|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Глава I. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ РЛС ОСВЕЩЕНИЯСтр 1 из 17Следующая ⇒
Введение Корабельная двухкоординатная радиолокационная (PЛС) станция обнаружения надводных целей "MР-212" в системе сбора и обработки радиолокационной информации на корабле является основным средством освещения надводной обстановки в ближней зоне. Станция устанавливается на надводных кораблях различных классов. Основными устройствами РЛС является: -приемопередающее и индикаторное устройство; -антенное устройство; -система электропитания станции. В передатчике формируются одиночные импульсы электромагнитной энергии в диапазоне СВЧ, которые по волноводному тракту передаются в антенну и излучаются в пространство. Отраженные сигналы, улавливаются антенной и поступают в радиолокационный приемник где происходит преобразование, усиление и формирование сигналов до величин необходимых для нормальной работы индикаторного устройства. В индикаторе усиленные сигналы преобразуются в световое изображение на экране ЭЛТ, которое является первичной радиолокационной информацией о ближней надводной обстановке. Материал текста лекции разбит на отдельные главы, небольшие по объему, параграфы, в каждом из которых логически изложено законченное понятие о назначении, составе и принципе работы устройств станции. Структура изложения материала базируется на метода описания работы устройств станции по канальным схемам. Работа индикаторного устройства освещается на уровне функциональной схемы. Приводимые в тексте лекций позиционные обозначения элементов схем относятся к схеме канала, описываемого в данном параграфе. Система электропитания станции включает в основном следующие виды нагрузок: анодно-сеточные и накальные цепи; цепь высокого напряжения ЭЛТ и магнетронного генератора; цепь подогрева станции; цепь двигателя вращения антенны. В качестве источника первичного напряжения применяется электро-машинный преобразователь типа АТО-8-400,преобразующий переменное напряжение 220В или З80В, частотой 50Гц в однофазное напряжение 230В, частотой 400Гц. Питание станции выпрямленными напряжениями построено по принципу максимальной автономности приборов. Глава I. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ РЛС ОСВЕЩЕНИЯ БЛИЖНЕЙ НАДВОДНОЙ ОБСТАНОВКИ “МР-212” Технические параметры станции. К основным техническим параметрам станции относятся: 1. Несущая частота колебаний или длина волны FH - 9400 - 9460 МГц , l = 3,2 см, 2. Частота следования импульсов (частота повторения) FП = 3400 Гц, при Т = 0,1 мкс; FП = 1700 Гц, при Т = 0,25 мкс; FП = 850 Гц, при Т = 1,0 мкс. 3. Мощность передатчика Ри = 60 - 75 кВт. 4. Импульсная чувствительность приемника Рпр = не менее 121 дБ, при Т = 0,1 мкс; Рпр = не менее 124 дБ, при Т = 0,25мкс и 1,0 мкс. 5. Полоса пропускания приемника Fпр = 13 - 17 МГц, при Т = 0,1 мкс; Fпр = 5 - 7 МГц, при Т = 0,25 и 1,0 мкс. 6. Длительность зондирующих импульсов Т = 0,1 мкс, на Дшк = 1 и 2 мили; Т = 0,25 мкс, на Дшк =4 и 8 мили; Т = 1,0 мкс, на Дшк =16;32;64 мили. 7. Промежуточная частота приемника Fпч = 60 ± 1,0 Гц, при Т = 0,25 и 1,0 мкс; Рпц= 60 ± 1,5 МГц, при Т = 0,1 мкс. 8. Коэффициент шума приемного устройства не хуже 13 дБ. 9. Ширина диаграммы направленности антенны на уровне 0,5 мощности. Дв = 20±2°; Дг = 1,1 ± 0,1°. Уровень боковых лепестков диаграммы направленности в горизонтальной плоскости не хуже 25 дБ. Коэффициент стоячей волны по напряжению: - волноводного тракта - 1,4; - антенны -1,4. 10.Станция рассчитана на работу при питании от бортовой сети 220 ± 11В или 380 ± 19В и частотой 50 ± 1,5 Гц. Передающее устройство Канал формирования зондирующего импульса станции - предназначен для генерирования периодической последовательности высокочастотных импульсов электромагнитной энергии в диапазоне СВЧ. В состав канала (рис. 3.2) входит радиопередающее устройство, блоки и узлы которого П-6, П-7, генератор СВЧ -МГ т. МИ-189-Б2, емкостный накопитель С4 размещены в приборе "П" и элементы блока П-2 (ВЧ часть), обеспечивающие работу передающего и приемного устройства на общий антенно-волноводный тракт и согласование выхода магнетрона с нагрузкой. Формирование зондирующего импульса пo длительности, мощности и несущей частоте осуществляется магнетронным генератором. Модулятор передатчика выполнен по схеме "жесткого" модулятора с частичным разрядом накопителя. В качестве коммутирующего устройства применяется электронная лампа ГМИ - 7. Передающее устройство построено по однокаскадной схеме с частичным разрядом накопителя. Модулирующее устройство - включает в себя подмодулятор (бл. П – 6) и модулятор (бл. П – 7). Элементы автоматики и блокировки (реле Р4, Р5 прибора П) обеспечивают безопасность при работе.
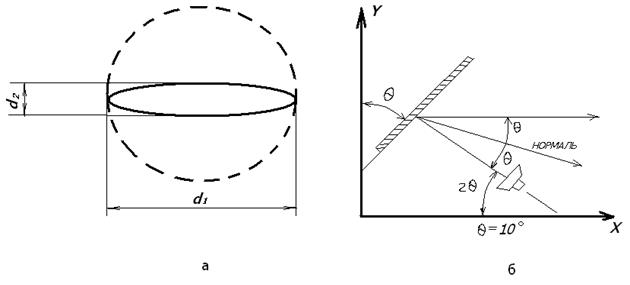
Приемное устройство Канал приема и обработки отраженных радиолокационных сигналов предназначен для приема, преобразования, усиления и формирования сигналов, отраженных от целей и принятых антенной до величин необходимых для нормальной работы индикаторных устройств. Функционально приемное устройство станции построено по супергетеродинной схеме с однократным преобразованием частоты. В состав канала входит; - блок П-2 - высокочастотная часть; - блок П-3 - УПЧ - усилитель промежуточной частоты; - блок П-4 - АПЧ-К – автоматическая подстройка частоты; - блок П-5 - видеоусилитель и схема АВРУ; - блок ВС-9 - видеоусилитель; - блок СВС - смеситель видеосигнала; - блок ВС-8 - сопряжение по видеосигналу. Конструктивно приемное устройство выполнено в виде отдельных блоков, узлов, размеченных в приборах П, ВС, И, УК. Индикаторное устройство. Канал индикации радиолокационного изображения предназначен для воспроизведения на экране ЭЛT первичной радиолокационной информации о ближней надводной обстановке, определение координат надводных целей и решения навигационных и тактических задач маневрирования. В состав станции входят два типа индикаторов; - приборы И, И1 – И4 - индикаторы кругового обзора панорамного типа; индикация радиолокационной информации осуществляется с помощью электронной развертки, вращающейся синхронно и синфазно с антенной в полярной системе координат; - прибор ИП - индикатор-планшет предназначен для сопряжения с изделиями 8, 10, 14, 19, решения различных задач тактического маневрирования. В индикаторах применяется ЭЛТ типа 45ЛМ5В с длительным послесвечением, с неподвижной отклоняющейся катушкой. Прибор И является основным индикатором, который совместно с прибором УК осуществляет управление работой станции. Приборы И1-И4 работают автономно, независимо от режима - работы прибора И. Все индикаторы работают в режиме внешней синхронизации (индикатор работает в качестве ведомого) от прибора ВС. Прибор УП - предназначен для управления приводами антенн и электромашинным усилителем, их защиты и контроля динамической ошибки силовой следящей системы, а также для обеспечения работы станции с одной антенной при выходе из строя одной из антенн или электромашинного усилителя. Прибор