|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Генераторы цифровых сигналов
Генераторы цифровых сигналов можно задать двумя способами. 1. Определение формы цифрового сигнала в задании на моделирование по формату (устройства STIM): Uxxx STIM(< количество сигналов>,<формат>) + <+узел источника питания> <-узел источника питания> + <список узлов>* <имя модели вход/выход> + [IO_LEVEL-< номер макромодели интерфейса вход/выход>] + [ STIMULUS =<имя воздействия>] [TIMESTEP=< шаг по времени>] + <команды описания формы сигнала>* Переменная <количество сигналов> определяет количество выходов генератора, равное количеству генерируемых разных цифровых сигналов. Переменная <формат> - это спецификация формата переменной <данные>, в которой представлены логические уровни сигналов генератора. Эта переменная представляет собой последовательность цифр, общее число которых равно значению переменной <количество сигналов>. Каждая цифра принимает значения 1, 3 или 4, что означает двоичную, восьмеричную и шестнадцатеричную систему счисления. Подключение источника питания задается номерами узлов <+ узел источника питания>, <-узел источника питания>. Номера подключения выходов генератора к схеме задаются <списком узлов>. Имя модели вход/выход задается параметром <имя модели вход/ выход>, как для любого цифрового устройства. STIMULUS - необязательный параметр, обозначающий имя сигнала; IO_LEVEL - необязательный параметр для выбора одной из четырех макромоделей интерфейса вход/выход (по умолчанию 0); TIMESTEP - не обязательный параметр для задания периода квантования (или шага). При задании моментов времени номером шага (имеют суффикс «С») он умножается на величину шага. По умолчанию устанавливается TIMESTEP=0. Этот параметр не принимается во внимание, если заданы абсолютные значения моментов времени (имеют суффикс «S»). Параметр <описание формы- сигнала> представляет собой произвольную комбинацию одной или нескольких следующих строк: <t>, <логический уровень> LABEL=<UMH метки> <t> GOTO <имя#етки> <п> TIMES <t> GOTO <имя метки> UNTIL GT <данные> <t> GOTO <имя метки> UNTIL GE <данные> <t> GOTO <имя метки> UNTIL LT <данные> <t> GOTO <имя метки> UNTIL LE <данные> <t> INCR BY <данные> <t> DECR BY <данные> REPEAT FOREVER REPEAT <n> TIMES ENDREPEAT FILЕ=<имя файла> Каждая цифра переменной <данные> представляет собой логический уровень соответствующего выходного сигнала, который представлен в системе счисления 2т, где т - соответствующая цифра переменной <формат>. Количество узлов в <списке узлов> должно быть равно значению переменной <количество сигналов>. Переменная <t> определяет моменты времени, в которые задаются логические уровни сигнала. Если перед значением переменной <t> имеется символ «+», то эта переменная задает приращение относительно предыдущего момента времени; в противном случае она определяет абсолютное значение относительно начала отсчета времени t = 0. Суффикс «S» указывает размерность времени в секундах (допускается суффикс «nS» - наносекунды и т.п.). Суффикс «С» означает измерение времени в количестве циклов, размер которых определяется параметром TIMESTEP (переменная <шаг по времени>). Переменная <данные> состоит из символов «0», «1», «X», «R», «F» или «Z», интерпретируемых в заданном формате. Переменная <п> задает количество повторяющихся циклов GOTO; значение п = -1 задает бесконечное повторение цикла. Переменная <имя метки> используется при организации цикла с помощью оператора перехода GOTO, который передает управление на строку, следующую за оператором LABEL=<имя метки>. REPEAT FOREVER - начало бесконечно повторяющегося цикла (эквивалентно конструкции REPEAT -1 TIMES). REPEAT <n> TIMES - повторение п раз. ENDREPEAT - - конец цикла REPEAT. FILE - указание имени файла, в котором находится описание одного или нескольких входных сигналов. Приведем пример: USIGNAL STIM(2,11) $G_DPWR $G_DGND 1 2 IO_STM TIMESTEP=1ns + ОС 00 ; В момент времени t=0 состояния обоих узлов равны «О» + LABEL=M + 1C 01 ; При t=1 не состояние узла 1 равно «0», узла 2 - «1» + 2С 11 ; При t=2 не состояние обоих узлов равны «1» + ЗС GOTO M 3 TIMES; В момент времени t=3 не переход на метку М и выполняется + первая инструкция без дополнительной задержки. Цикл повторяется 3 раза 2. Считывание временной диаграммы цифрового сигнала из файла (устройства FSTIM). Устройства FSTIM задаются по формату: Uxxx FSTIM(< количество выходов>) <+узел источника питания> + <-узел источника питания> <список узлов>* + <имя модели вход/выход> FIL Е=<имя файла сигналов> + [IO_LEVEL=<ножер макромодели интерфейса вход/выход>] + [SIGNАМЕS=<имя воздействия>] Параметр <количество выходов> определяет количество узлов, к которым подключаются сигналы. Остальные параметры имеют тот же смысл, что в п. 1. Обратим внимание, что задание с помощью параметра FILE имени файла, в котором описаны сигналы, обязательно. Файл цифрового сигнала может быть получен путем редактирования файла результатов моделирования или составлен вручную с помощью любого текстового редактора. Файл цифрового сигнала имеет две секции: заголовок (header), содержащий список имен сигналов; Приведем сначала пример файла цифровых сигналов: Заголовок: содержит имена сигналов CLOCK, RESET, IN1, IN2 ; имена 4-х сигналов *Начало описания сигналов; отделяется от заголовка пустой строкой 0 0000 ; двоичные коды сигналов 10ns 1100 20ns 0101 30ns 1110 40ns 0111 Заголовок имеет следующий формат: Переменная <имя метки> используется при организации цикла с помощью оператора перехода GOTO, который передает управление на строку, следующую за оператором LAEEL=<uмя метки>. REPEAT FOREVER - начало бесконечно повторяющегося цикла (эквивалентно конструкции REPEAT -1 TIMES). REPEAT <n> TIMES - повторение п раз. ENDREPEAT - конец цикла REPEAT. FILE - указание имени файла, в котором находится описание одного или нескольких входных сигналов. Приведем пример: USIGNAL STIM(2,11) $G_DPWR $G_DGND 1 2 IO_STM TIMESTEP=1ns + ОС 00 ; В момент времени t=0 состояния обоих узлов равны «О» + LABEL=M + 1C 01 ; При t=1 не состояние узла 1 равно «О», узла 2 - «1» + 2С 11 ; При t=2 не состояние обоих узлов равны «1» + ЗС GOTO M 3 TIMES; В момент времени t=3 не переход на метку М и выполняется + первая инструкция без дополнительной задержки. Цикл повторяется 3 раза 2. Считывание временной диаграммы цифрового сигнала из файла (устройства FSTIM). Устройства FSTIM задаются по формату: Uxxx FSTIM(< количество выходов>) <+узел источника питания> + <-узел источника питания> <список узлов>* + <имя модели вход/выход> FILЕ=<имя файла сигналов> + [IO_LEVEL=< номер макромодели интерфейса вход/выход>] + [ SIGN AMES =<имя воздействия>] Параметр <количество выходов> определяет количество узлов, к которым подключаются сигналы. Остальные параметры имеют тот же смысл, что в п. 1. Обратим внимание, что задание с помощью параметра FILE имени файла, в котором описаны сигналы, обязательно. Файл цифрового сигнала может быть получен путем редактирования файла результатов моделирования или составлен вручную с помощью любого текстового редактора. Файл цифрового сигнала имеет две секции: заголовок (header), содержащий список имен сигналов; Приведем сначала пример файла цифровых сигналов: Заголовок: .содержит имена сигналов CLOCK, RESET, IN1, IN2 ; имена 4-х сигналов *Начало описания сигналов; отделяется от заголовка пустой строкой 0 0000 ; двоичные коды сигналов 10ns 1100 20ns 0101 30ns 1110 40ns 0111 Заголовок имеет следующий формат: [ТIМЕSСАLЕ=<значение>] <имя сигнала 1>...