
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Ускорение точки при задании ее движения координатным ⇐ ПредыдущаяСтр 10 из 10
Способом
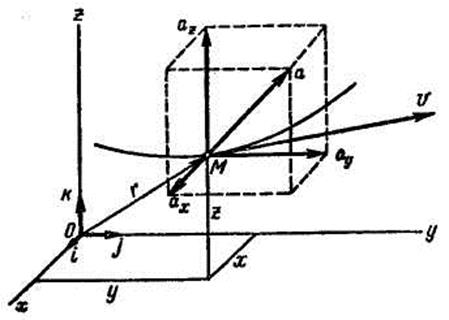
Определим модуль и направление ускорения точки по уравнениям ее движения в декартовых координатах. Пусть заданы уравнения движения точки (рис. 2.14)
Рис. 2.14
Проекции ускорения на оси координат определяются по формулам:
Так как первые производные от координат точки по времени равны проекциям скорости на соответствующие оси, т.е.
то проекции ускорения точки можно представить в другом виде:
Следовательно, проекции ускорения точки на неподвижные оси декартовых координат равны вторым производным от соответствующих координат точки по времени или первым производным по времени от проекций скорости на соответствующие оси. После вычисления проекций ускорения на координатные оси можно определить модуль и направление ускорения точки:
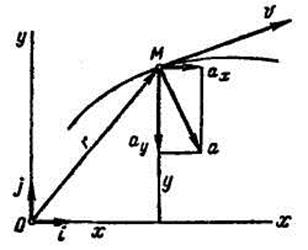
Движение точки в плоскости хОу задается двумя уравнениями движения:
Рис. 2.15
Модуль и направление ускорения точки в этом случае (рис. 2.15) определяются так:
Прямолинейное движение точки задается одним уравнением x = f(t). В этом случае модуль ускорения равен абсолютному значению его проекции на ось х, т. е.
Ускорение направлено в сторону оси х, если
Определение радиуса кривизны траектории при координатном способе задания движения Касательное ускорение точки возможно лишь при неравномерном движении точки и характеризует изменение модуля скорости. В том случае, если требуется определить касательное и нормальное ускорения движения точки, которое задано уравнениями движения
Согласно формуле
или
где знак плюс, полученный в ответе после вычисления дроби соответствует ускоренному движению точки, а знак минус - замедленному. С другой стороны, модуль ускорения точки равен
тогда
Зная, что
находим радиус кривизны кривой по формуле
Классификация движения точки по ускорениям Ее движения
Равномерное движение. Выясним зависимость характера движения точки от значений ее нормального и касательного ускорений. С л у ч а й I: С л у ч а й II:
Рис. 2.16
Если Уравнение равномерного движения точки имеет вид
Постоянную скорость равномерного движения точки можно определить из уравнения движения
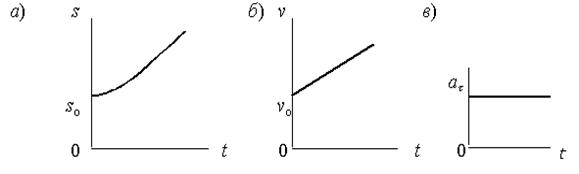
Графики равномерного движения и его скорости представлены на рис. 2.17.
Рис. 2.17
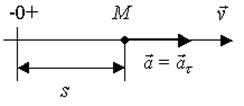
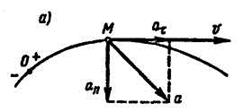
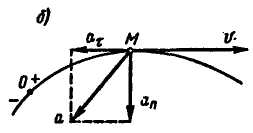
Равнопеременное движение. При равнопеременном движении алгебраическое значение касательного ускорения остается во все время движения неизменным С л у ч а й III:
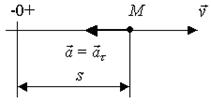
а) Ускоренное движение б) Замедленное движение
Рис. 2.18 С л у ч а й IV:
Рис. 2.19
Графическое изображение ускорения точки при равнопеременном криволинейном движении представлено на рисунке 2.19, а ускоренного движения, рис. 2.19, б – замедленного движения. Уравнение равнопеременного движения точки имеет вид
Если
Рис. 2.20 Графики замедленного движения, скорости и касательного ускорения представлены на рис. 2.21.
