|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ЭНЕРГЕТИЧЕСКОЙ ЭЛЕКТРОНИКИСтр 1 из 49Следующая ⇒
Основы энергетической электроники
Учебное пособие
Йошкар-Ола 2003
Министерство образования Российской Федерации
МАРИЙСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
И.И. Попов
ОСНОВЫ ЭНЕРГЕТИЧЕСКОЙ ЭЛЕКТРОНИКИ
Рекомендовано УМО по образованию в области энергетики и электротехники в качестве учебного пособия для студентов электроэнергетических специальностей высших учебных заведений
Йошкар-Ола 2003
УДК 62 50 + 681. 3/075 Рецензенты: профессор Марийского государственного технического университета, д.т.н. А. Н. Соболев профессор Марийского государственного университета, д. ф.-м.н. А. А. Косов Сравнительная характеристика полупроводниковых вентилей Быстрое развитие микроэлектроники оказывает столь большое влияние на силовую электронику, что можно говорить о качественно новой ступени развития последней. Современное состояние силовой электроники зависит от уровня развития силовых вентилей и устройств информационной электроники, используемых непосредственно в преобразователях. В течение почти 70 лет находили применение вакуумные и газоразрядные вентили, а также механические и селеновые выпрямители. В настоящее время эти вентили почти полностью заменены приборами на основе монокристаллического кремния, такими как кремниевые диоды, тиристоры, симисторы, биполярные и полевые силовые переключающие транзисторы. Силовые полупроводниковые приборы позволяют удовлетворять самые разнообразные запросы потребителей в отношении напряжения и тока. На их основе созданы выпрямители весьма большой мощности для электрохимии и для питания регулируемых двигателей постоянного тока, а также инверторы для установок гарантированного питания, преобразователи для индукционного нагрева и другие преобразователи с высокими динамическими показателями и КПД при меньшей массе и объеме. Полупроводниковые вентили являются основными приборами энергетической электроники. Их свойства особенно подходят для специальных областей применения. Важнейшие параметры полупроводниковых вентилей даны в таблице 2.1. Таблица 2.1 Полупроводниковые вентили энергетической электроники
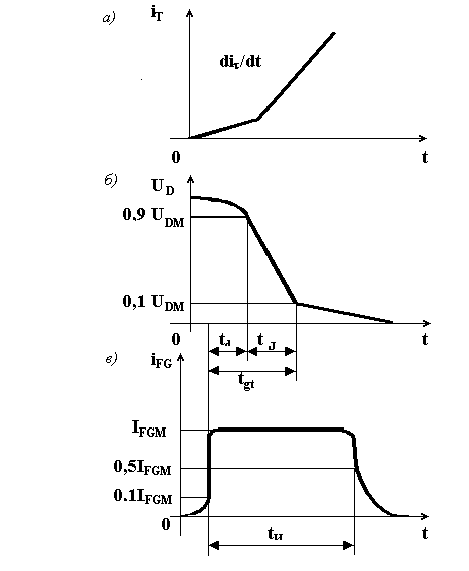
Процессы при переключениях. При переходе от проводящего состояния вентиля к запертому или обратно возрастание или снижение количества носителей заряда в слоях кремниевой шайбы, образующих структуру вентиля, происходит не скачкообразно. Поэтому полупроводниковые вентили обладают некоторой инерционностью. При быстром включении диода (скорость нарастания тока более 1 А/мкс) возникает увеличенное прямое падение напряжения (10 В и более), которое затем снижается в течение времени включения (обычно менее 1 мкс). Это время существенно для быстродействующих диодов, например, используемых для шунтирования цепи нагрузки или управляемых вентилей ("нулевые" или обратные диоды). При быстром переключении диода из проводящего состояния в запертое через него протекает значительный обратный ток, длительность импульса этого тока определяет время выключения диода (или время восстановления запирающих свойств), которое для обычных диодов, работающих при частоте сети, обычно не превышает 10 мкс, а для быстро включающихся диодов - 1 мкс. Амплитуда этого тока, обусловленного эффектом накопления носителей заряда, может превосходить прямой анодный ток. Этот ток тем больше, чем выше скорость спада прямого тока. Накопленный заряд и, соответственно, время выключения диода также растут с увеличением скорости спада прямого тока. Названные факторы влияют на параметры устройств защиты вентилей от импульсных периодических перенапряжении (RC-цепочки), обусловленных быстрыми изменениями обратного тока во время запирания и наличием индуктивностей в цепи вентиля. Изменение тока и напряжения на вентиле при его включении показаны на рис. 2.11. Из рис. 2.11 (б) и (в) следуют определения времени задержки, времени спада напряжения и времени включения. Для быстрого включения необходимы импульсы управляющего тока большой амплитуды (2-3 IGT, где IGT - ток включения) и с крутым передним фронтом. Такие импульсы управления особенно необходимы при высокой частоте переключении для снижения потерь мощности в вентиле при включении и при последовательном или параллельном соединении вентилей для уменьшения обусловленной разбросом параметров неравномерности распределения между ними, соответственно, напряжения или тока при включении. Скорость нарастания прямого тока при включении зависит от параметров нагрузки. При низкой скорости нарастания (большая индуктивность в цепи нагрузки) необходимо позаботиться, чтобы к моменту окончания импульсов управления анодный ток достиг значения тока удержания, так как в противном случае после окончания управляющего импульса вентиль вернется в запертое состояние. При активной или емкостной нагрузке скорость нарастания тока велика и возникает опасность превышения предельно допустимой скорости нарастания тока и выхода вентиля из строя. В этом случае последовательно с вентилем включается линейный или насыщающийся дроссель, который должен снизить скорость нарастания тока или задержать скачок тока, чтобы вся поверхность кремниевой шайбы перешла во включенное состояние к моменту, когда ток станет значительным.
Для предотвращения самопроизвольного (то есть без подачи управляющего импульса) включения вентиля из-за крутого нарастания прямого напряжения необходимо, чтобы скорость нарастания напряжения не превышала критического значения. Для симистора индуктивность цепи нагрузки не должна быть слишком большой, чтобы не была превышена критическая скорость нарастания коммутируемого напряжения непосредственно после изменения его полярности.
Рис. 2.11. Кривые прямого тока (а), напряжения (б) и импульса управляющего тока (в) при включении тиристора или симистора: diT/dt – скорость нарастания прямого тока; UDM – прямое блокируемое напряжение перед включением; IFGM – амплитуда импульса тока управления; tИ – длительность импульса управления; td – время задержки; tr – время спада напряжения; tgt – время включения
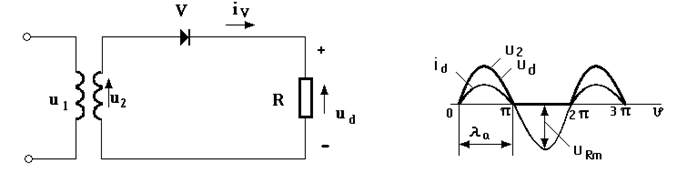
Общие сведения. Выпрямитель – устройство, предназначенное для преобразования энергии переменного тока в энергию постоянного тока. Основными элементами выпрямителя являются трансформатор и вентили, с помощью которых обеспечивается протекание тока в цепи нагрузки, в результате чего переменное напряжение преобразуется в пульсирующее выпрямленное. Для сглаживания пульсаций выпрямленного напряжения на выходе выпрямителя подключают сглаживающие устройства, а также для регулирования или стабилизации выпрямленного напряжения и тока потребителя иногда подключают регулятор или стабилизатор (стабилизатор может быть включен в цепи переменного тока). Теория выпрямительных устройств в основном сводится к определению расчетных соотношений, позволяющих по заданному режиму работы потребителя определить электрические параметры элементов стабилизатора, регулятора, сглаживающих устройств (фильтров), вентилей и трансформаторов выпрямителя, а затем выбрать или рассчитать их. В режиме выпрямителя, характеризующемся отдачей активной мощности в цепь нагрузки, напряжение вторичной обмотки трансформатора и анодный ток вентилей имеют одинаковое направление (соответствует работе сети переменного тока в качестве генератора), а напряжение и ток нагрузки противоположны по направлению (соответствует работе сети постоянного тока в качестве потребителя энергии). В зависимости от числа фаз напряжения питания различают однофазные и трехфазные выпрямители. Независимо от мощности все выпрямители подразделяют на однотактные (однополупериодные) и двухтактные (двухполупериодные). К однотактным относятся выпрямители, у которых по вторичным обмоткам трансформатора ток проходит в одном направлении за полный период (полупериод или его часть). Отношение частоты пульсаций выпрямленного напряжения к частоте сети в однотактных выпрямителях равно числу фаз вторичной обмотки трансформатора. К двухтактным относятся выпрямители, у которых в каждой фазе вторичной обмотки трансформатора ток проходит дважды за период в противоположных направлениях. Двухтактные выпрямители называют также мостовыми, в которых ток во вторичной цепи всегда проходит последовательно по двум тиристорам. Выпрямители подразделяют на простые и составные. В составных несколько простых выпрямителей соединяются последовательно или параллельно. Выпрямители могут быть построены на управляемых (тиристоры, симисторы) и неуправляемых (диоды) вентилях. Выходные параметры выпрямителя, диапазон регулирования, условия работы вентилей, трансформатора зависят от характера реакции нагрузки, определяемого типом нагрузки или первым элементом фильтра. Различают следующие режимы работы выпрямителя: - на активную нагрузку; - на активно-индуктивную нагрузку; - на противоЭДС; - на активно-емкостную нагрузку. Основными характеристиками, определяющими эксплуатационные свойства выпрямителей, являются:
1. средние значения выпрямленных напряжения Ud и тока Id; 2. внешняя характеристика – зависимость напряжения на выходе от тока нагрузки: Ud = f( Id); 3. регулировочная характеристика – зависимость выпрямленного напряжения от угла управления a : Ud a= f( a); 4. коэффициент полезного действия h; 5. коэффициент мощности c; 6. коэффициент пульсаций – отношение напряжения пульсаций к среднему значению идеально выпрямленного напряжения (тока): q = Uq/ Udi0. В дальнейшем рассматривается работа управляемых выпрямителей, а работа выпрямителей на диодах представлена как частный случай при a = 0°. Для упрощения изложения материала выпрямитель принимается как «идеальный», т.е. напряжение на его выходе при холостом ходе рассматривается без учета каких-либо падений напряжений на элементах схемы. Соответствующие падения напряжения учитываются при построении нагрузочных характеристик.
