
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Предмет изучения теории управления и радиоавтоматикиСтр 1 из 28Следующая ⇒
Введение Предмет изучения теории управления и радиоавтоматики
Одними из первых автоматические регуляторы были использованы в поплавковых регуляторах парового котла И.И. Ползунова (1765 г.) и затем в регуляторах скорости вращения машин Дж. Уатта (1784 г.). Все последующие годы работы велись по улучшению основных характеристик автоматических механизмов. Однако в 1876 году петербургский профессор И.А. Вышнеградский отметил, что увеличение точности работы механизмов ведет к его неустойчивой работе в динамическом режиме. Позднее он сформулировал критерий устойчивости систем третьего порядка. В радиотехнике системы автоматического регулирования были использованы в устройствах автоматической регулировки усиления в первых радиоприемниках. Радиоавтоматика (РА) как самостоятельный класс в науке обязана появлению такой науке как кибернетика. Выделение систем РА в самостоятельный класс обусловлено также и их особенностями, связанными с условиями работы в составе радиотехнических систем и систем радиоуправления. К особенностям работы данных систем относятся и обработка радиосигнала при действии различного рода помех. Надежность и качество работы систем РА определяет качество работы радиоаппаратуры и систем радиоуправления. В современных радиотехнических устройствах различного назначения и системах радиоуправления широко используются автоматические системы, которые называются системами радиоавтоматики (системами РА). К числу таких систем относятся устройства фазовой (ФАПЧ) и частотной (АПЧ) автоподстройки частоты, автоматической регулировки усиления (АРУ), системы измерения координат движущихся объектов, измерители дальности, различные следящие системы устройств и систем радиоуправления. Изложение основ построения, метода анализа и проектирования систем радиоавтоматики применительно к радиотехническим устройствам и системам является основной задачей данного учебного пособия. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ И ПЕРЕДАТОЧНЫЕ ФУНКЦИИ СИСТЕМ РАДИОАВТОМАТИКИ Выходной сигнал системы радиоавтоматики при произвольном воздействии
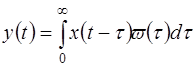
Из определения передаточной функции системы РА следует, что преобразования Лапласа для выходного сигнала при нулевых начальных условиях Y(p)=W(p) X(p). На основании теоремы свертки сигнал на выходе будет иметь вид
В нестационарных системах РА сигнал на выходе определяется как
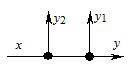
где t0 – время подачи входного сигнала. Выражения (3.20) и (3.21) позволяют определить выходной сигнал системы РА при произвольном виде входных сигналов. ЭЛЕМЕНТЫ СИСТЕМ РАДИОАВТОМАТИКИ И ТИПОВЫЕ РАДИОТЕХНИЧЕСКИЕ ЗВЕНЬЯ Элементы систем радиоавтоматики Фазовые детекторы Фазовым детектором (ФД) называют устройство (рис. 4.1), предназначенное для преобразования разности фаз двух синусоидальных колебаний одинаковой частоты в напряжение. Основной характеристикой ФД является зависимость выходного напряжения от разности фаз Uфд=F(j), где j = j1 + j 2 – разность сравниваемых фаз напряжений. Функция F периодическая, так что Uфд=F(j +k2p), k = 0, 1, 2, …
Рис. 4.1 - Функциональная схема фазового детектора
В системах РА применяются ФД двух типов: балансные (векторомерные) и параметрические. Наиболее часто используют балансные ФД, которые эффективно работают в области низких и высоких частот. Напряжение на выходе балансного ФД образуется из векторной суммы и разности двух напряжений: опорного u1(t)=u1 sin w t и сигнала u2(t)=u2 sin (w t+ j). (4.3) Сумма и разность этих напряжений определяется выражениями
где
В статическом режиме напряжение на выходе ФД (рис. 4.2) определяется выражением
где kфд – коэффициент детектирования. При
Выражение (4.4) приближенное, при U1 = 5×U2 максимальная ошибка не превышает двух процентов.
Рис. 4.2 - Дискриминационная характеристика фазового детектора
В соответствии с (4.2) линеаризованное нелинейное уравнение (4.4) будет иметь вид
где j0 – значение фазы в установившемся режиме. При малых отклонениях фазы от j0 приращение напряжения на выходе ФД
kфд = – k sin j0 – коэффициент передачи ФД. Из последнего выражения следует, что передаточная функция ФД Wфд(p)=kфд. Если учесть инерционность детекторов, то передаточная функция ФД будет иметь вид
где Tфд – постоянная времени ФД. В параметрических ФД зависимость выходного напряжения от сдвига фаз аналогичная выражению (4.4).
Частотные дискриминаторы
Дискриминаторы предназначены для измерения сигнала рассогласования и преобразования его в постоянное или переменное напряжение. Различают частотные и временные дискриминаторы. Частотные дискриминаторы (ЧД) – это устройства, выходные напряжения которых зависят от переходной частоты w0: uчд=F(w – w0). По способу задания переходной частоты ЧД подразделяют на две группы. В дискриминаторах первой группы переходная частота определяется настройкой эталонного фильтра (колебательного контура). В ЧД второй группы переходная частота равна частоте колебаний напряжения с эталонного генератора. Наиболее часто используют первую группу дискриминаторов с фазовым детектором (рис. 4.3), где ФВ – фазовращатель, сдвигающий фазу сигнала на p/2; Ф – резонансный фильтр. В таком ЧД входной сигнал разделяется на две составляющие u1 и u2, сдвиг фаз между которыми при точной настройке контура на переходную частоту равен p/2. При отклонении частоты входного сигнала от переходной частоты сдвиг фаз изменяется в соответствии с фазовой характеристикой резонансного контура. В результате чего изменяется напряжение на выходе ЧД.
Рис. 4.3 - Функциональная схема частотного дискриминатора
Непосредственно из схемы (рис. 4.3) следует, что на ФД подаются напряжения
где D w – отклонение частоты напряжения от переходной частоты; jф(D w) – фазовый сдвиг, создаваемый фильтром; |Wф(j D w)| – амплитудно-частотная характеристика фильтра. В соответствии с выражением (4.4) напряжение на выходе ЧД будет иметь вид
Выражение (4.6) определяет дискриминационную характеристику ЧД. Обычно используется нормированная характеристика Wчд(p)=kчд.