Рис. 2.21
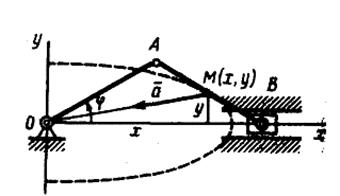
Задача 2.2. Определить траекторию, скорость и ускорение точки М шатуна кривошипно-ползунного механизма (рис. 2.22), если ОА=АВ=2b, а угол
Рис. 2.22
Решение. Начинаем с определения уравнений движения точки М. Проводя оси и обозначая координаты точки М в произвольном положении через х и у, находим:
Заменяя
Для определения траектории точки М представим уравнения движения в виде:
Возводя эти равенства в квадрат и складывая, получим
Итак, траектория точки М — эллипс с полуосями 3b и b. Теперь находим скорость точки М:
Скорость оказывается величиной переменной, изменяющейся с течением времени в пределах от Определяем проекции ускорения точки М:
отсюда
где r — длина радиуса-вектора, проведенного из центра О до точки М. Следовательно, модуль ускорения точки меняется пропорционально ее расстоянию от центра эллипса. Направление ускорения
Ускорение точки М все время направлено вдоль МО к центру эллипса.
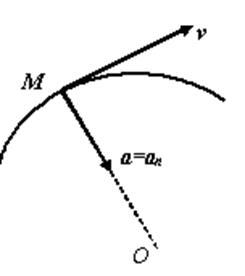
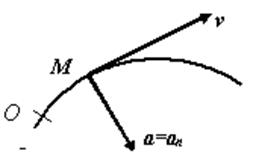
Задача 2.3. Локомотив движется равномерно по закруглению радиусом R = 600 м, причем ускорение его центра тяжести равно а = 0, 26 м/с2. Определить скорость центра тяжести локомотива. Решение. По условию задачи необходимо определить скорость центра тяжести локомотива, т.е. задача сводится к кинематике точки. Движение точки задано естественным способом, так как известна траектория движения. Покажем на рис. 2.23 траекторию – дугу радиусом R, на ней выберем начало и положительное направление отсчета дуговой координаты s.
Рис. 2.23
При естественном способе задания движения ускорение точки равно
В случае равномерного движения
где Окончательно имеем
На рис. 2.23 в произвольном положении точки изображены ее вектор скорости, направленный в сторону возрастания дуговой координаты, и ускорение, равное нормальному ускорению и направленному к центру кривизны траектории.
Задача 2.4. По заданным уравнениям движения точки М установить вид ее траектории и для момента времени
Рис. 2.24
где х и у в сантиметрах, t – в секундах. Решение. Параметрическим представлением траектории является сам закон движения. Уравнение траектории в координатной форме получаем, исключая из закона движения время:
Получили
Таблица 2.1
Траектория построена на рис. 2.24, на ней стрелкой показано направление движения точки из начального положения при Дифференцируя (2.5) по времени, находим проекции скорости точки на оси координат х, у:
При По найденным проекциям определяем модуль скорости
Дифференцируя (2.6), находим проекции вектора ускорения
При По найденным проекциям определяем модуль ускорения
Определение касательного ускорения при
Определение нормального ускорения при
Определение радиуса кривизны при
Результаты вычислений для заданного момента времени
Таблица 2.2
На рис. 2.24 показано положение точки М в заданный момент времени. Векторы скорости и ускорения точки М построены в масштабе по их проекциям на оси координат: Радиус кривизны проведен в сторону вогнутости траектории перпендикулярно к вектору скорости – по направлению
Таблица 2.3 |
|||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-04-09; Просмотров: 409; Нарушение авторского права страницы

 .
.




 , и противоположно оси х, если
, и противоположно оси х, если  .
. , то сначала определяют модули скорости и ускорения точки:
, то сначала определяют модули скорости и ускорения точки: 
 ,
, 
 ,
, 
 Если в течение некоторого промежутка времени нормальное и касательное ускорения точки равны нулю, то в течение этого промежутка не изменяются ни направление, ни модуль скорости, т.е. точка движется равномерно-прямолинейно и ее ускорение равно нулю.
Если в течение некоторого промежутка времени нормальное и касательное ускорения точки равны нулю, то в течение этого промежутка не изменяются ни направление, ни модуль скорости, т.е. точка движется равномерно-прямолинейно и ее ускорение равно нулю. . Если в течение некоторого промежутка времени не равно нулю нормальное ускорение и равно нулю касательное ускорение, то происходит изменение направления скорости без изменения ее модуля, т. е. точка движется равномерно-криволинейно и модуль ее ускорения (рис. 2.16)
. Если в течение некоторого промежутка времени не равно нулю нормальное ускорение и равно нулю касательное ускорение, то происходит изменение направления скорости без изменения ее модуля, т. е. точка движется равномерно-криволинейно и модуль ее ускорения (рис. 2.16) .