Работа на активную нагрузку Схема выпрямителя показана на рис. 3.1. Поскольку рассматривается идеальный выпрямитель, то u2= U2m·sinu = KT ·u1= u′1, где u = w · t, а KT – коэффициент трансформации идеального трансформатора. Под действием u2 ток в цепи нагрузки протекает только в течение тех полупериодов, когда анод вентиля V имеет положительный потенциал относительно катода. Таким образом, вентиль V пропускает ток в первый полупериод. Во второй полупериод, когда потенциал анода становится отрицательным, ток в цепи равен нулю, т.е. id =i2 =
id = i2 =0 (p < u < 2p)
Выпрямленное напряжение
ud =Rd · id =Udm · sinu (3.1)
где Udm - амплитудное значение выпрямленного напряжения. Среднее значение выпрямленного напряжения
Udio =
Среднее значение выпрямленного тока (также тока V)
Id= Ud / Rd = U2m /( p ·Rd) (3.3) Действующее значение тока вентиля: IRMS =
Максимальное обратное напряжение на вентиле достигает амплитудного значения напряжения вторичной обмотки: URRM=U2m= p ·Udio (3.5)
На рис. 3.1 представлены временные диаграммы напряжений и токов, поясняющие работу выпрямителя.
Изменяя угол сдвига a, управляющего импульса относительного напряжения анодной цепи u2, можно регулировать среднее значение выпрямленного напряжения. В этом случае среднее значение выпрямленного напряжения определяется по формуле: Udi a =
где Udi0 - значение Ud при a = 0 для идеального выпрямителя. Разложение функции напряжения со средним значением Udi 0 в ряд Фурье дает гармонические составляющие с номерами n = 1,2,3... Действующее значение всех гармоник, содержащейся в кривой выпрямленного напряжения, называется напряжением пульсаций Uq , а его отношение к идеальному постоянному напряжению Udi 0 -коэффициентом пульсаций: q= Uq / Udi 0. (3.7)
Если в кривой постоянного напряжения содержится лишь единственная синусоидальная гармоническая составляющая, то коэффициент пульсаций определяется по формуле:
q’ =(Ud max-Ud min)/(Ud max+Ud min) (3.8)
где Ud max и Ud min – соответственно максимальное и минимальное значение постоянного напряжения в течение одного периода. При этом коэффииент пульсаций в 2 раз больше, чем расчитанный по формуле (3.7). Значение q обычно определяют по амплитуде первой (основной) гармонической составляющей как наибольшей из всех остальных и трудно поддающейся фильтрации. Природа высших гармонических составляющих, их определение и расчет более подробно изложены в гл.4. Для рассматриваемой схемы q =1.21 . Регулировочная характеристика выпрямителя в режиме работы на активную нагрузку показана на рис. 3.6, а зависимость длительности l a открытого состояния вентиля в режиме прерывистого тока от угла управления a при различных значениях jн ( jн =arctg w Lн / Rн) определяет угол отставания вектора тока нагрузки от вектора напряжения (см. рис. 3.7).
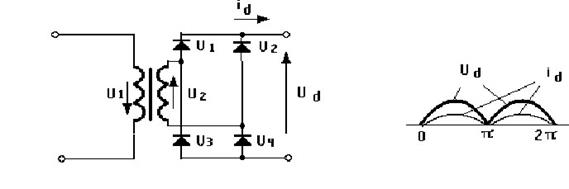
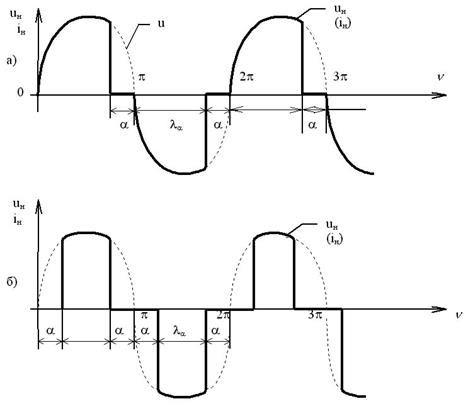
Работа на активную нагрузку При поступлении полуволны напряжения u1 положительной полярности (интервал 0 £ u £ p) на вторичных обмотках трансформатора действуют напряжения u21 и u22 с полярностью относительно нулевой точки (рис. 3.9, а без скобок). На интервале 0 £ u £ p вентиль V1 открыт, а V2 закрыт. На данном интервале ток вентиля V1 равен току нагрузки iV1 = id = u21/R. В последующем процессы в схеме повторяются: поочередно проводят ток то вентиль V1, то V2. Временные диаграммы при a = 0 и a ¹ 0 показаны на рис. 3.10, а и б. Среднее значение выпрямленного напряжения U d определяется из временной диаграммы:
Udio = Поскольку величина U d при расчете выпрямителя является заданной, значение вторичного напряжения трансформатора определяется из выражения:
U2 =
Коэффициент пульсаций по первой гармонике для двухполупериодного выпрямителя (нулевой и мостовой схем) составляет q = 0.67, т.е. амплитуда первой гармонической составляет 67% от U d.
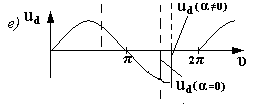
Рис. 3.10. Временные диаграммы работы однофазного двухполупериодного выпрямителя на активную нагрузку при a = 0 (а) и a ¹ 0 (б)
Так как ток i d протекает через вентили поочередно, средний ток через каждый вентиль составит:
IV = Id /2 (3.11)
Когда ток проводит открытый вентиль, на закрытый вентиль действует обратное напряжение. При открытом вентиле V1 на V2 в обратном направлении действует суммарное напряжение двух полуобмоток трансформатора Т, в связи с чем URRM = 2u2, т.е.
URRM = 2
Поскольку ток вторичной обмотки определяется анодным током соответствующего вентиля (i2 = iV ), то действующее значение тока вторичной обмотки будет:
I2 =
Ток i2 в первичной обмотке трансформатора Т имеет синусоидальную форму и для каждого полупериода определяется током вторичной обмотки с учетом коэффициента трансформации КТ: I2m = откуда I1 = Временные диаграммы для случая a ¹ 0 приведены на рис. 3.10, б. Среднее значение выпрямленного напряжения Udi a определяется соотношением (3.6), а регулировочная характеристика – кривой рис. 3.6.
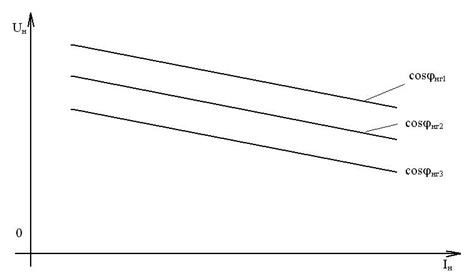
Инвертора. Автономные резонансные инверторы (АИР) предназначены для преобразования постоянного напряжения в переменное напряжение повышенной частоты (от 500 Гц до 10кГц и выше). Основной областью применения таких преобразователей в энергетике является электротермия (индукционные печи). Однако АИР достаточно широко применяется и в передвижных (авиация, судоходство) установках в качестве источников повышенной частоты. АИР обычно выполняют однофазными и преимущественно по мостовой схеме с использованием одно-операционных тиристоров. Конденсатор в АИР может включаться параллельно нагрузке, но с гораздо меньшим значением индуктивности дросселя Ld, или последовательно нагрузке. В зависимости от этого различают параллельные и последовательные АИР. Процессы, протекающие в АИР, характеризуются колебательным (резонансным) перезарядом конденсатора в цепи с индуктивностью, в которую может входить индуктивность нагрузки. На практике в АИР чаще используют последовательное или последовательно-параллельное включение конденсаторов. На рис. 3.36 приведена схема АИР, состоящая из инверторного моста на вентилях VS1-VS4 и последовательно включенных в его диагонали конденсатора С, нагрузки RН и LН дополнительного дросселя L. Характер зависимости выходного тока инвертора iН (тока нагрузки iН) обусловлен колебательным процессом перезаряда конденсатора С с частотой ω0 последовательного колебательного контура, образованного реактивными элементами выходной цепи. Благодаря тому, что в схеме соблюдается соотношение ω0 > ωp, (ωp - частота повторения управляющих импульсов VS1-VS4) колебательные процессы перезарядки конденсатора (рис.3.37, в) заканчиваются до отпирания очередной пары вентилей (рис. 3.37,б). Вследствие этого в кривых тока нагрузки и тока источника питания создаются паузы, необходимые для восстановления запирающих свойств выходящих из работы вентилей перед отпиранием очередной пары. Отработавшие свой цикл тиристоры закрываются из за прерывания в них тока, связанного с процессом перезаряда конденсатора. По окончании перезаряда (момент времени где th - время, предоставляемое вентилю для восстановления запирающих свойств (схемное время); Кзап = 1,2 - 1,5 - коэффициент запаса; tq- собственное время выключения вентиля, определяемое по паспортным данным. Анализ АИР, как и АИТ проводят методом основной гармоники. В этом случае действующее значение первой гармоники напряжения инвертора будет равно: Действующее значение выходного тока инвертора IН и среднее значение потребляемого от источника питания тока Id связаны соотношением: Управление баланса активной мощности определяется выражением:
Е Id = UН IН cosj НГ. (3.77)
Рис. 3.36. Схема последовательного АИР
Рис.3.37. Временные диаграммы последовательного АИР (а-е)
Рис.3.38. Внешние характеристики АИР
Из уравнений (3.76) и (3.77) определим связь действующего напряжения на нагрузке с действующим значением первой гармоники напряжения инвертора:
Из полученных зависимостей видно, что при уменьшении активного сопротивления нагрузки входной ток инвертора возрастает. Также возрастают напряжения на конденсаторе, вентилях и время th. При увеличения сопротивления нагрузки время th резко уменьшается, т.е. инвертор теряет работоспособность в режиме холостого хода. Внешние характеристики АИР показаны на рис. 3.38. Совпадающий характер выходных характеристик при фиксированных значениях cosjНГ объясняется зависимостью E = f(Id) источника питания, т.е. его внешней характеристикой, а также падением напряжения на вентилях и активном сопротивлении дросселя. Важной особенностью АИР, в отличие от АИТ и АИН, является его работоспособность в режиме короткого замыкания нагрузки. Ток инвертора при этом ограничивается только суммарным активным сопротивлением дросселя, подводящих проводов, падением напряжения на вентилях.
