
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Тема 3. Синхронные машиныСтр 1 из 20Следующая ⇒
ЭМ-СM-C1-13.doc Отредактированный вариант ЭМ-СМ-C1-10.doc Электрические машины. Тема 3. Синхронные машины Вариант: 14.10.09. 21.08.10. 08.09.11. 22.09.11 13.10.11.06.09.13.09.09.13 ========================================================== ЭМ. Синхронные машины СМ. С О Д Е Р Ж А Н И Е.
Введение. (В конце лекций). Л Е К Ц И Я 1. (Вариант 19.07.09. 24.08.10. 0 6.09.1 3 ) 1.1. Принцип действия синхронного генератора 1.2. Типы синхронных машин и их устройство 1.3. Магнитное поле СМ. 1.4. Работа СГ на холостом ходе. 1.4.1. Общие положения. 1.4.2. Основные характеристики магнитного поля обмотки возбуждения. 1.4.3. Электромагнитные величины СМ в относительных единицах. .4.4. Магнитная характеристика машины. 1.4.5. Выводы.
Л е. к ц и я 2. ( 21.08.10 08.09.11) 2. Работа СГ в автономном режиме при нагрузке. 2.1. Реакция якоря. 2.1.1. Общие положения. 2.1.2. Продольная и поперечная реакции якоря.
Л е к ц и я 3. ( Вариант 20.07.09. 22.09.11. ) 3. Магнитные поля и ЭДС реакции якоря СГ. 1. Амплитуда первой гармоники МДС якоря. 3.1. Магнитные поля и ЭДС неявнополюсной машины. 1.1. Магнитные проводимости для потоков реакции якоря. 1.2. Индукция основной гармоники поля, максимальная. 1.3. Магнитные потоки реакции якоря. 1.4. Суммарный поток. 1.5. Индуктивные сопротивления реакции якоря Xa. 1.6. Индуктивное сопротивление рассеяния. 1.7. ЭДС в обмотке статора наведенная потоком реакции якоря. 1.8. ЭДС в обмотке статора наведенная потоком рассеяния Фσ. 1.9. Суммарная ЭДС в обмотке статораю. 3.2. Магнитные поля и ЭДС явнополюсной машины. 2.1.Удельные магнитные проводимости по различным осям машины. 2.2. Индукция основной гармоники поля, максимальная. 2.3. Магнитные потоки реакции якоря. 2.4. Суммарный магнитный поток. 2.5. Индуктивные сопротивления реакции якоря. 2.6. Индуктивное сопротивление рассеяния. 2.7. ЭДС в обмотке статора наведенная потоками реакции якоря. 2.8. ЭДС в обмотке статора наведенная потоком рассеяния Фσ. 2.9. Cуммарная ЭДС в обмотке статора. 2.10. Синхронные индуктивные сопротивления. 3.3. Приведение электромагнитных величин обмоток СМ. 1.Эквивалентная МДС возбуждения: 2. Приведение токов. 3.3. Магнитные поля и параметры успокоительной обмотки. 3.4. Уравнения напряжений синхронного генератора 3.5. Полные векторные диаграммы.
Л Е К Ц И Я 4. Вариант ( 20.07.09. 22.09.11) 4. Характеристики СГ. 4.1. Характеристики холостого хода. ( ХХХ ). 4.2. Характеристика короткого замыкания. ( Х.К.З.). 4.3. Опытное определение Xd. 4.4. Отношение короткого замыкания. 4.5. Опытное определение Xd и Xq из опыта скольжения. 4.6. Внешняя характеристика. 4.7. Регулировочные характеристики. 4.8. Нагрузочная характеристика. 4.9. Индуктивное сопротивление Потье.
Л Е К Ц И Я 5. (23.07.09.30.09.10). 5.1. Диаграмма Потье. 5.2. Диаграмма неявнополюсного синхронного генератора. 5.3. Выводы. 5.4. Рабочие характеристики синхронного генератора.
Л Е К Ц И Я 6. ( 25.07.09. 11.10.10.). 6.1. Параллельная работа синхронных генераторов. 6.1.1. Включение СГ на параллельную работу. 6.1.2. Нагрузка СГ, включенного на параллельную работу. 1. Режим холостого хода при Eo = U. 2. Режим холостого хода при Eo < U. 3. Режим холостого хода при Eo > U. 4. Режим нагрузки при Eo=U.
Л Е К Ц И Я 7. (29.07.09). 7.1. Угловые характеристики явнополюсного CГ. 7.1.1. Неявнополюсная машина. 7.1.2. Невозбужденная явнополюсная машина. 7.1.3. Угловая характеристика реактивной мощности. 7.2. Работа СМ при постоянной мощности и переменном возбуждении. 7.3. Статическая устойчивость. 7.4. Влияние тока возбуждения на статическую устойчивость
Л Е К Ц И Я 8. 8.1. Переходные процессы в синхронных генераторах. 8.1.1. Внезапная нагрузка СГ. 8.1.2. Трехфазное короткое замыкание СГ. 8.2.Синхронные двигатели. 8.2.1. Применение синхронных двигателей. 8.2.2. Способы пуска синхронных двигателей. 8.2.3. Векторная диаграмма СД. 8.2.4. Рабочие характеристики СД. 8.2.5. Угловые характеристики явнополюсного CД. 8.2.6. U - образные характеристики СД. 8.2.7. Синхронные компенсаторы.
Лекция 9. (06.08.09) 9.1. Синхронные двигатели. 9.1.1. Применение синхронных двигателей. 9.1.2. Способы пуска синхронных двигателей. 9.1.3. Векторная диаграмма СД. 9.1.4. Рабочие характеристики СД. 9.5. Угловые характеристики явнополюсного CД. 9.6. U - образные характеристики СД. 9.7. Синхронные компенсаторы.
Л Е К Ц И Я 10. 10. Специальные синхронные машины. 10.1. Синхронные магнитоэлектрические двигатели. 10.2. Синхронные магнитоэлектрические двигатели с когтеобразными полюсами. 10.3. СГ с когтеобразными полюсами и электромагнитным возбуждением 10.4. Синхронные реактивные двигатели. 10.5. Гистерезисные двигатели. 10.6. Индукторные синхронные машины. 10.7. СИНХРОННЫЕ МАШИНЫ ПРОДОЛЬНО-ПОПЕРЕЧНОГО ВОЗБУЖДЕНИЯ, АСИНХРОНИЗИРОВАННЫЕ МАШИНЫ 10.8. Вентильные двигатели. 10.9. Шаговые двигатели.
СМ. 1.1. 10.02.07. 21.08.10. О тпечатано 24.08.10.
Тема 3. Синхронные машины.
ЛЕКЦИЯ 1. ( Проверен 21.08.10. 0 6.09.1 3 )
1.1. Принцип действия синхронного генератора Для изучения принципа действия синхронного генератора воспользуемся упрощенной моделью синхронной машины (рис. 1.1). Неподвижная часть машины, называемая статором, по конструкции полностью аналогична статору асинхронной машины с обмоткой.
Рис. 1.1. Упрощенная модель синхронного генератора
Вал ротора механически связан с приводным двигателем (на рисунке не показан). В реальном синхронном генераторе в качестве приводного двигателя может быть использован двигатель внутреннего сгорания либо турбина. Под действием вращающего момента приводного двигателя ротор генератора вращается с частотой п против часовой стрелки. При этом в обмотке статора в соответствии с явлением электромагнитной индукции наводится ЭДС, направление которой показано на рисунке стрелками. Так как обмотка статора замкнута на нагрузку Z, то в цепи этой обмотки появится ток i1. В процессе вращения ротора магнитное поле постоянного магнита также вращается с частотой п , а поэтому каждый из проводников обмотки статора попеременно оказывается то в зоне северного (N) магнитного полюса, то в зоне южного (S) магнитного полюса. При этом каждая смена полюсов сопровождается изменением направления ЭДС в обмотке статора. Таким образом, в обмотке статора синхронного генератора наводится переменная ЭДС, а поэтому ток i1 в этой обмотке и в нагрузке Z также переменный.
СМ. 1.2. 10.02.07. 21.08.10.