Рис. 4.4 - Дискриминационная характеристика частотного дискриминатора
Выражение для передаточной функции справедливо для линейного участка детекторной характеристики, т.е. когда полоса пропускания частотного дискриминатора больше эффективной ширины спектра его входного сигнала, в противном случае необходимо учитывать инерционность ЧД, которая определяется постоянной времени детектора.
Угловые дискриминаторы Угловые дискриминаторы (пеленгаторы) используются в системах автоматического сопровождения по направлению для измерения рассогласования между продольной осью антенны РЛС и направлением на движущуюся цель и преобразования этого рассогласования в электрическое напряжение. Различают два вида угловых дискриминаторов: с коническим сканированием диаграммы направленности (с последовательным сравнением сигналов) и моноимпульсные (с мгновенным сравнением сигналов). В дискриминаторе с коническим сканированием антенной РЛС формируется одна сканирующая (вращающаяся) диаграмма направленности, максимум которой смещен от продольной оси антенны (рис. 4.5). Если направление на цель (НЦ) совпадает с продольной осью 0XA, то цель облучается импульсами одной и той же мощности, поэтому амплитуда отраженных от нее импульсов будет постоянной. Если направление на цель не совпадает с продольной осью антенны, то в моменты времени, разделенные интервалом времени, равном половине периода сканирования, отраженные от цели импульсы будут иметь различные амплитуды, т.е. будет осуществляться модуляция отраженного сигнала по амплитуде с частотой сканирования. При небольших отклонениях направления на цель от продольной оси антенны модуляция будет линейной:
где E(t) – амплитуда отраженного от цели сигнала и принятого в момент времени t; E0 – средняя амплитуда импульсов за период сканирования; ks – постоянный коэффициент; wск – частота сканирования; e – угловое рассогласование. Значение e характеризует отклонение направления на цель; j – знак этого отклонения. Если j = 0 при t = 0 (рис. 4.5, б), то можно записать, что
Сигнал E(t) подается на два фазовых детектора. Опорными напряжениями являются два синусоидальных напряжения, сдвинутых относительно друг друга на 900. Опорные напряжения снимаются с генератора, кинематически связанного с устройством вращения диаграммы направленности так, что частота вращения диаграммы направленности и генератора опорных напряжений одна и та же. Временные дискриминаторы
Временные дискриминаторы предназначены для измерения временных рассогласований между отраженными от цели и зондирующими импульсами и преобразования рассогласования в пропорциональное значение напряжения. Принцип работы временного дискриминатора рассмотрен в разделе 2.5, поэтому мы только проведем анализ связи выходного сигнала дискриминатора с входным сигналом, которым является временное рассогласование D t (рис. 2.18). Временное рассогласование равно разности времени задержки следящих импульсов D tи. Во временном дискриминаторе вырабатываются два импульса, длительности которых определяются выражениями (2.24). После сглаживания этих импульсов образуется усредненная разность напряжений
где U0 – амплитуда импульсов. Выражение (4.12) справедливо при условии, что
Рис. 4.7 - Дискриминационная характеристика временного дискриминатора
Система работает в условиях действия помех, поэтому при анализе их влияния на качественные характеристики системы необходимо учитывать нелинейную характеристику дискриминатора.
Исполнительные устройства
В системах РА используются различные исполнительные устройства, предназначенные для регулирования электрических сигналов, в качестве исполнительных устройств в системах РА используются электронные приборы. Для управления механическими устройствами используются электрические двигатели постоянного или переменного тока. Качество работы исполнительного устройства определяется его регулировочной характеристикой. Регулировочная характеристика (РХ) – это зависимость управляемого параметра исполнительного устройства от управляющего воздействия. В системах АРУ устройством управления являются усилители с изменяемым коэффициентом усиления, а управляемым параметром – коэффициент усиления (рис. 4.8, а). В системах ФАПЧ исполнительным устройством – генератор, а управляемый параметр – частота генерации (рис. 4.8, б).
Рис. 4.8 - Регулировочные характеристики регулируемых усилителей (а) и генераторов (б)
Аналитически РХ регулируемых усилителей и генераторов в пределах
где Sу – крутизна РХ, определяемая на середине линейного участка ( Таким образом, основными параметрами РХ электронных приборов являются: 1) крутизна регулирования Sу; 2) диапазон управляющих воздействий 3) глубина регулирования q. В регулируемых усилителях глубина регулирования оценивается отношением
а в перестраиваемых генераторах отношением
В системах управления антеннами РЛС используются электрические двигатели постоянного и переменного тока (рис. 4.9, а), электромагнитные порошковые муфты и другие устройства. При использовании двигателя постоянного тока, работающего на некоторую нагрузку (Н), на обмотку возбуждения подается постоянное напряжение с источника постоянного тока и на обмотку якоря (Я) подается управляющее напряжение с усилителя мощности. Напряжение на обмотке якоря является входным сигналом двигателя, а угол поворота якоря выходным сигналом двигателя. Зависимость частоты вращения якоря W двигателя от входного напряжения и называют регулировочной характеристикой (рис. 4.9).

Рис. 4.9 - Схема (а) и регулировочная характеристика (б) электрического двигателя постоянного тока
Передаточная функция двигателя определяется следующим выражением:
где j(p) – преобразование Лапласа для угла отклонения якоря; U(p) – преобразование Лапласа для отклонения напряжения на обмотке якоря от установившегося значения. Коэффициент передачи kдв и электромеханическая постоянная времени Tм двигателя определяются опытным путем. Для нахождения коэффициента передачи необходимо снять регулировочную характеристику, угол наклона касательной к которой, проведенной в точке, соответствующей установившемуся режиму работы двигателя, позволяет найти коэффициент передачи. Для измерения электромеханической постоянной времени Tм необходимо снять осциллограмму изменения частоты вращения двигателя при скачкообразном изменении напряжения на обмотке якоря. Для этого нужно зарегистрировать напряжение с какого-либо датчика частоты вращения, механически соединенного с якорем двигателя. Время, в течение которого частота вращения двигателя изменится на значение, равное 0,63 от установившегося значения, равно электромеханической постоянной времени. Передаточные функции электрических двигателей переменного тока также описываются выражением (4.15). Исполнительные устройства с электромагнитными муфтами рассмотрены в [6]. Тип звена | Дифференциальное уравнение | Передаточная функция W=W(p) | ||||||
| Позиционные звенья | Идеальное усилительное (безынерционное) | 
| 
| |||||
| Апериодическое (инерционное) | 
| 
| ||||||
| Апериодическое (инерционное) второго порядка |  , где , где 
|   , где , где 
| ||||||
| Колебательное |  , где , где 
| 
| ||||||
| Консервативное | 
| 
| ||||||
| Интегрирующее | Интегрирующее идеальное | 
| 
| |||||
| Интегрирующее инерционное | 
| 
| ||||||
| Изодромное | 
|  , где k1=k t , где k1=k t
| ||||||
|  , где , где
|   ,
где k1 = 2k x t; k2 = k t2; ,
где k1 = 2k x t; k2 = k t2;
| ||||||
| Дифференцирующее | Дифференцирующее идеальное | 
| 
| |||||
| Дифференцирующее инерционное | 
| 
| ||||||
| Форсирующее идеальное | 
| 
| ||||||
| Форсирующее идеальное второго порядка |  , где , где 
| 
| ||||||

| 
|
Примечание: обозначения, принятые в таблице 4.1: k – коэффициент усиления; T, t – постоянные времени; x – коэффициент демпфирования (относительный коэффициент затухания); p – оператор Лапласа и дифференцирования.