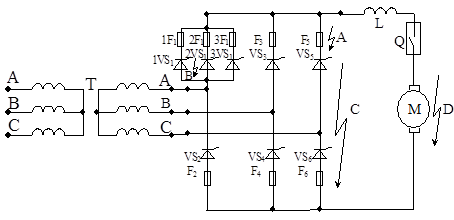
Реверсивный ИППН. Реверсивные ИППН по сравнению с выше описанными обеспечивают не только регулирование, но и изменение полярности выходного напряжения U2. Применяются они для управления двигателями постоянного тока при регулировании частоты и направления вращения.
Принципиальная схема реверсивного ИППН приведена на рис. 3.41, временные диаграммы приведены на рис. 3.42 и рис. 3.43.
В данной схеме обеспечивается поочередное включение накрест лежащих тиристоров. При этом выходное напряжение U2 имеет вид двуполярной кривой. Среднее значение этого напряжения определяется из соотношения (3.82): где tз1 – интервал проводимости тиристоров VS1 и VS4, tз2 – интервал проводимости тиристоров VS2 и VS3. Диоды, включенные встречно - параллельно тиристорам, служат для создания цепи протекания тока противо - ЭДС активно - индуктивной нагрузки. Различают три режима работы реверсивного РИППН: -Положительная полярность напряжения и тока нагрузки (параметр g = KU = tз1/ T > 0.5); -Отрицательная полярность напряжения и тока нагрузки (параметр g = KU = tз1/ T < 0.5); -Напряжение и ток нагрузки равны нулю – момент реверса (параметр g = KU = tз1/ T = 0.5). Рассмотрим режим работы преобразователя при g > 0,5 (рис. 3.41, рис. 3.42). В этом случае время проводимости тиристоров VS1 и VS4 больше, чем время проводимости VS2 и VS3. Во время tз1 включены тиристоры VS1 и VS4, через них и через нагрузку ZН от источника тока U1 течет ток Поскольку при g > 0,5 tз1 всегда больше tз2, ток (i2 = При g < 0,5 tз1< tз2, следовательно, направление тока в нагрузке будет задаваться током -
Переменного напряжения. При широтно-импульсном регулировании тиристоры в течение определенного числа периодов питающего напряжения проводят ток, а затем в течение определенного числа периодов заперты (рис. 3.52). В этом случае вместо плавного имеет место ступенчатое регулирование мощности в нагрузке и питания нагрузки происходит в виде относительно редких импульсов. Для реализации этого метода требуется схема вида (рис. 3.44 или рис.3.55). Степень снижения мощности в нагрузке прямо пропорциональна отношению длительности импульса Tи, соответствующего включенному состоянию вентилей Твкл, к длительности периода повторяемости циклов импульс - пауза Tи+Tп:
P = P max · Tи / (Tи + Tп) (3.99)
где Тп - длительность паузы, соответствующей выключенному состоянию вентилей Твыкл. Недостатком схемы является присутствие гармонических в токе сети с частотами ниже 50 Гц, что обусловливается импульсным характером потребления из сети. Указанный недостаток не существен, если постоянная времени нагрузки много больше, чем длительность цикла регулирования, что, например, имеет место при регулировании температуры печей, сопротивления и т.д. Следует отметить, что этот недостаток в значительной степени ослабляется при питании от общей сети переменного тока из нескольких преобразователей.
Выбор тиристоров для преобразователя широтно - импульсным регулированием потоку определяется выражением (3.95). Поскольку отпирание тиристоров происходит в моменты перехода напряжения через нуль, скорость нарастания тока даже при чисто активной нагрузке невелика. Однако при редких импульсах тиристоры могут быть нагружены несколько большими токами. Вследствие этого допустимый ток рассчитывается не по (3.95), а по кривым теплового сопротивления.
Рис. 3.44. Принципиальная схема однофазного регулятора переменного напряжения
Рис. 3.45. Временные диаграммы регулятора переменного напряжения при фазовом методе регулирования: напряжение и ток нагрузки – (а), а также напряжение на тиристоре (б) при отстающем угле управления a
Рис. 3.46. Временные диаграммы регулятора переменного напряжения при фазовом методе регулирования: а – напряжение и ток нагрузки, при опережающем угле управления a; б — то же при двустороннем регулировании Рис. 3.47 Регулировочные характеристики при фазовом методе регулирования переменного напряжения для активной нагрузки: 1—при отстающем и опережающем углах управления a; 2—при двустороннем фазовом регулировании; 3—полууправляемая схема
а) б) Рис. 3.50 Варианты схем однофазного регулятора переменного напряжения
Рис. 3.51. Зависимости угла фазового сдвига j (1) от угла управления a при разных значениях фазового угла нагрузки j НГ однофазного регулятора переменного напряжения
Рис. 3.52. Принцип низкочастотного широтно - импульсного регулирования мощности
Цель и задачи главы За последние годы большое развитие получили технологии, использующие управляемые выпрямители, что привело к увеличению гармоник тока в сетях. Проблема высших гармоник в электрических сетях является наиболее важной частью проблемы электромагнитной совместимости (ЭМС) электрооборудования. Для правильного расчета гармоник тока, генерируемых преобразователями энергетической электроники, необходимо иметь точную информацию о форме кривой напряжения переменного тока на выводах преобразователя, его схеме, типе системы управления, полном сопротивлении сети переменного тока и параметрах цепи постоянного тока. Основными источниками гармоники тока являются выпрямители и инверторы с фазовым управлением. Все они могут быть разделены на три большие группы. 1 преобразователи большой мощности, используемые, например, в металлургии и в передачах постоянного тока высокого напряжения; 2. преобразователи средней мощности, используемые в вентильных электроприводах и на железной дороге; 3 преобразователи малой мощности, используемые в бытовой аппаратуре и для подзаряда аккумуляторов. Регуляторы напряжения переменного тока, представляющие встречно-параллельно включенные пары тиристоров в каждой фазе, генерируют изменяющиеся по амплитуде гармоники.
Отрицательное влияние высших гармонических составляющих на работу электрооборудования в данном учебнике не рассматривается.
Рис. 4.1. Импульсы фазных токов однополупериодного преобразователя
Цель данной главы — показать влияние преобразователей на питающую сеть вследствие генерирования ими высших гармонических составляющих, рассмотреть способы уменьшения этого влияния на систему электроснабжения 4.2. Преобразователи большой и средней мощности Данные преобразователи, как правило, имеют со стороны постоянного тока индуктивность много большую, чем со стороны переменного тока. При этом преобразователь является источником гармоник напряжения на стороне постоянного и источником гармоник тока на стороне переменного токов. Рассмотрим идеальный однополупериодный преобразователь с пульсностью р, который имеет нулевое сопротивление сети переменного тока и сглаживающую индуктивность с бесконечно большим сопротивлением (см. рис. 3.13). В этом случае фазовые токи представляют собой периодические, положительные прямоугольные импульсы длиной
Так как фазовый ток двухполупериодного преобразователя состоит из положительных и отрицательных импульсов вида т.е. исчезают составляющие постоянного тока и гармоники четных порядков. Запись выражения (4.3) для формы кривой (рис 4.1), где в котором гармоники с номерами n = 1, 5, 9 и т.д. присутствуют с положительными, а гармоники с номерами n =3, 7, 11 и т.д. — с отрицательными знаками. Подставив значения w для каждой схемы в уравнение (4.4), можно получить выражения для переменного тока фазы. Анализ полученных выражений показывает, что гармонический состав потребляемого от сети тока зависит лишь от числа пульсности преобразователя р и для любой схемы (при р > 1) справедливо выражение (табл. 4.1):
Для полностью сглаженного выпрямленного тока и при отсутствии индуктивностей рассеяния трансформатора и индуктивных сопротивлений сети переменного тока потребляемый преобразователем от сети ток имеет прямоугольную форму. Основная гармоника потребляемого тока I1(1) имеет действующее значение I1(1)= kiI1 (4.6)
где k i — коэффициент, учитывающий искажения кривой тока (табл. 4.1), I1 — действующее значение потребляемого тока. С учетом сделанных допущений действующее значение гармоники n -го порядка I1n , определяется из выражения: I1(v)=I1(1)/v=ki · I1 /n , (4.7) а действующее значение I1Г всех высших гармонических составляющих потребляемого тока I1Г =
Фаза гармоники зависит от схемы соединения обмоток выпрямительного трансформатора. Поэтому, например, формы токов шестипульсных схем при соединении трансформатора «звезда-треугольник» и «звезда-звезда» будут различными, хотя в обоих случаях порядок гармоник и их действующие значения одинаковы.