Мгновенное значение ЭДС обмотки статора в рассматриваемом синхронном генераторе (В)
e1 = B d * 2 * l * v = B d * 2 * l * p * Dl * n / 60 (1.1) где B d — магнитная индукция в воздушном зазоре между сердечником статора и полюсами ротора, Тл; l — активная длина одной пазовой стороны обмотки статора, м; v = p * Dl * n / 60 — скорость движения полюсов ротора относительно статора, м/с; Dl — внутренний диаметр сердечника статора, м. Частота ЭДС синхронного генератора f 1 (Гц) прямо пропорциональна частоте вращения ротора п (об/мин), которую принято называть синхронной частотой вращения:
f 1= pτ * n / 60 (1.2) Здесь рτ — число пар полюсов; в рассматриваемом генераторе два полюса, т.е. рτ = 1. Для получения промышленной частоты ЭДС (50 Гц) ротор такого генератора необходимо вращать с частотой п = 3000 об/мин, тогда
f 1 = pτ * n / 60 = 1 * 3000 / 60 = 50 Гц. (1.3)
Постоянные магниты на роторе применяются лишь в синхронных генераторах весьма малой мощности, в большинстве же синхронных генераторов для получения возбуждающего магнитного поля применяют обмотку возбуждения , располагаемую на роторе. Эта обмотка подключается к источнику постоянного тока через скользящие контакты, осуществляемые посредством двух контактных колец, располагаемых на валу и изолированных от вала и друг от друга, и двух неподвижных щеток. Как уже отмечалось, приводной двигатель (ПД) приводит во вращение ротор синхронного генератора с синхронной частотой п . При этом магнитное поле ротора также вращается с частотой п и индуцирует в трехфазной обмотке статора переменные ЭДС ЕА, ев, ес, которые, будучи одинаковыми по значению и сдвинутыми по фазе относительно друг друга на Уг периода (120 эл. град), образуют трехфазную симметричную систему ЭДС. С подключением нагрузки в фазах обмотки статора появляются токи ia, ib, Ic - При этом трехфазная обмотка статора создает вращающееся магнитное поле. Частота вращения этого поля равна частоте вращения ротора генератора (об/мин):
n = 60 * f 1 / рτ (1.4)
Таким образом, в синхронном генераторе поле статора и ротор вращаются синхронно, отсюда и название — синхронные машины .
СМ. 1.3. 05.01.06. 10.02.07.
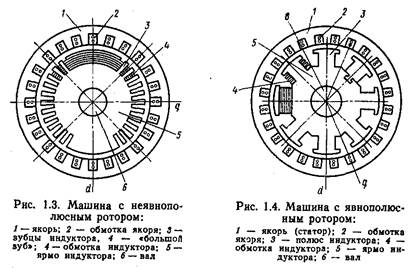
1.2. Типы синхронных машин и их устройство. Как уже отмечалось, синхронная машина состоит из неподвижной части — статора — и вращающейся части — ротора. Статоры синхронных машин в принципе не отличаются от статоров асинхронных двигателей, т. е. состоят из корпуса, сердечника и обмотки. Конструктивное исполнение статора синхронной машины может быть различным в зависимости от назначения и габаритов машины. Так, в многополюсных машинах большой мощности при наружном диаметре сердечника статора более 900 мм пластины сердечника делают из отдельных сегментов, которые при сборе образуют цилиндр сердечника статора. Корпуса статоров крупногабаритных машин делают разъемными, что необходимо для удобства транспортировки и монтажа этих машин. Роторы синхронных машин могут иметь две принципиально различающиеся конструкции: явнополюсную и неявнополюсную. В энергетических установках по производству электроэнергии переменного тока в качестве первичных (приводных) двигателей синхронных генераторов применяют в основном три вида двигателей: паровые турбины, гидравлические турбины либо двигатели внутреннего сгорания (дизели). Применение любого из перечисленных двигателей принципиально влияет на конструкцию синхронного генератора. Если приводным двигателем является гидравлическая турбина , то синхронный генератор называют гидрогенератором. Гидравлическая турбина обычно развивает небольшую частоту вращения (60—500 об/мин), поэтому для получения переменного тока промышленной частоты (50 Гц) в гидрогенераторе применяют ротор с большим числом полюсов. Роторы гидрогенераторов имеют явнополюсную конструкцию , т. е. с явно выраженными полюсами, при которой каждый полюс выполняют в виде отдельного узла, состоящего из сердечника 1, полюсного наконечника 2 и полюсной катушки 3 (рис. 1.2, а). Все полюсы ротора закреплены на ободе 4 , являющемся также и ярмом магнитной системы машины, в котором замыкаются потоки полюсов. Гидрогенераторы Обычно изготовляются с вертикальным расположением вала.
Рис. 1.2. Конструкция роторов синхронных машин: а — ротор с явно выраженными полюсами; б — ротор с неявно выраженными полюсами
СМ. 1.4. 05.01.06. 10.02.07. Паровая турбина работает при большой частоте вращения, поэтому приводимый ею во вращение генератор, называемый турбогенератором, является быстроходной синхронной машиной. Роторы этих генераторов выполняют либо двухполюсными (n = 3000 об/мин), либо четырех полюсными ( п = 1500 об/мин). В процессе работы турбогенератора на его ротор действуют значительные центробежные силы. Поэтому по условиям механической прочности в турбогенераторах применяют неявною люсный ротор, имеющий вид удлиненного стального цилиндра с профрезерованными на поверхности продольными пазами для обмотки, возбуждения ( рис. 1.2, б). Сердечник неявнополюсного ротора изготовляют в виде цельной стальной поковки вместе с концами вала или же делают сборным. Обмотка возбуждения неявнополюсного ротора занимает лишь 2/3 его поверхности (по периметру). Оставшаяся 1/3 поверхности образует полюсы. Для защиты лобовых частей обмотки ротора от разрушения действием центробежных сил ротор с двух сторон прикрывают стальными бандажными кольцами (каппами), изготовляемыми обычно из немагнитной стали. Турбогенераторы и дизель генераторы изготовляют с горизонтальным расположением вала. Дизель генераторы рассчитывают на частоту вращения 600—1500 об/мин и выполняют с явнополюсным ротором. Большую группу синхронных машин составляют синхронные двигатели , которые обычно изготовляются мощностью до нескольких тысяч киловатт и предназначены для привода мощных вентиляторов, мельниц, насосов и других устройств, не требующих регулирования частоты вращения, например двигатели СДН2. Двигатели этой.серии изготовляются мощностью от 315 до 4000 кВт при частотах вращения от 300 до 1000 об/мин и предназначены для включения в сеть частотой 50 Гц при напряжении 6 кВ.
СМ. 1.5. 19.07.09 21.08.10. Магнитное поле СМ. Магнитные системы явнополюсной машины приведены на рис.1.3, а неявнополюсной на рис.1.4.
В режиме холостого хода синхронной машины, т.е. при отсутствии тока в обмотке статора основной магнитный поток синхронной машины замыкаясь в магнитной системе машины, проходит ряд участков сцепляется с обмоткой статора и наводит в ней ЭДС. Среди магнитный участков цепи можно выделить 1 - воздушный зазор, dа, - Fd = Фd * Rmd =Вd * St * d * Kd/m; 2 - зубцы статора, Z1, - Fz1; 3 - зубцы ротора, Z2, - Fz2; 4 - полюс ротора, h2, - Fh2; 5 - обод ротора, lоб, - Fоб; 6 - спинку статора, - Fcп1. Где: F d = Ф d * Rm d = Вd * St * d * Kd/(m0* St) = В d * d * K d/ m0; (1.5) [ Ф d] [ Rm d] Fj = Ф j * Rmj = Вj * St * lj * /(mj* St) = В j * lj / m j; (1.6) [ Ф j] [ Rmj]
Сумма магнитных напряжений на всех перечисленных участках магнитной цепи определяет МДС обмотки ротора на пару полюсов в режиме холостого хода.
Ff = 2 * F d + 2 * Fz1 + 2 * Fz2 + 2 * Fh2 + Fcп1 + Fоб (1.7)
Ff = If * wf / (2 * рτ ) (1.8) При расчете магнитного напряжения необходимо учитывать, что кроме основного потока в машине Ф существуют потоки рассеяния обмотки статора Фс1 и обмотки ротора Фс2.
СМ. 1.6. 20.02.2005. 05.01.06. 24.08.10.