Позиционные звенья, кроме консервативного, характеризуются тем, что в каждом из них при подаче на вход постоянной величины с течением времени устанавливается постоянное значение выходной величины. Отношение установившихся значений выходной и входной величин называют передаточным коэффициентом k звена.
В безынерционном (идеальном) звене при скачкообразном изменении входной величины мгновенно без какого-либо запаздывания изменяется и выходная величина – переходного процесса нет. В апериодическом звене выходная величина нарастает монотонно. Продолжительность переходного процесса зависит от второго параметра звена, называемого постоянной времени T. Чем больше постоянная времени, тем медленнее протекает переходной процесс.
В апериодическом звене второго порядка переходной процесс также монотонный, но его продолжительность зависит от двух постоянных времени T1, T2.
Выходная величина колебательного звена в переходном процессе совершает колебания около того значения, которое должно установиться. Затухание колебаний зависит от значения третьего параметра звена, называемого коэффициентом демпфирования x, который лежит в пределах от нуля до единицы. Чем больше x, тем меньше отклонения и тем быстрее заканчивается переходной процесс.
Консервативное звено есть вырожденный случай колебательного звена (x= 0). Возникшие в нем колебания не затухают. Передаточный коэффициент k указывает отношение амплитуды гармонических колебаний выходной величины к постоянной входной величине.
Интегрирующие звенья характеризуются тем, что при постоянном входном воздействии выходная величина неограниченно растет. У идеального интегрирующего звена передаточный коэффициент k определяет скорость этого роста. У реального интегрирующего звена такой режим устанавливается позднее и зависит от постоянной времени T.
В изодромных звеньях имеет место некоторый начальный скачок выходной величины и затем ее неограниченное нарастание. Передаточный коэффициент k изодромного звена первого порядка определяет скорость последующего нарастания выходной величины, а изодромного звена второго порядка – постоянное ускорение, с которым нарастает выходная величина.
Дифференцирующие звенья реагируют лишь на изменения входной величины. Например, если входная величина идеального дифференцирующего звена нарастает с постоянной скоростью, то выходная величина удерживается на постоянном уровне, пропорциональном этой скорости.
В природе идеальных дифференцирующих звеньев нет – они всегда имеют некоторую (хотя бы и очень малую) инерционность. При линейном нарастании входной величины реального дифференцирующего звена постоянное значение его выходной величины устанавливается не сразу, а тем позже, чем больше постоянная времени T.
Форсирующие звенья сочетают в себе свойства позиционного и дифференцирующего звеньев.
В инженерной практике при анализе и исследовании систем РА используют семь видов типовых звеньев: безынерционные, инерционные, интегрирующие, колебательные, идеальные дифференцирующие, реальные дифференцирующие первого порядка и звенья запаздывания. Рассмотрим их основные передаточные свойства.
Безынерционное (пропорциональное) звено. К числу таких звеньев относятся устройства с передаточной функцией  , где k – коэффициент передачи звена. Амплитудная и фазочастотная характеристики звена:
, где k – коэффициент передачи звена. Амплитудная и фазочастотная характеристики звена:  ,
,  ; переходная функция
; переходная функция  . ЛАЧХ и фазовая частотная характеристика звена не зависит от частоты (рис. 4.10).
. ЛАЧХ и фазовая частотная характеристика звена не зависит от частоты (рис. 4.10).
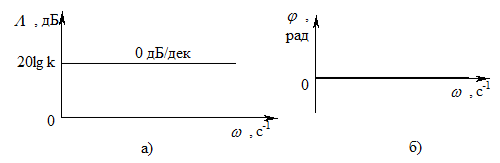
Рис. 4.10 - Логарифмические амплитудная (а) и фазовая (б) частотные
характеристики безынерционного звена
Примерами таких звеньев являются потенциометр, полупроводниковый усилитель, операционный усилитель, зубчатая передача и т.п.
Инерционное (апериодическое) звено. К подобным звеньям относятся устройства с передаточной функцией
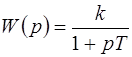 . (4.17)
. (4.17)
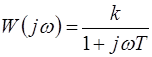
Пример инерционного звена – RC-цепочка (рис. 4.11, а). Частотная характеристика инерционного звена имеет вид
 .
.
Рис. 4.11 - Схема (а) и годограф (б) RC-цепи инерционного звена
Вещественная и мнимая частотные характеристики:
 ;
;  ;
;
амплитудная и фазовая характеристики:
 ;
;  . (4.18)
. (4.18)
Годограф инерционного звена (рис. 4.11, б) имеет сопрягающую частоту wс =1/T .
Переходная функция звена находится по формуле (3.10) и имеет вид
 .
.
Импульсная переходная функция находится по формуле (3.16).
Логарифмическая частотная характеристика инерционного звена в соответствии с выражением (3.29) и (4.18) имеет вид
 . (4.19)
. (4.19)
Предварительно построим приближенную характеристику в диапазоне частот от 0 до сопрягающей частоты wс=1/Т, пренебрегая в (4.19) слагаемым, зависящим от частоты (оно меньше единицы), получим  . Этому выражению соответствует прямая линия, параллельная оси частот (рис. 4.12, а). На частотах больших сопрягающей частоты wс пренебрежем единицей. Тогда (4.19) будет иметь вид
. Этому выражению соответствует прямая линия, параллельная оси частот (рис. 4.12, а). На частотах больших сопрягающей частоты wс пренебрежем единицей. Тогда (4.19) будет иметь вид  . Так как частота по оси абсцисс откладывается в логарифмическом масштабе, то этому выражению соответствует прямая линия с наклоном –20 дБ/дек.
