|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ИЗУЧЕНИЕ И РАСЧЕТ МЕХАНИЗМА ПОДЪЕМА КРАНА. Ч. 2
Цель работы Изучение методики расчета и подбора основных элементов крановой лебедки (электродвигателя, редуктора, соединительной муфты, тормоза).
Формируемые компетенции ПК-4: готовность к разработке проектной и технологической документации по ремонту, модернизации и модификации ТиТТМ различного назначения и ТО, разработке проектной документации по строительству и реконструкции транспортных предприятий, с использованием методов расчетного обоснования, в том числе с использованием универсальных и специализированных программно-вычислительных комплексов и систем автоматизированного проектирования. ПК-31: готовность к использованию знания рабочих процессов, принципов и особенностей работы транспортных и ТиТТМ отрасли и применяемого при технической эксплуатации и сервисном обслуживании оборудования. ПК-32: готовность к использованию знания организационно-правовых основ управленческой и предпринимательской деятельности.
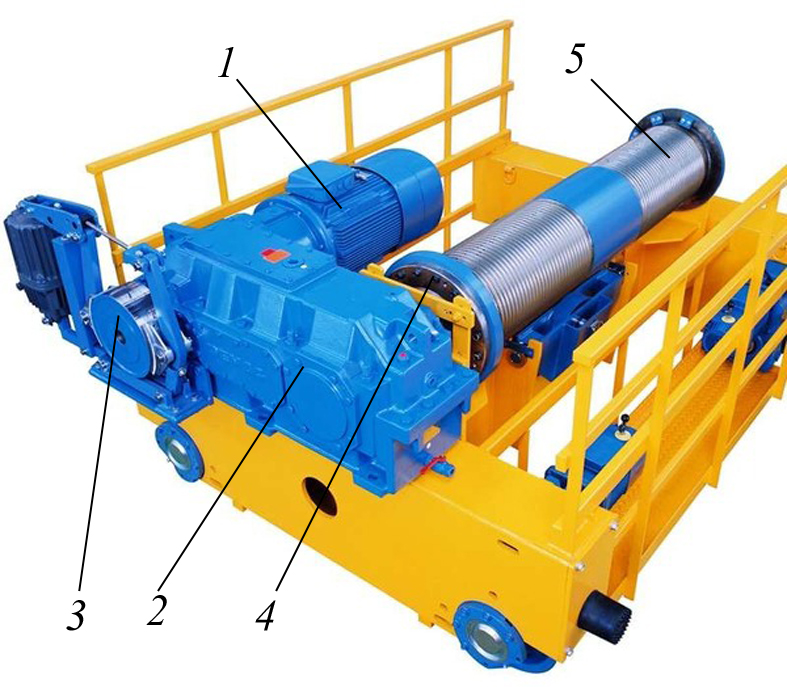
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ В состав механизма подъем крана, помимо полиспаста, включающего систему подвижных и неподвижных блоков, барабана, связанных общей гибкой связью (канатом), входит дополнительный механизм – грузовая лебедка. На рисунке 6.1 показана конструкция и основные элементы лебедки мостового крана. В этой связи в задачу расчета механизма подъема входит определение параметров и выбор стандартного электродвигателя, редуктора, соединительных муфт и тормоза.
Рисунок 6.1 – Грузовая лебедка мостового крана: 1 – электродвигатель; 2 – редуктор; 3 – колодочный тормоз; 4 – соединительная муфта; 5 – барабан
Выбор электродвигателя
Для электродвигателей в качестве характеристики режима работы используется величина относительной продолжительности включений ПВ % (частота включений в единицу времени). В таблице 6.1 показано соответствие групп режима работы механизма по ГОСТ 25835-85 и ИСО 4301/1 и относительной продолжительностью включения электрооборудования. Таблица 6.1 – Соответствие групп режимов работы механизмов и ПВ %
Статическая мощность Рс электродвигателя механизма подъема определяется по формуле
где ηм – КПД механизма подъема груза, ориентировочно принимается ηм = 0,8…0,85.
С учетом полученного значения подбирается стандартный крановый электродвигатель номинальной мощностью равной или на 30…35 % меньше Рс . Наиболее распространенными для механизма подъема груза являются крановые электродвигатели с фазным ротором серии MTF, основные характеристики и размеры которых приведены в таблице П.6.
Выбор редуктора
Основными характеристиками редуктора являются: передаточное число, допускаемый вращающий момент или мощность на тихоходном валу и частота вращения быстроходного вала. Частота вращения барабана определяется по выражению
Требуемое передаточное число редуктора
где n дв – частота вращения вала электродвигателя. Ориентировочная величина требуемого вращающего момента на тихоходном валу (без учета потерь на трение в редукторе)
Для механизмов подъема груза используются в основном двух-ступенчатые цилиндрические горизонтальные редукторы типа Ц2, Ц2У, Ц2Н и реже трехступенчатые редукторы типа Ц3 (если требуется иметь большое передаточное число). Основные характеристики редукторов типа Ц2 приведены в таблице П.7.
|
Последнее изменение этой страницы: 2019-04-10; Просмотров: 286; Нарушение авторского права страницы