Таблица 4.1 Кратность гармоник в выпрямленном напряжении и в потребляемом от сети токе
Действующие значения гармоник, вычисляемые по (4.7), являются максимально возможными. В реальном выпрямителе величина гармоник меньше, так как из-за влияния индуктивных сопротивлений в цепи переменного тока потребляемый от сети ток изменяется не скачками, а плавно.
Рис 4.2. Изменение относительного действующего значения ν – й гармоники потребляемого от сети тока ( по отношению к значению этого тока в идеальном выпрямителе ) в зависимости от значения uк , % при разных углах управления (а) – ν = 5 ; (б) – ν = 7
Известно, что увеличение индуктивности в цепи переменного тока приводит к возрастанию значения угла коммутации g. Хотя увеличение этой индуктивности и приводит к уменьшению содержания гармонических составляющих, но только до определенного значения g , выше которого доля высших гармонических в кривой потребляемого тока начинает возрастать [16]. Однако что начинает сказываться при достаточно больших значениях угла и в реальных преобразованиях практически не наблюдается. При наличии угла управления a ¹ 0 процесс коммутации тока ускоряется, и поэтому скорость нарастания импульсов тока, потребляемого от сети, также возрастает. В § 3.5 было показано, что индуктивное сопротивление в цепи переменного тока состоит из индуктивных сопротивлений трансформатора Хт и сети Хс. Необходимо отметить, что в реальных условиях превалирующее значение имеет величина Хт и с достаточной степенью точности можно принять Хэ» Хт . Индуктивное сопротивление трансформатора определяется его напряжением короткого замыкания uк, %, точнее, его реактивной составляющей. Поэтому обычно графики изменения относительного действующего значения n -й гармоники потребляемого от сети тока по (4.7) строят в зависимости от значений uк,% [10, 14, 18]. Зависимости относительных значений гармоник n = 5 и 7 по отношению к действующему значению рассчитаны по (4.7) от ик,% при разных углах управления a и приведены на рис. 4.2. Анализ изменения во времени выпрямленного напряжения u d с разложением в ряд Фурье так же, как и тока, показывает, что порядок гармонических составляющих n зависит от пульсности схемы преобразователя и не зависит от конкретной схемы выпрямления. В этом случае справедливо следующее выражение:
где k = 1,2,3. Действующее значение напряжения гармонической составляющей n-го порядка U n зависит от среднего значения выпрямленного напряжения Udi 0 идеализированного выпрямителя и равно (при р > 1)
Упомянутое в § 3.2 напряжение пульсаций Uq, может быт рассчитано следующим образом: Коэффициент пульсаций для схем с большим числом фаз выпрямления можно определить при указанных ранее идеальных условиях лишь по наиболее низкочастотной гармонике. Так, в шестипульсной схеме выпрямления можно учитывать лишь гармонику n = б. Это дает
а с учетом всех гармоник q=0,042, т.е. ошибка в определении q получается менее 0,2%, Результирующий (полный) коэффициент содержания гармоник, точнее, согласно ГОСТу 13109-87 коэффициент несинусоидальности кривой напряжения Кн сU , определяется отношением действующего значения всех высших гармонических к действующему значению напряжения: Графики изменения действующего значения напряжения гармонической составляющей n = 6 в зависимости от uк, % при различных значениях угла управления a; приведены на рис. 4.3.
Рис. 4.3. Зависимость относительного значения действующего напряжения гармоники
ν =6 ( по отношению напряжения в идеальном выпрямителе ) от значения uк,% при различных углах управления α
Рис. 4.4. Зависимость относительного содержания первой гармоники в выпрямленном напряжении от значения угла управления для двухпульсной и шестипульсной схем
Введение угла управления a, а также коммутационные потери напряжения вследствие наличия индуктивных сопротивлений трансформатора и сети существенно увеличивают амплитуду гармоник, и в связи с этим пульсации выпрямленного напряжения растут, хотя гармонический состав остается неизменным и может быть по-прежнему определен по выражению (4.9). На рис. 4.4 приведены кривые для р = 2 и р = б, показывающие изменение относительного содержания первой гармоники в выпрямленном напряжении при изменении угла a. Как видно из кривых, относительное содержание гармонической возрастает с увеличением a. Меньшее содержание гармонических и их более высокая частота с увеличением р существенно упрощают задачу сглаживания напряжения и тока нагрузки. На систему электроснабжения В § 4.2 - 4.4 было установлено отрицательное влияние преобразователей на систему электроснабжения с точки зрения ухудшения качества напряжения сети, а именно: • форма кривой напряжения сети, питающей преобразователь, может отличаться от синусоидальной из-за процессов коммутации вентилей; • действующее значение напряжения сети в точке подключения преобразователя, особенно при резких изменениях потребляемой реактивной мощности, может изменяться. Согласно ГОСТу 13109-87 качество напряжения помимо других показателей определяется отклонением формы кривой напряжения от синусоидальной и изменением его действующего значения при помощи показателя глубины провала напряжения d Un и ее длительности
Глубину провала напряжения (в %) в соответствии с рис. 4.7 вычисляют по формуле:
Рис. 4.7. Провал напряжения по ГОСТу 13109 – 87
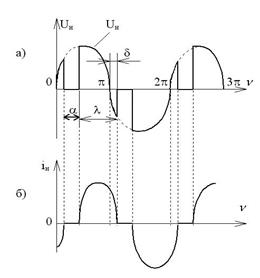
Рис. 4.8. Искажение кривой переменного напряжения за счет коммутационных процессов: U – кривая искаженного напряжения; U1 – основная гармоника напряжения
где Uмин — минимальное действующее значение напряжения в течение провала напряжения. Следовательно, глубина провала напряжения есть разность между номинальным значением напряжения и минимальным действующим значением напряжения в течение провала, выраженная в единицах напряжения или в процентах номинального значения напряжения. Очевидно, учитывая положения, изложенные в § 3.5, можно представить, что провал напряжения можно идентифицировать значением коммутационного снижения напряжения Ud g, а длительность провала напряжения, т.е. интервал между начальным моментом провала и моментом восстановления напряжения до первоначального или близкого уровня, — углом коммутации (см. рис. 4.8). В этом случае можно написать:
или
Коэффициент несинусоидальности кривой напряжения К HCU определяется по формуле (4.12), а коэффициент n -й гармонической составляющей напряжения — как отношение действующего значения n-й гармонической составляющей напряжения, определяемого из (4.10), к действующему значению гармонической составляющей основной частоты, т.е.: KUv = Uv /Uном. (4.28) Необходимо отметить, что хотя ГОСТ 13109-87 и устанавливает понятия этих величин, но не все на данный момент регламентирует, кроме коэффициента не синусоидальности кривой напряжения и коэффициента n -й гармонической составляющей напряжения. Нормальное и максимальное допустимые значения указанных величин приведены в табл. 4.3. Таблица 4.3 Параметры для оценки качества напряжения сети
Если показатели качества электроэнергии-при работе преобразователя превышают допустимые значения, приведенные в табл. 4.3, следует принять меры по снижению отрицательного влияния преобразователей на питающую сеть (табл. 4.4).
Сбои в системе управления а) В реверсивных преобразователях постоянного тока имеется опасность серьезной аварии, если из-за ошибки в логическом блоке системы управления оба вентильных комплекта будут работать в выпрямительном режиме и в контуре, образованном обоими комплектами, возникает ток короткого замыкания, который ограничивается лишь весьма малым сопротивлением этого контура. б) В автономном инверторе появление ошибочного импульса управления представляет большую опасность из-за возникновения значительного тока разряда сглаживающего конденсатора.
Переменного тока. В большинстве случаев в качестве номинального выбирается напряжение из стандартного ряда 220,380,660 В, причем действующее значение может изменяться в пределах 92.5-105% номинального значения. При бестрансформаторном включении выпрямителя этому сетевому напряжению соответствует идеальное выпрямленное напряжение, указанное для соответствующей схемы в табл.5.1
Таблица 5.1 Соотношение напряжений для наиболее употребительных схем
Рис. 5.2. Диаграмма, иллюстрирующая несинусоидальность кривой переменного напряжения сети: uc - мгновенное значение напряжения сети; uci - мгновенное значение основной гармоники
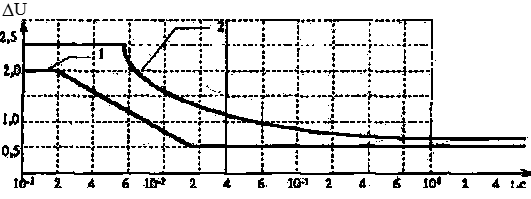
Форма кривой переменного напряжения сети должна быть синусоидальной, однако, при выключенном выпрямителе допускается отклонение мгновенного значения напряжения h2 от мгновенного значения h3 основной гармоники не свыше 5 % амплитудного значения h1 основной гармоники (рис.5.2). В случае 12–фазного преобразователя мгновенное значение питающего напряжения должно отклоняться от основной гармоники не более чем на 0.025h1, чтобы гарантировались необходимые для 12–фазного режима условия. Значения допустимых непериодических перенапряжений приведены на рис.5.3. При перенапряжениях, соответствующих области, расположенной ниже кривой 1, преобразователь еще работоспособен; в области между кривыми 1 и 2 должна сработать схема защиты, чтобы преобразователь не вышел из строя.
Рис. 5.3. 3ависимость допустимых перенапряжении DU, накладывающихся на амплитудное значение Ucm напряжения сети, от их длительности t
Непериодические перенапряжения длительностью до 10 мс не должны превышать амплитудного значения испытательного напряжения на сетевой стороне преобразователя. Переменное сетевое напряжение не должно снижаться более , чем на 15% номинального напряжения в течении времени, не превышающего 0.5 с (допустимые колебания ±10% в течение не более 1 с). Кратковременные провалы или всплески сетевого переменного напряжения, которые происходят из-за коммутации тока вентилей должны составлять не более 5% амплитудного значения основной гармоники в течение не более 1.5 мс.