. Так как частота по оси абсцисс откладывается в логарифмическом масштабе, то этому выражению соответствует прямая линия с наклоном –20 дБ/дек.
Характеристику, составленную из прямых отрезков L1 и L2, называют асимптотической. Наибольшее отклонение асимптотической характеристики от точной получается на сопрягающей частоте; оно равно – 3 дБ. На частотах, отличающихся от сопрягающей на одну октаву, отклонение составляет –1 дБ.
Логарифмическую фазочастотную характеристику (рис. 4.12, б) строят в соответствии с выражением (4.18).
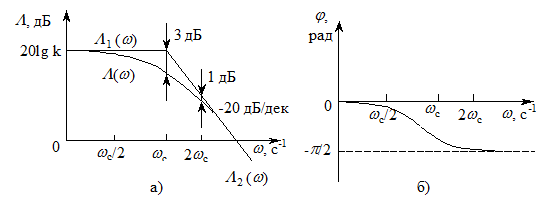
Рис. 4.12 - Логарифмическая амплитудночастотная (а) и фазочастотная (б) характеристики инерционного звена
Интегрирующее звено. К числу таких звеньев относятся устройства с передаточной функцией
 . (4.20)
. (4.20)
Годограф интегрирующего звена приведен на рис. 4.13.
Примеры интегрирующего звена: электрический двигатель с передаточной функцией (4.15), если в ней пренебречь электромеханической постоянной времени; усилитель постоянного тока с большим коэффициентом усиления, в цепь обратной связи которого включен конденсатор.
Вещественная, мнимая и частотные характеристики интегрирующего звена имеют вид:
 ;
; 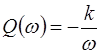 ,
,
амплитудная и фазовая характеристики:
 ;
;  . (4. 21)
. (4. 21)
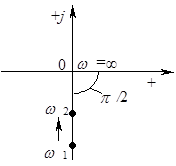
Рис. 4.13 - Годограф частотной характеристики
интегрирующего звена
Логарифмическая АЧХ звена с учетом (3.29) и (4.21) определяется выражением  .
.
Этому уравнению соответствует прямая линия с наклоном –20 дБ/дек (рис. 4.14, а). Логарифмическая ФЧХ (4.21) не зависит от частоты и равна –p/2 (рис. 4.14, б).
Рис. 4.14 - Логарифмическая (а) и фазовая (б) частотная
характеристика интегрирующего звена
Колебательное звено. Передаточная функция звена имеет вид
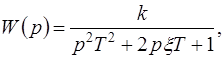 (4.22)
(4.22)
где x – относительный коэффициент затухания.
Примером колебательного звена является контур, состоящий из индуктивной катушки, резистора и конденсатора (рис. 4.15, а).
Рис. 4.15 - Схема (а) и годограф частотной характеристики (б)
колебательного звена
Амплитудная и фазовая частотные характеристики колебательного звена соответственно имеют вид:
 (4.23)
(4.23)
Переходная функция звена в соответствии с (3.10)
 ,
,
где  .
.
Если x > 1, то полюсы передаточной функции (4.22) – отрицательные действительные числа, поэтому передаточную функцию звена можно представить в виде
 ,
,
где T1 = 1/l1; T2 = 1/l2.
С учетом (3.29) ЛАЧХ колебательного звена будет определяться выражением
 .
.
Приближенная характеристика звена состоит из двух участков. На участке до сопряженной частоты  с наклоном 0 дБ/дек, в диапазоне частот больше сопряженной
с наклоном 0 дБ/дек, в диапазоне частот больше сопряженной  с наклоном –40 дБ/дек (рис. 4.16).
с наклоном –40 дБ/дек (рис. 4.16).
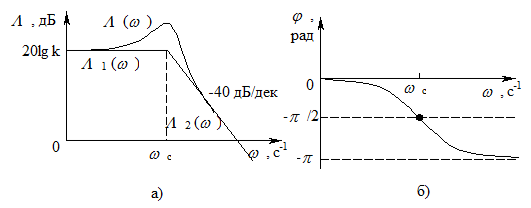
Рис. 4.16 - Логарифмическая (а) и фазовая (б) частотная
характеристика инерционного звена
Максимальное отклонение точной характеристики от приближенной получается на сопряженной частоте и равно – 20 lgx. Уточнение приближенной характеристики производится расчетным путем. Логарифмическую ФЧХ строят в соответствии с выражением (4.23).
Идеальное дифференцирующее звено. Передаточная функция звена  не удовлетворяет условию физической реализуемости, поэтому звено называют идеальным. Годограф звена изображен на рис. 4.17. Частотные характеристики звена имеют вид
не удовлетворяет условию физической реализуемости, поэтому звено называют идеальным. Годограф звена изображен на рис. 4.17. Частотные характеристики звена имеют вид
 ;
;  . (4.24)
. (4.24)
Рис. 4.17 - Годограф частотной характеристики идеального
дифференцирующего звена
Переходная функция звена имеет вид  , где
, где  – дельта-функция.
– дельта-функция.
Логарифмическая АЧХ звена в соответствии с (3.29) и (4.24) определяется как

Этому уравнению соответствует прямая линия с наклоном + 20 дБ/дек (рис. 4.18, а). Логарифмическая ФЧХ (4.21) не зависит от частоты и равна + p/2 (рис. 4.18, б).
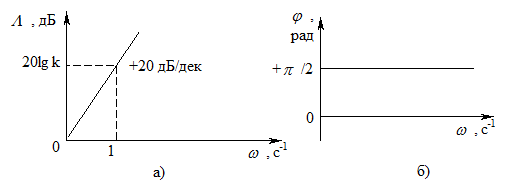
Рис. 4.18 - Логарифмическая (а) и фазовая (б) частотная характеристика идеального дифференцирующего звена
Дифференцирующее звено первого порядка. Передаточная функция звена дифференцирующего (форсирующего) звена имеет вид  (рис. 4.19), а частотная и фазовая характеристики соответственно:
(рис. 4.19), а частотная и фазовая характеристики соответственно:
 ;
;  (4.25)
(4.25)
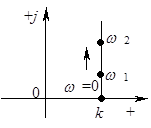
Рис. 4.19 - Годограф частотной характеристики дифференцирующего
звена первого порядка
Переходная функция звена имеет вид  , где - дельта функция.
