появлении возмущающего воздействия (рис. 2.2). Задача регулятора заключается в том, чтобы вычислить рассогласование A=Y^-y(t) сформировать управляющее воздействие и привести регулируемую переменную к заданному значению.
При этом могут возникнуть следующие варианты: • рис. 2.2, а — регулятор вырабатывает сигнал недостаточной величины. Это частично уменьшает скорость изменения рассогласования, однако само отклонение продолжает расти: Ді < Д2 < A3. График такого процесса изменения y(t) будет расходящимся (расходится с заданием), а работа САР — неустойчивой. • рис. 2.2, б — регулятор вырабатывает сигнал избыточной величины. Отклонение y(t) не только сводится к нулю, но и вызывается новое, противоположное по знаку и большее по амплитуде: Д3 > | — Д2І > Ді. График процесса регулирования такой САР также будет расходящимся, а работа САР — неустойчивой. • рис. 2.2, в — регулятор вырабатывает управляющий сигнал достаточной величины. При этом регулируемый параметр возвращается к заданному значению или плавно (апериодический процесс регулирования), или через затухающие колебания (колебательный процесс регулирования). Такие графики регулирования называются сходящимися, а работа САР в этом случае — устойчивой. Устойчивость системы обычно оценивается на стадии ее проектирования по одному из критериев, подробно изложенных, например, в [2]. Кроме устойчивости, любая САР должна обеспечить определенные качественные показатели процесса регулирования. Качество процесса регулирования обычно оценивается по переходной характеристике h(t) (рис. 2.3).
Переходная характеристика системы отражает процесс изменения регулируемой переменной во времени при строго определенной величине возмущающих или задающих воздействий x(t). В реальных системах возмущающие воздействия изменяются во времени произвольно. Однако для изучения поведения системы в процессе регулирования используют три характерных ее вида: ступенчатое, импульсное и синусоидальное (рис. 2.4).
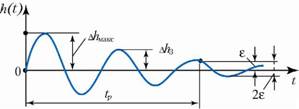
Для изучения свойств системы (переходной характеристики) обычно применяют ступенчатую нагрузку. Зная реакцию системы на ступенчатую нагрузку, можно определить процесс регулирования и при других типах нагрузки, так как с некоторым приближением переменную нагрузку на небольших участках можно заменить ступенчатой. Основными показателями качества регулирования являются: • установившаяся ошибка; • время регулирования; • перерегулирование; • колебательность процесса. Кроме того, в качестве косвенных оценок применяют некоторые величины, в той или иной степени, характеризующие отдельные особенности переходного процесса. Установившаяся ошибка (s) или точность регулирования определяется как разность двух значений регулируемой величины — установившегося после окончания переходного процесса Ууст и заданного Узад. 8 — Ууст — Узад — (2-0 Установившаяся ошибка может быть статической (Дстат) и динамической (ДдИн). В зависимости от вида ошибки САР соответственно подразделяют на статические и астатические (рис. 2.5).