УП обеспечивает: - включение приводных двигателей антенн и ЭМУ в определенной последовательности; - защиту приводных двигателей и ЭМУ по цепям питания от перегрузки по току, обрыва фазы и неправильного чередования фаз; - контроль исправности следящей системы; - выдачу сигналов в прибор УК о включении приводных двигателей; - работу станции на одну антенну при выходе из строя одной из антенн или ЭМУ. Прибор УС – (угловой синхронизатор) предназначен для размножения данных курсового угла антенны и импульсов пути, выработки данных пеленга антенны, сигналов отметки курса и синхронизации, преобразования данных пути корабля и последовательности импульсов ретрансляции вышеперечисленных величин и курса своего в приборы станции и сопрягаемые изделия. Прибор АП (антенный переключатель) - предназначен для поочередного переключения высокочастотного сигнала от приемопередатчиков сопрягаемых изделий управляющих импульсов от сопрягаемых изделий 1 на приборах А1 или А2 в определенных секторах обзора. Антенны сопрягаемых изделий 1(15) конструктивно расположены в приборах А1, А2. Прибор УК (управление и контроль) - предназначен для управления и контроля станции. Прибор УК обеспечивает: - переключение передатчиков П1, П2; - включение и световую индикацию режима подготовки станции к работе; - включение РПЧ или АПЧ; - включение ВРУ на ручное или автоматическое управление; - переключение режимов работы прибора ВЧК на антенну A1 или А2; - включение и световую индикацию включения приводов антенн; - переключение режимов работы станции с антенны на эквивалент; - регулировку РПЧ и ВРУ. Внутри прибора УК установлены: выпрямитель B-27-5-I и выпрямитель постоянного напряжения "плюс" 300В состоящий из Тр-1 и диодов Д1-Д4, предназначенный для питания газовых разрядных датчиков блоков ИИМ. Волноводного устройства. Пространственный обзор представляет собой поэлементный просмотр морской поверхности в зоне действия корабельной РЛС надводного обнаружения. Чтобы определить направление на объект, необходимо все пространство, окружающее корабль, разбить на элементарные телесные углы, в каждом из которых отдельно выявить наличие целей. Зная, при каком телесном угле воспринимаются отраженные сигналы, можно судить об угловых координатах целей, а по времени задержки сигнала - о дальности до этих целей. В станции реализован механический способ управления радиолучом при пространственном обзоре. Поворот радиолуча обеспечивается поворотом антенны в горизонтальной плоскости, причем поворот радиолуча определяется поворотом оптической оси антенны. Направленный луч PЛС производит последовательный обзор в горизонтальной плоскости, причем ось луча перемещается по дуге сферы, центром которой является антенна станции, ведущая обзор. Параболическая антенна состоит из отражателя и облучателя. Отражателем антенны служит симметрично усеченный параболический рефлектор, размером d1 = 2300мм, d2 = 600мм с фокусным расстоянием 720мм. Облучатель - параболический рупор (рис. 2.1), Отражатель и рупор наклонены в вертикальной плоскости соответственно на 10° и 20° относительно вертикальной оси для частичного выноса облучателя из отраженного поля. Вынос рупора уменьшает уровень боковых лепестков ДН и улучшает согласование антенны с трактом.
Рис.2.1. Симметрично усеченный параболический рефлектор а – отражатель; б – взаимное расположение отражателя и облучателя
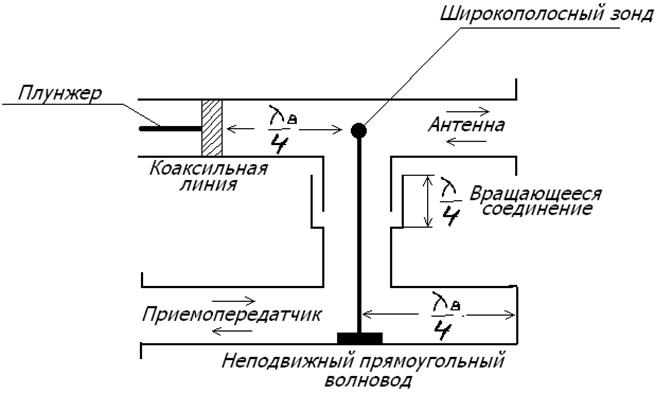
Блок ПВ - вращающийся переход предназначен для передачи ВЧ сигнала из неподвижного волноводного тракта во вращающуюся часть антенны. Блок представляет собой волноводно-коаксиальный переход и состоит из отрезка коаксиальной линии, соединенной с волноводами сечением 28,5х12,6мм. Для согласования волновых сопротивлений коаксиальной лини и волновода в месте их соединения установлены ступенчатые трансформаторы. Закорачивающая стенка волновода выполнена в виде перемещающегося плунжера, который после регулировки припаивается к волноводу (рис.2.2). Электрический контакт между вращающейся и неподвижной частями волноводной линии обеспечивается за счет четвертьволнового разомкнутого на конце отрезка, образованного внешним проводником коаксиальной линии, входное сопротивление такого отрезка линии равно нулю. Тем самым обеспечивается условие перехода энергии от приемопередатчика к антенне и обратно без заметного отражения от вращающегося перехода.
Рис.2.2. Блок ПВ
В неподвижной части внешний проводник коаксиальной линии впаян в широкую стенку прямоугольного волновода, а возбуждающий штырь коаксиала входит внутрь прямоугольного вращающегося волновода и возбуждает в ней волну H10. Ось возбуждающего штыря совпадает с осью вращения, что обеспечивает практически неизменные условия возбуждения волновода при вращении антенны, а шарообразный конец штыря обеспечивает требуемые параметры перехода в рабочем диапазоне частот магнетрона. Волноводная линия передачи - состоит из отрезков волноводных труб прямоугольного сечения размером 28,5х12,6мм, МЭК-81. Волноводная линия станции может иметь различный профиль в зависимости от размещения антенн и приемопередатчиков на корабле. В процессе монтажа линии встречается необходимость в поворотах линии, скручивании, защиты от вибрации. Для поворотов волноводной линии применяют волноводные уголковые секции с изгибом по узкой и широкой стенке (рис.2.3а). Для изменения плоскости поляризации применяют скрученные на 90° волноводные секции (рис. 2.3б)
Рис.2.3. Волноводные уголковые секции: а- с изгибом; б- скрученные
Жесткая волноводная линия, подвергающаяся вибрации, соединена с приемопередатчиком, в этом случае в качества переходного элемента применяют отрезок гибкого волновода. Высокочастотная энергия от передатчика станции по волноводной линии через прибор К и ВЧК поступает на вход прибора А1(А2), проходит через вращающийся переход и излучается параболической антенной в пространство в виде узконаправленного луча эллиптического сечения. Привод управления антеннами Привод, управления антеннами - предназначен для обеспечения синхронного и синфазного вращения антенн в горизонтальной плоскости и передачи данных об их угловом положении в прибор УС. При работе станции с двумя антенными постами в состав привода управления входят: -прибор A1 - ведущая антенна; -прибор А2 - ведомая антенна; -прибор УП - управления приводами антенн; -коммутационные элементы и элементы сигнализации, расположенные в приборе УК; -ЭМУ - электромашинный усилитель; -коммутационные элементы, следящая система и тахогенератор, расположенные в приборе УС Система приводов управления вращением антенны по курсовому углу (пеленгу) обеспечивает: - синхронное и синфазное вращение антенн; - включение и выключение в определенной последовательности ЭМУ, приводных и исполнительных двигателей; - защиту и сигнализацию, срабатывание защиты двигателей и ЭМУ от перегрузки или нарушения в цепях питания; - сигнализацию о превышении допустимой динамической ошибки; - работоспособность станции при выходе из строя одной из антенн или ее привода.