, где - дельта функция.
Логарифмическая частотная характеристика форсирующего звена в соответствии с выражением (3.29) и (4.25) имеет вид
 . (4.26)
. (4.26)
Приближенная характеристика форсирующего звена в диапазоне частот от 0 до сопряженной частоты wс=1/Т имеет вид 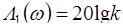 . Этому выражению соответствует прямая линия, параллельная оси частот (рис. 4.20, а). На частотах больших сопряженной частоты wс, пренебрегая единицей, характеристика (4.26) будет иметь вид
. Этому выражению соответствует прямая линия, параллельная оси частот (рис. 4.20, а). На частотах больших сопряженной частоты wс, пренебрегая единицей, характеристика (4.26) будет иметь вид  . Так как частота по оси абсцисс откладывается в логарифмическом масштабе, то этому выражению соответствует прямая линия с наклоном –20 дБ/дек.
. Так как частота по оси абсцисс откладывается в логарифмическом масштабе, то этому выражению соответствует прямая линия с наклоном –20 дБ/дек.
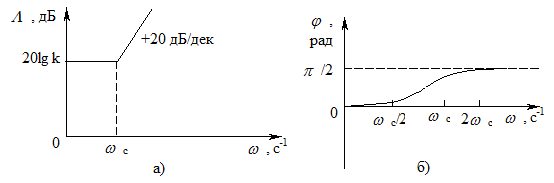
Рис. 4.20 - Логарифмическая (а) и фазовая (б) частотная характеристика дифференцирующего звена первого порядка
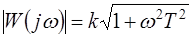
Звено запаздывания. Это звено используется для моделирования сдвига входного сигнала во времени, не искажая его ЛАЧХ и фазочастотной характеристик. Передаточная функция звена имеет вид  , где T – время запаздывания. Частотные характеристики имеют вид
, где T – время запаздывания. Частотные характеристики имеют вид
 ;
;  .
.
Годограф звена запаздывания имеет вид окружности с единичным радиусом (рис. 4.21).
Рис. 4.21 - Годограф частотной характеристики
звена запаздывания
Переходная функция, ЛАЧХ и фазочастотная характеристика звена запаздывания, как отмечалось ранее, не искажают характеристики системы РА в целом.
4.4 Виды соединения типовых радиотехнических звеньев и структурные преобразования сложных схем систем радиоавтоматики
Структурная схема системы РА, состоящая из типовых радиотехнических звеньев, позволяет без сложных математических вычислений определить передаточные функции различных систем РА.
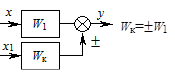
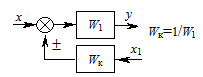
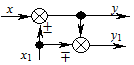
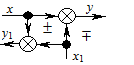
В системах РА используются три вида соединений звеньев: параллельное, последовательное и соединение звеньев по схеме с обратной связью. Основные правила структурного преобразования различных видов соединений звеньев в эквивалентную структурную схему с результирующей передаточной функцией приведены в таблице 4.2 [3].
Для построения логарифмических частотных характеристик необходимо найти амплитудную и фазовую частотные характеристики преобразованной эквивалентной структурной схемы соединенных типовых радиотехнических звеньев.
Таблица 4.1 - Правила структурных преобразований в системах радиоавтоматики
|
| ||||||
| № п/п | Тип преобразования | Исходная структурная схема | Эквивалентная структурная схема | |||
| 1 | Свертывание последовательного соединения звеньев | 
| 
| |||
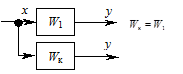
| 2 | Свертывание параллельного соединения звеньев | 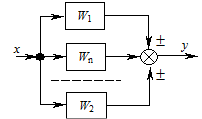
| 
| |||
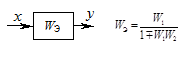
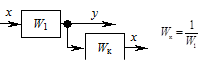
| Свертывание встречно-параллельного соединения звеньев | 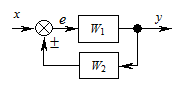
| 
| |||
| 4 | Перенос узла разветв-ления через звено | По направлению передачи сигнала | 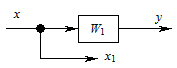
| 
| ||
| Против направления передачи сигнала | 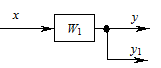
| 
| ||||
| 5 | Перенос сум-матора через звено | По направлению передачи сигнала | 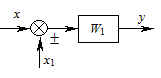
| 
| ||
| Против направления передачи сигнала | 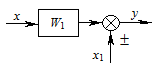
| 
| ||||
| 6 | Перестановка узлов разветвления | 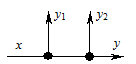
| 
| |||
| 7 | Перестановка сумматоров | 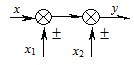
| 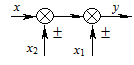
| |||
| Перенос узла разветв-ления через сум-матор | По направлению передачи сигнала | 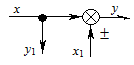
| 
| ||
| Против направления передачи сигнала | 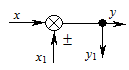
| 
| ||||
Критерии устойчивости
Точно вычислить корни можно лишь для систем не выше 4-го порядка, поэтому были разработаны критерии, которые позволяют оценить устойчивость (то есть отрицательность вещественной части корней) по виду характеристического уравнения системы, или ее частотной характеристике. Их называют критериями устойчивости.
Постановка задачи
Задача проектирования системы РА состоит в выборе структурной схемы параметров и способа технической реализации системы из условия обеспечения требований, которые следуют из назначения проектируемой системы и обеспечения заданных характеристик. Один из возможных способов описания требований к проектируемой системе – задание показателей качества работы системы, таких как статическая, динамическая и среднеквадратическая ошибки системы. Это справедливо, когда известны характеристики системы управляющих и возмущающих воздействий. Детерминированные воздействия должны быть заданы как функции времени или их производные. Для случайных сигналов и помех должны быть известны их корреляционные функции или спектральные плотности. При такой постановке синтез системы сводится к выбору структурной схемы, с помощью которой можно обеспечить заданные показатели качества работы системы РА.