Работа СГ на холостом ходе. Основные положения. При холостом ходе магнитный поток создается обмоткой возбуждения ротора (индуктора). Этот магнитный поток при вращении ротора со скоростью n, наводит в обмотке статора ЭДС с частотой f1 = рτ * n / 60. Мгновенное значение ЭДС обмотки статора в рассматриваемом синхронном генераторе согласно (1):
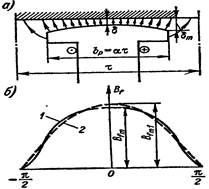
e = B d * 2 * l * v = B d * 2 * l * n * Dl * nl / 60 Эта формула показывает, что при неизменной частоте вращения ротора форма кривой переменной ЭДС обмотки якоря определяется исключительно законом распределения магнитной индукции B d в зазоре. Если бы график магнитной индукции в зазоре представлял собой синусоиду ( B d= B dmax sin a ), то ЭДС генератора была бы синусоидальной, т.е. для получения синусоидальной ЭДС в обмотки необходимо иметь синусоидальное распределение индукции в воздушном зазоре. Однако получить синусоидальное распределение индукции в зазоре практически невозможно. Для анализа работы синхронной машины несинусоидальное распределение индукции под полюсом разлагают в ряд Фурье и рассматривают работу машины для всех гармоник раздельно. Поскольку наличие высших гармонических в напряжении генератора вызывает ряд нежелательных явлений у потребителя, в частности повышенные потери, и, следовательно, снижение к.п.д. Поэтому на несинусоидальность напряжения СМ, работающих в качестве генераторов налагаются жесткие ограничения. Так согласно ГОСТ 183 - 74 коэффициент гармоник в линейном напряжении синхронного генератора мощностью более 100 кВт не должен превосходить 5 %. Эти ограничения накладываются и на форму поля в воздушном зазоре СМ. Для приближения распределения магнитной индукции в зазоре к синусоидальному применяются следующие меры: 1. В явнополюсных машинах распределение МДС под полюсом приближается к прямоугольному поэтому если края полюсов скосить так, чтобы зазор на краях полюсных наконечников был равен dmах (как это показано на рис. 1.5), то график распределения магнитной индукции в зазоре приблизится к синусоиде (кривая 2), а следовательно, и график ЭДС, наведенной в обмотке генератора, приблизится к синусоиде. Поэтому для приближения индукции к синусоидальному распределению, в этих машинах, зазор под полюсом делается неравномерным.
СМ. 1.7. 05.01.06. 21.08.10.
1. В явнополюсных машинах распределение МДС и индукции под полюсом приведено на рис.1.5.
Рис. СМ. 1.5. . Распределение МДС и индукции под полюсом явнополюсного СГ. Явнополюсная машина.dm / d1 = 1-2.5. d / t = 0.01-0.05. a = Bp/ t. a = 0.65-0.75.
Отношение максимальной индукции первой гармоники к действительной максимальной называется коэффициентом формы поля Kf. Kf = Bf 1 m / Bfm (1.9)
2. В неявнополюсных машинах выполнятся распределенная обмотка возбуждения на роторе и распределение МДС и индукции под полюсом СГ приведено на рис. 1.6. В этих машинах ширина паза по сравнению с величиной зазора невелика, а число пазов ротора велико, поэтому влиянием пазов ротора можно пренебречь, и можно принять, что кривая распределения МДС трапецевиднaя. В этом случае можно рассматривать обмотку ротора как распределенную с полным шагом с коэффициентом распределения Коб f:
где g - по рис. (1.6)
Рис. СМ.1.6. Распределение МДС и индукции под полюсом СГ. б. Неявнополюсная машина. g = 2 * а1 / t = 1 - Bp / t = 1 - a g = 0.65-0.8.
Несмотря на все принятые меры достичь полной синусоидальности распределения индукции под полюсом невозможно и невозможно получение синусоидального напряжения.
СМ. 1.8. 05.01.06. 24.08.10. 03.09.11.
Индукция в зазоре. Рис. 1.5., 1.6. 2.1.Максимальная величина. [Волдек с. 624 (32.3)]
Bfm = L0 * Ffm
L0 = m0 /( Km * K d * d0) где: L0 - удельная магнитная проводимость зазора. Kd - коэффициент воздушного зазора. Km - коэффициент насыщения. d0 - зазор по оси d (минимальная величина зазора).
2.2. Амплитуда основной гармоники индукции:. [Волдек с. 624 (32.3)]
Bf1 m = Kf * Bfm
Kf - коэффициент формы поля возбуждения. [ Бруск. с.91]
Kf =0.9 - 1.2 ¦ Kf = 1.065 - 0.965
СМ. 1.9. 25.02.2005. 24.08.10. 06.09.13
Продолжение таблицы 1.1. -------------------------------------------------------------------------------------------------- Явнополюсная машина. ¦ Неявнополюсная машина. -------------------------------------------------------------------------------------------------- Магнитный поток. 3.1. Поток основной гармоники, [Вольдек с. 624]:
Фf1 = 2 / p * Bfm1 * t * li
3.2. Поток полный [Ив-См. с. 515 (53.2). Вольдек с.629]:
Фf = Фf1* Кф
где Кф - коэффициент потока возбуждения.[Вольдек с. 630 (32.20)]
Кф = f(a) ¦ Кф = f(g) ¦ Кф = 0.92 - 1.08 [Бр.с.91] ¦ Кф = 0.995 - 0.975
4. Потокосцепление с продольной осью машины:
Y f1 = Kоб1 * Ф f1 * w1 / 2 рτ
где: w1 - число витков обмотки статора.
Выводы. Напряжение на выходе как явнополюсных, так и неявнополюсных СГ - НЕСИНУСОИДАЛЬНО. Поскольку не синусоидальность питающего напряжения для большинства потребителей приводит к резкому ухудшению их характеристик, на не синусоидальность формы напряжения СГ накладываются строгие ограничения. Так согласно ГОСТ 183 - 74 коэффициент гармоник в линейном напряжении синхронного генератора мощностью более 100 кВт не должен превосходить 5 %. Для получения напряжения соответствующего данному стандарту СГ применяются следующие меры по улучшению формы генерируемого напряжения: - Для явнополюсных СГ - неравномерный зазор под полюсом ротора. - Для неявнополюсного СГ - распределенная обмотка возбуждения на роторе. Эти меры позволяют получить форму напряжения, удовлетворяющую стандартам. Полной синусоидальности получить практически невозможно.
СМ.2.1. 19.07.09. Отпечатано: 19.07.09. Просмотрено 24.08.10
Тема 3. Синхронные машины. Лекция 2. (21.08.10. 08.09.1 3 ) 2. Работа СГ в автономном режиме при нагрузке. 2.1. Реакция якоря. 2.1.1. Общие положения. При работе СГ в автономном режиме положим, что нагрузка в фазах генератора симметрична. В этом случае в фазах обмотки статора протекают одинаковые токи, сдвинутые на 120 град. Эти токи создают магнитное поле статора Фа, вращающееся с частотой вращения ротора. Следовательно, это поле неподвижно относительно поля Фf, создаваемого индуктором генератора. В результате этого в машине создается суммой МДС статора (якоря) - Fa и ротора Ff, общий магнитный поток Фа, равный сумме потоков статора и индуктора,
Фо = Фа + Фf, (2.1.)
МДС обмотки ротора не зависит от нагрузки, а МДС обмотки статора зависит от нагрузки. Иными словами, при нагрузке обмотка якоря синхронной машины током создается собственное магнитное поле якоря, которое называется полем реакции якоря. Воздействие МДС якоря на магнитное поле машины называется реакцией якоря. Реакция якоря синхронной машины оказывает весьма значительное влияние на характеристики синхронной машины, как при установившемся режиме, так и при переходных режимах работы. Рассмотрим, как проявляется реакция якоря в двух синхронных генераторах разной конструкции ротора: неявнополюсной и явнополюсной. Можно выделить две оси симметрии индуктора: - ось, проходящую по оси полюса называемую продольной осью или осью d; - ось, проходящую между полюсами и называемую поперечной осью или осью q. Угол между этими осями составляет 90 эл. градусов. Для явнополюсной машины зазор по продольной оси d мал, а по поперечной оси q, велик, в неявнополюсной зазоры равны Ввиду несимметричного устройства индуктора явнополюсной машины целесообразно рассматривать действие реакции якоря по продольной и поперечной осям в отдельности. Метод такого рассмотрения был предложен французским электротехником А. Блонделем в 1895 г и называется методом двух реакций.
СМ. 2.2. 19.07.09. 04.09.11.
Метод двух реакций основан на принципе наложения полей, при котором предполагается, что магнитные потоки, действующие по продольной оси, не влияют на магнитные потоки, действующие по поперечной оси и наоборот. Это верно при отсутствии насыщения. Влияние насыщения оценивается отдельно и этот процесс очень сложен.
Рис. 3.1. Максимум Fad1m совпадает с продольной осью d, а максимум Faq1m совпадает с поперечной осью q. СМ. 3.2. 11.02.07. 20.07.09. СМ. 3.3. 17.09.10. 11.10.10. 1 4.09.11 1.5. Индуктивные сопротивления реакции якоря Xa. на один полюс можно определить исходя их следующего выражения [Костенко. с. 179. Кацман Xd и Xq с. 258]: Ф * w=L*i
Xa = w 1 * La = w 1 * Ф * w / I = Фа 1* w 1/(2* pτ ) * K об /( I 1 a)
Для неявнополюсной машины Xad = Xaq = X a. X a = (0.9-2.4 ) [Бр. с.106].