Принцип работы Система приводов антенн может работать в двух режимах: основном и аварийном. Основной режим предполагает работу станции с двумя антеннами при условии исправности всех элементов системы. Аварийный режим предполагает работу станции с одной антенной. Включение и выключение приводов антенн A1 и А2 производится с помощью тумблеров ПРИВОД АНТЕНН - ОТКЛ и ЭМУ - ОТКЛ, расположенных на приборе УК, при установлении переключателя ВКЛ. ПРИВОДОВ в приборе УП в положение А1, А2. Вращение антенны (прибор А2) осуществляется с помощью двигателя М2 типа АОМ 22-2тмб через силовой дифференциал. На одно солнечное колесо дифференциала подается вращение от двигателя М2, а на другое от двигателя силовой следящей системы М1. С валом антенны кинематически связаны датчик КУа ТрВ1 и приемник Трв2- контроля ошибки силовой следящей системы. Включение приводов антенн и ЭМУ производится в определенной последовательности: сначала для отработки рассогласования в положениях антенн включается ЭМУ, а через 10-15с включаются приводы антенн тумблером ПРИВОД АНТЕНН – ОТКЛ, который замыкает цепи питания контакторов P1, P2, P3 в приборе УП, коммутирующие цепи питания приводных двигателей М1, прибора A1 и М2 прибора А2 и приводной двигатель ЭМУ. При этом в приборе УП сначала срабатывает контактор Р3, включая питание на ЭМУ, затем контакторы Р1 и Р2, а на приборе УК загораются лампы ВКЛ. А1, ВКЛ. А2, ВКЛ. ЭМУ. При наличии рассогласования между угловыми положениями антенн приборов А1 и А2 на выходе ВТ – приемника (ВТП) Т13 в приборе УС появляется сигнал рассогласования, который усиливается усилителем УА и ЭМУ до величины, необходимой для управления исполнительным двигателем М1 в приборе А2, который через силовой дифференциал поворачивает антенну прибора А2 до согласованного положения с антенной A1. При вращении антенн КУа прибора A1 вводится в прибор УС с помощью маломощной следящей системы, состоящей из ВТ-датчика ТрВ2 прибора A1; ВТ-приемника, усилителя А3 и двигателя М1 прибора УС. С кинематической линией КУа в приборе УС связаны оси ВT-приемника силовой следящей системы (T13) и тахогенератора антенны. Ось ВТ-датчика ТрВ1 силовой следящей системы связана с валом антенны прибора А2. С валом двигателя М1 связан тахогенератор ТГ. Сигналы с тахогенератора ТГ прибора А2 поступают на вход блока коррекции (блок АВ-1) прибора УП, где вырабатывается суммарный сигнал, демпфирующий силовую систему. Этот сигнал подается на два входа предварительного усилителя параллельно с основным сигналом рассогласования усиливается по напряжению, проходит каскады преобразования в блоке УА прибора УП и в виде сигнала постоянного тока поступает для управления в ЭМУ. В приборах A1 и А2 расположены контрольные ВT (TpB1 в пp.A1 и ТрВ2 в пр.А2), в случае, когда динамическая ошибка превысит порог 03-04°, блок сигнализации (УП-1), подключенный к контрольным ВТ, выдает сигнал в прибор УК, на панели которого загорается лампа "НЕИСПРАВЕН СЛЕДЯЩИЙ ПРИВОД". При уменьшении ошибки лампа гаснет. При выходе из строя антенны А1 или ее привода переключатель на приборе УП устанавливается в положение А2. При этом снимается питание двигателя М1 в приборе A1, включается реле К1 и К2 прибора УС, которые отключают маломощную следящую систему КУА1 от ВТ-датчика (ТрВ2) прибора А1 и подключают к ВТ-датчику (ТрВ1) прибора А2. При работе станции с одной антенной, привод работает только в основном режиме. Для защиты приводных двигателей М1 и М2, привода ЭМУ при превышении нагрузки двигателей по току на 30% или обрыве одной из фаз в цепи питания предусмотрены блоки защиты (ЗД), размеченные в приборе УП. 2.4.Конструкция приборов A1 и А2 Конструкция приборов А1 и А2 выполнена в водозащищенном исполнении. Прибор состоит из двух основных частей: опорно-поворотного устройства, привода прибора (неподвижная часть) антенного устройства (подвижная часть). Привод прибора имеет литой корпус водозащищенной конструкции. Все элементы привода, за исключением основного вала с вращающимся переходом, размещены внутри корпуса и закрыты двумя боковыми крышками, через которые осуществляется доступ для осмотра и смены любого узла и элемента привода. На корпусе привода снаружи установлен приводной двигатель и кронштейн с контрольным рупором. Двигатель АОМ-22 помещен в кожух. В центральной части корпуса привода на двух радиальных подшипниках установлен полый вал с силовым косозубым зубчатым колесом, через которое от редуктора передается момент вращения на несущую конструкцию антенного устройства. Силовой редуктор выполнен в литом герметичном корпусе и заполнен маслом. Вращение от ротора двигателя передается на входной вал редуктора через упругую муфту. Внутри полого основного вала проходит высокочастотный вращающийся переход, в нижней пасти которого имеется волноводный выход для присоединения волноводной линии и высокочастотного разъема межприборного соединения. Высокочастотная часть антенны размещена на подвижном опорном кронштейне привода и состоит: а) из параболического рефлектора с тремя ребрами жесткости; б) из облучателя - параболического рупора, установленного в фокусе отражателя на литом кронштейне. Облучатель соединяется с вращающимся переходом-волноводом прямоугольного сечения 28,5х12,6 мм2. Волновод от центрального перехода проходит через центр привода и выводится наружу через сальник, расположенный в нижней части прибора. Принцип работы. Передающее устройство построено по однокаскадной схеме с частичным разрядом накопителя. Формирование зондирующего импульса по длительности, мощности и несущей частоте осуществляется магнетронным генератором типа МИ-189Б-2. Модулятор передатчика выполнен по схеме "жесткого" модулятора с частичным разрядом накопителя. Достоинствами такого модулятора являются: - возможность получения импульсов, изменение длительности которых не требует переключения высоковольтных цепей; - высокая стабильность начала и окончания импульсов; - получение формы импульсов, близкой к прямоугольной; - высокий КПД (40 – 70%). Недостатками являются: - необходимость иметь высоковольтный выпрямитель (до 25 кВ), что увеличивает габаритные размеры и массу модулятора; - значительные потери в электронных лампах, используемых в качестве усилителей и "ключей"; - необходимость дополнительного подмодулятора, который для запуска модулятора формирует импульсы амплитудой до 1200В при токе до 2А. Процесс формирования зондирующего импульса передатчика начинается с момента поступления синхроимпульсов запуска передатчика амплитудой 7В, длительностью t = 1 ± 0,5мкс на первый каскад подмодулятора блока П-6, который является