Условия окружающей среды. К особо важным параметрам, характеризующим условия окружающей среды, относятся: высота над уровнем моря (нормальные условия до 1000 м); относительная влажность (нормальные условия-до 80% при 20°С); температура окружающей среды: а) для естественного и принудительного охлаждения от -10°С до +40°С; б) для водяного охлаждения больше +5°С; в) для масляного охлаждения больше -5°С;
температура охлаждающей среды: а) для естественного и принудительного охлаждения до +40°С; б) для водяного охлаждения от -5 до +30°С; в) для масляного охлаждения от -5°С до +30°С. Полупроводниковые вентили особенно чувствительны к ухудшению условий охлаждения. Если предполагается, что температура окажется выше, чем "нормальная", необходимо снижать тепловое сопротивление охладителя или мощность потерь, что связано с необходимостью уменьшения тока, протекающего через вентиль.
Защита от перенапряжений. При разработке защитных мер от перенапряжений необходимо установить причину их появления, их амплитуду и энергию. Амплитуда перенапряжений, возникающих в самом преобразователе или установке, в большинстве случаев может быть определена заранее. Если источник перенапряжений находится вне преобразователя, определить их амплитуду и энергию бывает сложнее или это даже оказывается невозможным. При этом можно основывается на данных, которые получают из результатов измерений и статистической обработки. Основными видами перенапряжений являются: Перенапряжения, которые попадают в преобразователь из питающей сети , они возникают: а) из-за процессов переключения в соседних устройствах, например, при работе выключателей или перегорании предохранителей; б) из-за атмосферных разрядов, таких как молния; в) из-за резонансных явлений, обусловленных наличием гармоник в сетях, склонных к резонансу. Перенапряжения, которые могут возникать: а) из-за наличия в вентилях накопленного заряда неосновных носителей при выключении; б) из-за бросков тока при подключении к сети или отключении трансформатора преобразователя; в) при перегорании быстродействующих предохранителей, защищающих полупроводниковые вентили. Перенапряжения, которые попадают в преобразователь из цепи нагрузки, например, возникающие за счет процессов в цепи якоря, или цепи возбуждения машины постоянного тока, или за счет быстрого изменения тока при сильно индуктивной нагрузке (питание обмоток электромагнитов, электрическая дуга).
Аварийные режимы К наиболее часто встречающимся на практике аварийным режимам относятся следующие (рис. 6.10.):
Рис. 6.10. Варианты короткого замыкания в преобразователе
Короткое замыкание типа А (внутреннее короткое замыкание), возникающее из-за повреждения диода или тиристора(потеря вентильной прочности). Дефектный тиристор необходимо отделить от других цепей преобразователя, чтобы сохранить другие тиристоры. Короткое замыкание типа В (внутреннее короткое замыкание), возникающее из-за дефекта в одном из тиристоров, включенном параллельно с несколькими другими тири-стотами. Конфигурация короткозамкнутой цепи соответствует случаю А. Однако в то время, как в случае А происходит нарушение рабочего режима преоразователя, в случае В при соответствующем перераспределении нагрузки на оставшиеся тиристоры можно обеспечить дальнейшую работу устройства без перебоя при отключении дефектного тиристора с помощью защитного устройства. Дефектный тиристор заменяется при контрольной проверке устройства. Короткое замыкание типа С (внешнее короткое замыкание). Оно соответствует глухому короткому замыканию на выходных выводах выпрямителей. Короткое замыкание типа D , возникающее при коротком замыкании потребителя. Так как при этом между преобразователем и потребителем чаще всего включен сглаживающий реактор и, кроме того, имеется индуктивность токопроводящих шин, ток короткого замыкания оказывается меньше, чем в случае С. Аварийный режим типа Е – опрокидывание инвертора. Он возникает: а) из-за пропуска управляющего импульса на одном из вентилей инвертора; б) из-за снижения напряжения приемной сети; в) из-за бросков тока нагрузки. Ток короткого замыкания при этом протекает под действием как напряжения сети переменного тока, так и постоянного напряжения, питающего инвертор. Аварийный режим типа F-ток короткого замыкания в контуре, образованном двумя встречно-параллельно включенными вентильными комплектами (группами) в реверсивном преобразователе постоянного тока с раздельным управлением. Этот вид аварии возникает: а) из-за ошибки в работе логического блока системы управления; б) из-за наводок паразитных сигналов по цепи управления; в) из-за несвоевременного включения тиристоров; г) из-за недостаточной стойкости к величине du/dt. Аварийный режим типа G возникает, если ток нагрузки преобразователя оказывается больше, чем было принято при проектировании. Такой режим может возникнуть, например, если нагрузкой выпрямителя является двигатель постоянного тока и превышен допустимый момент нагрузки на его валу.
Пример выбора средств защиты преобразователя. Пусть задана трехфазная мостовая схема с выходным током Id ном = 72 А.Тиристоры защищены предохранителями, включенными в фазы. Из справочных таблиц для этой схемы преобразователя среднее значение тока тиристора: Id =Id нoм/3=72/3=24 A. Необходимое для выбора предохранителя действующее значение тока фазы составит: I=Idнoм/
Выбираем тиристор типа Т10–25 (среднее значение прямого тока Ird = 25 А; предельный ударный ток IrSM = 500 А; защитный показатель I2t=1250 А2с). Проверим, может ли предохранитель с номинальным током 50 А обеспечить защиту тиристоров от перегрузок. Чтобы при аварии не превысить предельный ударный ток тиристора 500 А, необходимо ограничить стационарный ток короткого замыкания на уровне 600 А (рис. 6.12, а) Это можно обеспечить за счет использования трансформатора с соответствующим напряжением короткого замыкания или включения токоограничивающего реактора (если гарантированное индуктивное сопротивление питающей сети недостаточно). При Iк = 0,6 кА из рис. 6.12, б (штриховая линия) следует, что для предохранителя с номинальным током 50 А (I2t)п=1000 А2/c, то есть меньше, чем значение (I2t)т тиристора. Таким образом, быстродействующая защита обеспечивается. Сопоставление перегрузочной характеристики тиристора и предохранителя (рис. 6.13 ) позволяет определить, требуется ли для защиты тиристора при больших длительностях перегрузки предусматривать еще какие-либо дополнительные устройства.
Магнитный усилитель Магнитный усилитель – усилитель электрических сигналов, основанный на использовании присущей ферромагнитным материалам нелинейной зависимости магнитной индукции В от напряженности магнитного поля Н. Управляемыми элементами в магнитном усилителе являются индуктивности с ферромагнитными сердечниками, в которых действуют два переменных магнитных поля: одно изменяется с частотой источника питания fc, другое – с частотой усиливаемого сигнала fy, причем fy<fc. Простейший магнитный усилитель состоит из двух одинаковых трансформаторов, первичные обмотки которых W1 включены последовательно и питаются от источника переменного напряжения Uс (рис. 6.21)
Рис. 6.21. Схема магнитного усилителя (управляемого дросселя)
Вторичные обмотки W2 двух трансформаторов включаются последовательно и навстречу друг другу, поэтому замыкание обмоток W2 на небольшое сопротивление не вызывает какого-либо изменения величины тока i1 в первичных обмотках. Если по обмоткам W2 пропустить постоянный ток, то вследствие нелинейного характера кривой намагничивания сердечников динамическая магнитная проницаемость m (проницаемость для переменного магнитного потока) уменьшается. В соответствии с этим уменьшается индуктивность L1, связанная с m соотношением: L1=2[0,4p W12S m /l ·108], (6.3)
где S – площадь поперечного сечения одного сердечника в см2; l – его средняя длина в см; W1 – число витков первичных обмоток. При этом ток в обмотках W1 возрастает в соответствии с формулой: где R- активное сопротивление первичной цепи. Такое устройство называется дросселем насыщения или управляемым дросселем. Управляемый дроссель становится усилителем, если последовательно с его обмотками W1 включить активное сопротивление Rн (пунктир на рис. 6.21), а вместо постоянного тока в обмотку W2 подать усиливаемый сигнал постоянного или медленно изменяющегося (по-сравнению со скоростьюизменения питающего напряжения Uс) тока Iу, большие непериодические перенапряжения можно подавать с помощью параллельного подключения конденсаторов. В этом случае важнее знать энергию этих перенапряжений, чем их амплитуду. Поэтому рекомендуется, чтобы энергия непериодических перенапряжений в сетях напряжением до 260 В, от которых питаются автономные преобразователи, не превышая 4 Дж. При более высоких напряжениях эта энергия может превышать 4 Дж, однако в этом случае необходимо согласование с изготовителем преобразователя. Лабораторный практикум
Цель работы: Знать принцип работы однофазного выпрямителя и воздействие сглаживающих фильтров на результаты их работы; ознакомится с основными выходными параметрами выпрямителей, и научиться находить экспериментально характеристики выпрямителя.
7.1.2. Приобретаемые навыки: - Уметь собирать требуемые схемы на стенде. - Уметь производить необходимые коммутации и переключения в схемах. - Уметь снимать и анализировать выходные параметры выпрямителей. - Научиться строить графики зависимостей и анализировать характеристики выпрямителей. - Понимать назначение сглаживающих фильтров и их влияние на результаты работы выпрямителей. - Научиться делать выводы по результатам работы.
7.1.3. Меры безопасности: - Работу производить в составе бригад из двух и более человек. - Перед началом работы убедиться в надежности заземления стенда. - Подключить заземление к осциллографу и цифровому вольтметру. - Подачу питания на стенд после сборки схемы производить с разрешения преподавателя или лаборанта. - Все необходимые перекоммутации в схеме производить при отключенном питании. - Замеры начинать с максимального предела измерения измерительного прибора. - При срабатывании защиты (перегорании предохранителя или искрении и при появлении запаха горящей изоляции) немедленно обесточить стенд и пригласить преподавателя (лаборанта).