Рис. 3.2. 2.1. Удельные эквивалентные магнитные проводимости по различным осям машины. Вследствие неравномерности воздушного зазора [Костенко с. 177 ( 8.17)]: По оси d: L d = L 0 * Kd ( Kd = ( a * π ¶ + SIN ( a * p ) / p ) По оси q: L q = L 0 * Kq ( Kq = ( α * p - SIN ( a * p ) / p ) Kd, Kq - коэффициенты формы поля реакции якоря. [Кацман. с.258]. СМ. 3.5. 25.02.2006. 11.02.07.20.07.09. Суммарный магнитный поток.
Ф d 1 = Ф f1 + Ф ad1 + Ф aq1 + Фσ Потоки Фad1 и Фaq1 вращаются синхронно с ротором и наводят в обмотке статора соответствующие ЭДС, которые называются продольной и поперечной реакцией якоря. Фσ – поток рассеяния обмотки статора, создает ЭДС рассеяния Еσ. 2.5. Индуктивные сопротивления реакции якоря [Костенко с. 181 ]: По оси d: Xad = Xa * Kd По оси q: Xaq = Xa * Kq Xad и Xaq собственные индуктивные сопротивления обмотки якоря СГ соответствующие полям продольной и поперечной реакции якоря и называемые индуктивными продольными и поперечными сопротивлениями реакции якоря. СМ. 3.6. 11.02.07. 20.07.09. ЭДС рассеяния по оси d E σ d = E σ * SIN ( Y) = X σ * I * SIN ( Y) = X σ * Id ЭДС рассеяния по оси q E σ q = E σ * COS ( Y) = X σ * I * COS ( Y) = X σ * Iq 2.9. Cуммарная ЭДС в обмотке статора: Eo 1 = Ef 1 + Ead + Eaq + Еσ d + Еσ q
СМ. 3.7. 11.02.07. 23.09.10. 15.09.11. Эти сопротивления называются продольным и поперечным индуктивным синхронным сопротивлением обмотки якоря. Причем слово " СИНХРОННЫЕ" подчеркивает, что эти сопротивления соответствуют нормальному установившемуся синхронному режиму работы при симметричной нагрузке. Векторные диаграммы приведены на рис. 3.3 и 3.4. Чем сильнее реакция якоря, тем больше сопротивления Xad и Xaq и тем меньше запас устойчивости при работе машины. Величины Xad и Xaq обратно пропорциональны величине воздушного зазора. Для получения устойчивой машины величины Xad и Xaq необходимо уменьшать, т.е. увеличивать воздушный зазор. Но увеличение зазора ведет к увеличению обмотки возбуждения, а, следовательно, и всей машины, т.е. к ее удорожанию. Приведение токов. Для приведения токов: [Костенко (8.11). с. 172.]:
Fad1m = m1 * Ö 2 / p * I1 * Коб 1 w1 / pτ
получим следующие выражения для получения приведенных токов в обмотке возбуждения эквивалентного тока якоря I1d: Ifed = m1 * Ö 2 / p * w1 / wf * Коб 1 * I1 * Kad = KIaf * I1 * Kad Где KIadf = m1 * Ö 2 / p * w1/ wf * Коб 1 Аналогично для составляющей по поперечной оси: Kaq = Kq / Kf Ifeq = m * Ö 2 / p * w1 / wf * Коб 1 * I1 * Kaq = KIaf * I1 * Kaq Где KIaqf = m1 * Ö 2 / p * w1/ wf * Коб 1 В неявнополюсной машине Kd = Kq = 1 и Kad = Kaq = 1/ Kf и приведение НС якоря к обмотке возбуждения осуществляется аналогично.
3.3. Магнитные поля и параметры успокоительной обмотки. В нормальном установившимся режиме работы СМ основная гармоника реакции якоря, вращающаяся синхронно с ротором, неизменна по величине и поэтому токов в успокоительной обмотке не индуцирует. Однако при неустановившихся, не симметричных и других особых режимах работы потоки поля реакции якоря Фad и Фaq пульсируют во времени и индуктируют в успокоительной обмотке значительные по величине токи. Эти токи, взаимодействуя с потоком СМ, создают моменты, стабилизирующие работу СМ. В неявнополюсной машине роль стабилизирующей обмотки выполняет массивный ротор.
СМ. 3.9. 28.08.2010. 23.09.10. 22.09.11.
СМ. 3.10. 11.02.07.20.07.09. 23.09.10
Ea s = - j I 1 * Xa s
5. Ток в обмотке статора 11 создает активное падение напряжения в активном сопротивлении фазы обмотки статора R1:
Ur = I 1* R 1
Геометрическая сумма всех перечисленных ЭДС, наведенных в обмотке статора, определяет напряжение на выходе синхронного генератора:
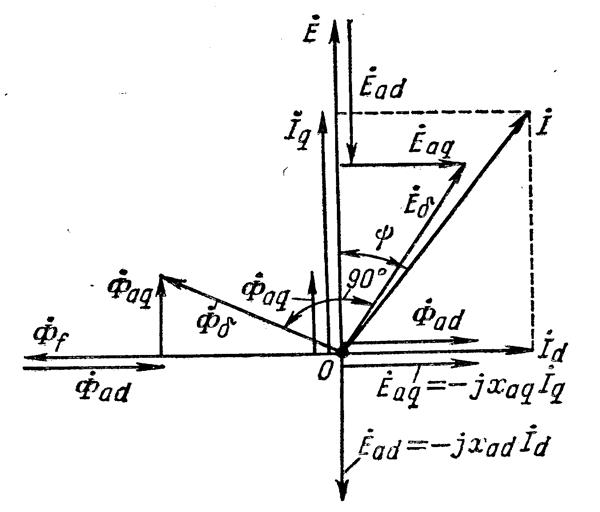
Полные векторные диаграммы. Явнополюсная машина. Напряжение фазы обмотки генератора равно сумме индуктируемых в этой обмотке ЭДС, минус падение напряжения в активном сопротивлении фазы обмотки. В связи с этим можно написать уравнение явнополюсного синхронного генератора:
U = Ef + Ead + Eaq + Ea s - r1*I
ЭДС реакции якоря и рассеивания можно выразить через соответствующие токи и индуктивные сопротивления:
Ead = - j Xad Id Eaq = - j Xaq Iq Ea s = - j Xa s I
Этому уравнению соответствует векторная диаграмма на рис 3.3. Неявнополюсная машина. Для этой машины Xd=Xq. Векторная диаграмма не отличается от предыдущей.
Рис. СМ.3.4. Векторная диаграмма явнополюсного СГ при активно-индуктивной нагрузке. Диаграмма Блонделя. Угол q между Ef < осью d ) и U. Тема 3. Синхронные машины. ЛЕКЦИЯ 4. ( 28.08.10. 22.09.11).
Характеристики СГ.
4.1. Характеристики холостого хода. ( ХХХ ). Характеристикой холостого хода называют зависимости: U = f(If) при I1 = 0 и f=fн.
Рис. СМ. 4.1. Характеристика холостого хода СГ.
Очевидно при I1 = 0 U = Ef. Характеристику зачастую строят в относительных единицах:
U* = U / Uн; If* = If / Ifн
Характеристики всех генераторов в относительных единицах до If*=1 довольно близки и называются НОРМАЛЬНЫМИ. Коэффициенты насыщения для турбогенераторов Кm = 1.2, для гидрогенераторов 1.06. Нормальная характеристика ХХХ приведена в таблице.
Таблица --------T------------------------------------------------------ If o.e. ¦ 0.50 1.00 1.50 2.00 2.50 3.00 3.50 -----+--------------------------------------------------------- E o. e. ¦ 0.58 1.00 1.21 1.33 1.40 1.46 1.51 ---------+-----------------------------------------------------
ЭМ.СM. 4.2. 07.03.2001 08.01.06. 20.07.09 23.09.10,
Нагрузочная характеристика. Нагрузочная характеристика определяет зависимость U=f(If) при I a=const, COS j=const и f=const и показвает как изменяется напряжение генератора U с изменением тока возбуждения If при условии постоянства тока нагрузки I1 и COS j. Нагрузочная характеристика и векторная диаграмма при R1=0, приведены на рис. 4.6. Практический интерес представляет нагрузочная характеристика при индуктивной нагрузке при COSj=0. АВС - реактивный треугольник или треугольник Потье. ОС - составляющая тока возбуждения - Is, индуцирующая ЭДС рассеивания Es, отрезок ВС.
Рис. СМ. 4.6. Нагрузочная характеристика СГ.
ЭМ.СM. 4.8. 07.03.2001 09.01.06.
Нагрузочную характеристику СГ можно построить из ХХХ и треугольника Потье передвигая треугольник Потье таким образом, чтобы его вершина В скользила по ХХХ. Тогда вершина А опишет нагрузочную характеристику.