усилителем запуска первого блокинг-генератора. Процесс формирования импульса подмодулятора происходит следующим образом. Анодной нагрузкой усилителя запуска - Л1а является ИТ-1,с обмотки 5-6 которого усиленный импульс амплитудой 35В положительной полярности через Лз-1 поступает на запуск первого блокинг-генератора. В исходном состоянии Л2 заперта напряжением смещения, снимаемым с делителей R18, R20 и R21, R22 от источника - 125В. При запуске схемы, когда на сетку левой половины лампы (Л2а) подается импульс положительной полярности, на аноде JI2 возникает усиленный импульс напряжения отрицательной полярности. Этот импульс, трансформируясь в обмотке (3-4) Тр-2, приобретает положительную полярность и подается на сетку правой половины Л2(Л2б). Правая половина лампы отпирается и срабатывает первый блокинг-генератор, создавая в выходной обмотке Тр-2(клеммы 5-6) прямоугольный импульс напряжения положительной полярности. Этот импульс напряжения через КП на Л1б поступает на сопрягаемую аппаратуру, а через линию задержки Лз-3, дифференцирующую цепь С15; R17, разделительный конденсатор С16-на управляющую сетку ЛЗ для запуска второго блокинг-генератора. Второй блокинг-генератор формирует импульсы различной длительности которые усиливаются мощным усилителем на Л4 типа ГМИ-6, формирующим выходные импульсы подмодулятора. Блокинг-генератор на Л3 работает в ждущем режиме. В исходном состоянии ЛЗ заперта отрицательным смещением -Ед снимаемым с делителей R18, R20 и R21, R22. С приходом пускового импульса ЛЗ открывается и в схеме возникает блокинг-процесс. Одновременно заряжается одна из однозвенных линий, которая состоит из последовательно соединенных индуктивностей (1-2) или (3-4) ТР-3 или ТР-4 и конденсаторов С11, C12, C13, C14. Длительность импульса, генерируемая вторым блокинг-генератором, определяется параметрами линии и может изменяться переключением линии с помощью реле P1, P2, P3 т. РЭС-9 и Р5 т. РЭС-22. При формировании импульсов с t = 0,1мкс срабатывает реле P1 и подключается конденсатор C12 и ТР-4. При формировании импульсов с t = 0,25 мкс реле обесточены, подключается С11 и ТР-4. При формировании импульсов с t = 1,0 мкс срабатывает реле Р2, РЗ и подключаются конденсаторы C13, C14 через нормально замкнутые контакты (4-6) реле Р5 и ТР-3 (рис.3.1). Анодное питание на ЛЗ подается через фильтр R10, C19 от источника +300 В на ТР-7. Диод ДЗ т. Д237Б устраняет паразитные колебания после формирования импульса. Сформированные импульсы второго блокинг-генератора с выходной обмотки (5-6) ТР-3 или ТР-4 подаются на управляющие сетки (2,6) усилителя импульсов на Л4, который вырабатывает импульсы для управления работой модуляторной лампы. Усилитель работает в ключевом режиме. В исходном состоянии, в интервале между импульсами запуска, лампа заперта отрицательным напряжением смещения от выпрямителя -125В, подаваемым на управляющие сетки лампы через делитель R24, R26, C21. При этом через резистор R33 и обмотку (1-2) ТР-5 происходит заряд конденсатора С23 от источника напряжения +2600 В. С приходом пускового импульса лампа открывается, происходит заряд конденсатора С2З по цепи: +С23 - анод-катод Л4 - Р32 - корпус - обмотка(1-2) ТР-5 - С23 . В процессе разряда конденсатора С23 на обмотке (5-6) ТР-5 формируется положительный импульс подмодулятора амплитудой порядка +1100В, который через С24 и Ш6 блока подмодулятора (П-6) подается на запуск модуляторной лампы. Длительность импульса определяется длительностью импульса второго блокинг-генератора.
Рис.3.1. Принципиальная схема коммутации элементов второго блокинг-генератора при формировании импульса длительностью 1,0 мкс
В исходном состоянии Л5 типа ГМИ - 7 заперта напряжением смещения «минус»800В, подаваемым на управляющую сетку с бл.П-6 от выпрямителя на Д8 т.Д1005А и ТР-8. На экранную сетку Л5 подается напряжение + 1600В от выпрямителя на Д11, Д12 т.Д1005А и Тр-9 бл.П-6 через Ш2 и резисторы R1, R2, R4, R5. К аноду лампы Л5 приложено напряжение 13 - 15 кВ накопительного конденсатора С4, который заряжается от источника высокого постоянного напряжения +Еа через R12, R7, R8, R4. Напряжение на конденсаторе С4 увеличивается по закону U0 = U2+ (U1-U2)[1- exp(t/C4(R12+R7,8*R4))] к концу заряда напряжение на С4 определяется выражением U1 = U2+ (U1-U2)[1- exp(- Tи/(R2*C4))], при условии, что Ти - t =Ти. При подаче на управляющую сетку лампы Л5 от подмодулятора импульса, напряжения положительной полярности амплитудой порядка 1100В лампа отпирается и конденсатор С4 начинает разряжаться через Л5 на нагрузку по цепи: +С4 – R5,6 – Л5 – R6,7(П-7) - R4, C2, 3 (цепь измерения тока МГ) - R7, R8 – (-C4). При этом за счет тока разряда конденсатора С4 на резисторах R7, R8 (типа 1ПЭВ–75-3.9 кОм±10%), включенных параллельно МГ, выделяется импульс отрицательной полярности с амплитудой U = 12-13 кВ. Под воздействием напряжения модулирующих импульсов, когда его величина по амплитуде достигает значения примерно 2/3 ЕАmax,возникает ток через МГ и происходит генерация СВЧ-колебаний. После окончания управляющего импульса на сетке модуляторной лампы Л5 последняя запирается и разряд накопительного конденсатора прекращается. За счет энергии, запасенной в паразитной емкости (С0 и С5), напряжение на МГ и ток через МГ прекратятся не сразу, а будут уменьшаться постепенно, формируя фронт спада импульса. Длительность импульсов, генерируемых магнетроном, будет определятся длительностью управляющих импульсов, поступающих от подмодулятора на управляющую сетку модуляторной лампы Л5 -ГМИ-7. В цепях Л5 установлены антипаразитные резисторы R3, R4, R5 (бл.П-7), служащие для подавления паразитной генерации и ограничения токов электродов при пробое лампы. Резисторы R8 – R10 стабилизируют режим работы экранной сетки при смене лампы и возможных колебаниях напряжения +1600В, устраняют последствия динатронного эффекта и термотока сетки. Конденсатор C1 является накопителем, отдающий энергию экранной сетки Л5 во время действия импульса. Питание передатчика. Питание станции выпрямленными напряжениями построено по принципу максимальной автономности приборов. В состав каждого прибора включены необходимые для данного прибора источники питания. В схему питания передатчика включены: -высоковольтный выпрямитель питания магнетрона; -четыре выпрямителя подмодулятора и цепи управления этими выпрямителями. Питание передатчика включается двумя ступенями. Первая ступень - включение приборов станции производится тумблером ПОДГОТОВКА на приборе УК. С помощью этого переключателя замыкается цепь управления (-27В) контактором K1 в приборе ВС. При срабатывании контактора через его главные контакты напряжение 400Гц, 220В от электромашинного преобразователя АТО-8-400 поступает на прибор УК и через него на приборы П1, П2, в прибор ВЧК - через прибор К. Напряжение 400 Гц, 220В подается на обмотки двигателя вентилятора охлаждения магнетрона и лампы ГМИ-7, на трансформатор накала МГ Tpl, на Тр8, Тр10 выпрямителей – 125B, – 800В и – 27В, а также выпрямителей накала 6,3В. Вторая ступень включения передатчика осуществляется автоматически спустя 3-4 мин, времени необходимого для прогрева и подготовки передатчика к работе. Для обеспечения выдержки времени служат реле Р2, Р8, и Р9 (реле времени), установленные в приборе УК. Работа схемы автоматической выдержки времени включения высокого напряжения заключается в следующем: -После срабатывания контактора напряжение 400 Гц, 220В поступает на выпрямитель В-27-5-1 (пp.