.
 в некоторый момент времени, то точка не движется равномерно, а в этот момент времени модуль ее скорости имеет максимум, или минимум.
в некоторый момент времени, то точка не движется равномерно, а в этот момент времени модуль ее скорости имеет максимум, или минимум. .
. .
.
 .
. . Если в течение некоторого промежутка времени равно нулю нормальное ускорение точки и не равно нулю касательное, то направление скорости не изменяется, а изменяется ее модуль, т.е. точка движется по прямой неравномерно. Модуль ускорения точки в этом случае (рис. 2.18)
. Если в течение некоторого промежутка времени равно нулю нормальное ускорение точки и не равно нулю касательное, то направление скорости не изменяется, а изменяется ее модуль, т.е. точка движется по прямой неравномерно. Модуль ускорения точки в этом случае (рис. 2.18)
 . Если в течение некоторого промежутка времени ни нормальное, ни касательное ускорения точки не равны нулю, то изменяется как направление, так и модуль ее скорости, т. е. точка совершает неравномерно-криволинейное движение. Модуль ускорения точки
. Если в течение некоторого промежутка времени ни нормальное, ни касательное ускорения точки не равны нулю, то изменяется как направление, так и модуль ее скорости, т. е. точка совершает неравномерно-криволинейное движение. Модуль ускорения точки
 , то при ускоренном движении
, то при ускоренном движении  , а при замедленном движении
, а при замедленном движении  . Формула скорости равнопеременного движения точки имеет вид
. Формула скорости равнопеременного движения точки имеет вид .
.
 – ускоренное движение
– ускоренное движение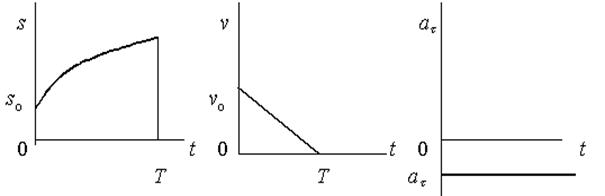
 –- замедленное движение
–- замедленное движение при вращении кривошипа растет пропорционально времени
при вращении кривошипа растет пропорционально времени  .
.
 .
.  .
. .
. .
.
 .
. до
до  .
. 
 ,
,  определяем по направляющим косинусам:
определяем по направляющим косинусам:  .
.
 .
. . Тогда
. Тогда  , но
, но - радиус кривизны траектории в данной ее точке. В нашем случае
- радиус кривизны траектории в данной ее точке. В нашем случае  = 600 м в любой точке траектории.
= 600 м в любой точке траектории. м/с.
м/с. , найти положение точки на траектории, ее скорость, касательное, нормальное и полное ускорения, а также радиус кривизны траектории (рис. 2.24):
, найти положение точки на траектории, ее скорость, касательное, нормальное и полное ускорения, а также радиус кривизны траектории (рис. 2.24): 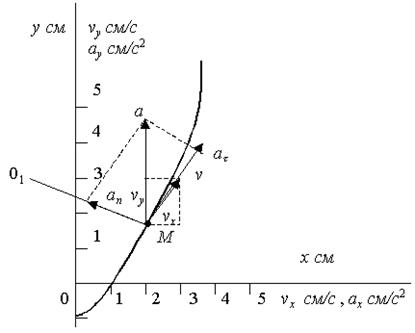
 , (2.5)
, (2.5) .
. , то есть траекторией точки является парабола. Для построения траектории рассчитаем по уравнениям координаты точек параболы, отвечающие нескольким моментам времени. Результаты расчетов приведены в табл. 2.1.
, то есть траекторией точки является парабола. Для построения траектории рассчитаем по уравнениям координаты точек параболы, отвечающие нескольким моментам времени. Результаты расчетов приведены в табл. 2.1. с координатами
с координатами  .
. . (2.6)
. (2.6)
 .
. .
. .
. .
. .
.
 .
. .
. .
. , там же показаны касательное и нормальное ускорения. Совпадение величин
, там же показаны касательное и нормальное ускорения. Совпадение величин  и
и  , найденных из чертежа, с их значениями, полученными аналитически, служит контролем правильности решения.
, найденных из чертежа, с их значениями, полученными аналитически, служит контролем правильности решения.