Относительное повышение напряжения:
D U = (E f - Uн) / Uн * 100 = HA ’ / A ’K * 100
7.2. Построение нагрузочной характеристики. 1. Строим ХХХ. 2. Строим характеристику КЗ. 3. На характеристике КЗ откладываем ток I1н и определяем для него ток возбуждения If для случая U=0, точка А. Характеристика КЗ как раз и имеет U=0. Отрезок ОА определяет ток возбуждения If, необходимый для получения номинального тока I1н в обмотке статора при коротком замыкании. 4. Откладываем отрезок АС равный току возбуждения, создающему МДС продольной реакции якоря.
Ff 1 m = Fad 1 m * Kad = АС = KD
Ffme= wf / 2p * If Fad1m = m * Ö (2) / p * w1/p * Kоб * Ia Ffme = Fad1m
If = m * Ö (2) / p * w1 * Kоб / wf / p * Ia * Kad
5. Определяем ЭДС Е s обусловленную рассеиванием и соответствующую ей МДС, отрезок ОС. 6. Сроим треугольник короткого замыкания АВС. Треугольник Потье. 7. Проводим прямую параллельную оси If из точки U=U1н на оси U1. 8. Перемещаем треугольник АВС параллельно самому себе так, что бы точка В скользила по ХХХ. Точка А тогда опишет нагрузочную характеристику.
ЭМ.СM. 4.9. 07.03.2001 09.01.06.
9. Перенесем точку В треугольника АВС в такую точку B’ на ХХХ, чтобы его основание АВ находилось на расстоянии U1н от оси If и обозначим точки нового треугольника соответствующие точкам A, B, C в новом треугольнике как A’, B’, C’. В этом случае точка А’ будет находиться на нагрузочной характеристике. 10. Отложим на оси If тоску K, соответствующую точке A’. Соответствующий этой точке ток возбуждения создает напряжение на зажимах генератора равное Uн при токе нагрузке I1 = I1н. 11. Отложим на оси If точку D соответствующую току возбуждения точки C'. Тогда отрезок DK будет соответствовать току возбуждения эквивалентному реакции якоря Fad. 12. Находим точку H на ХХХ соответствующую точке К. Отрезок HK будет соответствовать ЭДС, наводимой в обмотке статора током возбуждения OK при ХХ, а точка A' напряжению на зажимах генератора при I1 = I1н. В этом случае отрезок DK=CA - составляющая тока, компенсирующая продольную реакцию якоря, а составляющая OD - должна индуцировать результирующую ЭДС величиной:
Е fо = U + Xа s * Ia = DC' + B' C' = DB'
Если X и Kad неизвестны то они могут быть определены из нагрузочной характеристики перемещением в точку A' отрезка O'A' и нахождении точки О'. Из точки О' строится прямая параллельная начальному отрезку прямого участка характеристики ХХ - OB и находится точка B' на пересечении этого отрезка с XXX. Опустив перпендикуляр из точки B' но ось If получим точки С' на прямой Uн и точка D - на прямой U=0. Треугольник A'B'C' - треугольник Потье. Отрезок C'B' в относительных единицах сопротивление рассеяния Хс. Отрезок С'А' в относительных единицах Fad в масштабе тока возбуждения.
ЭМ.СM. 4.10. 07.03.2001 09.01.06.
Тема 3. Синхронные машины. Л е к ц и я 5. (30.09.10).
Диаграмма Потье. При проектировании и эксплуатации синхронных машин возникает необходимость определения тока возбуждения, необходимого для обеспечения заданного режима работы ( U, I, COS j ). С этой целью для неявнополюсных генераторов пользуются диаграммой Потье, которая строится следующим образом. Заданы U, I1, COS j, R1 и X s, ХХХ и короткого замыкания. 1. На оси ординат откладываем номинальное напряжение машины Uн, и под углом j отстающий номинальный ток якоря (статора) I aн = Iн. 2. Определяем вектор суммарной ЭДС в якоре машины при нагрузке: E d = U + I a *R1 + j I a *X s где R1 активное сопротивление обмотки статора, Хs - индуктивное сопротивление рассеяния обмотки статора. Эта ЭДС индуцируется результирующим потоком Ф d и определяет при этом степень насыщения машины в данном режиме. 3. Строим ХХХ Ef = f(If). 4. Повернув E d на угол g получим точку М на оси ординат и по ней на ХХХ определяем необходимую ток возбуждения при нагрузке - Ifs, соответствующий полной МДС машины, необходимой для создания суммарного потока при нагрузке или суммарной ЭДС якоря машины при нагрузке Е d - точки M1 и D. Строим из точки 0 вектор тока возбуждения If s, опережающий вектор Е d на 90 градусов, точка D’. 5. На ХХХ по ЭДС рассеяния статора E s = I aн*X s, определяем ток возбуждения (МДС), необходимый для создания этой ЭДС -.отрезок 0С. 6. Строим характеристику КЗ. 7. Для тока Iан по характеристике КЗ определяем ток возбуждения необходимый для создания этого тока при коротком замыкании – отрезок 0A. 8. Строим треугольник Потье А E sС. 9. Определяем приведенный к обмотке возбуждения ток МДС реакции якоря Ifан’ (Ifан’ = Iaн * kid ) ( МДС реакции якоря Fad созданной током Iaн) в масштабе тока возбуждения - отрезок СА и откладываем его на направление тока Iа, от точки D (точка D соответствует суммарная МДС возбуждения при нагрузке), отрезок DD1. [Пиотровский с. 417], [Вольдек с. 669]. kid – коэффициент приведения тока якоря к току возбуждения. 10. Поскольку полная МДС машины при нагрузке Ffs равна суме МДС индуктора Ff и МДС реакции якоря Fad:
ЭМ.СM. 5.2. 03.03.08. 23.07.09 30.09. 10.
Ffs = Ff + Fad
Или в токах:
Ifs = If 1 + If ан'
Следовательно, ток возбуждения Ifн1 для получения U=Uн при токе I aн равен If1 = Ifs – If aн’, отрезок D10. 11. ЭДС Ef, создаваемая суммарным током возбуждения отстает на 90 град от тока If1. 12. Величина этой ЭДС - Ef определяется по точке N пересечения прямой, проведенной от точки 0 перпендикулярно току возбуждения при нагрузке If1, до пересечения с перпендикуляром к току Iа, проведенному из конца ЭДС Eδ, точка М, т.е. с продолжением направление вектора j*Iaн*X s. Вектор MN равен ЭДС реакции якоря Еad= Xad*Ia, где Хad - насыщенное значение индуктивного сопротивления продольной реакции якоря, а вектор ОN - равен насыщенному значению ЭДС Еf, индуцируемой током возбуждения Ff s. Эта ЭДС соответствует насыщенной величине Ef -точка N" определенной по спрямленной насыщенной характеристике ХХ проходящей через точку М1 , т.е. с коэффициентом насыщения соответствующим точке М1 ХХХ.
Рис. 5.1. Диаграмма Потье, совмещенная с ХХХ.
ЭМ.СM. 5.2.a. 02.02.2001. 12.03.2005. Тема 3. Синхронные машины.
Л Е К Ц И Я 6. (11.10.10.). Тема 3. Синхронные машины.
Л Е К Ц И Я 7. (16.10.09).(13.10.11) При невозбужденной машине Fdsum 0= Fad 0 = I 10 * w 1 e (7.36) Где Fad0 – МДС при якоря при невозбужденной машине на холостом ходе I10 – реактивный ток потребляемый якорем при холостом ходе, создающий номинальный магнитный поток и напряжение U при отсутствии возбуждение на ротора, т.е. при Ff=0 I1р = I10. Положив Fdsum = Fdsum0 получим: If * wf + I1 р * w1e = I10 * w1e Или
I1p * w1e = I10 * w1e - If * wf
ЭМ.СM. 7.9. 12.03.2007 29.07.09. 16.10.09. 13.10.11 Разделив на w1 e получим: I1p = I10 - If * wf / w1e = I10 - If’ (7.37) Изменяя возбуждение мы меняем реактивную составляющую тока статора и не меняем активную. Нагрузка Увеличим нагрузку P2. If = 0, Для данной нагрузке имеем Ia=P2/(m*U) и q> 0. I1 = √ ( Ia2 + Ip2) При токе возбуждения If= Iв’ реактивная мощность равная Q = m*U*[E f * COS( q ) - U] / Xd будет отличатся от 0 и COS j от 1. Для того чтобы получить COS j =1 необходимо увеличить Е f, а следовательно сделать ток возбуждения If1> Ifo. Новая точка соответствующая COS j=1 будет отстоять от оси Iв’ на ток I1a точка С1 и от точки Iв’, т.е.для получения COS j=1 необходимо повысить Е f , т.е. If. Изменяя возбуждение при этой нагрузке получим вторую кривую зависимости I = f(If). Семейство таких характеристик приведено на рис.7.6. Линия СД - линия постоянного COS j = 1 Линия АВ - представляет собой линию границы устойчивости.