Принцип работы Принцип работы описан в § 3.2, 3.3
Порядок выполнения работы 1. Изучить данные методические указания. 2. Собрать схему однополупериодного выпрямителя (рис. 7.1), подключить к нему активную нагрузку и замерить на различных нагрузочных резисторах (R2, R3, R4) среднее значение выпрямленного напряжения Ud и среднее значение идеально выпрямленного напряжения Udi0 (Udi0 измеряется при отключенной нагрузке прибором магнито-электрической системы) и переменную составляющую напряжения U q (ламповым вольтметром), зарисовать осциллограмму напряжений.
Рис. 7.1. Однополупериодная схема выпрямления на активную нагрузку.
Рис. 7.2. Мостовая схема выпрямления
Результаты измерений занести в таблицу 7.1. Таблица 7.1 Результаты измерений нагрузочной характеристики схем однофазных выпрямителей
U d – среднее значение выпрямленного напряжения на нагрузке; U q - действующее значение переменного напряжения на нагрузке; Um - максимальное (амплитудное) напряжение на нагрузке. kп - коэффициент пульсации выпрямителя kп = U q / Udi 0. I d – среднее значение выпрямленного тока на нагрузке; Udi 0 - среднее значение идеально выпрямленного напряжения выпрямителя. 3. К выпрямителю подсоединить поочередно фильтры (рис. 7.1) и выполнить замеры среднего значения выпрямленного напряжения Ud и среднего значения идеально выпрямленного напряжения Udi 0 (Udi 0 измеряется при отключенной нагрузке), а также U q – действующего значения напряжения на нагрузке. Рассчитать Um - максимальное (амплитудное) напряжение на нагрузке и КП1 - коэффициент пульсации выпрямителя совместно с фильтрами. Результаты занести в таблицу 7.2. 4. Собрать схему двухполупериодного выпрямителя (трансформатор со средней точкой) (рис.7) и выполнить аналогичные измерения, как и по пункту 7.1.6.2., зарисовать осциллограммы. Результаты занести в таблицу 6.1. 5. К двухполупериодному выпрямителю со средней точкой подсоединить поочередно фильтры (рис. 7.3) и выполнить замеры среднего значения выпрямленного напряжения Ud и среднего значения идеально выпрямленного напряжения Udi 0 (Udi 0 измеряется при отключенной нагрузке), а также U q – действующего значения напряжения на нагрузке. Рассчитать Um - максимальное (амплитудное) напряжение на нагрузке и КП1 - коэффициент пульсации выпрямителя совместно с фильтрами. Результаты занести в таблицу 7.2.
Таблица 7.2 Результаты измерений характеристик схем однофазных выпрямителей с различными сглаживающими фильт рами
6. Собрать схему мостового выпрямителя (рис. 7.2), выполнить аналогичные замеры, зарисовать осциллограммы. Результаты занести в таблицу 7.1. 7. К схеме мостового выпрямителя подсоединить поочередно фильтры (рис. 7.3) и выполнить замеры среднего значения выпрямленного напряжения Ud и среднего значения идеально выпрямленного напряжения Udi 0 (Udi 0 измеряется при отключенной нагрузке), а также U q – действующего напряжения на нагрузке. Рассчитать Um - максимальное (амплитудное) напряжение на нагрузке и КП1 - коэффициент пульсации выпрямителя совместно с фильтрами. Результаты занести в таблицу 7.2. 8. Для всех трех схем выпрямления в одних координатах построить нагрузочные характеристики U d = f(I d). 9. Снять осциллограммы напряжений для трех выпрямителей, работающих без фильтра при активно-индуктивной нагрузке. 10. Замеры по п.п. 3, 5, 7 выполнить на одной из активных нагрузок. Снять осциллограммы напряжений на нагрузке. 11. Рассчитать коэффициент сглаживания фильтров S = Kп / Kп1, где Кп - коэффициент пульсации на входе фильтра, т.е. того выпрямителя, на основе которого исследуется фильтр, Кп1 - коэффициент пульсации фильтра. Результаты занести в таблицу 7.2.
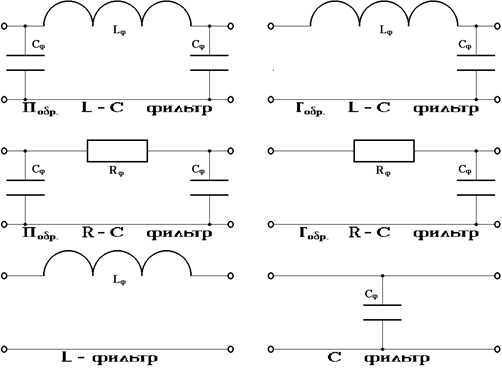
Рис. 7.3. Схемы сглаживающих фильтров Содержание отчета: - Принципиальные схемы исследуемых выпрямителей. - Основные осциллограммы, иллюстрирующие принцип работы выпрямителей. - Таблицы с измеренными и вычисленными величинами. - Выводы по выпрямителям и по фильтрам.
7.1.8. Контрольные вопросы: 1. Сравнить осциллограммы выпрямленного напряжения выпрямителей, работающих без фильтра на активную и активно-индуктивную нагрузки. 2. В чем различие между средним и действующим значением значениями выпрямленного тока? 3. Провести сравнительную оценку схем двухполупериодных выпрямителей (с выводом средней точки и мостовой). 4. Как изменяется коэффициент сглаживания при увеличении числа звеньев фильтра?
Принцип работы Принцип работы описан в § 3.6 Трехфазные выпрямители 7.3.1. Цель работы: Ознакомится с принципом работы и областью применения трех- и боле пульсных схем выпрямителей, научиться экспериментально определять параметры и характеристики выпрямителей и проводить анализ неисправностей в схемах трехфазных выпрямителей.
7.3.2. Приобретаемые навыки: - Уметь собрать требуемую схему на стенде. - Знать назначение каждого из элементов схемы. - Уметь определять место и характер возможных неисправностей трехфазного выпрямителя по полученным осциллограммам. - Научиться делать выводы по результатам проделанной работы.
7.3.3. Меры безопасности: - Работу производить в составе бригад из двух и более человек. - Перед началом работы убедиться в надежности заземления стенда. - Подключить заземление к осциллографу и цифровому вольтметру. - Подачу питания на стенд после сборки схемы производить с разрешения преподавателя или лаборанта. - Все необходимые перекоммутации в схеме производить при отключенном питании. - Замеры начинать с максимального предела измерения измерительного прибора. - При срабатывании защиты (перегорании предохранителя или искрении и при появлении запаха горящей изоляции) немедленно обесточить стенд и пригласить преподавателя (лаборанта).
Принцип работы Принцип работы описан в § 3.7, 3.8, 3.11
Параллельный инвертор тока 7.4.1. Цельработы: Изучить назначение и принцип работы инвертора, знать назначение элементов схемы и их влияние на выходные параметры инвертора, научиться классифицировать инверторы по их выходным параметрам и назначению.
7.4.2. Приобретаемые навыки: - Уметь собирать схемы инвертора на лабораторном стенде. - Знать назначение элементов схемы. - Научиться строить и анализировать характеристики инвертора. - Научиться делать выводы по результатам работы.
7.4.3. Меры безопасности: - Работу производить в составе бригад из двух и более человек. - Перед началом работы убедиться в надежности заземления стенда. - Подключить заземление к осциллографу и цифровому вольтметру. - Подачу питания на стенд после сборки схемы производить с разрешения преподавателя или лаборанта. - Все необходимые перекоммутации в схеме производить при отключенном питании. - Замеры начинать с максимального предела измерения измерительного прибора. - При срабатывании защиты (перегорании предохранителя или искрении и при появлении запаха горящей изоляции) немедленно обесточить стенд и пригласить преподавателя (лаборанта).
Принцип работы Принцип работы описан в § 3.13
Цель лабораторной работы: Ознакомится с принципом работы реверсивного широтно-импульсного преобразователя постоянного напряжения, научится визуально по тактам наблюдать принцип работы преобразователя, изучить значимость каждого элемента схемы преобразователя, научиться экспериментально снимать характеристики РИППН, научиться анализировать основные зависимости, отражающие работу преобразователя.
Приобретенные навыки - Уметь работать с компьютерной моделью лабораторного комплекса по энергетической электронике: уметь входить в программный лабораторный комплекс по энергетической электронике, выбирать компьютерную модель нужной лабораторной работы и выходить из программного комплекса. - Уметь работать с компьютерной моделью РИППН. - Научиться снимать и анализировать основные зависимости, отражающие работу преобразователя; - Научится строить графики зависимостей и анализировать характеристики преобразователя. - Научиться делать выводы при анализе работы РИППН.
Меры безопасности - Перед началом работы убедиться в надежности заземления компьютера. - При появлении боли в глазах или ухудшении самочувствия от работы с компьютером необходимо сделать перерыв не менее чем на 10 минут или совсем прекратить выполнение работы.
Принцип работы Принцип работы описан в § 3.16, 3.17, 3.18 Порядок выполнения работы. 1. Изучить данные методические указания. 2. Включить компьютер и выбрать файл “Пром.Электр”. 3. Выбрать работу (вариант №1 g > 0,5, вариант №2 g < 0,5). 4. Зарисовать схему РИППН. 5. Снять временные диаграммы для обоих вариантов. a) для варианта 1 (g > 0,5). б) для варианта 2 (g < 0,5). — UУПР на VS1,VS2; — UУПР на VS1,VS2; — UУПР на VS3,VS4; — UУПР на VS3,VS4; — UН на нагрузке; — UН на нагрузке; — IН на нагрузке; — IН в нагрузке; — I в VS1,VS2; — I в VS3,VS4; — I в VD3,VD4. — I в VD1,VD2. 6. Поочередно изменяя параметры t0, T, RН снять значения функций g, UН; IН; DIН; kП. Данные для фиксированных значений RН =10(Ом), 12 (Ом), 14(Ом), 16(Ом), 18 (Ом), 20 (Ом) занести в 6 вариантов таблицы 6.7 и построить графики зависимостей: UН = f(IН) при g = соnst, T = соnst; DIН = f ( R ) при g = сonst, T = соnst; kп= f( g ), при T = соnst; RН = const для g > 0.5; kп= f( g ), при T = соnst; RН = const для g < 0.5.