Если характеристики управляющих и возмущающих воздействий известны, то систему РА можно спроектировать как оптимальную, обеспечив минимальное значение суммарной среднеквадратической ошибки. Решить эту задачу позволяет теория оптимальных фильтров Н. Винера и Р. Калмана, которая применима к проектированию оптимальных систем РА. Возможна и иная постановка задачи синтеза оптимальных систем. Наиболее общей является ее постановка с учетом достижения минимума функционала (критерия качества)
 , (7.1)
, (7.1)
где  – квадратичная форма относительно ошибки системы
– квадратичная форма относительно ошибки системы  ;
;  – квадратичная форма относительно сигнала управления
– квадратичная форма относительно сигнала управления  ; T – время работы системы.
; T – время работы системы.
Первая квадратичная форма в функционале (7.1) выбирается из требований, предъявляемых к точности проектируемой системы, вторая учитывает ограничения на сигнал управления. При этом задача оптимального синтеза формулируется следующим образом. Из допустимого множества u(t) необходимо выбрать и технически реализовать такой сигнал управления, который переводит объект управления из начального состояния в конечное и минимизирует функционал (7.1). Для решения таких задач используются методы вариационного исчисления, принцип максимума Л.С. Понтрягина, метод динамического программирования Р. Белмана. Здесь возможны два случая: 1) полностью известна информация о состоянии объекта управления; 2) информация об объекте управления неполная или вообще неизвестна. Во втором случае при синтезе системы возникает дополнительная задача оценки состояния объекта управления, на основании которой формируется оптимальный сигнал управления.
Синтез оптимальных систем из условия минимума функционала (7.1) связан с рядом трудностей. Одна из трудностей состоит в том, что в настоящее время нет каких-либо методов, позволяющих связать коэффициенты квадратичных форм функционала (7.1) a i и qi, с заданными показателями качества работы проектируемой системы. Поэтому в процессе синтеза системы приходится рассчитывать большое число вариантов оптимальных систем с различными видами квадратичных форм и их коэффициентов, объем расчетов при этом может быть весьма значительным. Другая трудность связана с реализацией найденных оптимальных алгоритмов управления, которые получаются особо сложными и могут быть реализованы лишь приближенно. Вследствие отмеченных трудностей методы проектирования оптимальных систем из условия минимума функционала (7.1) в основном используются в научных исследованиях для оценки предельных соотношений и мало пригодны в инженерных задачах проектирования систем РА.
В данной главе рассматривается синтез систем РА из условия обеспечения допустимых ошибок в системе и удовлетворения других показателей качества работы. Такой метод называют динамическим синтезом систем РА.
Помимо требований к качеству функционирования в процессе синтеза систем РА предъявляются требования и к их сложности. Всегда желательно, чтобы спроектированная система была простой, а требования к элементам системы – минимальными. В качестве функционала сложности системы можно применять следующий интеграл [8]:
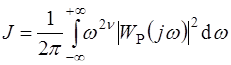 , (7.2)
, (7.2)
где Wp(j w) –частотная характеристика разомкнутой системы; v – порядок астатизма.
Чем меньше значение интеграла (7.2), тем ниже требования к устройствам системы. Помимо требований к качеству работы проектируемой системы РА, к ее сложности предъявляется и ряд требований, связанных с надежностью работы системы, стабильностью ее характеристик при изменении условий окружающей среды, эксплуатацией, массой, габаритами и т.п. В настоящее время теория оптимальных систем не позволяет объединить всю совокупность требований к проектируемой системе в виде единого критерия, поэтому удовлетворение их во многом зависит от опыта и квалификации инженера-исследователя.
Комплексные системы
Системы РА, которые формируются не только на базе радиотехнических устройств, но и на базе устройств других типов (например, гироскопических приборов, инерциальных систем и др.), называют комплексными. Подобные системы широко применяются при навигации для определения координат и параметров движения различных объектов (например, для измерения скорости летательного аппарата и угла сноса относительно расчетной траектории используется гироскопическая система с доплеровским измерителем). Для измерения высоты полета применяются барометрический и радиолокационный высотомеры. Для комплексной системы РА характерно наличие нескольких параллельно работающих каналов с различными датчиками измерения одной и той же информации. На рис. 7.11 показана типовая структурная схема комплексной измерительной системы, в которой входной сигнал  измеряется разнотипными датчиками Д1, Д2, ..., Дn с передаточными функциями Wдi(p), где i=l, 2, ..., n; воздействия Vi(t) учитывают погрешности датчиков. Комплексирование системы заключается в вычислении оценки x(t) с точностью, превышающей достижимую при раздельном использовании датчиков. Из схемы (рис. 7.11) следует, что преобразование Лапласа для оценки входного сигнала будет иметь вид
измеряется разнотипными датчиками Д1, Д2, ..., Дn с передаточными функциями Wдi(p), где i=l, 2, ..., n; воздействия Vi(t) учитывают погрешности датчиков. Комплексирование системы заключается в вычислении оценки x(t) с точностью, превышающей достижимую при раздельном использовании датчиков. Из схемы (рис. 7.11) следует, что преобразование Лапласа для оценки входного сигнала будет иметь вид

Рис. 7.11 - Типовая структурная схема комплексной измерительной
системы РА
 . (7.57)
. (7.57)
Преобразование Лапласа для сигнала ошибки имеет вид
 . (7.58)
. (7.58)
Из последнего выражения следует, что если передаточные функции каналов системы выбирают из условия
 , (7.59)
, (7.59)
то выражения (7.57) и (7.58) принимают вид
 ;
;
 . (7.60)
. (7.60)
Таким образом, ошибка комплексной системы не зависит от характеристик измеряемого сигнала и определяется только погрешностями датчиков.
Равенство (7.59) называют условием инвариантности, а систему, в которой удается его реализовать, – инвариантной относительно ошибки измеряемого сигнала.
Условие инвариантности накладывает ограничения только на суммарную передаточную функцию, но не на передаточные функции отдельных каналов, поэтому при синтезе комплексной системы остается некоторая свобода выбора передаточных функций отдельных каналов, что позволит уменьшить ошибку из-за погрешностей датчиков.
Необходимо отметить, что условие инвариантности (7.59) в динамических системах удается выполнить лишь приближенно, поэтому в реальной системе динамическая ошибка не равна нулю (она может быть значительно уменьшена по сравнению с ошибками измерения при использовании одного канала измерения).
Следует также иметь в виду, что рассмотренная система, которую принято называть многоканальной схемой фильтрации, чувствительна к отклонению параметров устройств от расчетных значений, поэтому при проектировании таких систем необходимо обеспечить стабильность параметров ее звеньев.
Рассмотрим еще один класс комплексных систем РА, основой которых является обычная система РА с обратной связью, а сигнал с нерадиотехнического датчика, с помощью которого измеряется управляющее воздействие x(t), вводится в замкнутый контур после дискриминатора (рис. 7.12). В таких системах удается значительно повысить точность системы РА относительно управляющего воздействия без ухудшения средней квадратической ошибки из-за действия помех.
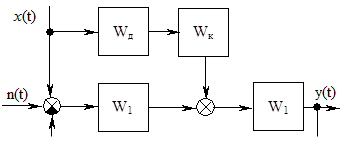
Рис. 7.12 - Структурная схема комплексной системы РА
Из рис. 7.12 следует, что преобразование Лапласа для выходного сигнала будет иметь вид
 ; (7.61)
; (7.61)
для ошибки системы
 . (7.62)
. (7.62)
Если выполняется условие инвариантности
 , (7.63)
, (7.63)
то выражения (7.61) и (7.62) принимают вид
 ;
;  , (7.64)
, (7.64)
где Wз(p) – передаточная функция замкнутого контура системы РА.
Из выражений (7.64) следует, что ошибка относительно управляющего воздействия равна нулю или инвариантна относительно этого сигнала. Путем выбора цепи сигнала ошибки системы с передаточной функцией W1(p) нетрудно сформировать замкнутый контур системы с учетом требуемой фильтрации помех.
Датчик, измеряющий управляющее воздействие, и последовательно включенный с ним фильтр с передаточной функцией Wк(р) образуют цепь компенсации комплексной системы РА. Эта цепь не формирует замкнутого контура, а следовательно, не влияет на устойчивость комплексной системы.
При реализации условия инвариантности (7.63) в реальных системах степень полинома числителя передаточных функций устройств всегда меньше степени полинома их знаменателя, поэтому функция (7.63) не удовлетворяет условию физической реализуемости и в данной системе РА инвариантность ошибки относительно управляющего воздействия недостижима. Однако в подобных системах можно существенно повысить точность относительно управляющего воздействия при необходимой фильтрации помех, т.е. сделать системы широкополосными относительно управляющего сигнала и узкополосными относительно помехи.
Синтез комплексных систем РА можно выполнить с учетом следующих условий: 1) обеспечения нужных частотных характеристик системы; 2) повышения ее динамической точности работы. Проанализируем метод, который позволит повысить порядок астатизма в комплексной системе относительно управляющего воздействия по сравнению с порядком астатизма замкнутого контура. Передаточная функция ошибки системы, как следует из выражения (7.62), имеет вид
 , (7.65)
, (7.65)
где We(p) – передаточная функция ошибки замкнутого контура.
Разложим передаточную функцию ошибки комплексной системы (7.65) в степенной ряд:
 . (7.66)
. (7.66)
Аналогичным образом представим и второй сомножитель выражения (7.65):
 . (7.67)
. (7.67)
Тогда передаточная функция ошибки комплексной системы с учетом выражения (6.8) примет вид

 , (7.68)
, (7.68)
где Ci, i = 0, 1, …, k – коэффициенты ошибок передаточной функции ошибки замкнутого контура системы.
Приравняв в последнем выражении слагаемые при одинаковых степенях р, найдем коэффициенты ошибок комплексной системы:
 (7.69)
(7.69)
Из формул (7.69) следует, что необходимый порядок астатизма обеспечивается, если соответствующее число коэффициентов Di (весовой коэффициент) равно нулю. Из этих условий и определяется выражение для передаточной функции компенсации комплексной системы.
Подставим выражения
 ; (7.70)
; (7.70)
 (7.71)
(7.71)
в формулу (7.67). Тогда для получения астатизма первого порядка необходимо, чтобы передаточная функция цепи компенсации была равна
 (7.72)
(7.72)
Коэффициенты этой функции определим из условия
 . (7.73)
. (7.73)
Для получения астатизма второго порядка нужно, чтобы передаточная функция цепи компенсации была равна
 (7.74)
(7.74)
Коэффициенты функции найдем из условия (7.73) при
 . (7.75)
. (7.75)
При последовательном определении коэффициентов передаточной функции (7.71) одни коэффициенты, например t i, выбирают из условия обеспечения требуемых характеристик комплексной системы, а коэффициенты a i вычисляют согласно равенству нулю соответствующих коэффициентов Di.
Коэффициенты t i передаточной функции цепи компенсации определяют инерционность цепи компенсации. Для выяснения их влияния на частотные характеристики представим передаточную функцию комплексной системы в виде
 . (7.76)
. (7.76)
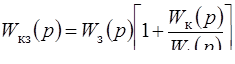
Следовательно, наличие цепи компенсации в комплексной системе эквивалентно последовательному включению с замкнутым контуром корректирующего устройства с передаточной функцией
 . (7.77)
. (7.77)
Из выражения (7.77) следует, что чем меньше инерционность цепи компенсации, тем больший опережающий эффект создается корректирующим устройством. При этом полоса пропускания комплексной системы РА относительно управляющего воздействия увеличивается.
Пример. Найти передаточную функцию цепи компенсации для системы автоматического сопровождения цели РЛС, рассмотренной в примере 7.1, если порядок астатизма в системе относительного воздействия, возникающего из-за колебаний летательного аппарата, равен двум.
Решение. Систему сформируем по схеме (рис. 7.12), в которой передаточные функции определяются выражениями
 ;
;

где  ;
;  ;
;  ;
;  ;
;
 ;
;  .
.
Воздействие, возникающее из-за колебаний летательного аппарата, измеряется гироскопическим датчиком угловой скорости, сигнал с которого является входным сигналом цепи компенсации.
Замкнутый контур рассматриваемой системы имеет первый порядок астатизма, поэтому для получения в комплексной системе астатизма второго порядка необходимо, как это следует из формул (7.69), чтобы коэффициент До в разложении (7.67) был равен нулю. Для этого нужно, чтобы передаточная функция цепи компенсации была реализована в соответствии с (7.74). Параметры цепи вычисляются из условия  ,
,  . Из последнего выражения находим, что
. Из последнего выражения находим, что  . Пусть t1=0,01 с для того, чтобы полоса пропускания системы относительно воздействия, возникающего из-за колебаний летательного аппарата, была больше полосы пропускания замкнутого контура. При расчетных значениях параметров системы автоматического сопровождения, найденными в примере 7.1, передаточная функция цепи компенсации
. Пусть t1=0,01 с для того, чтобы полоса пропускания системы относительно воздействия, возникающего из-за колебаний летательного аппарата, была больше полосы пропускания замкнутого контура. При расчетных значениях параметров системы автоматического сопровождения, найденными в примере 7.1, передаточная функция цепи компенсации
 .
.
Данная передаточная функция может быть реализована RС-цепью и усилителем с коэффициентом усиления, равным 11. Дальнейшее уменьшение коэффициента T1 с целью большего расширения полосы пропускания нецелесообразно, так как приводит к увеличению коэффициента усиления в цепи компенсации.

Рис. 7.13 - АЧХ комплексной системы РА
На рис. 7.13 показаны АЧХ замкнутого контура |Wз(j w)| и комплексной системы |Wзк(j w)|, из которых видно, что введение цепи компенсации расширило полосу пропускания относительно воздействия, обусловленного колебаниями летательного аппарата, до 37 с–1.
ЛИТЕРАТУРА
1. Теория автоматического управления / Под ред. А.В. Нетушила. Учебник для вузов. Изд. 2-е, доп. и перераб. – М.: Высшая школа, 1976.
2. Коновалов Г.Ф. Радиоавтоматика. Учеб. для вузов по спец. «Радиотехника». – М.: Высш. шк., 1990. – 335 с.
3. Первачев С.В., Валев А.А., Чиликина В.М. Статистическая динамика радиотехнических следящих систем. – М.: Сов. Радио, 1973. – 488 с.
4. Макаров И.М., Менский Б.М. Линейные автоматические системы (элементы теории, методы расчета и справочный материал). Учебное пособие для вузов. – М.: Машиностроение, 1977. – 464 с.
5. Проектирование радиоприемных устройств / Под ред. А.П. Сиверса. Учебное пособие для вузов. – М.: Сов. Радио, 1976. – 488 с.
6. Жаркой А.Г., Туев В.И. Радиоавтоматика. Руководство к лабораторным работам для студентов специальности 2301. Часть 2. - Томск: Ротапринт ТИАСУРа, 1988. – 27 с.
7. Коновалов Г.Ф., Коноваленко О.В. Системы автоматического управления с электромагнитными порошковыми муфтами. – М.: Машиностроение, 1976.
8. Радиоавтоматика / Под ред. В.А. Бесекерского. – М.: Высшая школа, 1985.
Введение
Предмет изучения теории управления и радиоавтоматики
Одними из первых автоматические регуляторы были использованы в поплавковых регуляторах парового котла И.И. Ползунова (1765 г.) и затем в регуляторах скорости вращения машин Дж. Уатта (1784 г.). Все последующие годы работы велись по улучшению основных характеристик автоматических механизмов. Однако в 1876 году петербургский профессор И.А. Вышнеградский отметил, что увеличение точности работы механизмов ведет к его неустойчивой работе в динамическом режиме. Позднее он сформулировал критерий устойчивости систем третьего порядка. В радиотехнике системы автоматического регулирования были использованы в устройствах автоматической регулировки усиления в первых радиоприемниках. Радиоавтоматика (РА) как самостоятельный класс в науке обязана появлению такой науке как кибернетика. Выделение систем РА в самостоятельный класс обусловлено также и их особенностями, связанными с условиями работы в составе радиотехнических систем и систем радиоуправления. К особенностям работы данных систем относятся и обработка радиосигнала при действии различного рода помех. Надежность и качество работы систем РА определяет качество работы радиоаппаратуры и систем радиоуправления.
В современных радиотехнических устройствах различного назначения и системах радиоуправления широко используются автоматические системы, которые называются системами радиоавтоматики (системами РА). К числу таких систем относятся устройства фазовой (ФАПЧ) и частотной (АПЧ) автоподстройки частоты, автоматической регулировки усиления (АРУ), системы измерения координат движущихся объектов, измерители дальности, различные следящие системы устройств и систем радиоуправления.
Изложение основ построения, метода анализа и проектирования систем радиоавтоматики применительно к радиотехническим устройствам и системам является основной задачей данного учебного пособия.
Последнее изменение этой страницы: 2019-04-10; Просмотров: 322; Нарушение авторского права страницы
 . (3.20)
. (3.20)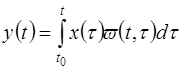 , (3.21)
, (3.21)
 ;
; ,
, ;
; ;
; ;
;  .
. ,
,
 . (4.4)
. (4.4)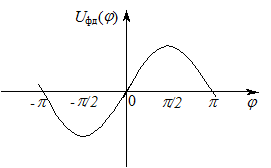
 ,
, ,
, , (4.5)
, (4.5)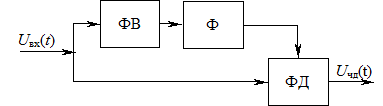
 ;
; ,
, , (4.6)
, (4.6) – мнимая частотная характеристика фильтра.
– мнимая частотная характеристика фильтра. . На дискриминационной характеристике (рис. 4.4) видно, что при малых значениях частотной расстройки характеристику можно считать линейной и ее можно представить в виде F(j) = kчдD w, где kчд – коэффициент передачи частотного дискриминатора. Из этого выражения следует, что передаточная функция ЧД равна
. На дискриминационной характеристике (рис. 4.4) видно, что при малых значениях частотной расстройки характеристику можно считать линейной и ее можно представить в виде F(j) = kчдD w, где kчд – коэффициент передачи частотного дискриминатора. Из этого выражения следует, что передаточная функция ЧД равна
 ,
, .
. , (4.12)
, (4.12) . При
. При  напряжение uвд уменьшается и при
напряжение uвд уменьшается и при  становится равным нулю (рис. 4.7).
становится равным нулю (рис. 4.7).

 может быть представлена в виде [5]
может быть представлена в виде [5] , (4.13)
, (4.13) , (4.14)
, (4.14) ).
). ;
; ,
, .
. , (4.15)
, (4.15)