Статическая устойчивость. Под статической устойчивостью СМ подразумевается ее способность сохранять неизменную скорость вращения при изменении внешнего момента. Допустим генератор работает при номинальной мощности Pн. Генератор может работать в точке 1 при q < 90° или в точке 2 при q> 90°. Допустим он работает в точке 1. Этой мощности соответствует номинальный угол qн. Допустим в результате случайного изменения угол q увеличился на dq. В этом случае увеличится мощность генератора и на dP превзойдет мощность приводного двигателя. В этом случае создастся дополнительная мощность dP и тормозной момент dM, который притормозит генератор и угол q уменьшится, т.е. работа генератора восстановится. Допустим, что генератор работает в точке 2 и угол q также случайно увеличился. В этом случае мощность генератора уменьшится, создастся дополнительный момент на валу генератора, который будет ускорять генератор в результате чего он начнет " проскальзывать" пока не попадет в точку 1 на другой полуволне характеристики.
ЭМ.СM. 7.11. 27.03.2001. . 23.03.2005.. 12.03.2007 Мощность dP называется СИНХРОНИЗИРУЮЩЕЙ. Этой мощности соответствует СИНХРОНИЗИРУЮЩИЙ момент, т.е. СГ обладает синхронизирующей способностью. Синхронизирующей способностью обладают не только СГ но и СД. Удельная синхронизирующая мощность:
Рс= dP/ d q = m * U * E / Xd COS( q) + m * U2 * (1/ Xq-1/ Xd) COS(2* q)
Зависимость удельной синхронизирующей мощности от угла нагрузки приведена на рис. 7.7. Таким образом, работа неявнополюсного СГ устойчива в области 0 < q < 90, эта область называется областью статической устойчивости СГ и неустойчива в области 90 < q < 180 т.е. режим работы синхронной машины статически устойчив, если dP/dq > 0. Из рисунка видно, что наибольшей синхронизирующей способностью СГ обладает при q=0. dPc = dP / d q - Коэффициент синхронизации. Устойчивая работа при Рс > 0.
Pис. 7.7. Угловая характеристика неявнополюсной СМ.
Тема 3. Синхронные машины. Лекция 9. (12.10.10) Синхронные двигатели. Векторная диаграмма СД. Векторную диаграмму для СД можно изобразить двумя способами приведенными на рис.9.2. - Способ 1 - как для генератора рассматривая ток I1 как отдаваемый в сеть. Проекция тока на U отрицательна, следовательно, активная мощность потребляется из сети. - Способ 2. - как для двигателя ток как потребляемый из сети. В этом случае направление Е и I1 поворачивают на 180 град. Проекция тока I1 на U положительна, что указывает на потребление активного тока из сети.
Рис. СМ. 9.2. Генератор в двигательном режиме. Векторная диаграмма.
ЭМ.СM. 9.3. 12.01.2001. 23.03.2005. 23.03.2008.
Диаграммы соответствуют перевозбужденному двигателю, отдающему реактивную энергию в сеть. На рис 9.2.а:
E = U + r * I + jXa * Id + jXq * Iq
На рис. 9.2. б Е с обратным знаком.
- E = U - r * I - jXd * Id - jXq * Iq
Диаграммы равноценны.
9.1.4. Рабочие характеристики СД. Рабочими характеристиками называются характеристики: I1 = f(P2), КПД = f(P2), COSQ = f(P2), P1 = f(З2). Характеристики приведены на рис.9.3.
Рис. 9.3. Рабочие характеристики СД.
Все виды потерь в СГ можно разделить на основные и добавочные. Основные потери. 1. Электрические потери в обмотке статора:
Pm 1 = m 1 * I 12 * R 1
R1 - сопротивление обмотки статора.
2. Потери в обмотке возбуждения: а. При работе от отдельного возбудителя:
Pf = I 2 * Rf
в. При работе от возбудителя на валу.
Pf = If 2 * Rf / η v
где η v - К.П.Д. - возбудителя.
ЭМ.СM. 9.4. 23.03.2008. 06.08.09.
3. Магнитные потери или потери в стали Pst = f(U) и определяемые из ХХХ. 4. Механические потери Pm. 5. Добавочные потери. 5.1. Добавочные потери в полюсных наконечниках Pdpn, определяемые из ХХХ. 5.2. Добавочные потери при нагрузке принимаются Pдоб для машин до 1000 кВт равными 0.5 % от P1 и 0.25 - 0.4 % lkz машин мощностью более 1000 кВт. 6. Суммарные потери:
Pсум = Pm1 + Pf+ Pst + Pm + Pdoб + Pst К.П.Д. = 1- Pсум / (Pн + Pсум )
Тема 3. Синхронные машины.
Л Е К Ц И Я 10. (06.08.09). Возбуждением. Вместо магнита на роторе установлена катушка возбуждения. Когтеобразный ротор позволяет иметь многополюсную машину с одной катушкой возбуждения. Используется как автомобильный генератор. 10.4. Синхронные реактивные двигатели. СГ спроектированный для работы без обмотки возбуждения и постоянных магнитов, называется РЕАКТИВНЫМ СГ. Синхронные реактивные двигатели имеют только реактивную составляющую момента.
Мр = m * p * U2 / 2 / w1 * SIN 2 q *( 1/Xq - 1/ Xd)
Эти машины имеют специальную конструкцию ротора, имеющую большое отношение Хd / Xq доходящее до 5-6. Это позволяет повысить момент, развиваемый этими двигателями.
ЭМ.СM. 10.3. 12.01.2001. 26.03.2005.
Рассмотрим величину мощности реактивного СГ в относительных единицах.
P* = P/S = P / (m U н I н ) = U2 / 2 * (1/Xq* - 1/Xd*) * SIN(2* q )
Положим, что U*=1, Xd* =1.6, Xq*=0.35. Тогда Pm* = 1.12. Учитывая, что перегрузочная способность двигателя должна составлять Км=1, т.е. величина полезной мощности может составлять около половины. Машина в этом режиме потребляет реактивный ток. На холостом ходу этот ток равен:
I = U / Xd
Например, при U*=1, Xd* =1, 6 получим I* = 0, 631 от номинального. Векторная диаграмма такой машины приведена на рис. 22.
Гистерезисные двигатели. Работа этих двигателей основана на действии гистерезисного момента. Под действием магнитного поля статора ротор намагничивается. Если поле начинает вращаться то под действием гистерезиса, магнитного запаздывания, магнитное поле статора и ротора будут направлены под углом g друг к другу. Благодаря этому углу и создается момент. Этот угол зависит от ширины петли гистерезиса, чем шире петля, тем больше угол g, тем больше момент. Применение обычной стали для изготовления ротора не обеспечивает гистерезисного момента достаточной величины. Только магнитно-твердые материалы, например такие, как викаллой, дают возможность получить большой гистерезисный момент. Роторы гистерезисных двигателей обычно делают сборными. Магнитно-твердая часть выполняется в виде шихтованного или массивного кольца /, размещенного на втулке 2 (рис. 23.8, б). Последняя жестко посажена на вал 3.
Ротор таких двигателей делают не шихтованным и в нем наводятся вихревые токи также создающие момент. Моменты суммируются. ЭМ.СM. 10.4. 12.01.2001. 26.03.2005.
Гистерезисные двигатели могут работать как в синхронном, так и в асинхронном режимах, но асинхронный режим неэкономичен. Достоинства этих двигателей: 1. Простота конструкции. 2. Бесшумность и надежность. 3. Большой пусковой момент. 4. Сравнительно высокий КПД. 5. Малый пусковой ток. Недостатки: 1. Малый COSj = 0.4 -0.5.
Где
L d = L d g + L d 0 (15)
ЭМ.СM. 10.11. 12.01.2001. 14.01.2007.
где L d g - магнитная проводимость части зазора между полюсом статора и ротора при взаимном перекрытии полюсов xsr, L d 0 – магнитная проводимость между полюсами статора и ротора обуславливающая магнитные потоки рассеяния, не проходящие через зазор d. Если зависимость L g d = f ( q ) при d = f ( q ) = const может быть определена достаточно четко, то для определения зависимости L d 0 = f ( q ) надо иметь картину магнитного поля в межполюсном пространстве. Расчет этой проводимости можно сделать либо численно, моделируя магнитное поле двигателя между полюсами, либо аналитически согласно методике предложенной в [5] и приведенной в [8]. Момент на валу, создаваемый полюсом статора:
M = dW/d j = dW/dt * dt/d j = i2 /2*dL / dt / w 2 = i*ev / 2 / w 2 (16)
Где W – магнитная энергия в воздушном зазоре магнитной системы полюса. Поскольку вентильный двигатель имеет дискретный режим работы, поэтому анализировать его работу будем, разбив время его полного оборота на ряд участков. Упрощенное распределение момента, развиваемого двигателем с геометрией, приведенной на рисунке 1 и детально описанной в [c. 3], [3], [4] при постоянной величине тока в обмотке при повороте ротора приведено на рисунке 2.