Таблица 7.7 Результаты измерений характеристик РИППН
7.5.8. Отчет должен содержать: - Принципиальную схему (с указаниями направлений токов); - Временные диаграммы, снятые с монитора; - Таблицы; - Графики снятых зависимостей UН = f(IН) при g = соnst, T = соnst; DIН = f(R) при g = сonst, T = соnst; kп= f(g) отдельные для g > 0.5 и g < 0.5 при T = соnst; - Выводы по работе.
7.5.9. Контрольные вопросы. 1. Чем объясняется неизменность направлений тока в нагрузке? 2.Какое назначение диодов, включенных встречно-параллельно тиристорам? 3. В каком направлении течет поток мощности в реверсивном ИППН? 4. Для чего в РИППН включаются обе пары тиристоров? 5. Как будет работать РИППН при пробое VD4 (Ri = 0)? 6. Как будет работать РИППН при обрыве в цепи VD4? 7. Как будет работать РИППН при пробое VS4? 8. Как будет работать РИППН при обрыве в цепи VS4? 9. Почему реверсивный РИППН называется реверсивным? Приобретенные навыки - Уметь работать с компьютерной моделью РПН в составе лабораторного комплекса по энергетической электронике. - Уметь входить в программный лабораторный комплекс по энергетической электронике, выбирать нужный вид компьютерной модели преобразователя и выходить из программного комплекса. - Научиться строить и анализировать характеристики РПН; - Научиться делать выводы при анализе работы РПН.
Меры безопасности - Перед началом работы убедиться в надежности заземления компьютера. - При появлении боли в глазах или ухудшении самочувствия от работы с компьютером необходимо сделать перерыв не менее чем на 10 минут или совсем прекратить выполнение работы. Принцип работы РПН. Принцип работы описан в § 3.19 Описание компьютерной модели РПН. Компьютерная модель (КМ) РПН представлена в виде трех вариантов работы РПН и одного четвертого варианта КМ РПН, моделирующего основные зависимости РПН. Первый вариант КМ, работа РПН при отстающем угле управления, содержит схему РПН и временные диаграммы, иллюстрирующие его работу (на экране справа от схемы). Схема содержит два встречно, включенные рабочие тиристоры Т1 и Т2, устройств защиты этих тиристоров Пр1 и Пр2 , нагрузку RН, входные клеммы РПН, подключенные к источнику переменного напряжения Uc. Элементы схемы задействованные на одном из тактов работы РПН высвечиваются голубым цветом в состоянии проводящем ток, и красным цветом в состоянии не проводящем ток (когда к элементу схемы приложено напряжение). Цепи принудительной коммутации в данном режиме работы РПН не задействованы. На диаграммах стоятся изменяющиеся во времени формы графиков отображаемых величин. Синхронно с изменением фазы отображаемых величин высвечиваются задействованные элементы схемы. На диаграммах Uc - напряжение сети, UН - напряжение нагрузки, IН - ток нагрузки, UТ - напряжение на тиристоре, Uу - напряжение на управляющем электроде. Второй и третий вариант КМ, работа при опережающем и двустороннем угле регулирования, отображены аналогично первому. Отличием является применение принудительной коммутации цепи. Коммутация тиристоров Т1 и Т2 при их закрывании высвечивается желтым цветом; тиристор, находящийся под напряжением угла регулирования высвечивается красным цветом. Подготовка цепей коммутации тиристоров Т1 и Т2 поочередно высвечивается оранжевым цветом. Четвертый вариант КМ РПН содержит принципиальную схему, значения и указатель клавиши регулирующей параметр a (Ins - увеличение, Hom - уменьшение), формулы, отражающие регулировочные характеристики РПН в различных режимах, значения - снимаемых функций при дискретных значениях угла регулирования a.
Содержание отчета - Принципиальная схема РПН. - Временные диаграммы работы РПН. - Таблица. - Графики снятых зависимостей UН / U = f(a). - Выводы.
7.6.8. Контрольные вопросы 1. За счет чего происходит изменение действующего значение напряжения при фазовом методе регулирования переменного напряжения? 2. В каких РПН не требуется принудительная коммутация тиристоров? 3. Чем отличаются диаграммы напряжений РПН, работающего на нагрузку, имеющую индуктивность и РПН, работающего на активную нагрузку. 4. Что называется углом регулирования. 5. Какая схема РПН обеспечивает регулировку напряжения от значения, равного напряжению на входе, до нуля при наименьшем диапазоне изменения угла регулирования a. 6. За счет чего обеспечивается широтно - импульсное регулирование переменного напряжения. Цель лабораторной работы: Ознакомиться с принципом работы однофазного ведомого сетью инвертора, научится визуально по тактам наблюдать принцип работы преобразователя, изучить значимость каждого элемента схемы преобразователя, научиться экспериментально снимать характеристики ОВСИ, научиться анализировать основные зависимости, отражающие работу инвертора. Приобретенные навыки - Уметь работать с компьютерной моделью лабораторного комплекса по энергетической электронике: уметь входить в программный лабораторный комплекс по энергетической электронике, выбирать компьютерную модель нужной лабораторной работы и выходить из программного комплекса. - Уметь работать с компьютерной моделью ОВСИ. - Научиться снимать и анализировать основные зависимости, отражающие работу преобразователя; - Научится строить графики зависимостей и анализировать характеристики преобразователя. - Научиться делать выводы при анализе работы ОВСИ.
Меры безопасности - Перед началом работы убедиться в надежности заземления компьютера. - При появлении боли в глазах или ухудшении самочувствия от работы с компьютером необходимо сделать перерыв не менее чем на 10 минут или совсем прекратить выполнение работы. Принцип работы. Принцип работы описан в § 3.14 Порядок выполнения работы 1. Изучить данные методического указания. 2. Включить компьютер нажать клавишу F2(меню) выбрать раздел «Промышленная электроника» 3 Выбрать в обучающем курсе по промышленной электронике, часть2 лабораторную работу "Однофазный ведомый сетью инвертор", используя клавиши "Tab" и "Enter". 4. Нажатием клавиши "Enter" выбрать первый вариант динамической модели инвертора: "Однофазный ведомый сетью инвертор с ключами". 5. Используя выше приведенное описание работы инвертора и его динамическую модель, высвечиваемую на экране монитора, исследовать временные диаграммы токов и напряжений инвертора синхронно с работой его схемы. При этом цвет временной диаграммы будет отражать процессы, протекающие в цепи схемы инвертора, высвечиваемой тем же цветом. 6. По мере завершения изучения работы динамической модели инвертора в первом варианте необходимо выйти в меню данной лабораторной работы одновременным нажатием клавиш "ALT² и "Х". 7. Нажатием клавиши "Enter" выбрать второй вариант динамической модели инвертора: "Однофазный ведомый сетью инвертор с тиристорами". 8. Исследовать временные диаграммы токов и напряжений инвертора синхронно с работой его схемы. В данной схеме инвертора используется опережающий угол регулирования. 9. Зарисовать схемы преобразователей и снять соответствующие схемам временные диаграммы, иллюстрирующие работу ОВСИ. 10. По мере завершения изучения работы второго варианта динамической модели инвертора необходимо выйти в расчетный вариант данной лабораторной работы одновременным нажатием клавиш "ALT² и "Х". 11. Изменяя угол регулирования b (бетта) нажатием клавиши "Home" или "End" снимите регулировочную характеристику инвертора Edu /Edu 0 = f (b). 12. Для трёх значений Еd клавишей "Insert" или "Delete" снимите зависимость Id = f(R) для различных значений Ed, изменением сопротивления нагрузки R нажатием клавиш "Page Up" или "Page Down". Значения изменяемых величин Ed, R, b высвечивается на мониторе в поле схемы инвертора, а вычисляемые величины Edu, Id, Edu/E du 0 под ним. Формулы вычислений показаны на экране монитора справа. 13. Заполнить 15 таблиц по форме таблицы 7.9, отражающих зависимости от b параметров Ed u, Edu/E du 0, Id при 15 сочетаниях параметров Ed и R, указанных в таблице 7.10 для каждого из четырех вариантов исходных данных. 14. Для указанных значений переменных и построить графики функций: Ed = f(Ia) при нескольких значениях R, b. Edu = f(b) Edu/Edu 0 = f(b)
Таблица 7.9 Результаты измерений характеристик ОВСИ при различных значениях угла b
Таблица 7.10 Варируемые параметры ОВСИ
Содержание отчета. - принципиальные схемы двух вариантов преобразователя; - временные диаграммы для двух вариантов преобразователя; - таблица 7.9; - графики снятых зависимостей; - выводы. 7.7.8. Контрольные вопросы 1. Каково назначение ведомого сетью инвертора? 2. Почему ток id протекает даже в интервале, когда E<U1 и E<U2? 3. Почему происходит отдача энергии источника Е в сеть переменного тока? 4. За счет чего обеспечиваются условия закрывания и открывания тиристоров? 5. Как противо-ЭДС влияет на ток потребляемый из сети постоянного тока? 6. Какой вид коммутации используется в ведомом сетью инверторe? 7. В чем сходство и различия между ведомым сетью инвертором и двухполупериодным выпрямителем со средней точкой? 8. Почему в ведомых сетью инверторах используются тиристиры, а не электромеханические ключи? 9. Напряжение какой сети (постоянного или переменного тока) влияет на величину противо-ЭДС инвертора? 10. Сколько существует тактов работы тиристорного ведомого сетью инвертора, в какие такты преобразователь работает в режиме инвертора, а в какие - в режиме выпрямителя.