УК), с выхода выпрямителя – 27В поступает через контакты (4-3) реле Р2 на обмотку реле Р8. -После трехминутной выдержки реле Р8 срабатывает и контактами (2-3) замыкает цепь питания реле Р9, которое через одну минуту срабатывает и контактами (2-3) замыкает цепь питания реле Р2. При этом Р2 становится на самоблокировку нормально разомкнутыми контактами (4-5), а нормально замкнутыми контактами (4-3) разрывает цепь питания реле Р8, Р9 после чего они обесточиваются. Одновременно реле Р2 контактами (4-5) замыкает цепь включения высокого напряжения (ВH). Схема оказывается подготовленной к включению высоковольтного выпрямителя блока П-8. -Напряжение – 27В через контакты (4-5) реле Р2 из прибора УК поступает на кнопку П3, расположенную в приборе И. При нажатии кнопки ПЗ напряжение – 27В проходит по цепи: прибор УК - прибор ВС, пр.И (ВC-9, П3) контакты (1-2), прибор К и через контакты (3-4) контакторов 74 и 63 волноводного переключателя (переключение приборов П) и контакты (9-7) реле P1 (включение чувствительности) поступает через прибор ВС на переключатель ВКЛЮЧЕНИЕ ПЕРЕДАТЧИКОВ П1-П2 прибора УК. В зависимости от положений переключателя напряжение поступает на приборы П1 или П2. -В приборе П напряжение – 27В через контакты 1 -3 блокировок В2, В3, контакты (7-8) реле Р4 защиты подмодулятора от перегрузки (бл.П-6), контакты (3-4) реле Р5 защиты от перегрузки модулятора, блок П-8 ВВ поступает на обмотку реле Р4 - включения ВН. При срабатывании реле Р4 (РЭН-33) через нормально разомкнутые контакты (1-2) подается напряжение 400 Гц, 220В, вторая очередь на ВВ блока П8, а через нормально разомкнутые контакты (4-5) и (10-11) подается напряжение второй очереди на подмодулятор, выпрямитель +2600В Тр6, выпрямитель +600В Тр7,выпрямитель +1600B Тр9. В станции предусмотрено переключение излучения с антенны на эквивалент в приборе К. Управление переключением производится тумблером АНТЕННА - ЭКВИВАЛЕНТ. В момент переключения автоматически отключается высокое напряжение в приборе П путем разрыва цепи – 27В нормально замкнутыми контактами (3-4) волноводного переключателя. Реле Р2 остается под током и цикл работы реле времени не повторяется. При включении тумблера КОНТРОЛЬ ЧУВСВИТЕЛЬНОСТИ, контакты (9-7) реле Р1 прибора К размыкаются и выключают высокое напряжение. Питание подмодулятора Источники питания подмодулятора конструктивно расположены в блоке П-6. Выпрямители – 800В (– 600В) и – 125В предназначены для питания цепей смещения Л5 (ГМИ-7), Л2, Л3 (6Н6П) и Л4 (ГМИ-6), а также для питания разрядника защиты приемника РР-8З блока П-2.Выпрямители выполнены по однополупериодной схеме на кремниевых диодах Д6, Д7 (Д237Б) и Д8 (Д1005А). Выпрямители питаются от ТР8 (клеммы 5,10). Источник – 800В поддерживает дежурный тлеющий разряд в разряднике защиты приемника Рр-83 и является источником смещения на сетке лампы модулятора Л5 (ГМИ-7). Выпрямители +300В и +600В предназначены для питания анодов ламп Л1-ЛЗ (+300В) и питания экранной сетки Л4 (+600В). Выпрямители выполнены по однополупериодной схеме на диодах Д10 (Д1005А) +300B и Д9 (Д1005А) +600В. Питание осуществляется от Тр7. Напряжение +300В через фильтры С30, Др1, С31 поступает для питания анодов Л1-ЛЗ. Напряжение +600В снимается с конденсатора С29. Выпрямители +2600В и +1600B предназначены для питания анодов Л4 (ГМИ-6) и экранной сетки Л5 (ГМИ -7). Выпрямители выполнены по схеме удвоения напряжения, в качестве вентилей применены кремниевые диоды Д4, Д5 (Д100В) +2600В, и Д11, Д12 (Д1005А) +1600В. Питание осуществляется от Тр6 и Тр9. Выпрямители +1600B и +2600В имеют защиту от перегрузок по выпрямленному току. Минусовые точки этих выпрямителей соединены с корпусом через обмотку реле Р4. Фильтры Р53, С35 и Р55, С37 служат для устранения срабатывания реле защиты от бросков тока при включении выпрямителей. Резистор R54 обеспечивает нормальную работу выпрямителей при обрыве обмотки реле Р4. При перегрузке выпрямителей реле срабатывает, контакты (7-8) размыкаются и разрывают цепь "ВЫСОКОЕ" – 27В, подаваемого на реле Р4 прибора П. При этом выключается напряжение ~220,400 Гц (вторая очередь), то есть выпрямители обесточиваются. С помощью замкнувшихся контактов (7-6) реле Р4 становится на самоблокировку. Питание магнетронного генератора. Высоковольтный выпрямитель блок П-8 (ВВ) предназначен для питания магнетрона. Выпрямитель выполнен по схеме удвоения с регулировкой выходного напряжения изменением напряжения на первичной обмотке трансформатора Tp1. Выпрямитель выдает регулируемое напряжение 10-15,5 кВ при токе нагрузки 25мА. В схему ВВ входит трансформатор питания Tp1 и последовательно включенный дроссель Др1 с обмоткой подмагничивания сердечника (5-6), для регулировки напряжения на выходе ВВ. В качестве вентилей применены кремниевые диоды Д5 - Д12, зарядные конденсаторы С10 и С11- Конденсаторы С2 — С9 служат для выравнивания обратных напряжений на диодах Д5 - Д12. Так как на разных шкалах дальности скважность импульсов разная, то нагрузка на выпрямитель резко меняется. Поэтому при регулировке необходимо устанавливать ток магнетрона отдельно для каждого из трех режимов работы (t = 0,1мкс; t = 0,25мкс; t = 1,0мкс). Для этого имеются три цепи постоянного тока в обмотке подмагничивания дросселя Др1, переключаемые при помощи реле Р6, Р7 и P11 (рис.3.2). Цепь постоянного тока обмотки подмагничивания (5-6) Др1 образована двухполупериодным выпрямителем, собранным по мостовой схеме, фильтрующим конденсатором С1, резисторами R18(t = 1мкс), R19, R16, R17 (t = 0,25 мкс) и R20, R21, R22(t = 0,1мкс) и обмоткой подмагничивания. Перераспределение напряжения 220В, 400Гц между обмотками Tp1 и Др1 происходит за счет изменения индуктивного сопротивления обмотки управления (3-4-2-1) дросселя.
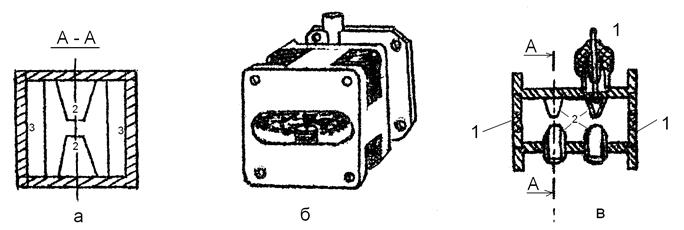
Рис.3.2. Схема электрическая принципиальная передающего устройства. При изменении тока подмагничивания дросселя изменяется магнитная проницаемость сердечника и индуктивное сопротивление обмотки управления. В результате этого меняется переменное напряжение, приложенное к первичной обмотке Tpl, определяющее напряжение на выходе высоковольтного выпрямителя. Регуляторы R18, R19, R20 обеспечивают регулировку выходного напряжения в пределах U = 15,5 кВ. Передача энергии от ВВ к магнетрону путем заряда и разряда накопительной емкости (С4) характеризуется тем, что средний ток заряда равен среднему току магнетрона. Это обстоятельство используется для контроля тока МГ. Поэтому шлицы регуляторов R18, R19, R20 на передней панели блока П-8 помечены надписями РЕГУЛИРОВКА ТОКА МАГЕНТРОНА (0,1; 0,25; 1,0 мкс). Цепь контроля тока магнетрона состоит из шунта R4, конденсаторов-филътров С2, С1 добавочного сопротивления R15 и стрелочного прибора ИП-1 блока П-1. Напряжение +16 кВ, пропорциональное току, передается через цепочку делителя R6-R10 блока П-8, переключатель В1, В3 “НАПРЯЖЕНИЯ” – на стрелочный прибор ИП1 блока П-1. Конструкция. Конструкция прибора П блочная. Отдельные элементы, узла и блоки прибора соединены электрическим монтажом и размещаются в гнуто-сварном каркасе, который устанавливается в бескаркасном штампованном корпусе, выполненном в виде шкафа брызгозащищенного исполнения. Каркас прибора П разделен на отсеки сварным вкладышем, обеспечивающим экранировку. Устройство защиты приемника Требуемая для защиты приемника изоляция от передатчика, должна составлять не менее 60-80 дБ, а суммарная энергия, просачивающаяся через защитное устройство, незначительна и не должна превышать 1 мВт. Ферритовый антенный переключатель (ФАП) и устройство защиты приемника (УЗП) объединены в одной конструкции. Структура построения ФАП обеспечивает развязку приемопередатчика до 40 дБ. Дополнительную развязку, до 80 дБ обеспечивает специальный широкополосный разрядник защиты приемника т. РР-83А конструктивно расположенный в плече - 1 ФАП. Разрядник представляет собой вакуумно-герметичную резонансную структуру, заполненную газом. При воздействии СВЧ электрического поля высокого уровня мощности внутри разрядника возникает СВЧ газовый разряд, в результате чего входное сопротивление разрядника становится очень малым,a вносимое им затухание для проходящего через него мощного сигнала резко возрастает. При действии СВЧ-поля низкого уровня мощности разряд отсутствует и разрядник ведет себя как CBЧ-фильтр (рис.4.3).
Рис.4.3. Резонансный газовый разрядник: а – сечение разрядника по А-А; б – внешний вид разрядника; в – продольное сечение разрядника; 1 – резонансные “окна”; 3 – индуктивная диафрагма; 2 – конусные электроды; 4 – электрод поджига;
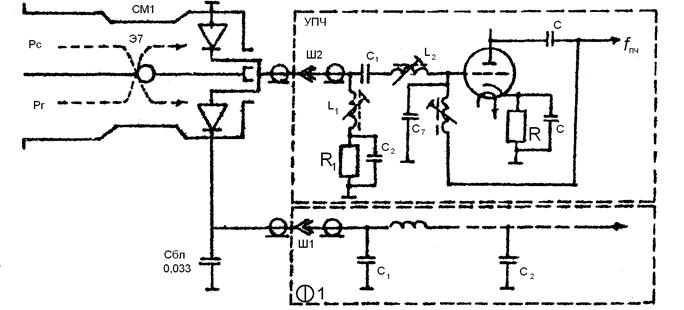
Для уменьшения порогового уровня мощности зажигания в РЗП используется вспомогательный тлеющий разряд, создаваемый электродом поджига, на который подается постоянное напряжение "минус" 600 В. Преобразователь частоты Преобразование частоты в радиолокационном приемнике производится с помощью кристаллических диодных смесителей, размещенных в специальных волноводных секциях, к которым подводится непрерывные колебания СВЧ от гетеродина (К-94) и отраженные сигналы из антенны СМl (или ослабленные сигналы СВЧ-магнетрона - в СМ2). Смесители УПЧ и АПЧ-К по конструкции выполнены по однотипной схеме и представляют собой балансные смесители с щелевым мостом, однотактным выходом, последовательным включением диодов по постоянному току и параллельным - по переменному (рис.4.4). Обеспечение балансности смесителей осуществлено с помощью щелевых мостов Э7 и Э8. Смесительные секции УПЧ-СМ1 и АПЧ-СМ2 представляют два короткозамкнутых с одной стороны волновода, в одном из которых установлен диод Д405Б, в другом - Д405БП. Выход СМ1 нагружается на входной контур УПЧ. Благодаря свойствам щелевого моста (равное деление входных мощностей между диодами с относительным фазовым сдвигом, равным 90°) и разнополярному включению диодов во входной цепи УПЧ, будет выделятся только полезный сигнал. Шумы гетеродина оказываются подавленными. Протекающий через диод ток при работе смесителя состоит из постоянной составляющей I0 и тока I~, разностной частоты fпч =fс±fг, выделяемой во входном контуре УПЧ. По току I0 осуществляется эффективный контроль режима работы смесителей СМ1 и СМ2.
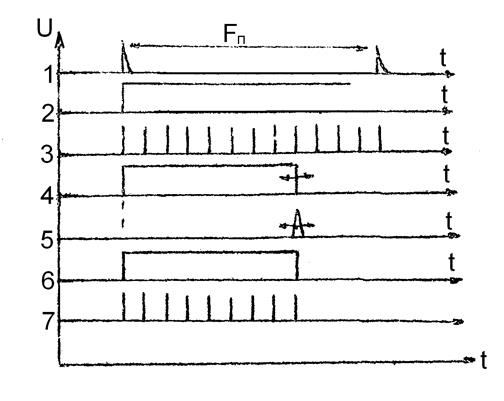
Рис.4.4 Схема балансного смесителя Видеоусилитель Под видеоусилителем понимается совокупность каскадов, включенных между УПЧ и индикатором РЛС. Предназначен для усиления видеоимпульсов по амплитуде и трансляции их в ИКО. Состав видеотракта: блоки П-5(T1¸T4), ВС-9(Т1¸Т5), СВC и катод ЭЛТ. Видеоусилитель в блоке П-5 на транзисторах Т1-Т4 пpедcтавляeт собой четырехкаскадный широкополосный усилитель с гальванической связью и эмиттерной коррекцией в области высоких частот. Пpoблему получения на экране ЭЛТ одновременного четкого изображения морской поверхности, береговой черты и заостренных площадей на фоне местности можно решить с помощью трехтоновой амплитудной характеристики видеотракта. Эта задача peшается на оконечном участке видеотракта в блоке СВC, который предназначен: - для формирования трехтоновой амплитудной характеристики видеоусилителя; - для усиления видеосигналов амплитудой 0,2-3В до уровней, необходимых для работы ЭЛТ: - для формирования импульсов подсвета и управления яркостью подсвета развертки отметки курса и визира. Для формирования трехтоновой амплитудной характеристики используется принцип разделения видеотракта на каналы высокого (Т13,T14) и низкого уровней (Мк 1НТ591Д). Сигналы каждого из каналов смешиваются), в общем смесителе (T17), при необходимости стробируются, ограничиваются, усиливаются и поступают на выходной каскад (T27,T28) и далее на катод ЭЛТ. Принцип работы Радиально-круговая развертка дальности на экране ЭЛT вызывается магнитным полем неподвижной отклоняющей системы с двумя обмотками, поля которых взаимно перпендикулярны. Пилообразная форма тока в обмотках отклоняющей системы получается за счет подключения их на время прямого хода луча к источнику напряжения, которое меняется по закону синуса или косинуса. С поступлением в блок ГР прямоугольных импульсов запуска развертки начинается процесс формирования пилообразного напряжения развертки трапецеидальной формы, которое поступает на роторы ВТ развертки в блоке КР и развертки визира направления на ВТ визира в датчике угла (ДУ). Блок КРВ осуществляет коммутацию роторных и статорных цепей фазорасщепителей развертки дальности и развертки визира направления. Соблюдается следующая цикличность создания разверток на ИКО: - 15 разверток дальности; - развертка электронного визира направления. Цикл из 32 импульсов в серии посылок синхронизирующих импульсов. Импульсы коммутации развертки дальности и визира обеспечивают прохождение через блок КРВ импульсов развертки на ВТ развертки (15 импульсов) либо на ВТ визира (один из 16 импульсов). Пилообразный импульс напряжения, поступая на ротор ВТ, индуцирует в его двух взаимно перпендикулярных статорных обмотках пилообразные импульсы напряжения, пропорциональными синусу и косинусу угла разворота ротора относительно статора. Статорные обмотки подключены к УПТ с мощными выходными усилителями тока, поэтому в двух взаимно перпендикулярных катушках отключения ОК-Х и ОК-У формируются пилообразные импульсы тока развертки. Амплитуда импульса тока развертки достаточна для отклонения луча на весь экран ЭЛТ. Импульсы коммутации развертки дальности и визира направления, поступая через смеситель видеосигналов CВC на катод ЭЛТ, используются в качестве импульсов подсвета при прямом ходе развертки. Трансформатор развертки (ВТ-развертки) вращается синхронно и синфазно с антенной за счет работы электромеханической следящей антенны в приборе УС и исполнительной части в приборе И. Принцип работы Импульсы синхронизации U1 с прибора ВС запускают формирователь импульсов переменной длительности - блок ПВД и через линию задержки подаются на блок ФУС, который вырабатывает напряжение U2, запускающee формирователь тактовых импульсов, выходные импульсы U3 которого, через разрешающие каскады ФУС подаются на счетчик дальности СД. Схема ПВД формирует импульсные сигналы, длительность которых соответствует по времени дальности до визируемой цели и изменяется регулятором ДАЛЬНОСТЬ. Далее импульс U4 ПВД поступает в схему ФИ, где происходит формирование импульса визира дальности по длительности U5 в зависимости от шкалы дальности. Импульсы ПВД поступают в схему СВС, откуда вместе с импульсами МД подаются на катод ЭЛТ. Селектор дальности схемы ФУС пропускает на счетчик дальности тактовые импульсы только в интервале измеряемой дальности, для чего в схеме ФУС вырабатывается напряжение U6, запрещающее пропуск тактовых импульсов в счетчик дальности за пределами шага квантования. Следовательно, в счетчике дальности записано количество импульсов U7, пропорциональное временному положению импульса ПВД, совмещенного с сигналом отметки цели на экране ЭЛТ. С выхода дешифратора СД снимаются сигналы высвечивания знаков индикаторов цифрового табло ЦТ-3, индуцирующих расстояние до цели в милях (рис. 5.2).
Рис.5.2. Эпюры формирования напряжения ПВД Канал визира направления Предназначен для определения углового положение визира направления на экране ИКО с точностью до 0,1° и индикацию его в градусах на ЦТ-4 "Градусы". Состав: ДУ - датчик угла; ФСДШ-1 - формирователь считывания и дешифрации (3 шт.); ФСДШ-2 - формирователи считывания и дешифрации; ЦТ-4 - цифровое табло "Градусы".
Принцип работы Направление электронного визира на экране ИКО задает вращающийся трансформатор визира, имеющий механическую связь с датчиком угла. Изменение направления электронного визира осуществляется разворотом роторов ВТ визира и ДУ через редуктор от двигателя М1. Сторона вращения визира на экране ИKO задается клавишами НАПРАВЛЕНИЕ, изменяющими направление вращения двигателя (предусмотрено две скорости вращения в обе стороны). Отсчет направления электронного визира выдается на ЦТ-4. Дискретность отсчета 0,1° в пределах от 0о до 360°. Цифровая индикация положения визира направления осуществляется следующим образом. Датчик угла (ДУ) представляет собой позиционный фотоэлектрический преобразователь углового положения вала ВТ визира направления в четырехразрядный десятичный код напряжения. Выходными сигналами датчика являются электрические сигналы выдаваемые фотодиодами на входы блоков ФСДШ-1, ФСДШ-2. Однозначность считывания угловой информации обеспечивается методом логического считывания сигналов с фотодиодов типа ФД-27К. Логическое считывание обеспечивает однозначное прохождение сигнала при одновременной засветке соседних фотодиодов. Конструктивно усилители сигналов фотодиодов, дешифраторы и схемы формирования однозначности считывания объединены в три блока ФСДШ-1, формирующие соответственно сигналы первого, второго и третьего разрядов и одного блока ФСДШ-2, формирующего сигналы четвертого разряда. Работа устройств основана на принципе усиления и преобразования фототока в напряжение. Выборки полученных напряжений посредством коммутации и последующей дешифрации преобразуются в код, необходимый для индикации семисегментного цифрового табло. Цифровое табло ЦТ 4 собрано на четырех семисегментных цифросинтезирующих полупроводниковых индикаторах типа 3ЛС 32Б1, каждый из которых подключен к соответствующему дешифратору. Цифровой метод снятия информации обеспечивает точность отсчета угла порядка 0,1о - 0,3°. Формирование пилообразного напряжения трапецеидальной формы развертки электроннoгo визира направления осуществляется каждым 16-ым импульсом в цикле из 32 импульсов в серии посылок синхронизирующих импульсов. Блоком КРВ осуществляется коммутация основной и визирной разверток, согласно установленному циклу через соответствующие ключи роторов ВТ. Импульсы тока статорных обмоток фазорасщепителя датчика угла поступают на вход УПТ. Через ОК-Х и ОК-У проходит импульс тока развертки визира, создающий светящую линию развертки визира направления на экране ИКО. Канал истинного движения При использовании РЛС на корабле на экране ИКО воспроизводится относительная окружающая обстановка, при которой все отметки от целей перемещаются по экрану индикатора. Причем скорость движения неподвижных целей пропорциональна скорости движения корабля, а отметки от подвижных целей перемещаются по экрану ИКО со скоростью, пропорциональной относительной скорости корабля и целей, что затрудняет оценку ситуации и усложняет решение задачи на расхождение со встречными целями. Индикатор истинного движения (ИИД) воспроизводит истинную навигационную обстановку, то есть на неподвижном радиолокационном изображении морской поверхности отражается истинное движение, как своего корабля, так и других целей. Для воспроизведения истинного движения необходимо из относительной скорости движения целей исключить вектор скорости своего корабля. Это достигается непрерывным перемещением центра (начала) радиально-круговой развертки в направлении и со скоростью движения своего корабля, для этого изображение на экране ориентируется относительно меридиана (ИС). Центр развертки дальности перед началом наблюдения смещается на 2/3 диаметра экрана в районе, обеспечивающий получение изображения в направлении движения своего корабля. Состав. Функционально в канал входят следующие устройства: ППС - преобразователь скорости судна; ПНЧ - преобразователи "напряжение-частота"; РВС - блок ручного ввода скорости; МС - блок масштабирования скорости; ИС - интегратор скорости; ВС - блок сброса; ПКН - преобразователь "код-напряжение"; УМ - усилитель мощности.
Принцип работы Первоначальная информация, на основании которой производится смещение центра изображения в режиме "Истинное движение" и последующее движение центра в направлении движения корабля, поступает от лага и гирокомпаса (с возможностью коррекции вводимых значений скорости и курса) или путем ручной установки скорости и курса своего корабля. Под воздействием импульсов скорости, поступающих от лага или через блок ПСС в блоке РВС, формируются импульсы строба скорости, с регулируемой длительностью от 45 до 115мкс в зависимости от значения коррекции скорости, установленной ручкой КОРРЕКЦИЯ СКОРОСТИ. Частота следования импульсов характеризует скорость корабля VК, а длительность каждого импульса зависит от введенной поправки скорости DVС на снос корабля. Последовательность импульсов строба скорости поступает на входы двух схем "И" устройства МС. Ввод данных курса корабля осуществляется синусно-косинусным потенциометрам (СКП), с которого снимается два постоянных напряжения, пропорциональных синусу и косинусу путевого угла. Эти напряжения поступают на преобразователи "напряжение-частота" (ПНЧ), которые вырабатывают кратковременные импульсы с частотой, пропорциональной поступающим напряжениям, и выдаются в МС. В результате операции логического перемножения на выходе схем "И"-'"НЕ" устройства МС получаются пачки импульсов, общее количество которых в единицу времени будет пропорционально составляющим пути по осям NS и EW с учетом вводимых данных коррекции скорости и курса (VX+DVX)sin(KК±DKK) и (VY+VY)cos(KK±DKK) Масштабирование частот следования полученных импульсов, в зависимости от Дшк, производится в МС с помощью делителя частоты с К = 2, что соответствует отношению масштабов шкал дальности (Дшк = 2, 4, 8миль). Импульсы из МС поступают на интеграторы скорости ИС, вырабатывающие в двоичном цифровом коде составляющие пути Sк и Sy. Преобразователи "код-напряжение" (ПКН), подключенные к выходам интеграторов, преобразуют двоичный код в постоянные напряжения с изменяющейся полярностью. Величина напряжений пропорциональна составляющим пройденного пути. Полярность определяется четвертями экрана относительно точки начального смещения центра развертки. Напряжения с блоков ПКН по ступают на двухканальный усилитель мощности (УМ), нагрузкой которого являются катушки смещения КС-Х и КС-У. Благодаря постоянным токам, протекающим в катушках, центр развертки смещается из центра экрана в некоторую точку, а при изменении токов перемещается в соответствии с движением своего корабля и масштабом выбранной шкалам дальности. С помощью двух оперативных ручек СМЕЩЕНИЕ ЦЕНТРА можно изменить исходное значение токов в обоих катушках смещения и, следовательно, устанавливать центр развертки в заданную точку экрана ИКО. Установку центра, развертки в центр экрана производят клавишей СБРОС В ЦЕНТР. Принцип работы По своей структуре построения канал является оконечным устройством видеоусилителя и представляет собой формирователь трехтоновой амплитудной характеристики, для формирования которой используется разделение сигнала на каналы высокого и фонового уровней. Сигналы каждого из каналов смешиваются в общем смесителе, при необходимости стробируются, ограничиваются, усиливаются и поступают на выходной каскад, управляемый импульсом подсвета, который предназначен для обеспечения необходимой яркости свечения ЭЛТ. Видеоимпульсы, поступающие на вход дифференциатора блока СВС подвергаются дифференцированию устройством ДЦ. Постоянная времени ДЦ изменяется под действием управляющего сигнала "Регул. МПВ", подаваемого с регулятора ДОЖДЬ, расположенного на панели управления индикатором. ЗАКЛЮЧЕНИЕ Эффективность боевого применения PЛC "MP-212" во многом определяется наличием развитого информационного обеспечения процесса изучения устройства материальной части станция и ее эксплуатации. Успех выполнения поставленной задачи во многом зависит от правильного функционирования устройств станции. Практика показывает, что тщательная настройка аппаратуры в сочетании с квалифицированной работой оператора значительно повышает эффективность боевого применения станции по назначению. Для повышения качества изучения материальной части станции данное пособие в некоторой степени решает эту задачу. В современных условиях радиолокация продолжает успешно развиваться. Разрабатывается и внедряется в практику конструирования новая элементная база. Совершенствуется система технического диагностирования, повышается надежность функционирования приборов системы встроенного контроля. Совершенствуются способы получения и анализа радиолокационной информации и ее отображение с использованием индикаторных приборов, основанных на различных физических принципах индикации.
СПИСОК ЛИТЕРАТУРЫ
Байрашевский А.М., Ничипоренко Н.Т. Судовые радиолокационные системы: Учебник для морских вузов.-2-е изд.-М.:Транопорт,1982. Широких И.П. Ремонт судовых радионавигационных приборов: Справочник-М: Транспорт,1985.-144 с. Судовые радиолокационные станции. Атлас/Под ред. А.М.Байрашевского -М. Транспорт,1986.-144 с. Судовые радионавигационные приборы: Учебник /В.В.Коновалов, Д.И.Кузнецов, Н.П.Мельников.-5-е изд.-М. Транспорт,1989. - 223 с. Техническое описания РЛС "МР-212", ЛА2.043.019 ТО.
Введение Корабельная двухкоординатная радиолокационная (PЛС) станция обнаружения надводных целей "MР-212" в системе сбора и обработки радиолокационной информации на корабле является основным средством освещения надводной обстановки в ближней зоне. Станция устанавливается на надводных кораблях различных классов. Основными устройствами РЛС является: -приемопередающее и индикаторное устройство; -антенное устройство; -система электропитания станции. В передатчике формируются одиночные импульсы электромагнитной энергии в диапазоне СВЧ, которые по волноводному тракту передаются в антенну и излучаются в пространство. Отраженные сигналы, улавливаются антенной и поступают в радиолокационный приемник где происходит преобразование, усиление и формирование сигналов до величин необходимых для нормальной работы индикаторного устройства. В индикаторе усиленные сигналы преобразуются в световое изображение на экране ЭЛТ, которое является первичной радиолокационной информацией о ближней надводной обстановке. Материал текста лекции разбит на отдельные главы, небольшие по объему, параграфы, в каждом из которых логически изложено законченное понятие о назначении, составе и принципе работы устройств станции. Структура изложения материала базируется на метода описания работы устройств станции по канальным схемам. Работа индикаторного устройства освещается на уровне функциональной схемы. Приводимые в тексте лекций позиционные обозначения элементов схем относятся к схеме канала, описываемого в данном параграфе. Система электропитания станции включает в основном следующие виды нагрузок: анодно-сеточные и накальные цепи; цепь высокого напряжения ЭЛТ и магнетронного генератора; цепь подогрева станции; цепь двигателя вращения антенны. В качестве источника первичного напряжения применяется электро-машинный преобразователь типа АТО-8-400,преобразующий переменное напряжение 220В или З80В, частотой 50Гц в однофазное напряжение 230В, частотой 400Гц. Питание станции выпрямленными напряжениями построено по принципу максимальной автономности приборов. Глава I. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ РЛС ОСВЕЩЕНИЯ БЛИЖНЕЙ НАДВОДНОЙ ОБСТАНОВКИ “МР-212” |
Последнее изменение этой страницы: 2019-05-08; Просмотров: 951; Нарушение авторского права страницы