Участок работы 2 обмотки полюса имеет две ступени: 2а – обмотка подключена к одной полярности, назовем ее положительной и ступень 2b обмотка подключена к обратной полярности для гашения поля полюса. Рассмотрим работу машины на первом участке от совпадения оси полюса статора с осью q, проходящей по средине между полюсами ротора до момента начала перекрытия полюсов. Назовем ось, на которой находится середина полюсов ротора при начале перекрытия полюсов ротора и статора остью z, а угол между осью q и z углом jz.
ЭМ.СM. 10.12. 12.01.2001. 14.01.2007.
Расчет и анализ результатов при работе двигателя в режиме с перекрытием полюсов, т.е. от оси z до оси q приведен в [1], [2]. Рассмотрим работу машины на первом участке от оси q до оси z. Для анализа двигателя в режиме работы с положением ротора от оси q до оси z необходимо иметь проводимости воздушного зазора на это отрезке положения осей двигателя. Используем для нашего анализа результаты расчета проводимости воздушного зазора, приведенные в [ ]. Рассмотрим процессы, происходящие в двигателе при включении обмоток на втором участке, когда ось статора расположена между осями q и z. Работа на этом участке характеризуется: 1. Большой величиной воздушного зазора, а, следовательно, малой магнитной проводимостью системы, Ld = (6 – 10) Lq (7.216). 2. Отсутствием насыщения магнитной системы вследствие ее малой проводимости. 3. Малой индуктивностью обмотки обусловленной малой магнитной проводимостью воздушного зазора, Ld = (6-10) Lq – (7.216). 4. Малой величиной эквивалентного сопротивления определяющего ЭДС вращения Rv. Rvd = (3 – 5 ) Rvq – (3.36). 5. Меньшей постоянной времени электромагнитного процесса Т = L / Rs. а, следовательно, большой скоростью нарастания тока, Td = 1.1 – 1.3 Tq – (1.18). 6. Большей величиной установившегося тока Iq / Id = 2.5 – 3.5. Таким образом, при включении обмотки двигателя в момент времени предшествующий началу перекрытия полюсов, т.е при угле включения b < jz, рост тока определяются параметрами магнитной системы на участке 1 между осями q и z, характеризующимися малой индуктивностью и ЭДС вращения, а также уменьшенной постоянной времени процесса. В результате этого происходит быстрый рост тока, который к моменту перекрытия полюсов превосходит установившийся ток на втором участке, т.е. при перекрытии полюсов, в 2, 5 – 3, 5 раза. А поскольку поток полюса до момента перекрытия полюсов соответствовал потоку рассеяния, т.е. был небольшим, насыщение полюса отсутствовало, в момент начала перекрытия полюсов вся МДС обмотки расходуется на создание потока в воздушном зазоре, что приводит к резкому возрастанию индукции на кромке перекрывающихся полюсов. Это приводит к увеличению насыщения кромки полюсов и увеличенным потерям в стали, аналогичным поверхностным потерям в зубцах машин переменного тока. Но с н началом перекрытия плюсов резко возрастает эквивалентное сопротивление цепи Rv и поскольку ток не может сделать скачка, ЭДС вращения ev. В результате этого процесса ЭДС вращения ev, может превысить напряжение U, приложенное на обмотку.
ЭМ.СM. 10.13. 12.01.2001. 14.01.2007.
На первом участке работы машины мы имеем большую величину магнитного зазора между статором и ротором, а, следовательно, не насыщенную магнитную систему двигателя. Этот ток является начальным током i21 = Ik для второго участка работы. Рассмотрим этот участок. Высокие моментные характеристики таких двигателей могут быть получены только при достаточно высоких индукциях в магнитных системах, т.е. при высоких насыщениях. Рассмотрим результаты решения этого уравнения при различных начальных углах включения обмоток. Как видно из рисунка 2 предпочтительным участком начала работы двигателя является участок 1 от совпадения осей полюса статора с осью, проходящей по центру между полюсами ротора, т.е. с осью q до начала перекрытия плюсов, назовем ее осью g. Характеристики двигателя, начинающего свою работу от оси g рассмотрены в [1], [2], [3]. Ниже рассмотрим работу двигателя начинающуюся со второй границы участка 2 по рисунку 2, а именно с оси q. Для анализа двигателя в режиме работы с положением ротора от оси q до оси g необходимо иметь проводимости воздушного зазора на этом отрезке положений осей двигателя. Используем для нашего анализа результаты расчета проводимости воздушного зазора, приведенные в [ ]. Согласно (32) установившийся ток полюса определяется суммарным сопротивление обмотки R1 и эквивалентным сопротивлением вращения Rv = dL/dt Для первого участка работы с 0< j < jz, как видно из таблицы1, в результате расчета для w1=14 получено для первого участка Rv1=0.15 и Im1 =685 и для второго участка Rv2=0.502 и Im2=224 т.е. для первого участка эквивалентное сопротивление ниже, а установившийся ток выше, чем для второго участка. В результате этого, ток обмотки к началу перекрытия полюсов больше установившегося тока для второго участке Ig > I2m что приводит к такому соотношению, когда ЭДС вращения в начальный момент перекрытия полюсов больше напряжения на обмотке. Поскольку ЭДС вращения определяет момент двигателя, последний на начальном участке перекрытия полюсов резко возрастает. В результате этого максимальная мощность развиваемый парой полюсов возрастает с 13 кВт [ ] приблизительно до 25.8 кВт, т.е. почти в два раза.
ЭМ.СM. 10.14. 12.01.2001. 14.01.2007.
При этом индукция на начальном участке перекрывающихся полюсов возрастает до 2.82 Тл. Зависимость момента двигателя от угла поворота ротора при угле включения j=0, ось полюсов статора совпадает с осью проходящей по средине между полюсов ротора ( ось q ) и при числе витков обмотки статора W1 = 14, приведена на рисунке 3, а ток на рисунке 4. Выводы. Рациональны выбором геометрии двигателя и правильным выбором момента включения можно создать для начальной стадии работы полюса до начала перекрытия полюсов, режим работы аналогичные режиму работы двигателя с накопителями энергии, тем самым значительно повысить
10.9. Шаговые двигатели. Шаговые двигатели или импульсные двигатели используются в электроприводах с программным управлением. Они могут быть как с активным, так и с реактивным ротором. Существует большое количество различных конструкция и схем шаговых двигателей.
Шаговые, или импульсные двигатели питаются импульсами электрической энергии, а ротор в зависимости от полярности импульсов перемещается по часовой стрелке или против часовой стрелки на определенный угол-шаг. Основная задача их отрабатывать электрические импульсы, преобразуя электрические сигналы в угловые перемещения.
ЭМ.СM. 10.15. 12.01.2001. 14.01.2007.
Для управления шаговыми двигателями используются коммутаторы на полупроводниковых элементах, формирующие импульсы, которые подаются на фазы обмотки шагового двигателя. Число фаз выбирается равным четырем или шести. Шаг двигателя может быть от 180 до 1° В специальных установках шаг может быть несколько минут. Шаговые двигатели могут быть выполнены на основе конструкции любых синхронных двигателей. Так как основным требованием к шаговым двигателям является точность отработки сигналов и высокая частота импульсов, предпочтительны конструкции шагового двигателя, выполненного на базе реактивных и индукторных синхронных машин. Шаговые двигатели характеризуются предельной частотой импульсов, которые двигатель обрабатывает без пропуска шага. Пусковые свойства шаговых двигателей характеризуются частотой приемистости — максимальной частотой импульсов, при которой возможен пуск без потери шагов. В зависимости от типа шагового двигателя и нагрузки частота приемистости колеблется от 10 до 104 Гц. Работать шаговые двигатели могут от одно или двух полярных импульсов. Один из важнейших характеристик шаговых двигателей является частота приемистости - максимальная частота, при которой ротор способен втягиваться в синхронизм при трогании с места. Эта частота при номинальной нагрузке составляет 1000-1500 Гц. Ротор шагового двигателя, следуя за потоком будет в некоторые моменты отставать от него на некоторый угол, называемый углом статической ошибки. Так как для того чтобы определить какую из обмоток двигателя необходимо включать, в момент коммутации необходимо знать положение ротора в пространстве. Для определения этого положения применяются датчик положения, который и управляет коммутацией обмоток, подавая сигналы на коммутирующие устройства. Математическое описание процессов преобразования энергии при импульсном питании осуществляется по уравнениям электромеханического преобразования энергии и их видоизменениям, когда форма напряжения— импульсная.