Приобретенные навыки - Уметь работать с компьютерной моделью АИР в составе лабораторного комплекса по энергетической электронике. - Уметь входить в программный лабораторный комплекс по энергетической электронике, выбирать нужный вид компьютерной модели преобразователя и выходить из программного комплекса. - Научиться строить и анализировать характеристики АИР; - Научиться делать выводы при анализе работы АИР.
Меры безопасности - Перед началом работы убедиться в надежности заземления компьютера. - При появлении боли в глазах или ухудшении самочувствия от работы с компьютером необходимо сделать перерыв не менее чем на 10 минут или совсем прекратить выполнение работы.
7.8.4. Принцип работы. Принцип работы описан в § 3.15
Содержание отчета. - схему последовательного АИР; - временные диаграммы для двух вариантов преобразователя; - таблица 6.11; - графики снятых зависимостей; - выводы.
7.8.8. Контрольные вопросы 1. Каково назначение последовательного резонансного автономного инвертора? 2. Почему происходит отдача энергии источника Е в сеть переменного тока? 3. За счет чего обеспечиваются условия закрывания и открывания тиристоров? 4. Как противо - ЭДС влияет на ток потребляемый из сети постоянного тока? 5. Какой вид коммутации используется в резонансном автономном инверторе? 6. Почему в резонансных инверторах используются тиристиры, а не электромеханические ключи? 7. Напряжение какой сети (постоянного или переменного тока) влияет на величину противо-ЭДС инвертора?
Практикум по решению задач Основы энергетической электроники
Учебное пособие
Йошкар-Ола 2003
Министерство образования Российской Федерации
МАРИЙСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
И.И. Попов
ОСНОВЫ ЭНЕРГЕТИЧЕСКОЙ ЭЛЕКТРОНИКИ
Рекомендовано УМО по образованию в области энергетики и электротехники в качестве учебного пособия для студентов электроэнергетических специальностей высших учебных заведений
Йошкар-Ола 2003
УДК 62 50 + 681. 3/075 Рецензенты: профессор Марийского государственного технического университета, д.т.н. А. Н. Соболев профессор Марийского государственного университета, д. ф.-м.н. А. А. Косов |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-04-10; Просмотров: 440; Нарушение авторского права страницы
 ·sin u (0< u < p)
·sin u (0< u < p) d
d  =Udm/π =U2m /π (3.2)
=Udm/π =U2m /π (3.2) =
=  =U2m/(2Rd) (3.4)
=U2m/(2Rd) (3.4)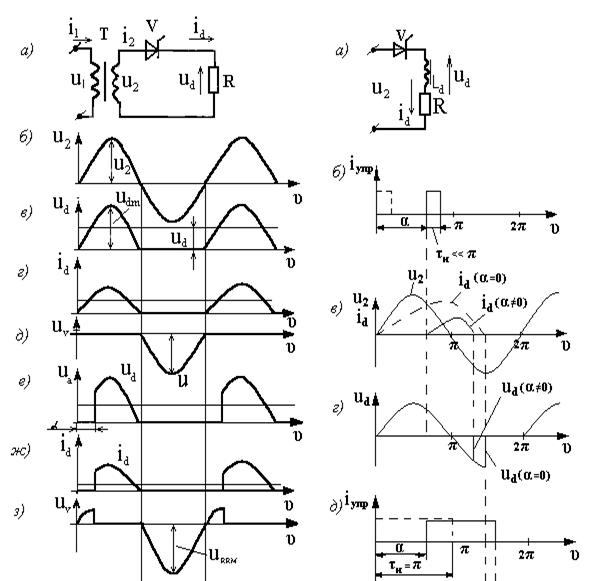
 =
=  (1+ cos a) =
(1+ cos a) =  (1+ cosa) (3.6)
(1+ cosa) (3.6) U2m sin
U2m sin  d
d  d
d  =2·
=2·  U2/π ≈ 0.9U2 (3.9)
U2/π ≈ 0.9U2 (3.9) Udi 0 = 1.1·Udi 0 (3.10)
Udi 0 = 1.1·Udi 0 (3.10)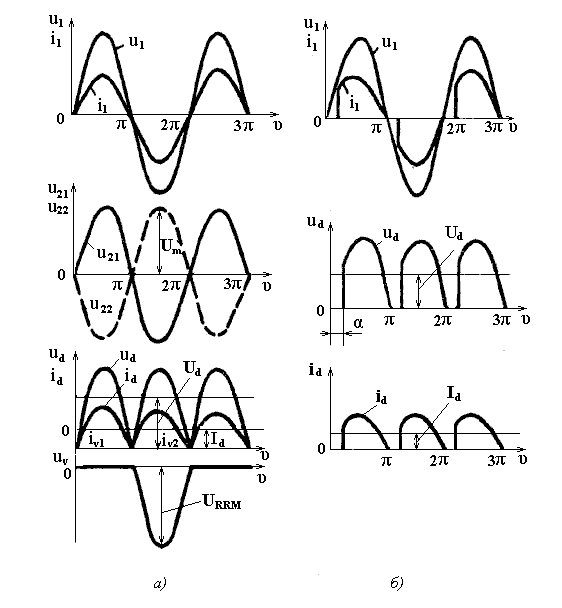
 U2 = p Udi 0 (3.12)
U2 = p Udi 0 (3.12) =
=  Id (3.13)
Id (3.13) U2 =
U2 =  Id (3.14)
Id (3.14) =
=  Id (3.15)
Id (3.15) (3.73)
(3.73) 1) напряжение на конденсаторе Uсm > E, в связи с чем к проводящим вентилям (VS1,VS4) прикладывается запирающее обратное напряжение, равное (Ucm -Е)/2 (рис. 3.37, е), удерживающие закрывшийся вентиль в запертом состоянии, пока действует управляющий импульс. Длительность перезарядных процессов, равная половине периода собственных колебаний контура Т/2-th, определяет длительности открытого состояния вентиля и двуполярных импульсов кривой напряжения инвертора uН. Необходимое различие в частотах ω0 и ωp подчиняются условию поддержания на проводивших вентилях требуемой длительности обратного напряжения с целью их запирания:
1) напряжение на конденсаторе Uсm > E, в связи с чем к проводящим вентилям (VS1,VS4) прикладывается запирающее обратное напряжение, равное (Ucm -Е)/2 (рис. 3.37, е), удерживающие закрывшийся вентиль в запертом состоянии, пока действует управляющий импульс. Длительность перезарядных процессов, равная половине периода собственных колебаний контура Т/2-th, определяет длительности открытого состояния вентиля и двуполярных импульсов кривой напряжения инвертора uН. Необходимое различие в частотах ω0 и ωp подчиняются условию поддержания на проводивших вентилях требуемой длительности обратного напряжения с целью их запирания: (3.74)
(3.74) (3.75)
(3.75) (3.76)
(3.76)

 (3.78)
(3.78)



 (3.82)
(3.82) = i1. Значение тока
= i1. Значение тока 
 увеличивается в течение времени tз1, одновременно растет противо-ЭДС в активно-индуктивной нагрузке. Во время tз2 тиристоры VS1 и VS4 выключаются, а тиристиры VS2 и VS3 включаются. При этом ток от источника U1 через тиристиры VS2 и VS3 не течет, так как его направление противоположно току
увеличивается в течение времени tз1, одновременно растет противо-ЭДС в активно-индуктивной нагрузке. Во время tз2 тиристоры VS1 и VS4 выключаются, а тиристиры VS2 и VS3 включаются. При этом ток от источника U1 через тиристиры VS2 и VS3 не течет, так как его направление противоположно току  , создаваемому накопленной в ZН энергией, протекающему под действием противо-ЭДС нагрузки. Ток
, создаваемому накопленной в ZН энергией, протекающему под действием противо-ЭДС нагрузки. Ток  никогда не успеет уменьшиться до нуля, т.е. полярность напряжения и тока нагрузки всегда будет положительной (от клеммы «А» нагрузки к клемме «В»). Суммарный ток нагрузки будет равен сумме токов
никогда не успеет уменьшиться до нуля, т.е. полярность напряжения и тока нагрузки всегда будет положительной (от клеммы «А» нагрузки к клемме «В»). Суммарный ток нагрузки будет равен сумме токов  и
и 






 , повторяющиеся с частотой питающей сети (см. рис. 4.1). Если при анализе кривой рис. 4.1 за начало отсчета времени принимается середина импульса, то функция
, повторяющиеся с частотой питающей сети (см. рис. 4.1). Если при анализе кривой рис. 4.1 за начало отсчета времени принимается середина импульса, то функция  является четной и ряд Фурье имеет лишь косинусные составляющие с коэффициентами:
является четной и ряд Фурье имеет лишь косинусные составляющие с коэффициентами: (4.1)
(4.1) (4.2)
(4.2) , то его разложение в ряд Фурье определяется (с учетом
, то его разложение в ряд Фурье определяется (с учетом  ) выражением:
) выражением: (4.3)
(4.3)  , дает:
, дает: (4.4)
(4.4) ±1, где k =1,2,3…. (4.5)
±1, где k =1,2,3…. (4.5) (4.8)
(4.8)
 (4.9)
(4.9)  (4.10)
(4.10) (4.11)
(4.11) (4.12)
(4.12) (4.13)
(4.13)

 , коэффициента не синусоидальности кривой напряжения К HCU и коэффициента n-й гармонической составляющей напряжения К U n
, коэффициента не синусоидальности кривой напряжения К HCU и коэффициента n-й гармонической составляющей напряжения К U n


 ·100% , (4.25)
·100% , (4.25) % , (4.26)
% , (4.26)
 (4.27)
(4.27) 
 =42A. (6.2)
=42A. (6.2)
 (6.4)
(6.4)