|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Матрица простейших четырехполюсников.
Функциональное моделирование Одним из важнейших вопросов, который приходится решать при проектирование сложных РЭУ, является исследование процесса преобразования сигнала по мере его прохождения от входа к выходу РЭУ.
Это исследование можно проводить на ЭВМ с разной степенью точности – либо весьма точно, что требует больших затрат машинного времени, либо достаточно приближенно, но быстро. В первом случае РЭУ моделируется на основе физического подхода методами схемотехнического (электрофизического) моделирования, а во втором – на основе информационного подхода, методом функционального (электроинформационного) моделирования.
Суть функционального моделирования (ФМ) состоит в разбиении РЭУ по отдельным функциональным блокам (рис 5.1), каждый из которых выполняет то или иное функциональное преобразование сигнала (усиление, ограничение, интегрирование и т.д.); и расчете формы сигнала и его основных параметров в каждой точке полученной функциональной схемы.
Рис 5.1. Представление устройства для функционального моделирования
Под формой сигнала понимается либо зависимость сигнала от времени х(t), при моделировании во временной области, либо эквивалентное представление сигнала в виде изображения по лапласу x(p) или зависимости от комплексной частоты jω при моделировании в частотной области.
Основным требованием при ФМ является высокая скорость моделирования, необходимая для того, что бы за короткое время можно было исследовать большое число различных вариантов функциональных схем. Поскольку этап проектирования функциональной схемы относится начальным этапам общего процесса проектирования, то высокой точности от ФМ не требуется.
Первым основным допущением, характерным для ФМ, является развязка отдельных блоков функциональной схемы, т.е. независимость характеристик отдельных блоков от режима работы других блоков. Условие развязки блоков эквивалентно условию Вторым основным допущением, характерным для ФМ является допущение об однонаправленности элементов, т.е. сигнал на входе любого элемента не влияет на сигнал на его выходе. Это позволяет считать, что сигнал в функциональных схемах распространяется однонапрвленно – от входа к выходу каждого элемента. Заметим, что при составлении функциональных схем нельзя допускать объединения (замыкания) выходов различных элементов, например элементов 3 и 4 на рис. 5.1., поскольку это приведет к неопределенности выходного сигнала.
Характерным примером задач, решаемых методом ФМ, является исследование поведения системы автоматического регулирования, функциональные схемы которых состоят из типовых звеньев – дифференцирующих, интегрирующих, форсирующих и других звеньев.
В ряде случаев к ФМ прибегают потому, что исследуемые процессы весьма сложными их моделирование, например на основе теории цепей , требует слишком много времени даже при небольшом числе уравнений. Характерным примером может служить исследование процессов в радиочастотных устройствах (Рис. 5.2.)
Рис.5.2. Результат моделирования радиочастотного процесса На несущей частоте (точки 1,2,3…) и огибающей (точки 4,10,16…)
Если проводить расчет высокочастотного модулированного колебания (1,2,3…) на уровне электрических цепей для которого необходимо получить численное решение уравнений схемы в каждой временной точки
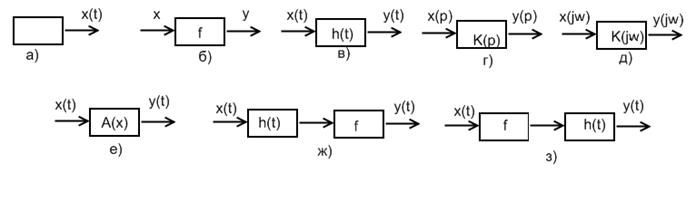
Базовые элементы функциональных схем Функциональные элементы можно свести к следующим четырем основным типам, которые называются базовыми: 1) Генераторы сигналов; 2)безинерционные элементы; 3)Инерционные линейные элементы 4) Инерционные нелинейные элементы
Рис 5.3. Базовые элементы функциональных схем: а - генератор сигнала; б - безинерционный элемент: в,г,д – линейные инерционные элементы; ж,з – эквивалентные представления нелинейных инерционного элемента
Основной характеристикой элемента при ФМ является его функция преобразования, связывающая входной и выходной сигнал.
Генератор сигналов. Этот тип элементов включает 2 разновидности – независимые генераторы, задающие сигнал x(t) на входе функциональной схемы, и управляемые генераторы, формирующие ту или иную форму сигнала x(t) в зависимости от управляющего воздействия U. Функция преобразования управляемого генератора имеет вид (5.1).
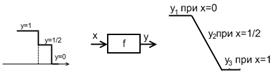
Безинерционный линейный или нелинейный элемент. Функция преобразования этого элемента представляет собой линейную или нелинейную функцию f, связывающую входной сигнал x и выходной сигнал y.
Безинерционный нелинейный элемент позволяет на основе (5.2) преобразовать форму входного сигнала x ( t ) в любую форму выходного сигнала
Разнообразие типов безынерционных элементов определяет широту их применения. Чаще всего их используют для построения статических временных диаграмм устройств(без чета их динамических свойств, т.е. инерционности) с целью проверки правильности функционирования при изменении параметров сигнала в заданном диапазоне.
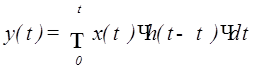
Инерционный линейный элемент Его функция преобразования во временной области – это переходная характеристика h(t), а в частотной область – коэффициент передачи К(р). В первом случае
Во втором
К инерционным линейным элементам относится весьма широкий класс устройств, например различные типы частотных фильтров, линейных усилителей, операционные усилители, выполняющие функции суммирования, интегрирования, дифференцирования и другие линейные операции и т.д.
Лекция №7 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-04-19; Просмотров: 240; Нарушение авторского права страницы


 для каждого блока. Вследствие этого преобразование сигнала зависит только от характеристик вход-выход каждого блока, а не от их взаимного влияния друг на друга.
для каждого блока. Вследствие этого преобразование сигнала зависит только от характеристик вход-выход каждого блока, а не от их взаимного влияния друг на друга.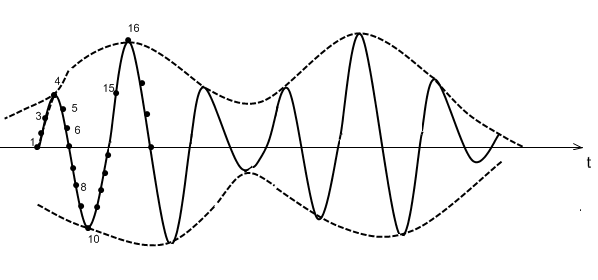
 , то моделирование потребует огромного количества времени.
, то моделирование потребует огромного количества времени.

 Важным частным случаем является безинерционный элемент с памятью, например триггер. Его функция преобразования неоднозначна к входному сигналу x и зависит не только от x , но и от состояния элемента
Важным частным случаем является безинерционный элемент с памятью, например триггер. Его функция преобразования неоднозначна к входному сигналу x и зависит не только от x , но и от состояния элемента , например ограничивать амплитуду x ( t ), формировать из импульса x ( t ) импульс другой формы y ( t ). Основные типы безынерционных элементов приведены в таблице 5.1
, например ограничивать амплитуду x ( t ), формировать из импульса x ( t ) импульс другой формы y ( t ). Основные типы безынерционных элементов приведены в таблице 5.1


 - Широтно-импульсная модуляция
- Широтно-импульсная модуляция





 -значения логической переменной
-значения логической переменной  - форма сигнала у
- форма сигнала у


 L – логическая функция
L – логическая функция