ЭМ.СM. 8.1. 27.03.2001. 06.07.13.
Тема 3. Синхронные машины.
Л Е К Ц И Я 8. (06.07.03) Внезапная нагрузка СГ. Допустим СГ подключен к сети и работает ненагруженным. Увеличим момент на валу приводного двигателя до величины М1. Вследствие вращающихся масс в первый момент скорость генератора не изменится, не изменится угол Teta и мощность отдаваемая генератором в сеть. Однако под действием избыточного момента ротор СГ приобретет ускорение равное a=J dW/dt, где J момент инерции системы приводной двигатель - СГ. Под действием этого ускорения ротор СГ начнет обгонять вращающееся магнитное поле статора, создавая угол нагрузки Teta и мощность, отдаваемую СГ в сеть. При достижении угла q1, соответствующего моменту М1 ротор не прекратит обгон поля статора, а под действием сил инерции буде продолжать его обгонять. В результате этого создастся угол нагрузки q > q1 и момент М> M1, который начнет тормозить ротор и уменьшать угол q. Достигнув угла q1, ротор опять не остановится в своем торможении, а будет уменьшать угол q до появления момента М< M1. Иными словами возникнут колебания ротора, относительно среднего значения угла q1. Если бы эти колебания не сопровождались потерями энергии, то они были бы незатухающими. При равномерном вращении ротора синхронно с полем в сердечнике ротора и в пусковой короткозамкнутой обмотке не индуцируются ЭДС. Однако при отличии в скорости ротора и магнитного поля в сердечнике ротора и в успокоительной обмотке будут индуцироваться ЭДС, вызывающие токи, а, следовательно, потери в сердечнике и в успокоительной обмотке. Эти потери вызовут " успокаивающее" действие на ротор и затухание возникших колебаний. Демпфирование возникших колебаний ротора, является одной из назначений успокоительной или демпферной обмотки на роторе СМ. Частота возникших колебаний называется собственной. Аналогичные колебания при изменении нагрузки возникают и в СД. Возникновение колебаний ротора при изменении нагрузки характерная черта СМ.
ЭМ.СM. 8.2. 12.01.2001. СМ.1.34а. 12.10.98.
Добавочные материалы.
Шаговые двигатели или импульсные двигатели используются в электроприводах с программным управлением. Они могут быть как с активным, так и с реактивным ротором. Существует большое количество различных конструкция и схем шаговых двигателей. Обмотки шаговых двигателей обычно располагают на статоре. Рассмотрим работу шагового двигателя с шестью полюсами на статоре и двумя на роторе. При включении обмоток полюсов 1 - 1' полюса ротора располагается по оси этих полюсов. При включении обмоток полюсов 1 - 1' и 2 - 2' полюса ротора расположатся посредине этих полюсов, т.е. повернется на 30 гр. При включении обмоток полюсов 2 - 2' полюса ротора располагается по оси этих полюсов, т.е. повернется на 60 гр. При включении обмоток полюсов 2 - 2' и 3 - 3' полюса ротора расположатся посредине этих полюсов, т.е. повернется на 90 гр. При включении обмоток полюсов 3 - 3' полюса ротора располагается по оси этих полюсов, т.е. повернется на 90 гр. Схема коммутации такого двигателя 1 - 12 - 2 - 23 - 3 - 31...и называется раздельно-совместной и имеет шаг 30 гр. Если в этом двигателе применить коммутацию раздельную коммутацию 1 - 2 - 3 - 1 - 2 - 3..., то шаг будет 60 гр. Шаг коммутации определяется из выражения:
Ak= 360/( 2 p m k )
где: р - число полюсов ротора; m - число фаз управления; К - коэффициент зависящий от вида коммутации, при раздельно-совместной коммутации К=2, при раздельной К=1. Работать шаговые двигатели могут от одно или двух полярных импульсов. Один из важнейших характеристик шаговых двигателей является частота приемистости - максимальная частота, при которой ротор способен втягиваться в синхронизм при трогании с места. Эта частота при номинальной нагрузке составляет 1000-1500 Гц. Ротор шагового двигателя, следуя за потоком будет в некоторые моменты отставать от него на некоторый угол, называемый углом статической ошибки. Так как для того чтобы определить какую из обмоток двигателя необходимо включать в момент коммутации необходимо знать положение ротора в пространстве. Для определения этого положения применяются датчик положения, который и управляет коммутацией обмоток, подавая сигналы на коммутирующие устройства.
Введение. Электрические машины. 1. Общие положения. Все электрические машины представляют собой магнитные цепи разной сложности и с разными особенностями. К этим особенностям относятся: 1. Нелинейность магнитной характеристики системы, вызванная насыщением. 2. Несинусоидальное распределение индукции по сечению цепи приводящее к появлению несинусоидальных напряжений и токов. 3. Распределенные в пространстве обмотки. 4. Укороченные или удлиненные шаги обмоток. 5. Скосы пазов. 6. Многообмоточные системы. 7. Подвижные системы. Как известно расчет любой магнитной цепи сводится к расчету эквивалентной электрической цепи. Расчет магнитной цепи электрической машины не исключение. Расчет такой сложной цепи, возможно провести как пространственную задачу, решением систем алгебраических или дифференциальных уравнений. Но такой путь очень сложен. Для упрощения расчета схему магнитной цепи значительно упрощают, а отличие реальной схемы от принятой учитывают введением поправочных коэффициентов. В частности: 1. Нелинейность магнитной характеристики системы, вызванную насыщением учитывают введением различных эмпирических коэффициентов насыщения. 2. Не синусоидальность распределения индукции по сечению цепи приводящее к появлению несинусоидальных напряжений и токов учитывают разложением кривых индукции, напряжение и токов в ряд Фурье и расчетом двигателя для основной гармоники поля с учетом высших гармонических различными эмпирическими коэффициентами. 3. Распределенные в пространстве обмотки введением коэффициента распределения. 4. Укороченные или удлиненные шаги обмоток введением коэффициента укорочения. 5. Скосы пазов, введением коэффициента скоса. 6. Многообмоточные системы введением взаимных индуктивностей. 7. Подвижные системы введением ЭДС вращения и т.д. Зная рассчитываемую конструкцию электрической машины легко можно определить какие поправочные коэффициенты необходимо вводить в те или иные расчеты. ЭМ-СM-C1-13.doc Отредактированный вариант ЭМ-СМ-C1-10.doc Электрические машины. Тема 3. Синхронные машины Вариант: 14.10.09. 21.08.10. 08.09.11. 22.09.11 13.10.11.06.09.13.09.09.13 ========================================================== |
Последнее изменение этой страницы: 2019-04-09; Просмотров: 354; Нарушение авторского права страницы
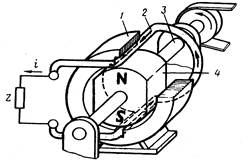 Во внутренней полости сердечника статора расположена вращающаяся часть машины — ротор , представляющий собой постоянный магнит или электромагнит 4 с полюсами N и S , закрепленный на валу 3 .
Во внутренней полости сердечника статора расположена вращающаяся часть машины — ротор , представляющий собой постоянный магнит или электромагнит 4 с полюсами N и S , закрепленный на валу 3 . 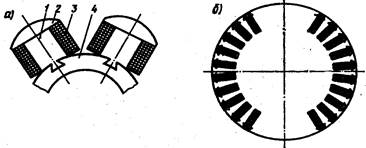

 СМ. 3.11. 05.01.06. 22.02.06. 25.02.2006. 11.02.07.
СМ. 3.11. 05.01.06. 22.02.06. 25.02.2006. 11.02.07. 


 Диаграмма Потье приведена на рис. 5.1.
Диаграмма Потье приведена на рис. 5.1.



 Как видно из рисунка мы имеем 4 участка работы полюса, по два на различное направление вращения. Первый при отсутствии перекрытия плюсов, а, следовательно, с малой величиной ЭДС вращения и низким моментом и второй, при перекрытии полюсов и с высоким моментом.
Как видно из рисунка мы имеем 4 участка работы полюса, по два на различное направление вращения. Первый при отсутствии перекрытия плюсов, а, следовательно, с малой величиной ЭДС вращения и низким моментом и второй, при перекрытии полюсов и с высоким моментом.
 Обмотки шаговых двигателей обычно располагают на статоре, рис. 1.
Обмотки шаговых двигателей обычно располагают на статоре, рис. 1.