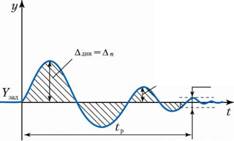
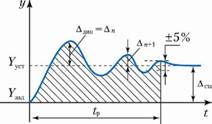
Пользуясь переходной характеристикой системы, вызванной единичным ступенчатым возмущающим воздействием (рис. 2.4, а), сформулируем основные параметры качества регулирования. Временем регулирования ґр называется время, в течение которого, начиная с момента приложения воздействия на систему, отклонения значений регулируемой величины y(t) от ее установившегося значения y (t)= yfo) будет меньше наперед заданного значения е0. Время регулирования определяет быстродействия переходного процесса. Обычно время регулирования отсчитывают с момента возникновения возмущающего воздействия до момента, когда отличие регулируемого параметра от заданной величины составляет не более ±5 %. Если заданная величина равно нулю, то берут ±5 % от величины динамической ошибки. Перерегулированием 5 называется максимальное отклонение регулируемой величины Ymax от установившегося значения 7уст, выраженное в процентах по отношению к 7уст. По сути это динамическая ошибка, отнесенная к номинальной величине регулируемого параметра. TOC o "1-3" h z 5= Ymax ~ 7уст • 100% = ^ • 100%. (2.2) Y Y Ус ус Колебательность системы характеризуется числом колебаний регулируемой величины за время регулирования tj,. Если за это время переходной процесс в системе совершит число колебаний меньше заданного, то считается, что система имеет требуемое качество регулирования в части ее колебательности. Часто пользуются интегрированным показателем качества. Для определения его величины вычисляют интеграл изменения выходного сигнала системы за период времени регулирования Р I = J[y(t)]2dt. Этот показатель учитывает как динамическую и статистическую ошибки, так и время регулирования. Чем они меньше, тем меньше величина интеграла I и выше качество работы САР. На практике часто требования к качеству работы системы автоматического регулирования задаются не в виде величин отдельных показателей качества, а в виде требования реализации оптимального режима регулирования. Наиболее часто используются три вида таких процессов: • апериодический; • с 20-процентным перерегулированием; • с минимальным интегральным показателем качества.
Сравнение этих процессов показано на рис. 2.6. Рис. 2.6. Сравнение процессов регулирования: 1 — апериодический; 2 — с 20-процентным перерегулированием; 3 — с минимальным интегральным показателем Выбор одного из этих процессов обычно производится на основе анализа автоматизируемого процесса как объекта управления. Например, при управлении работой компрессора по давлению даже кратковременная динамическая ошибка может быть очень опасна. Естественно, для такого объекта процесс с перерегулированием неприемлем.
|
Последнее изменение этой страницы: 2019-03-22; Просмотров: 397; Нарушение авторского права страницы
 (рис. 17,а). Запас устойчивости g показывает, во сколько раз должен измениться (увеличиться) модуль передаточной функции разомкнутой системы управления, чтобы замкнутая система оказалась на границе устойчивости. Требуемый запас устойчивости зависит от того, насколько в процессе работы может возрастать коэффициент передачи системы по сравнению с расчетным.
(рис. 17,а). Запас устойчивости g показывает, во сколько раз должен измениться (увеличиться) модуль передаточной функции разомкнутой системы управления, чтобы замкнутая система оказалась на границе устойчивости. Требуемый запас устойчивости зависит от того, насколько в процессе работы может возрастать коэффициент передачи системы по сравнению с расчетным. , где частота wсp , называемая частотой среза, определяется условием |H(jwcp)|=1 (рис. 17, б).
, где частота wсp , называемая частотой среза, определяется условием |H(jwcp)|=1 (рис. 17, б).
 А б в
Рис. 2.2. Графики процесса изменения выходного сигнала САР:
А — сигнал регулятора недостаточной величины (система неустойчива); б — сигнал регулятора избыточной величины (система неустойчива); в — сигал регулятора достаточной величины (система устойчива); 1 — колебательный затухающий процесс; 2 — апериодический процесс
А б в
Рис. 2.2. Графики процесса изменения выходного сигнала САР:
А — сигнал регулятора недостаточной величины (система неустойчива); б — сигнал регулятора избыточной величины (система неустойчива); в — сигал регулятора достаточной величины (система устойчива); 1 — колебательный затухающий процесс; 2 — апериодический процесс
 Б
Рис. 2.4. Типовые виды возмущающих воздействий:
А — ступенчатое (единичный скачок); б — импульсное; в — синусоидальное
Б
Рис. 2.4. Типовые виды возмущающих воздействий:
А — ступенчатое (единичный скачок); б — импульсное; в — синусоидальное
 А — статическая САР; б — астатическая САР
А — статическая САР; б — астатическая САР
 А б
Рис. 2.5. Классификация САР по типу ошибки:
А б
Рис. 2.5. Классификация САР по типу ошибки: