
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Поворот способом кратчайших расстояний выполняется по исполнительно-му сигналу флагмана. На время поворота кораблем-уравнителем становится фланговый корабль внутренней стороны поворота.Стр 1 из 12Следующая ⇒
БИЛЕТ № 1 1) Основные понятия, определения, виды и способы маневрирования. Основные понятия и определения Маневр – это движение корабля (соединения кораблей) с целью занятия или изменения своего положения относительно какого-либо объекта, а процесс выполнения маневра называется маневрированием. Маневр корабля (соединения кораблей), применяемый в боевых действиях на море, для занятия, удержания или изменения своего положения относительно противника с целью создания выгодных условий для наиболее эффективного использования своего оружия и технических средств, а также для затруднения маневра противника, является маневром тактическим и выполнение такого маневра называется тактическим маневрированием. Маневр корабля (соединения кораблей), применяемый в боевых действиях на море, для занятия, удержания или изменения своего положения относительно противника с целью создания выгодных условий для наиболее эффективного использования своего оружия и технических средств, а также для затруднения маневра противника, является маневром тактическим и выполнение такого маневра называется Координаты, определяющие положение маневрирующего корабля относительно объекта маневра, т.е. его позицию – пеленг, курсовой угол и дистанция – называют-ся элементами позиции. 2) Основные способы изменения курса строя кораблей, их достоинства и недостатки. При совместном плавании кораблей в строях изменение курса строя может производиться следующими способами: - последовательного поворота; - все вдруг; - захождения; - двух полуповоротов; - поискового поворота; - кратчайших расстояний. Последовательным поворотом называется такое изменение движения кораблей, при котором каждый последующий корабль поворачивает на новый курс в точке поворота предыдущего (головного) корабля, сохраняя при этом свое место в строю (рис.4). Последовательный поворот является простейшим способом маневра для изменения линии строя и применяется только в строю кильватера. Каждый корабль начинает и заканчивает маневр поворота самостоятельно. Для лучшего сохранения линии строя каждый последующий корабль при повороте должен удерживать форштевень на внутренней (в сторону циркуляции) кромке кильватерной струи впереди идущего корабля. Поворотом «все вдруг» называется такое изменение направления движения строя (ордера) кораблей, при котором все корабли одновременно поворачи-вают на новый курс, причем пеленг и расстояние от любого корабля до уравнителя остаются неизменными (рис.5). Данный способ применяется для быстрого изменения направления движения строя (ордера) кораблей, что имеет важное значение при уклонении соединения от атак подводных лодок и торпедных катеров противника. Изменение курса строя производится в такой последовательности: - по сигналу флагмана крайний внутренний корабль №5 строя поворачивает на новый курс и дает малый ход; - остальные корабли следуют прежним курсом до лини поворота АБ, причем корабли №1 и №2, внешние по отношению к стороне поворота, увеличивают ход до самого полного, средний корабль № 3 идет полным ходом, а корабль №4, находящийся в части строя, внутренней по отношению к стороне поворота, уменьшает ход до малого; с приходом на линию поворота АБ каждый корабль самостоятельно начинает поворот на назначенный курс и когда пеленг на средний корабль строя (уравнитель) станет равен назначенному, дает полный ход. Поворот способом двух полуповоротов называется такое изменение направ-ления движения строя (ордера), при котором корабли дважды поворачивают на половину общей величины изменения курса при общих для всех кораблей линии начала поворота и линии конца поворота (рис.7). В отличие от поворотов захождения при повороте способом двух полупово-ротов скорости движения кораблей на промежуточных курсах строго регла-ментированы наличием линии перемены ходов, что обеспечивает бóльшую точность и безопасность поворота, хотя при этом несколько увеличивает время маневра. Этот способ чаще всего применяется при плавании в строю фронта. Изменение курса способом двух полуповоротов производится в такой последовательности: - по сигналу флагмана головной корабль №1 поворачивает на угол, равный половине угла изменения курса α/2, остальные корабли совершают поворот самостоятельно с приходом на линию первого полуповорота ОВ (если корабли идут строем фронта, то все корабли строя поворачивают «все вдруг» на угол, равный половине угла изменения курса α/2); - крайний внутренний (относительно стороны поворота) корабль №1(А) сразу после окончания поворота дает малый ход, корабль №2, находящийся от средней точки С в сторону крайнего внутреннего корабля №1, дает сред-ний ход, корабли №3 и №4, находящиеся от средней точки строя С в сторону крайнего внешнего корабля №4, продолжают после поворота идти полным ходом; - на линиях перемены ходов АС' и СВ' производится изменение ходов внут-ренним кораблям №2 со среднего на малый, а внешним кораблям №3 с полного на средний; - с выходом на линию второго полуповорота ОВ' каждый корабль самостоя-тельно ложится на объявленный курс и дает полный ход. Поисковый поворот это такое изменение направления движения строя кораблей, при котором поворот выполняется на значительные углы (>45°) без изменения скорости. Этот способ поворота применяется при поиске подводных лодок корабельными поисково-ударными группами в строю фронта (рис.8). По исполнительному сигналу крайний внешний по отношению к стороне поворота корабль начинает поворот на назначенный курс. Остальные корабли продолжают движение прежним курсом до прихода на линию поворота, которая является биссектрисой угла поворота α, проведенной из точки поворота корабля, первым начавшим поворот под углом α/2 к линии прежнего курса. Дойдя до линии поворота каждый корабль, самостоятельно начинает пово-рот на новый курс. Скорость хода кораблей при выполнении поворота не изменяется. Если до поворота корабли следовали строем фронта влево, то после поворота они окажутся находящимися в строю фронта вправо, и наоборот. Расстояние между кораблями не изменяется. БИЛЕТ №2 1. Основные элементы маневрирования, дать понятия и определения. Величины, характеризующие изменение положения маневрирующего корабля отно-сительно объекта маневра за одну минуту времени в маневрировании, называются основными элементами маневрирования (ОЭМ) и им присвоены собственные наи-менования: ВИР, БП и ВИП. ВИР – величина изменения расстояния (дистанции) между маневрирующим кораб-лем и объектом маневра за одну минуту времени, выраженная в кабельтовых и рас-считывается по формуле: ВИР = - 1/6 V ×с osq БП – величина перемещения маневрирующего корабля по направлению, перпенди-кулярному линии пеленга на объект маневра, за одну минуту времени, выраженнаяв кабельтовых и рассчитывается по формуле: БП = 1/6 V × sinq ВИП - величина изменения пеленга с маневрирующего корабля на объект маневраза одну минуту времени, выраженная в градусах и рассчитывается по формуле: ВИП = БП/ D ×57.3º ВИР, БП и ВИП являются основными элементами маневрирования, характеризую-щими процесс изменений позиции маневрирующего корабля относительно непод-вижного объекта маневра, т.е. при одностороннем маневрировании. В случае, когда два корабля маневрируют один относительно другого, изменения основных элемен-тов маневрирования зависят от перемещения обеих кораблей. Тогда основными элементами двухстороннего маневрирования являются: ОВИР, ОБП, ВИП . ОВИР – общая величина изменения расстояния : ОВИР = ВИРк + ВИРм = (- 1/6 V к× cosq к) + (-1/6 V м× cosq м) = - 1/6 Vρ × с osqρ Максимальное значение ОВИР имеет при q м = q к = 0° или 180º, т.е. когда корабли идут навстречу друг другу со скоростью, равной сумме векторов скоростей ( V к + V м), либо удаляются друг от друга с той же скоростью. Наименьшее значение ОВИР будет в случае, когда ВИР обеих кораблей будут равны и противоположны по знаку. ОБП – общая величина бокового перемещения:ОБП = БПк + БПм = 1/6 V к× sinq к + 1/6 V м× sinq м = 1/6 Vρ × sinqρ ОБП равно алгебраической сумме боковых перемещений обеих кораблей и зависит от скоростей и курсовых углов маневрирующих кораблей и их бортов, которыми они обращены друг к другу. Когда корабли маневрируют одноименными бортами, ОБП по абсолютной величине больше, чем при ма-неврировании разноименными ботами. Это происходит потому, что в первом случае ОБП равно сум-ме боковых перемещений кораблей, а во втором – разности. Наибольшее значение ОБП будет при маневрировании кораблей одноименными бортами, когда q м = q к = 90°, и наименьшее значение – при q м = q к = 0° или 180º, где ОБП = 0. ВИП – величина изменения пеленга: ВИП = (БПк + БПм)/ D = 0БП/ D ×57.3º ВИП зависит от скоростей, курсовых углов и расстояния между кораблями.С увеличением дистанцииВИП уменьшается. Знак ВИП одинаков со знаком ОБП. Когда корабли маневрируют разноименнымибортами и их БП равны по абсолютной величине и противоположны по знаку, т.е. БПм = - БПк, это указывает на то, что корабли маневрируют при постоянстве пеленга, в этом случае ВИП = 0. Наибольшее значение ВИП имеет при маневрировании кораблей одноименными бортами. Геометрический смысл основных элементов маневрирования ВИРм (ВИРк) – величина проекции вектора скорости корабля М (корабля К)на линию пеленга между кораблями. При носовых (острых) курсовых углахкорабля М (корабля К) величина ВИРм (ВИРк) отрицательна, при кормовых (тупых) курсовых углах –положительна. БПм (БПк) – величина проекции вектора скорости корабля М(корабля К) на направление, перпендикулярное линии пеленга. При курсовых углах корабля М (корабля К) правого борта величина БПм(БПк) положительна, левого борта– отрицательна. ОВИР, ОБП – проекция вектора относительной скорости на те же направления.ОВИР положительна – расстояние между кораблями увеличивается, отрица-тельна – расстояние уменьшается. ОБП положительно – пеленг между кораб-лями меняется по часовой стрелке, отрицательно – пеленг меняется против часовой стрелки. ВИП имеет тот же знак, что и ОБП. 2. Маневрирование кораблей в ордерах: способы построения ордеров.Ордером соединения (группы кораблей) называется точнорегламентированное по направлениям и расстояниям взаимное расположение кораблей, маневрирующих совместно в бою (боевой ордер) или на переходе морем (походный ордер). Походные и боевые ордера должны обеспечивать: ◙ круговое наблюдение радиотехническими и зрительными средствами; ◙ оповещение о воздушных, надводных и подводных целях ; ◙ наиболее эффективное использование корабельных технических средств и оружия; ◙ уменьшение эффективности воздействия оружия противника, атакующего соединение; ◙ свободу маневра соединения для уклонения от противника; ◙ удобство управления соединением. Вопросы эффективного использования корабельных технических средств и оружия, также уменьшения эффективности применения оружия противником решаются в основном соответствующим расположением кораблей в ордере. Основной формой построения современных ордеров является круговой ордер. Основной формой построения современных ордеров является круговой ордер. Круговым ордером (рис.1) называется ордер, в котором охраняемые корабли следуют в простом или сложном строю, а корабли охранения располагаются на концентрической окружности вокруг них.
Центром ордера называется центр концентрических окружностей, на которых располагаются охраняемые корабли и корабли охранения. Основные параметры, характеризующие расположение кораблей в ордере: ◘ расстояние между охраняемыми кораблями; ◘ удаление линии охранения от охраняемых кораблей; ◘ расстояния между кораблями охранения на линии охранения; ◘ количество охраняемых кораблей и кораблей охранения. Расстояние между охраняемыми кораблями определяется главным образом исходя из требований уменьшения эффективности ударов противника. На переходе морем и в бою корабли могут подвергаться атакам при использова-нии противником различных видов оружия, которое может иметь как обыч-ный, так и атомный заряды. Расстояние между охраняемыми кораблями должно быть таким, чтобы уменьшить или исключить возможность нахождения двух соседних кораб-лей в одном круге рассеивания бомб и торпед или возможность одновремен-ного поражения этих кораблей взрывом атомной бомбы. При отсутствии атомной угрозы расстояние между охраняемыми кораблями должно быть не менее диаметра круга рассеивания бомб. При наличии атомной угрозы, сле-дует учитывать радиус поражающего действия взрывной волны, проникаю-щей радиации и радиоактивного заражения. Удаление линии охранения от охраняемых кораблей должно быть таким, чтобы обеспечивалась наибольшая эффективность применения кораблями своего оружия для обороны охраняемых кораблей от ударов противника. Различные виды обороны (ПВО, ПЛО, ПКО, ПМО и т.д.) предъявляют раз-личные требования к удалению линии охранения от охраняемых кораблей. Поэтому при определении удаления линии охранения от охраняемых кораб-лей следует комплексно решать задачи обороны соединения от всех возмож-ных видов нападения противника. Поскольку основной задачей обороны соединения кораблей на переходе морем является сохранение кораблей (судов), выполняющих главную задачу, ради которой совершается переход, то в качестве основного критерия эффективности обороны, а следовательно, и построения ордера, можно принять математическое ожидание числа не уничтоженных охраняемых кораблей, которое рассчитывается по формуле: Количество кораблей охранения и расстояния между ними на линии охранения являются взаимосвязанными величинами. В общем случае, исходя из равновероятности атак противника с любого направления, корабли охранения располагаются на круговой линии охранения на равных расстояниях друг от друга. Тогда (рис.1) d =2π ( r + R ) / N 0, где N 0 – число кораблей охранения; ( r + R ) – расстояние от центра ордера до линии кораблей охранения. При построении ордера позиции охраняемых кораблей и кораблей охранения назначаются относительно центра ордера. Свои места в ордере они удерживают по пеленгам и расстояниям до одного из кораблей, назначенного уравнителем. Порядок построения ордера на маневренном планшете ► считая центр ордера совпадающим с центром планшета, по курсовым углам и расстояниям от него нанести назначенные позиции охраняемых кораблей и кораблей охранения; ► измерить курсовой угол q у и расстояние, в котором должен находиться свой корабль относительно уравнителя; ► рассчитать угол равнения q рав и пеленг, на котором корабль должен удерживаться относительно уравнителя: q рав = 180º - q у; Прав = Ку ± q рав, где Ку – курс, на котором производится построение ордера. БИЛЕТ №3 1. Метод относительного движения.Метод относительного движения В теоретической механике движение точки по отношениюк подвижной системе координат называется относительным движением. Движение самой системы координат называется переносным движением. Движение той же точки относительно осей координат, условно принятых за неподвижную систему, называется абсолютным движением. Из кинематики известно, что вектор абсолютного переме-щения равен геометрической сумме векторов относитель-ного и переносного перемещения и скорость абсолютного движения также равна геометрической сумме скоростей относительного и переносного движений, т.е. V абс = V отн + V пер Для применения общей теории относительного движения к вопросам маневрирования кораблей вводятся следующие условности ► Географические координаты будем рассматривать как неподвижную систему координат, т.к. собственное движение Земли в рассматриваемых вопросах роли не играет. ► За начало подвижной системы координат будем принимать объект маневра, и тогда собственное движение объекта маневра относительно местности будет пере-носным, собственное движение манерирующего корабля относительно местностибудет абсолютным, а относительно объекта маневра относительным движением .Сущность метода относительного движения Изучение изменения положения корабля М относительно корабля К, как следствия перемещения кораблей М и К относительно земной поверхности со скоростями V м и V к , можно заменить изучением изменения положения корабля М, как следствия его перемещения относительно корабля К с относительной скоростью V ρ . Решение задач прямолинейного маневрирования методом относитель-ного движения сводится в конечном итоге к построению треугольников позиций и скоростей (путей). Треугольник путей (перемещений) называется треугольник, сторонами которого являются векторы перемещений двух маневрирующих относительно друг друга кораблей и вектор их относительного перемещения. Если промежуток времени t , для которого построен треугольник путей, взять достаточно малым и принять за единицу, то треугольник путей обратится в треугольник скоростей и стороны его будут представлять собой векторы скоростей кораблей V к и V м и вектор относительной скорости Vρ . Треугольник путей и треугольник скоростей подобны и отношение соответствующих сторон их равно t , т.е. S к / V к = S м / V м = Sρ / Vρ = t Треугольником позиций называется такой треугольник, вершинами которого являются позиции кораблей, маневрирующих относительно друг друга, а сторонами – расстояния между кораблями, отложенные по линиям начального и конечного пеленгов, и вектор относительного перемещения. 2. Маневрирование кораблей в строях: виды маневрирования и меры безопасности от столкновений. Строем называется простейший ордер , в котором корабли расположены на одной или нескольких прямых линиях. Как правило, в строях находятся группы кораблей охранения и группы охраняемых кораб-лей, входящих в состав походных или боевых ордеров соединений корабле. По степени сложности построения строи различаются Простые строиПростым строем называется строй, в котором все корабли расположены на одной прямой линии (рис.1). Строй кильватера (кильватерная колонна). Строем кильватера называется такой строй, в котором угол строя равен 180° и корабли идут в одной кильватерной струе.Строй фронта. Строем фронта называется такой строй, при котором линия строя перпендикулярна курсу кораблей. Строй пеленга. Строем пеленга называется такой строй, в котором угол строя может быть любым, но не равным 0°, 90°, 180° Строй уступа. Строем уступа называется такой строй, в котором угол равнения равен 45° (частный случай строя пеленга). Сложные строи Сложным строем называется такой строй , в котором корабли расположены в несколько линий или на одной ломаной линии (рис.2). Строй клина . Строем клина называется такой строй, в котором корабли расположены на сторонах угла, в вершине которого находится корабль-уравнитель.Строй сложного кильватера.Строем сложного кильватера называется такой строй, в котором корабли следуют в нескольких кильватерных колоннах. трой сложного фронта. Строем сложного фронта называется такой строй, в котором корабли следуют в нескольких параллельных линиях, каждая из которых представляет собой строй фронта. БИЛЕТ №4 1. Предвычесление элементов позиции маневрирующего корабля. При маневрировании двух кораблей на постоянных курсах относительно друг друга будет происходить непрерывное изменение их взаимного положения, т.е. изменение элементов позиций кораблей, а именно: дистанции, пеленга и курсовых углов. Вектор относительного перемещения, или относительный путь Sρ , является геометри-ческим местом точек, в которых располагаются последовательные позиции маневри-рующего корабля относительно объекта маневра, называется линией относительного перемещения, т.е. линией, по которой перемещается маневрирующий корабль относительно объекта маневра. Направление линии относительного перемещения в маневрировании называется относительным курсом, а величина перемещения по этому направлению за единицу времени – относительной скоростью. Угол между линией относительного курса и линией пеленга на объект маневра называется относительным курсовым углом. Закономерности изменения элементов позиций Закономерность изменения курсовых углов и пеленгов. Для установления закономернос-ти изменения взаимного положения кораблей при маневрировании перейдем от абсолют-ного движения к относительному и будем рассматривать только движение маневрирую-щего корабля относительно объекта маневра. Для этой цели построим треугольник пере-мещений М0М'1М1 и треугольник позиций К0М0М'1(рис.1),где: q м1 = q мо + ΔП; q к1 = q ко + ΔП; qρ 1 = qρ о + ΔП. Эти равенства выражают зависимость изменения курсовых углов при маневрировании кораблей от изменения пеленга. Курсовые углы q м, q к и qρ в общем случае непрерывно изменяются. За один и тот же промежуток времени изменение всех трех курсовых углов будет одинаково и равно величине изменения пеленга. Закономерность изменения дистанции между кораблями рассмотрим из треугольникапозиций К0М0М'1, из которого: D 1 = D 0 ( sinqρ о / sinqρ 1), заменяя qρ 1 на qρ о + ΔП, получим D 1 = D 0 ( sinqρ о / sin ( qρ о+ΔП)). Выражение D 1 = D 0 ( sinqρ о / sin ( qρ о+ΔП)) представляет собой уравнение прямой в полярных координатах и аналитически выражает закономерность изменения дистанции между кораблями при двустороннем маневрировании на постоян-ных курсах. Анализ формулы D 1 = D 0 ( sinqρ о / sin ( qρ о+ΔП)) показывает, что при маневриро-вании двух кораблей на постоянных курсах относительно друг друга дистанция между ними непрерывно изменяется. Наименьшего значения дистанции D кр достигает при sin ( qρ о+ΔП) = 1, т.е. когда qρ 2 = qρ о+ΔП = 90°. Положение, когда qρ = 90°, называется отно-сительным траверзом. Построив для момента относительного траверза треугольникпозиций К0М0М'2, можем из него написать, что если qρ о + ΔП = 90°, то D 2 = D тр = D 0 sinqρ о.Отрезок относительного перемещения М0М'2, который должен пройти маневрирующий корабль от начальной позиции М0 до позиции в момент относительного траверза М'2,обозначим Sρ тр, тогда Sρ тр = D 0 cosqρ о. +решение задач на маневренном планшете основано на применении законов относи-тельного движения и заключается в построении основных треугольников маневрирова-ния, т.е. треугольника позиций и треугольника скоростей. 2. Построения и перестроения кораблей в ордере. Основные способы изменения курса ордера, их достоинства и недостатки.
Поворот способом разделения имеет преимущество перед поворотом способом захождения при значительных углах поворота, так как он сокращает общее время маневра за счет назначения новых позиций кораблям охранения, что уменьшает длины путей, проходимых ими при выполнении поворота. Вместе с тем поворот способом разделения более сложен в исполнении, так как корабли охранения должны поворачивать в разные стороны, их курсы для занятия новых позиций могут пересекаться, что не исключает возможности опасного сближения. БИЛЕТ №5 Изменение позиции маневрирующего корабля относительно объекта манёвра. Существо вопроса Суть общего случая изменения позиции маневрирующего корабля относительно объекта манёвра заключается в следующем. В начальный момент маневрирующий корабль находится от объект маневра на расстоянии D 0 и П0, который следует постоянным курсом Кк и скоростью V к. Маневрирующему кораблю необходи-мо, следуя со скорость V м, в кратчайший срок занять относитель-но объекта маневра другую позицию по пеленгу П1 и дистанции D 1 (иногда вместо пеленга задается курсовой угол). Необходимо рассчитать курс, которым должен следовать маневрирующий корабль, и время маневра для занятия назначенной позиции. Эта задача относится к числу наиболее часто встречающихся при выполнении тактических расчетов и обеспечении применения оружия, особенно противолодочного и торпедного, эффективность применения которого зависит не только от расстояния, но и от курсового угла цели. С объектом маневра Одним из часто встречающихся общих случаев изменения позиции отно-сительно объекта маневра, является сближение вплотную маневрирую-щего корабля с объектом маневра. К сближению вплотную сводится ре-шение многих других задач маневрирования. Данную задачу приходится решать для обеспечения попадания оружия (ракет, торпед, глубинных бомб) в движущуюся цель. Задача на сближение вплотную в общем виде может быть сформулирова-на следующим образом: как должен маневрировать корабль М, имеющий скорость V м, чтобы в кратчайший срок сблизиться вплотную с объектом маневра К, идущим курсом Кк с постоянной скоростью V к. Существо задачи заключается в следующем. Пусть известны взаимное положение маневрирующего корабля М0 и объекта маневра К0 в начальный момент времени, а также курс и скорость объекта маневра. Необходимо найти такой курс маневрирующего корабля, чтобы он следуя заданной скорос-тью, в некоторый момент времени оказался в одной точке с объектом маневра, т.е. сблизился с ним вплотную. Очевидным условием сближения маневрирующего корабля и объектаманевра вплотную является равенство промежутков времени, за которое они проходят расстояние до точки встречи, т.е. S м/ V м = S к/ V к = t . Следовательно По теореме синусов (стороны треугольника пропорциональны сину-сам противолежащих углов) V к/ sinq м = V м/ sinq к, т.е. sinq м = V к/ V м × sinq к. Таким образом, чтобы сблизится с объектом маневра вплотную, ма-неврирующий корабль должен привести объект маневра на курсовой угол q м, т.е. лечь на такой курс, чтобы курсовой угол на объект ма-невра был равен рассчитанной по выше указанной формуле величи-не. Из этой же формулы следует, что V м/ sinq м = V к/ sinq к, т.е. БПм = БПк. Иными словами, условием сближения маневрирующего корабля с объектом маневра вплотную является равенство боковых перемеще-ний маневрирующего корабля и объекта маневра. Поскольку знаки q м и q к при сближении вплотную всегда разноименны, то разноименны-ми будут и боковые перемещения БПм и БПк, следовательно: ОБП = БПм + БПк = 0, отсюда и ВИП = ОБП/ D = 0. Таким образом, при сближении вплотную пеленг на объект маневра остается неизменным. Этим обстоятельством пользуются для контроля правильности выполнения маневра (если пеленг на объект маневра не меняется, сближение вплотную обеспечено). Так как в течении всего времени маневра сближения вплотную пеленг между кораблями не меняется, остаются постоянными и их курсовые углы. Будут также неизменными ВИРк, ВИРм и ОВИР. 2. Изменение курса строя при последовательном повороте. Ti – промежуток времени между началом поворота головного и i -го корабля; di – дистанция между головным и i -ми кораблями в момент начала поворота головного корабля; V – скорость хода кораблей в строю. Общее время выполнения маневра последовательного поворота определяется по формуле: t пов = t к + tα , где: t к – промежуток времени между началом поворота головного до начала поворота концевого корабля; tα – время циркуляции на угол поворота строя. Последовательным поворотом называется такое изменение движения кораблей, при котором каждый последующий корабль поворачивает на новый курс в точке поворота предыдущего (головного) корабля, сохраняя при этом свое место в строю (рис.4). Последовательный поворот является простейшим способом маневра для изменения линии строя и применяется только в строю кильватера. Каждый корабль начинает и заканчивает маневр поворота самостоятельно. Для лучшего сохранения линии строя каждый последующий корабль при повороте должен удерживать форштевень на внутренней (в сторону циркуляции) кромке кильватерной струи впереди идущего кораб kz БИЛЕТ №6 1.Частные случаи изменения позиции маневрирующего корабля относительно объекта манёвра (сближение вплотную встречными курсами и догоняя). Сближение вплотную догоняя Предположим, что объект маневра К уходит, а маневрирующий корабль М догоняет его и они идут вдоль линии начального пеленга, q к = 180°, а q м = 0°, то для сближения вплотную маневрирующий корабль М должен лечь на курс, равный пеленгу на объект маневра К, т.е. Км = Пм→к = П0 - 180° (рис.5). В этом случае треугольник позиций М0К0М'1 и треугольник скоростей обращаются в прямые линии, относительное перемещение кораблей равно начальной дистанции, т.е. Sρ = D 0, а относительная ско-рость сближения кораблей равна разности скоростей догоняющего и догоняемого, т.е. Vρ = V м - V к. Время, необходимое для сближения кораб-лей вплотную, будет t = Sρ / Vρ = D 0/ V м - V к. Пути, проходимые каждым кораблем до момента, когда корабль М догонит корабль К, т.е. до момен-та сближения вплотную, будут: для маневрирующего корабля М S м = V м t , для объекта маневра К S к = V к t . В этой ситуации, когда один корабль догоняет другого, необходимо иметь ввиду, что если скорость маневриру-ющего корабля меньше или равна скорости объекта маневра, т.е. V м ≤ V к, сближение вплотную невозможно.
Вывод по второму вопросу Заключение В зависимости от отношения скоростей маневрирующего корабля и объекта маневра при решении задач сближения вплотную могут быть два случая: ► маневрирующий корабль имеет преимущество хода по сравнению с объектом маневра, в этом случае сближение маневрирующего корабля с объектом маневра теоретически может быть осуществлено всегда при условии, если навигационная или тактическая обстановка не будут тому препятствовать; ► преимущество в скорости хода имеет объект маневра, маневрирующий корабль может сблизится с объектом маневра на заданное расстояние только при соблюдении ряда условий, которые определяются взаимным положением кораблей в начальный момент выполнения маневра. 2. Изменение курса строя при повороте способом захождения. БИЛЕТ №7 1. Критический курсовой угол. Критическим курсовым углом называется наибольшее значение курсового угла объекта маневра, при котором корабль с меньшей скоростью хода может сближаться с ним при постоянстве пеленга. Критический курсовой угол обозначается буквой Q и рассчитывается по формуле: sinQ = V м/ V к. - если начальная позиция корабля с меньшей скоростью хода относительнокорабля с большей скоростью хода находится в пределах критического кур-сового угла, т.е. q к≤ Q , то сближение его с прямоидущим быстроходным ко-раблем с сохранением постоянства пеленга возможно на любую дистанцию, вплоть до сближения вплотную; - если начальная позиция корабля с меньшей скоростью хода относительно корабля с большей скоростью хода находится за пределами критического курсового угла, т.е. q к> Q , то сближение вплотную невозможно, а возможно только сближение на ограниченную дистанцию с изменением пеленга на нос. Если начальная позиция маневрирующего корабля находится за пределамикритического курсового угла, то сближение с быстроходным объектом маневра возможно только на ограниченное расстояние и только с изменением пеленга в сторону увеличения курсового угла объекта маневра.
2. Основные элементы одностороннего маневрирования. ВИР, БП и ВИП являются основными элементами маневрирования, характеризу-ющими процесс изменений позиции маневрирующего корабля относительно объекта маневра и рассчитываются по формулам : ВИР = - 1/6 V ×с osq ; БП = 1/6 V × sinq ; ВИП = БП/ D ×57.3º. Из формул видно, что в случае маневрирования на постоянном курсовом угле ВИР и БП будут величинами постоянными, а ВИП будет величиной переменной, в случае маневрирования на постоянном курсе ВИР, БП и ВИП будут величина-ми переменными, т.к. ВИР пропорционален скорости хода корабля и косинуса его курсового угла и не зависит от расстояния до объекта; БП пропорционально скорости хода корабля и синусу его курсового угла и не зависит от расстояния до объекта; ВИП пропорционален скорости хода корабля и синусу его курсового угла и обратно пропорционален расстоянию от корабля до объекта (с уменьше-нием дистанции ВИП увеличивается, с увеличением – уменьшается). БИЛЕТ №8 1. Сектор доступных позиций. Суть вопроса Из сказанного выше следует, что критический курсовой угол определяет возможность маневрирующего корабля сблизиться с объектом маневра, имеющим преимущество в скорости хода. Но если построить двойной критический угол при начальной позиции маневрирующего корабля то стороны его образуют сектор, в пределах которого могут располагаться линии относи-тельных перемещений маневрирующего корабля идущего на сближение. Этот сектор называется сектором доступных позиций. Из формул видно, что в случае маневрирования кораблей на постоянных курсовых углах ОВИР и ОБП будут величинами постоянными, а ВИП будет величиной переменной. В случае маневрирования кораблей на постоянных курсах ОВИР, ОБП и ВИП будут величинами переменными. При маневрировании двух кораблей относительно друг друга ОВИР будет равен алгебраической сумме частных значений ВИРов каждого из кораблей и от дистанции не зависит, ОБП будет равно алгебраической сумме частных значений БП каждого из кораблей и от дистанции между кораблями ОБП не зависит, ВИП будет пропорционален ОБП и обратно пропорционален дистанции между кораблями в данный момент (с уменьшением дистанции ВИП увеличивается, с увеличением дистанции ВИП уменьшается). БИЛЕТ №9 1. Окружность встреч. Наглядное представление о всех возможных случаях сближения вплотную дает рассмотрение вопроса об окружности встреч, как геометрическом месте точек, в которых корабли могут сблизится вплотную.Предположим, что маневрирующий корабль находится в начальный моментв точке М0, а объект маневра в точке К0 по пеленгу П0 и дистанции D 0, соотношение скоростей маневрирующих кораблей V м< V к (рис.6). Допустим, что корабли М и К идут навстречу друг другу, их встреча произойдет в точке С1. Если же корабль К, имеющий большую скорость, догоняет корабль М, то их сближение вплотную произойдет в точке С2. Если маневрирующий корабль будет идти курсом Км4, перпендикулярным начальному пеленгу П0, то встреча кораблей произойдет на границе критического угла, в точке С4, точка С3 будет точкой сближения вплотную, когда корабли будут идти курсами Км3 и Кк3. Из рис.6 видно, что отрезки М0С1,М0С2,М0С3 и М0С4 – пути, проходимые маневрирующим кораблем до встречи с объектом маневра в точках С1,С2,С3,С4, а отрезки К0С1,К0С2,К0С3 и К0С4 – пути объекта маневра до встречи с маневрирующим кораблем в тех же точках. Исходя из этого можно определить, что если у маневрирующих кораблей общие точки при сближении вплотную, то проходимые ими пути пропорциональны отношению их скоростей, т.е. М0С1/ К0С1= М0С2/ К0С2=…. V м/ V к. Геометрическое место точек С1,С2,….С n , в которых происходит сближение вплотную двух маневрирующих кораблей, вышедших из начальных позиций М0 и К0 со скоростями V м и V к, называется окружностью встреч. Радиус окружности встреч рассчитывается по формуле: R = D 0 (( V м× V к)/( V ²к - V ²м)).Если V м= V к, окружность встреч превращается в прямую линию, перпендикулярную начальному пеленгу, и проходит через его середину, потому что R → ∞.Если V м> V к, окружность встреч располагается вокруг начальной позиции объекта маневра, а это свидетельствует, что окружность встреч является принадлежностью тихоходного корабля. Выводы по первому вопросу Начальная позиция более тихоходного корабля всегда будет находиться внутри окружности встреч, а начальная позиция более быстроходного корабля всегда будет нахо-диться за ее пределами. 2.Основные треугольники маневрирования, их определения и способы построения. Треугольник путей (перемещений) называется треугольник, сторонами которого являются векторы перемещений двух маневрирующих относительно друг друга кораблей и вектор их относительного перемещения. Если промежуток времени t , для которого построен треугольник путей, взять достаточно малым и принять за единицу, то треугольник путей обратится в треугольник скоростей и стороны его будут представлять собой векторы скоростей кораблей V к и V м и вектор относительной скорости Vρ . Треугольник путей и треугольник скоростей подобны и отношение соответствующих сторон их равно t , т.е. S к / V к = S м / V м = Sρ / Vρ = t
Треугольником позиций называется такой треугольник, вершинами которого являются позиции кораблей, маневрирующих относительно друг друга, а сторонами – расстояния между кораблями, отложенные по линиям начального и конечного пеленгов, и вектор относительного перемещения.
Методы построения: 1. Прямого построения (на планшете): при прямом векторы скоростей и объекта манёвра и маневрирующего корабля прокладываются из общей точки по направлению действительного движения кораблей а вектор относительной скорости прокладывается из крнца вектора объекта манёвра и к концу вектора маневрирующего корабля. 2. Обратное построение: Vк и Vм сходятся в одной точке.
БИЛЕТ №10 1. Предельный курсовой угол. Предельным курсовым углом Q пр объекта маневра называется наибольшеезначение его курсового угла, находясь на котором маневрирующий корабль со скоростью хода меньшей, чем скорость хода объекта маневра, еще может сблизиться с ним на заданное расстояние D зад. Суть вопроса Если объект маневра имеет скорость большую, чем скорость хода, которой маневрирующий корабль может выполнять маневр, то сближение на заданное расстояние не всегда оказывается возможным. Вопрос о возможности такого сближения сводится в конечном итоге к определению того кратчайшего расстояния D кр, на которое маневрирующий корабль может сблизиться с объектом маневра из данной начальной позиции. Условием возможности сближения на заданное расстояние D зад является выполнение неравенства D кр ≤ D зад. Если это неравенство выполняется, то маневрирующий корабль имеет возможность на расстояние даже меньшее чем D зад. И наоборот, если это неравенство не выполняется, то маневрирующему кораблю, как бы он не маневрировал, не удастся приблизиться к объекту маневра даже на расстояние большее, чем заданное, следовательно, на заданное расстояние он тем более сблизиться не сможет. В соответствии с формулой расчета D кр= D 0 sin ( q к0- Q ), вышеуказанное неравенство D кр ≤ D зад примет вид: D 0 sin ( q к0- Q ) ≤ D зад, или что тоже самое sin ( q к0- Q ) ≤ D зад/ D 0; q к0- Q ≤ arcsin D зад/ D 0; q к0 ≤ Q +Δ Q , где Δ Q = arcsin D зад/ D 0, а Q пр= Q +Δ Q . Из последнего выражения видно, что сумма критического курсового угла Q и величина Δ Q , именуемой поправкой критического курсового угла, есть предельный курсовой угол Q пр который является критерием для суждения о возможностях тихоходного корабля при его маневрировании на сближение с быстроходным кораблем. Для расчета величин Q и Δ Q служит таблица № 2.36 Мореходных таблиц (МТ-2000). 2. Общие случаи изменения позиции относительно объекта манёвра (cохранение позиции, изменение дистанции при постоянстве пеленга). А) Сохранение позиции. Суть задачи Сохранение позиции есть маневр маневрирующего корабля на сохранение первоначально заданной позиции при изменении курса объектом маневра. Данная задача может возникнуть при плавании в составе ордера, когда маневрирующий корабль М0, являясь кораблем охранения, имеет заданную позицию по курсовому углу q кзад и расстоянию D зад от объекта маневра (уравнителя) К0, которую он должен все время удерживать (сохранять). Если уравнитель повернет на другой курс, то корабль охранения окажется на курсовом угле уравнителя, отличном от заданного. Чтобы выйти на заданный курсовой угол q кзад, и заданную дистанцию D зад ему надо выполнить маневр на сохранение заданной позиции относительно уравнителя. Б) Изменение дистанции при постоянстве пеленга. Суть задачи Маневр на изменение дистанции до цели применяется для использования своего оружия, для уклонения от оружия противника при различных соотношениях скоростей маневрирующих кораблей. Исходя из сложившейся обстановки маневр выполняется на сближение или удаление на заданную дистанцию. При соотношении скоростей маневрирующих кораблей V м > V к или при V м < V к и q к < Q маневр сближения на заданную дистанцию возможно выполнить, следуя курсом сближения вплотную. Маневр заключается в том, что маневрирующий корабль ложиться на курс, ведущий к сближению с объектом маневра, и следует им до тех пор, пока расстояние между кораблями не сократится до заданной величины, при этом пеленг на объект маневра не меняется, ОБП = 0 и ОВИР = const . Методика решение задачи на маневренном планшете: Выводы по вопросу 1. Маневр применяется в случаях, когда необходимо сблизиться (удалиться) с объектом маневра до заданного расстояния, изменение же пеленга (курсового угла объекта маневра) нежелательно. 2. Данный маневр возможен при соотношении скоростей маневрирующих кораблей V м > V к или при V м < V к и q к ≤ Q .
БИЛЕТ №11 1. Маневрирование на заданной дистанции. Суть задачи Необходимость маневрирования на заданной дистанции, как правило, возникает при ведении разведки или слежении за противником, когда кораблю разведки или слежения необходимо длительно находиться на заданной дистанции поддержания контакта с противником.Чтобы расстояние до объекта маневра оставалось постоянным, необходимо, чтобы ОВИР все время была равна нулю, т.е. V м cosq м + V к cosq к = 0 или V м cosq м = - V к cosq к. Следовательно, курсовой угол маневрирующего корабля q м должен удовлетворять условию: cosq м = - V к / V м × cosq к. Из выше записанных условий следует: БИЛЕТ №12 1.Возможности тихоходного корабля при маневрировании на сближение с быстроходным объектом манёвра. Предельным курсовым углом Q пр объекта маневра называется наибольшее значение его курсового угла, находясь на котором маневрирующий корабль со скоростью хода меньшей, чем скорость хода объекта маневра, еще может сблизиться с ним на заданное расстояние D зад. Суть вопроса Если объект маневра имеет скорость большую, чем скорость хода, которой маневрирующий корабль может выполнять маневр, то сближение на заданное расстояние не всегда оказывается возможным. Вопрос о возможности такого сближения сводится в конечном итоге к определению того кратчайшего расстояния D кр, на которое маневрирующий корабль может сблизиться с объектом маневра из данной начальной позиции. Условием возможности сближения на заданное расстояние D зад является выполнение неравенства D кр ≤ D зад. Если это неравенство выполняется, то маневрирующий корабль имеет возможность на расстояние даже меньшее чем D зад. И наоборот, если это неравенство не выполняется, то маневрирующему кораблю, как бы он не маневрировал, не удастся приблизиться к объекту маневра даже на расстояние большее, чем заданное, следовательно, на заданное расстояние он тем более сблизиться не сможет. В соответствии с формулой расчета D кр= D 0 sin ( q к0- Q ), вышеуказанное неравенство D кр ≤ D зад примет вид: D 0 sin ( q к0- Q ) ≤ D зад, или что тоже самое sin ( q к0- Q ) ≤ D зад/ D 0; q к0- Q ≤ arcsin D зад/ D 0; q к0 ≤ Q +Δ Q , где Δ Q = arcsin D зад/ D 0, а Q пр= Q +Δ Q . Из последнего выражения видно, что сумма критического курсового угла Q и величина Δ Q , именуемой поправкой критического курсового угла, есть предельный курсовой угол Q пр который является критерием для суждения о возможностях тихоходного корабля при его маневрировании на сближение с быстроходным кораблем. Для расчета величин Q и Δ Q служит таблица № 2.36 Мореходных таблиц (МТ-2000). Ную позицию; ► если скорость маневрирующего корабля меньше скорости объекта маневра V м< V к, то его возможности ограничены и об этих возможностях можно судить, построив на маневренном планшете сектор доступных позиций (как его строить, ранее было рассмотрено). Построение сектора доступных позиций позволяет в каждом конкретном случае выяснить, может ли маневрирующий корабль при данном соотношении скоростей занять ту или иную позицию относительно объекта маневра, на какое минимальное расстояние он может с объектом маневра сблизиться или, наоборот, в каком максимальном расстоянии с ним разойтись. Выводы по вопросу Если начальная позиция маневрирующего корабля находится за пределами критического курсового угла, то сближение с быстроходным объектом маневра возможно только на ограниченное расстояние и только с изменением пеленга в сторону увеличения курсового угла объекта маневра. 2.Маневрирующий корабль, имеющий меньшую скорость хода по сравнению со скоростью хода объекта маневра, т.е. V м< V к, может занять любую относительную позицию, находящуюся внутри сектора доступных позиций. . 3.Если q к0 ≤ Q пр, то сближение на заданное расстояние возможно. 4.Если q к0 > Q пр, то сближение на заданное расстояние невозможно. 2. Изменение курса строя поисковым поворотом. Поисковый поворот это такое изменение направления движения строя кораблей, при котором поворот выполняется на значительные углы (>45°) без изменения скорости. Этот способ поворота применяется при поиске подводных лодок корабельными поисково-ударными группами в строю фронта (рис.8). По исполнительному сигналу крайний внешний по отношению к стороне поворота корабль начинает поворот на назначенный курс. Остальные корабли продолжают движение прежним курсом до прихода на линию поворота, которая является биссектрисой угла поворота α, проведенной из точки поворота корабля, первым начавшим поворот под углом α/2 к линии прежнего курса. Дойдя до линии поворота каждый корабль, самостоятельно начинает пово-рот на новый курс. Скорость хода кораблей при выполнении поворота не изменяется. Если до поворота корабли следовали строем фронта влево, то после поворота они окажутся находящимися в строю фронта вправо, и наоборот. Расстояние между кораблями не изменяется.
БИЛЕТ №13 1. Маневрирование кораблей при слежении за тихоходным противником. Расчеты удобнее всего выполнять на маневренном планшете, в относительном движении. 1. Принимаем объект маневра К0 в центре планшета наносим вектор скорости объекта маневра V к, и по начальному пеленгу П0 ( q к0) и дистанции D 0 наносим начальную относительную позицию маневрирующего корабля М'0. 2. Задавшись допустимыми пределами изменения дистанции в ходе маневра, выделяем концентрические окружности планшета соответствующие заданной дистанции D зад, ближе которой маневрирующий корабль не должен сближаться с объектом маневра и D зад+Δ D , где Δ D – допустимое изменение расстояния до объекта маневра. 3. Внутри полученной полосы от начального места маневрирующего корабля прокладываем линии относительных перемещений Sρ 1, Sρ 2 и т.д., так чтобы они являлись хордами окружности радиуса D зад+Δ D и касательными окружности радиуса D зад, т.е. лежали внутри полосы допустимых изменений расстояния до объекта маневра. 4. При центре планшета строим треугольник скоростей, для чего из конца вектора скорости объекта маневра V к проводим векторы относительной скорости Vρ 1 Vρ 2 и т.д., параллельные соответствующим линиям относительных перемещений Sρ 1, Sρ 2 и т.д., до пересечения их с окружность равной скорости маневрирующего корабля V м, соединив полученные точки с центром планшета получим частные курсы маневрирующего корабля Км1, Км2, и т.д. 5. Снимаем с планшета величины относительных перемещений Sρ 1, Sρ 2,… Sρn , векторов относительной скорости Vρ 1, Vρ 2,… Vρn , рассчитываем время лежания маневрирующего корабля на каждом частном курсе Км1, Км2,… Км n : t 1= S ρ 1/ V ρ 1, t 2 = S ρ 2 / V ρ 2… tn = S ρn / V ρn . Выводы по вопросу 1. При слежении за тихоходным противником, т.е. при V м > V к и V м / V к >1 удержание постоянной дистанци возможно на любых курсовых углах объекта маневра. Задачей слежения является длительное нахождение маневрирующего корабля на дистанции поддержания контакта D к и кроме того удержание назначенной позиции в диапазоне дистанций и в пределах изменения курсового угла объекта маневра q к. Суть задачи состоит в том, что маневрирующему кораблю, находящемуся в начальный момент по пеленгу П0 и дистанции D 0 от объекта маневра (вместо пеленга может указываться начальный курсовой угол объекта маневра q к0), необходимо в кратчайший срок занять Эта задача относится к числу наиболее часто встречающихся при выполне-нии тактических расчетов в обеспечении применения оружия, в особенности торпедного, использование которого ограничено не только расстояниями, но и курсовыми углами цели.
Выводы по вопросу Маневрирование для изменения позиции маневрирующего корабля относительно объекта маневра в кратчайший срок обеспечивает наиболее быстрое из всех возможных способов сокращения (увеличения) дистанции до заданной величины. Если скорость маневрирующего корабля меньше скорости объекта маневра, то задача может не иметь решения или иметь два решения, тогда из двух решений выбирается то, которое ведет к выполнению поставленной задачи в меньший срок. БИЛЕТ №14 1. Маневрирование кораблей при слежении за быстроходным противником Суть задачи При слежении маневрирующего корабля за быстроходным объектом маневра, т.е. при V м< V к необходимо прежде всего установить, какими курсами долследовать маневрирующий корабль и время лежание на каждом из них, чтобы в течение возможно более длительного времени расстояние до объекта маневра не уменьшалось меньше, чем до величины D зад, и не увеличивалось больше, чем до величины D зад+Δ D . Выводы по вопросу 1. В условиях выполнения задачи слежения за быстроходным противником, при V м / V к <1, возможность удерживать его на постоянной дистанции слежения существует лишь при ограниченных значениях курсового угла объекта маневра. 2. При решении задачи маневрирования при слежении за быстроходным объектом относительная позиция маневрирующего корабля М'3 в момент окончания маневра, центр планшета и конец вектора скорости маневрирующего корабля V м3 на последнем этапе маневра должны лежать на одной прямой.
2. Изменение курса строя способом кратчайших расстояний. Поворот способом кратчайших расстояний называется маневр для измене-ния курса строя, при котором корабли строя поворачивают «все вдруг» на рассчитанный для каждого корабля курс, которым выходят на линию ново-го строя, после чего ложатся на назначенный курс (рис.9). Уравнитель ложится на кратчайший курс и уменьшает ход до малого, остальные корабли ложатся на рассчитанные курсы К2, К3, К4, К5 для выхода на линию нового курса, при этом корабли внешней стороны поворота, считая от середины строя (точка А), идут самым полным ходом, а корабли внутренней стороны поворота – средним ходом, средний корабль – полным ходом. От флангового корабля (уравнителя) внутренней стороны поворота проводится линия поворотов под углом α, равным величине угла отворота на новый курс. С выходом на линию отворотов каждый корабль самостоятельно ложится на новый курс, а с занятием своего места в строю дает малый ход. БИЛЕТ №15 1. Маневрирование для уклонения от тихоходного объекта манёвра. Суть задачи Для уклонения от сближения на D зад объекта маневра, имеющего меньшую скорость, чем маневрирующий корабль, надо лечь на такой курс, чтобы как ни маневрировал объект маневра, он не мог бы сблизиться с маневрирующим кораблем на расстояние меньшее или хотя бы равное D зад. Известно, что корабль с меньшей скоростью хода может сблизиться на заданное расстояние с кораблем, имеющим большую скорость хода, в том случае, если курсовой угол последнего будет меньше или равен предельному курсовому углу. Следовательно, для того чтобы объект маневра не мог сблизиться с уклоняющимся от него маневрирую-щим кораблем на расстояние, меньшее, чем D зад, маневрирующий корабль должен выбрать курс с таким расчетом, чтобы его курсовой угол q м0 был больше или равен предельному курсовому углу Q пр, т.е. должно быть соблюдено условие: q м0 = Q пр, где Q пр = Q + Δ Q , sinQ = V к/ V м, sinΔQ = D зад/ D 0. Предположим, что начальное положение кораблей определяется точками К0 – объект маневра и М0 – маневрирующий корабль, начальным расстоянием между ними D 0 и скоростью хода их V к и V м, причем V м > V к. Искомыми элементами при решении задачи уклонения от тихоходного объекта являются: → курс для уклонения; → угол отворота от пеленга на объект маневра; → сектор опасных курсов; → время окончания маневра уклонения. 2. Изменение курса ордера способом захождения. Поворот способом захождения (рис.3). Сущность поворота в том, что каждый корабль ордера изменяет курс на одной и той же линии, называемой линией поворота. Линия поворота прокладывается через точку поворота головного корабля охранения под углом, равным половине угла изменения курса (α/2), к линии, перпендикулярной старому курсу ордера. Способ захождения наиболее приемлем при изменении курса до 60º.
Порядок выполнения - по сигналу флагмана головной корабль, не изменяя хода, поворачивает на новый курс; - корабли охранения, внешние относительно стороны поворота, увеличива-ют ход до самого полного, а внутренние уменьшают ход до малого и следуют курсом до линии поворота; - придя на линию поворота, каждый корабль самостоятельно ложится на заданный курс и, заняв свое место в ордере, дает полный ход; - охраняемый корабль, дойдя до места поворота головного корабля охране-ния, ложится на новый курс, следуя в кильватер головному кораблю, не изменяя скорости хода.
БИЛЕТ №16 1. Сближение с объектом манёвра на заданное расстояние в кратчайший срок. а) в кратчайший срок Суть задачи Сущность задачи сближения на заданное расстояние в кратчайший срок заключается в том, что маневрирующий корабль находясь в начальный момент на курсовом угле объекта маневра q к0 и расстоянии D 0 должен лечь на такой курс, чтобы в минимально возможное при данных скоростях кораблей время сблизиться с объектом маневра на заданное расстояние D зад. При решении этой задачи необходимо учитывать следующие закономерности: ► в момент окончания маневра объект маневра должен находиться у маневрирующего корабля прямо по носу, т.е. курсовой угол маневрирую-щего корабля q м на объект маневра должен быть равен нулю; ► курс сближения на заданное расстояние может быть представлен как курс сближения с некоторой вспомогательной точкой А, движущейся со скоростью, равной скорости объекта маневра, и находящейся позади него в расстоянии х, где х = V к/ V м × D зад; 2. Определение элементов движения цели по пеленгам и дистанциям. Суть решения задачи Путем нанесения последовательных положений объекта маневра, ориентированных относительно своего корабля пеленгами и дистанциями, определяется курс объекта и величина его пути за время наблюдений. Затем по величине его пути за время наблюдений определяется скорость хода объекта маневра. Достоинства метода - наглядность отображения обстановки в районе плавания; - удобство ведения боевой прокладки; - возможность наглядно представить изменения тактической обстановки; - нет необходимости прерывать определение ЭДЦ при изменениях курса и скорости своего корабля. Так как по своему содержанию данная задача относится к числу задач II типа (активного маневрирования), то решение ее легко осуществимо путем построения треугольников позиций и скоростей (перемещений), т.е. методом относительного движения на маневренном планшете (рис. БИЛЕТ №17 1. Сближение с объектом манёвра на заданное расстояние в заданный срок. б) в заданный срок Суть задачи Эта задача отличается от предыдущей тем, что время, в течение которого должен быть выполнен маневр, задано, а искомыми являются не только курс маневрирующего корабля, но и скорость, которой он должен следовать, т.е. необходимо найти оба параметра, определяющие вектор скорости V м. Суть задачи на расчет маневра сближения на заданную дистанцию в заданный срок состоит в том, что маневрирующему кораблю необходимо в назначенный момент времени t находится на заданной дистанции D зад от объекта маневра. Данное уклонение возможно при условии, что маневрирующий корабль заблаговременно получил сведения о местонахождении, курсе и скорости быстроходного объекта маневра и может выбрать курс уклонения с расчетом разойтись с ним на заранее избранном расстоянии. Для того, чтобы разойтись с быстроходным объектом на максимальном расстоянии маневрирующему кораблю необходимо лечь на такой курс, чтобы линия относительного перемещения, проведенная от его начальной позиции прошла в наибольшем возможном расстоянии от объекта маневра, т.е. лечь на курс, перпендикулярный стороне критического курсового угла. БИЛЕТ №20 1. Пересечение курса быстроходного объекта манёвра по носу в максимальном расстоянии. Суть вопроса При маневрировании относительно быстроходного объекта, когда V м< V к, пересечение курса быстроходного объекта манёвра по носу в максимальном расстоянии, возможно выполнить только при условии, что начальная пози-ция маневрирующего корабля находится внутри критического курсового угла Q , т.е. q к0< Q , где sinQ = V м/ V к. Следовательно, чтобы пересечь курс объекта маневра Кк впереди в максимальном расстоянии, маневрирующий корабль должен лечь на курс Км перпендикулярный границе критического курсового угла, т.к. только в этом случае линия его относительного движе-ния Кρ будет параллельна границе критического курсового угла и пересечет курс объекта маневра впереди в максимальном расстоянии Dmax .
2. Определение элементов движения цели по четырём пеленгам. Суть решения задачи Обнаружив цель (объект маневра) маневрирующий корабль ложится на курс, равный пеленгу на цель (рис.5). На этом курсе при возможно меньшей скорости хода измеряются три пеленга на цель. В момент измерения третьего пеленга маневрирующий корабль увеличивает скорость хода и начинает поворот на новый курс, на котором измеряется четвертый пеленг на цель. При этом промежутки времени между измерениями все четырех пеленгов должны быть одинаковыми.
3.Условием, повышающим степень точности определения дистанции до объекта маневра с помощью четвертого пеленга, будет такое маневрирование, при котором линия четвертого пеленга на объект маневра будет пересекать линию фиктивного пеленга под углом, близким к 90°.
БИЛЕТ №21 1. Пересечение курса быстроходного объекта манёвра по корме в минимальном расстоянии.
а) по корме в минимальном расстоянии: Суть вопроса Задача пересечения курса быстроходного объекта маневра по корме в минимальном расстоянии по существу является составной частью задачи сближения на кратчай-шее расстояние. Т.к. скорость хода маневрирующего корабля М меньше, чем ско-рость хода объекта маневра К, то очевидно, что после сближения на кратчайшее расстояние корабль М не сможет удерживать эту дистанцию. Если маневрирующий корабль будет продолжать маневр курсом, перпендикулярным границе критического курсового угла, то в результате он пересечет курс объекта маневра по корме в воз-можно минимальном расстоянии. Данная задача имеет смысл, при V м< V к и q к0> Q , т.е. при нахождении корабля М за пределами критического курсового угла. В этом слу-чае, чтобы пересечь курс быстроходного объекта маневра по корме в минимальном расстоянии, корабль М должен маневрировать курсом, линия которого составляет прямой угол с границей критического курсового угла, т.к. только в этом случае линия относительного движения его будет располагаться по границе сектора доступ-ных позиций и пересечет курс объекта по корме в минимальном расстоянии Dmin . На маневренном планшете: ● Начальную позицию объекта маневра К0 принимаем в центре планшета и считаем его условно неподвижным. ● Ориентируем планшет и избираем масштаб для построения треугольников скоростей и позиций. ● По начальному пеленгу П0 и дистанции D 0 наносим начальную позицию маневрирующего корабля М0 (рис.10). ● При центре планшета строим прямоугольный треугольник скоростей с крити-ческим курсовым углом Q , для чего по курсу объекта маневра Кк наносим век-тор скорости V к и из конца этого вектора проводим касательную к окружности, радиус которой равен скорости маневрирующего корабля V м, при чем проводим ту касательную, при которой линия относительного перемещения, проведенная из начальной позиции маневрирующего корабля М0 параллельно вектору отно-сительной скорости Vρ , пройдет в минимальном расстоянии от центра планше-та. Из центра планшета проводим перпендикуляр на касательную, который и определит искомый курс маневрирующего корабля Км, направление касатель-ной – относительный курс Кρ, а длина от конца вектора скорости V к до конца вектора скорости V м определит величину относительной скорости Vρ . ● Строим треугольник позиций М0К0М'1, для чего из начальной позиции манев-рирующего корабля М0, параллельно касательной, проводим линию относитель-ного курса Кρ до пересечения ее с линией курса объекта маневра Кк в точке М'1, которая определяет новую относительную позицию маневрирующего корабля в конце маневра. Сторона треугольника позиций К0М'1= Dmin , а сторона М0М'1= Sρ , измеряем их величины. ● Рассчитываем время маневра: t = Sρ / Vρ . 2. Изменение курса ордера способом разделения.
Поворот способом разделения (рис.4). Сущность способа состоит в том, что корабли охранения во время поворота разделяются на две группы и изменя-ют после поворота свои тактические номера и соответствующие им позиции относительно уравнителя. Разделение происходит на линии разделения, которая проводится через центр ордера в момент начала поворота. Как правило, линия разделения совпадает с новым курсом ордера, однако в отдельных случаях, в целях обеспечения безопасности маневрирования линия разделения может назначаться флагманом не параллельно линии нового курса. Поворот способом разделения допускает изменение курса при больших углах отворота (более 60º) и позволяет производить его в кратчайший срок. При плавании ночью и в плохую видимость изменять курс способом разделения не рекомендуется.
Порядок выполнения - по сигналу флагмана на всех кораблях охранения определяются новые позиции и рассчитываются курсы выхода на них; - по исполнительному сигналу корабли охранения одновременно ложатся на рассчитанные курсы и маневрируют скоростями, чтобы занять позиции к моменту окончания поворота уравнителя на новый курс; - охраняемые корабли, не изменяя скорости хода, следуют прежним курсом и после прохода расстояния, равного удалению ближнего охранения от центра ордера, ложатся на новый курс; - заняв позиции относительно уравнителя на новом курсе, корабли охранения самостоятельно ложатся на новый курс и удерживают места в ордере. Корабль охранения №1 идет в позицию №6 и получает соответственно этому №6 в охранении после поворота. Аналогично ему изменяют свои позиции и номера и остальные корабли охранения: №2 на №5, №3 на №4, №4 на №3, №5 на №2, №6 на №1. Поворот способом разделения имеет преимущество перед поворотом способом захождения при значительных углах поворота, так как он сокращает общее время маневра за счет назначения новых позиций кораблям охранения, что уменьшает длины путей, проходимых ими при выполнении поворота. Вместе с тем поворот способом разделения более сложен в исполнении, так как корабли охранения должны поворачивать в разные стороны, их курсы для занятия новых позиций могут пересекаться, что не исключает возможности опасного сближения. БИЛЕТ №22 1.Сближение с быстроходным объектом манёвра на кратчайшее расстояние. Суть вопроса Необходимость решение данной задачи возникает в условиях, когда скорость манев-рирующего корабля меньше скорости объекта маневра и курсовой угол q к0> Q , т.е. позиция тихоходного маневрирующего корабля находится за пределами критическо-го курсового угла, а нужно сблизиться на кратчайшее расстояние с быстроходным объектом маневра. В этих условиях курс сближения на кратчайшее расстояние с объектом маневра, на котором наилучшим образом реализуются скоростные возмож-ности маневрирующего корабля по сокращению дистанции до быстроходного объек-та маневра, является курс, перпендикулярный ближайшей границе критического курсового угла, построенного при объекте маневра. Вектор скорости маневрирующе-го корабля V м, удовлетворяющий условию сближения на кратчайшее расстояние, также должен быть перпендикулярен стороне критического курсового угла. Курс маневрирующего корабля Км для сближения на кратчайшее расстояние может быть найден по формуле Км = Кк + Q - 90°, если маневрирующий корабль находится на правом борту объекта маневра, или Км = Кк - Q + 90°, если маневрирующий корабль находится на левом борту объекта маневра. Величина угла отворота q м0 от пеленга на объект маневра в начале маневра рассчи-тывается по формуле q м0 = 90° - ( q к0 – Q ). Кратчайшее расстояние D кр сближения с быстроходным объектом маневра рассчи-тывается по формуле D кр = D 0× sin ( q к0 – Q ). Чтобы сблизиться с быстроходным объектом маневра на минимальную дистанцию D кр, маневрирующий корабль должен пройти расстояние, равное S м = D 0× cos ( q к0 – Q )× tgQ . Суть задачи Ошибки определения ЭДЦ, а также ошибки вычислений и геометрических построений, выполняемых при расчетах, ведут к тому, что фактическое направление относительного перемещения отличается от расчетного, т.е. маневрирующий корабль выходит в назначенную ему позицию относитель-но объекта маневра с некоторыми ошибками. Осуществляя в ходе маневра контроль за правильностью выполнения маневра, изменяя соответствую-щим образом курс или скорость маневрирующего корабля, можно умень-шить величину ошибок определения ЭДЦ, добиться более точного осуществ-ления маневра. Для этого надо периодически определять относительное положение маневрирующего корабля относительно объекта маневра. Проще всего это осуществляется путем измерения пеленгов и расстояний до объекта маневра, если корабли находятся в пределах дальности действия радиолокационных станций. Нанеся несколько относительных позиций маневрирующего корабля на маневренном планшете (рис.8), точки 1,2,3, можно убедиться, что направление и скорость относительного перемещения соответствуют расчетным или, наоборот, отличаются от них. Если расхожде-ние значительно, следует произвести корректировку маневра. Это сводится в конечном итоге к выполнению заново расчетов намеченного маневра в соответствии с установленными в ходе его выполнения сведениями об ЭДЦ и относительной позиции маневрирующего корабля.
Если осуществляется маневр, при выполнении которого пеленг должен оставаться постоянным (сближение вплотную, сближение с объектом маневра на заданное расстояние курсом сближения вплотную и т.д.), то контроль маневра сводится к наблюдению за пеленгом на объект маневра. Постоянство пеленга говорит о правильности выполнения маневра. Если пеленг меняется на нос маневрирующего корабля, то надо изменить курс в сторону движения объекта маневра или увеличить скорость хода. При изменении пеленга на корму необходимо изменить курс под корму объекта маневра или уменьшить скорость. Если скорость маневрирующего корабля больше скорости объекта маневра, то для корректуры курса маневра может быть применен способ подбора курса. При этом используется метод последовательных прибли-жений, когда первая корректура курса делается равной 5° или 10° в ту сторону, в которую сместить относительные позиции, чтобы приблизить их к линии относительного курса. Так, если наблюдается систематичес-кое смещение относительных позиций объекта маневра влево от расчет-ного курса, то курс маневрирующего корабля изменяют вправо на 10°. Получив в дальнейшем отклонение относительных позиций вправо, отворачивают влево на 5° и т.д.. Уточнение курса прекращают, введя последнюю корректуру в 1° или 2°. БИЛЕТ №23 1.Удаление от объекта манёвра на заданное расстояние в кратчайший срок. Суть задачи Задача удаления на заданное расстояние от объекта маневра в кратчайший срок подобна маневру сближения заданное расстояние от объекта маневра в кратчай-ший срок и может быть сведена к удалению от некоторой вспомогательной точки А при постоянстве пеленга на нее. Суть задачи в том, что в момент конца маневра объект маневра должен находиться у маневрирующего корабля прямо по корме. Следовательно, курс для удаления от объекта маневра на заданное расстояние в кратчайший срок совпадает с курсом удаления при постоянстве пеленга от некоторой вспомогательной точки А, движущейся впереди объекта маневра в расстоянии от него, равном х = V к/ V м × D зад.
Для контроля правильности решения задачи при центре планшета строим треугольник скоростей, для этого по курсу объекта маневра Кк откладываем вектор скорости V к и из его конца проводим прямую параллельную линии относительного курса Кρ до пересечения с окружностью равной скорости маневрирующего корабля V м и полученную точку соединяем с центром планшета, направление вектора скорости V м дает курс маневрирующего корабля на удаление на заданное расстояние в кратчайший срок, вектор скорости V м должен совпадать с линией К0М'1. 2.Определение элементов движения цели способом постоянства пеленга. г) Определение ЭДЦ способом постоянства пеленга Суть решения задачи В случае маневрирования при постоянстве пеленга на объект маневра общее боковое перемещение (ОБП) равно нулю, следовательно, боковое перемеще-ние каждого корабля численно равны, но противоположны по знаку, т.е. V к sinq к = - V м sinq м. Очевидно, что если при маневрировании имеет место постоянство пеленга, то боковое перемещение объекта маневра будет известно с той же точностью, с какой известно боковое перемещение маневрирующего корабля. Зная боковое перемещение объекта маневра, можно задавшись скоростью хода его как элементом известным, определить курсовой угол объекта маневра или задавшись курсовым углом его как элементом известным, определить скорость хода объекта маневра по формулам соответственно: sinq к = - V м sinq м / V к или V к= - V м sinq м / sinq к. При определении ЭДЦ способом, основанном на постоянстве пелен-га, можно сделать вывод, что при острых курсовых углах объекта маневра наиболее точно можно определить его курсовой угол, а при траверзных курсовых углах объекта маневра - его скорость.
БИЛЕТ № 1 1) Основные понятия, определения, виды и способы маневрирования. Основные понятия и определения Маневр – это движение корабля (соединения кораблей) с целью занятия или изменения своего положения относительно какого-либо объекта, а процесс выполнения маневра называется маневрированием. Маневр корабля (соединения кораблей), применяемый в боевых действиях на море, для занятия, удержания или изменения своего положения относительно противника с целью создания выгодных условий для наиболее эффективного использования своего оружия и технических средств, а также для затруднения маневра противника, является маневром тактическим и выполнение такого маневра называется тактическим маневрированием. Маневр корабля (соединения кораблей), применяемый в боевых действиях на море, для занятия, удержания или изменения своего положения относительно противника с целью создания выгодных условий для наиболее эффективного использования своего оружия и технических средств, а также для затруднения маневра противника, является маневром тактическим и выполнение такого маневра называется Координаты, определяющие положение маневрирующего корабля относительно объекта маневра, т.е. его позицию – пеленг, курсовой угол и дистанция – называют-ся элементами позиции. 2) Основные способы изменения курса строя кораблей, их достоинства и недостатки. При совместном плавании кораблей в строях изменение курса строя может производиться следующими способами: - последовательного поворота; - все вдруг; - захождения; - двух полуповоротов; - поискового поворота; - кратчайших расстояний. Последовательным поворотом называется такое изменение движения кораблей, при котором каждый последующий корабль поворачивает на новый курс в точке поворота предыдущего (головного) корабля, сохраняя при этом свое место в строю (рис.4). Последовательный поворот является простейшим способом маневра для изменения линии строя и применяется только в строю кильватера. Каждый корабль начинает и заканчивает маневр поворота самостоятельно. Для лучшего сохранения линии строя каждый последующий корабль при повороте должен удерживать форштевень на внутренней (в сторону циркуляции) кромке кильватерной струи впереди идущего корабля. Поворотом «все вдруг» называется такое изменение направления движения строя (ордера) кораблей, при котором все корабли одновременно поворачи-вают на новый курс, причем пеленг и расстояние от любого корабля до уравнителя остаются неизменными (рис.5). Данный способ применяется для быстрого изменения направления движения строя (ордера) кораблей, что имеет важное значение при уклонении соединения от атак подводных лодок и торпедных катеров противника. Изменение курса строя производится в такой последовательности: - по сигналу флагмана крайний внутренний корабль №5 строя поворачивает на новый курс и дает малый ход; - остальные корабли следуют прежним курсом до лини поворота АБ, причем корабли №1 и №2, внешние по отношению к стороне поворота, увеличивают ход до самого полного, средний корабль № 3 идет полным ходом, а корабль №4, находящийся в части строя, внутренней по отношению к стороне поворота, уменьшает ход до малого; с приходом на линию поворота АБ каждый корабль самостоятельно начинает поворот на назначенный курс и когда пеленг на средний корабль строя (уравнитель) станет равен назначенному, дает полный ход. Поворот способом двух полуповоротов называется такое изменение направ-ления движения строя (ордера), при котором корабли дважды поворачивают на половину общей величины изменения курса при общих для всех кораблей линии начала поворота и линии конца поворота (рис.7). В отличие от поворотов захождения при повороте способом двух полупово-ротов скорости движения кораблей на промежуточных курсах строго регла-ментированы наличием линии перемены ходов, что обеспечивает бóльшую точность и безопасность поворота, хотя при этом несколько увеличивает время маневра. Этот способ чаще всего применяется при плавании в строю фронта. Изменение курса способом двух полуповоротов производится в такой последовательности: - по сигналу флагмана головной корабль №1 поворачивает на угол, равный половине угла изменения курса α/2, остальные корабли совершают поворот самостоятельно с приходом на линию первого полуповорота ОВ (если корабли идут строем фронта, то все корабли строя поворачивают «все вдруг» на угол, равный половине угла изменения курса α/2); - крайний внутренний (относительно стороны поворота) корабль №1(А) сразу после окончания поворота дает малый ход, корабль №2, находящийся от средней точки С в сторону крайнего внутреннего корабля №1, дает сред-ний ход, корабли №3 и №4, находящиеся от средней точки строя С в сторону крайнего внешнего корабля №4, продолжают после поворота идти полным ходом; - на линиях перемены ходов АС' и СВ' производится изменение ходов внут-ренним кораблям №2 со среднего на малый, а внешним кораблям №3 с полного на средний; - с выходом на линию второго полуповорота ОВ' каждый корабль самостоя-тельно ложится на объявленный курс и дает полный ход. Поисковый поворот это такое изменение направления движения строя кораблей, при котором поворот выполняется на значительные углы (>45°) без изменения скорости. Этот способ поворота применяется при поиске подводных лодок корабельными поисково-ударными группами в строю фронта (рис.8). По исполнительному сигналу крайний внешний по отношению к стороне поворота корабль начинает поворот на назначенный курс. Остальные корабли продолжают движение прежним курсом до прихода на линию поворота, которая является биссектрисой угла поворота α, проведенной из точки поворота корабля, первым начавшим поворот под углом α/2 к линии прежнего курса. Дойдя до линии поворота каждый корабль, самостоятельно начинает пово-рот на новый курс. Скорость хода кораблей при выполнении поворота не изменяется. Если до поворота корабли следовали строем фронта влево, то после поворота они окажутся находящимися в строю фронта вправо, и наоборот. Расстояние между кораблями не изменяется. Поворот способом кратчайших расстояний выполняется по исполнительно-му сигналу флагмана. На время поворота кораблем-уравнителем становится фланговый корабль внутренней стороны поворота. БИЛЕТ №2 1. Основные элементы маневрирования, дать понятия и определения. Величины, характеризующие изменение положения маневрирующего корабля отно-сительно объекта маневра за одну минуту времени в маневрировании, называются основными элементами маневрирования (ОЭМ) и им присвоены собственные наи-менования: ВИР, БП и ВИП. ВИР – величина изменения расстояния (дистанции) между маневрирующим кораб-лем и объектом маневра за одну минуту времени, выраженная в кабельтовых и рас-считывается по формуле: ВИР = - 1/6 V ×с osq БП – величина перемещения маневрирующего корабля по направлению, перпенди-кулярному линии пеленга на объект маневра, за одну минуту времени, выраженнаяв кабельтовых и рассчитывается по формуле: БП = 1/6 V × sinq ВИП - величина изменения пеленга с маневрирующего корабля на объект маневраза одну минуту времени, выраженная в градусах и рассчитывается по формуле: ВИП = БП/ D ×57.3º ВИР, БП и ВИП являются основными элементами маневрирования, характеризую-щими процесс изменений позиции маневрирующего корабля относительно непод-вижного объекта маневра, т.е. при одностороннем маневрировании. В случае, когда два корабля маневрируют один относительно другого, изменения основных элемен-тов маневрирования зависят от перемещения обеих кораблей. Тогда основными элементами двухстороннего маневрирования являются: ОВИР, ОБП, ВИП . ОВИР – общая величина изменения расстояния : ОВИР = ВИРк + ВИРм = (- 1/6 V к× cosq к) + (-1/6 V м× cosq м) = - 1/6 Vρ × с osqρ Максимальное значение ОВИР имеет при q м = q к = 0° или 180º, т.е. когда корабли идут навстречу друг другу со скоростью, равной сумме векторов скоростей ( V к + V м), либо удаляются друг от друга с той же скоростью. Наименьшее значение ОВИР будет в случае, когда ВИР обеих кораблей будут равны и противоположны по знаку. ОБП – общая величина бокового перемещения:ОБП = БПк + БПм = 1/6 V к× sinq к + 1/6 V м× sinq м = 1/6 Vρ × sinqρ ОБП равно алгебраической сумме боковых перемещений обеих кораблей и зависит от скоростей и курсовых углов маневрирующих кораблей и их бортов, которыми они обращены друг к другу. Когда корабли маневрируют одноименными бортами, ОБП по абсолютной величине больше, чем при ма-неврировании разноименными ботами. Это происходит потому, что в первом случае ОБП равно сум-ме боковых перемещений кораблей, а во втором – разности. Наибольшее значение ОБП будет при маневрировании кораблей одноименными бортами, когда q м = q к = 90°, и наименьшее значение – при q м = q к = 0° или 180º, где ОБП = 0. ВИП – величина изменения пеленга: ВИП = (БПк + БПм)/ D = 0БП/ D ×57.3º ВИП зависит от скоростей, курсовых углов и расстояния между кораблями.С увеличением дистанцииВИП уменьшается. Знак ВИП одинаков со знаком ОБП. Когда корабли маневрируют разноименнымибортами и их БП равны по абсолютной величине и противоположны по знаку, т.е. БПм = - БПк, это указывает на то, что корабли маневрируют при постоянстве пеленга, в этом случае ВИП = 0. Наибольшее значение ВИП имеет при маневрировании кораблей одноименными бортами. Геометрический смысл основных элементов маневрирования ВИРм (ВИРк) – величина проекции вектора скорости корабля М (корабля К)на линию пеленга между кораблями. При носовых (острых) курсовых углахкорабля М (корабля К) величина ВИРм (ВИРк) отрицательна, при кормовых (тупых) курсовых углах –положительна. БПм (БПк) – величина проекции вектора скорости корабля М(корабля К) на направление, перпендикулярное линии пеленга. При курсовых углах корабля М (корабля К) правого борта величина БПм(БПк) положительна, левого борта– отрицательна. ОВИР, ОБП – проекция вектора относительной скорости на те же направления.ОВИР положительна – расстояние между кораблями увеличивается, отрица-тельна – расстояние уменьшается. ОБП положительно – пеленг между кораб-лями меняется по часовой стрелке, отрицательно – пеленг меняется против часовой стрелки. ВИП имеет тот же знак, что и ОБП. 2. Маневрирование кораблей в ордерах: способы построения ордеров.Ордером соединения (группы кораблей) называется точнорегламентированное по направлениям и расстояниям взаимное расположение кораблей, маневрирующих совместно в бою (боевой ордер) или на переходе морем (походный ордер). Походные и боевые ордера должны обеспечивать: ◙ круговое наблюдение радиотехническими и зрительными средствами; ◙ оповещение о воздушных, надводных и подводных целях ; ◙ наиболее эффективное использование корабельных технических средств и оружия; ◙ уменьшение эффективности воздействия оружия противника, атакующего соединение; ◙ свободу маневра соединения для уклонения от противника; ◙ удобство управления соединением. Вопросы эффективного использования корабельных технических средств и оружия, также уменьшения эффективности применения оружия противником решаются в основном соответствующим расположением кораблей в ордере. Основной формой построения современных ордеров является круговой ордер. Основной формой построения современных ордеров является круговой ордер. Круговым ордером (рис.1) называется ордер, в котором охраняемые корабли следуют в простом или сложном строю, а корабли охранения располагаются на концентрической окружности вокруг них.
Центром ордера называется центр концентрических окружностей, на которых располагаются охраняемые корабли и корабли охранения. Основные параметры, характеризующие расположение кораблей в ордере: ◘ расстояние между охраняемыми кораблями; ◘ удаление линии охранения от охраняемых кораблей; ◘ расстояния между кораблями охранения на линии охранения; ◘ количество охраняемых кораблей и кораблей охранения. Расстояние между охраняемыми кораблями определяется главным образом исходя из требований уменьшения эффективности ударов противника. На переходе морем и в бою корабли могут подвергаться атакам при использова-нии противником различных видов оружия, которое может иметь как обыч-ный, так и атомный заряды. Расстояние между охраняемыми кораблями должно быть таким, чтобы уменьшить или исключить возможность нахождения двух соседних кораб-лей в одном круге рассеивания бомб и торпед или возможность одновремен-ного поражения этих кораблей взрывом атомной бомбы. При отсутствии атомной угрозы расстояние между охраняемыми кораблями должно быть не менее диаметра круга рассеивания бомб. При наличии атомной угрозы, сле-дует учитывать радиус поражающего действия взрывной волны, проникаю-щей радиации и радиоактивного заражения. Удаление линии охранения от охраняемых кораблей должно быть таким, чтобы обеспечивалась наибольшая эффективность применения кораблями своего оружия для обороны охраняемых кораблей от ударов противника. Различные виды обороны (ПВО, ПЛО, ПКО, ПМО и т.д.) предъявляют раз-личные требования к удалению линии охранения от охраняемых кораблей. Поэтому при определении удаления линии охранения от охраняемых кораб-лей следует комплексно решать задачи обороны соединения от всех возмож-ных видов нападения противника. Поскольку основной задачей обороны соединения кораблей на переходе морем является сохранение кораблей (судов), выполняющих главную задачу, ради которой совершается переход, то в качестве основного критерия эффективности обороны, а следовательно, и построения ордера, можно принять математическое ожидание числа не уничтоженных охраняемых кораблей, которое рассчитывается по формуле: Количество кораблей охранения и расстояния между ними на линии охранения являются взаимосвязанными величинами. В общем случае, исходя из равновероятности атак противника с любого направления, корабли охранения располагаются на круговой линии охранения на равных расстояниях друг от друга. Тогда (рис.1) d =2π ( r + R ) / N 0, где N 0 – число кораблей охранения; ( r + R ) – расстояние от центра ордера до линии кораблей охранения. При построении ордера позиции охраняемых кораблей и кораблей охранения назначаются относительно центра ордера. Свои места в ордере они удерживают по пеленгам и расстояниям до одного из кораблей, назначенного уравнителем. Порядок построения ордера на маневренном планшете ► считая центр ордера совпадающим с центром планшета, по курсовым углам и расстояниям от него нанести назначенные позиции охраняемых кораблей и кораблей охранения; ► измерить курсовой угол q у и расстояние, в котором должен находиться свой корабль относительно уравнителя; ► рассчитать угол равнения q рав и пеленг, на котором корабль должен удерживаться относительно уравнителя: q рав = 180º - q у; Прав = Ку ± q рав, где Ку – курс, на котором производится построение ордера. БИЛЕТ №3 1. Метод относительного движения.Метод относительного движения В теоретической механике движение точки по отношениюк подвижной системе координат называется относительным движением. Движение самой системы координат называется переносным движением. Движение той же точки относительно осей координат, условно принятых за неподвижную систему, называется абсолютным движением. Из кинематики известно, что вектор абсолютного переме-щения равен геометрической сумме векторов относитель-ного и переносного перемещения и скорость абсолютного движения также равна геометрической сумме скоростей относительного и переносного движений, т.е. V абс = V отн + V пер Для применения общей теории относительного движения к вопросам маневрирования кораблей вводятся следующие условности ► Географические координаты будем рассматривать как неподвижную систему координат, т.к. собственное движение Земли в рассматриваемых вопросах роли не играет. ► За начало подвижной системы координат будем принимать объект маневра, и тогда собственное движение объекта маневра относительно местности будет пере-носным, собственное движение манерирующего корабля относительно местностибудет абсолютным, а относительно объекта маневра относительным движением .Сущность метода относительного движения Изучение изменения положения корабля М относительно корабля К, как следствия перемещения кораблей М и К относительно земной поверхности со скоростями V м и V к , можно заменить изучением изменения положения корабля М, как следствия его перемещения относительно корабля К с относительной скоростью V ρ . Решение задач прямолинейного маневрирования методом относитель-ного движения сводится в конечном итоге к построению треугольников позиций и скоростей (путей). Треугольник путей (перемещений) называется треугольник, сторонами которого являются векторы перемещений двух маневрирующих относительно друг друга кораблей и вектор их относительного перемещения. Если промежуток времени t , для которого построен треугольник путей, взять достаточно малым и принять за единицу, то треугольник путей обратится в треугольник скоростей и стороны его будут представлять собой векторы скоростей кораблей V к и V м и вектор относительной скорости Vρ . Треугольник путей и треугольник скоростей подобны и отношение соответствующих сторон их равно t , т.е. S к / V к = S м / V м = Sρ / Vρ = t Треугольником позиций называется такой треугольник, вершинами которого являются позиции кораблей, маневрирующих относительно друг друга, а сторонами – расстояния между кораблями, отложенные по линиям начального и конечного пеленгов, и вектор относительного перемещения. 2. Маневрирование кораблей в строях: виды маневрирования и меры безопасности от столкновений. Строем называется простейший ордер , в котором корабли расположены на одной или нескольких прямых линиях. Как правило, в строях находятся группы кораблей охранения и группы охраняемых кораб-лей, входящих в состав походных или боевых ордеров соединений корабле. По степени сложности построения строи различаются Простые строиПростым строем называется строй, в котором все корабли расположены на одной прямой линии (рис.1). Строй кильватера (кильватерная колонна). Строем кильватера называется такой строй, в котором угол строя равен 180° и корабли идут в одной кильватерной струе.Строй фронта. Строем фронта называется такой строй, при котором линия строя перпендикулярна курсу кораблей. Строй пеленга. Строем пеленга называется такой строй, в котором угол строя может быть любым, но не равным 0°, 90°, 180° Строй уступа. Строем уступа называется такой строй, в котором угол равнения равен 45° (частный случай строя пеленга). Сложные строи Сложным строем называется такой строй , в котором корабли расположены в несколько линий или на одной ломаной линии (рис.2). Строй клина . Строем клина называется такой строй, в котором корабли расположены на сторонах угла, в вершине которого находится корабль-уравнитель.Строй сложного кильватера.Строем сложного кильватера называется такой строй, в котором корабли следуют в нескольких кильватерных колоннах. трой сложного фронта. Строем сложного фронта называется такой строй, в котором корабли следуют в нескольких параллельных линиях, каждая из которых представляет собой строй фронта. |
Последнее изменение этой страницы: 2019-04-11; Просмотров: 799; Нарушение авторского права страницы

 Способом захождения называется такое изменение на
Способом захождения называется такое изменение на  правления строя (ордера) кораблей, при котором корабль начинает поворот с выходом на одну и ту же линию изменения курса. При выполнении поворота в строю линия поворота проводится через точку начала поворота крайнего внутреннего (по отношению к стороне поворота) корабля строя под углом 90° - α/2 к линии первоначального курса (рис.6). Через среднюю точку строя параллельно линии старого курса проводится линия, делящая корабли относительно стороны поворота на внешние и внутренние.
правления строя (ордера) кораблей, при котором корабль начинает поворот с выходом на одну и ту же линию изменения курса. При выполнении поворота в строю линия поворота проводится через точку начала поворота крайнего внутреннего (по отношению к стороне поворота) корабля строя под углом 90° - α/2 к линии первоначального курса (рис.6). Через среднюю точку строя параллельно линии старого курса проводится линия, делящая корабли относительно стороны поворота на внешние и внутренние. 
 Поворот способом кратчайших расстояний называется маневр для измене-ния курса строя, при котором корабли строя поворачивают «все вдруг» на рассчитанный для каждого корабля курс, которым выходят на линию ново-го строя, после чего ложатся на назначенный курс (рис.9).
Поворот способом кратчайших расстояний называется маневр для измене-ния курса строя, при котором корабли строя поворачивают «все вдруг» на рассчитанный для каждого корабля курс, которым выходят на линию ново-го строя, после чего ложатся на назначенный курс (рис.9).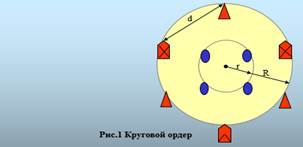 В зависимости от расположения относительно охраняемых кораблей охранение может быть круговым или в виде завесы, когда корабли охранения занимают место на части окружности в пределах сектора наиболее угрожаемого направления от атак противника. Для назначения мест кораблей в ордере их позиции устанавливаются относительно некоторой условной точки – центра ордера.
В зависимости от расположения относительно охраняемых кораблей охранение может быть круговым или в виде завесы, когда корабли охранения занимают место на части окружности в пределах сектора наиболее угрожаемого направления от атак противника. Для назначения мест кораблей в ордере их позиции устанавливаются относительно некоторой условной точки – центра ордера.



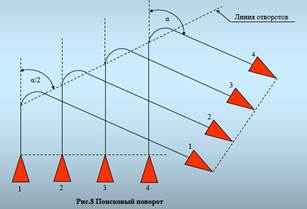
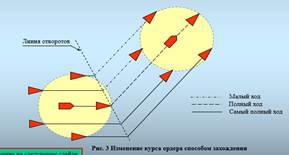

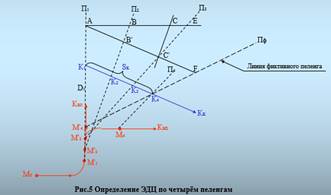

 Уравнитель ложится на кратчайший курс и уменьшает ход до малого, остальные корабли ложатся на рассчитанные курсы К2, К3, К4, К5 для выхода на линию нового курса, при этом корабли внешней стороны поворота, считая от середины строя (точка А), идут самым полным ходом, а корабли внутренней стороны поворота – средним ходом, средний корабль – полным ходом. От флангового корабля (уравнителя) внутренней стороны поворота проводится линия поворотов под углом α, равным величине угла отворота на новый курс. С выходом на линию отворотов каждый корабль самостоятельно ложится на новый курс, а с занятием своего места в строю дает малый ход. После того, как все корабли займут свои места встрою на новом курсе, по сигналу флагмана ход увеличивается до назначенного.
Уравнитель ложится на кратчайший курс и уменьшает ход до малого, остальные корабли ложатся на рассчитанные курсы К2, К3, К4, К5 для выхода на линию нового курса, при этом корабли внешней стороны поворота, считая от середины строя (точка А), идут самым полным ходом, а корабли внутренней стороны поворота – средним ходом, средний корабль – полным ходом. От флангового корабля (уравнителя) внутренней стороны поворота проводится линия поворотов под углом α, равным величине угла отворота на новый курс. С выходом на линию отворотов каждый корабль самостоятельно ложится на новый курс, а с занятием своего места в строю дает малый ход. После того, как все корабли займут свои места встрою на новом курсе, по сигналу флагмана ход увеличивается до назначенного.