<имя сигнала п>... ОСТ(<3-й бит сигнала>...<1-й бит сигнала>)... НЕХ(<4-й бит сигнала>...<1-й бит сигнала>}... Имена сигналов могут разделяться запятыми или пробелами. Они располагаются на одной или нескольких строках, но строки продолжения не имеют в начале знака «+». Максимальное количество сигналов 255, на одной строке могут размещаться не более 300 символов. Имена сигналов перечисляются в том же порядке, в котором их значения приводятся во временных диаграммах. Если перед именем сигнала не указывается название системы счисления, он считается двоичным. Имена сигналов, записанных в восьмеричном коде, предваряются кодом ОСТ и группируются по 3 сигнала (имена групп сигналов заключаются в круглые скобки). Имена шестнадцатеричных сигналов имеют код HEX и группируются по 4 сигнала. Приведем еще один пример файла сигналов: Clock Reset In1 In2 HEX(Addr7 Addr6 Addr5 Addr4) HEX(Addr3 Addr2 Addrl Addr0) ReadWrite 0 0000 00 0 ; для наглядности между группами можно включать пробелы 10п 1100 4Е 0 20п 0101 4Е 1 ЗОп 1110 4Е 1 40п 0111 FF 0 Здесь сначала приведены имена четырех двоичных сигналов, затем две группы сигналов, задаваемых в шестнадцатеричном виде, и затем еще один бинарный сигнал. В последующем списке значений сигналов даны 7 колонок, соответствующих приведенным в заголовке сигналам. Список значений имеет формат: <время> <значение сигнала>* Список значений отделяется от заголовка пустой строкой. Моменты времени и список значений сигналов должны быть разделены по крайней мере одним пробелом. Для моментов времени изменений сигналов указываются их абсолютные значения (в секундах), например 25ns, 1.2E-9, 5.8 или приращение относительно предыдущего момента времени. Признак приращения - знак «+» перед значением момента времени, например +5ns. Каждое значение сигнала соответствует одиночному бинарному сигналу или группе сигналов, имена которых помещены в группы с указателями системы счисления ОСТ или HEX. Общее количество значащих цифр в значениях сигналов должно быть равно общему количеству бинарных сигналов и групп сигналов, помеченных символами ОСТ и HEX. Разряды данных сигнала могут принимать значения, приведенные в табл. 4.29. Таблица 4.29. Значения сигналов
Заметим, что задний фронт не может в шестнадцатеричной системе обозначаться как F, потому что этот символ занят под численное значение. Приведем примеры генераторов цифровых сигналов типа FSTIM. 1. Пусть имеется файл digl .stm, в котором описана временная диаграмма сигнала IN1. Тогда в задание на моделирование можно включить следующее описание генератора: U1 FSTIM(1) $G_DPWR $G_DGND IN1 IO_STM virtual=DIG1.STM 2. Пусть имеется файл flipflop.stm следующего содержания: J К PRESET CLEAR CLOCK 0 0 0 010 10ns 0 0 111 В задание на моделирование включим описание генератора сигнала U2 FSTIM(4) $G_DPWR $G_DGND CLK PRE J К IO_STM + virtual=flipflop.stm SIGNAMES = CLOCK PRESET В этом примере первым двум узлам CLK и PRE соответствуют сигналы CLOCK и PRESET из файла сигналов, это соответствие устанавливается с помощью опции SIGNAMES. Последним узлам J и К соответствуют одноименные сигналы из файла сигналов, поэтому их имена нет необходимости включать в опцию SIGNAMES. Сигнал CLEAR в данном примере не используется (но на него можно сослаться в другом генераторе FSTIM). Цифровые компоненты Цифровые компоненты (примитивы) задаются по формату Uxxx <mun> [(<список параметров>*)] <+узел источника питания> + <-узел источника питания> <список узлов>* + <имя модели динамики> <имя модели вход/выход> + [MNTYMXDLY=<вы6op значения задержки>] + [IO_LEVEL=< уровень модели интерфейса>] Параметр <тип> указывает тип логического устройства (их перечень приведен ниже, например AND, NOR); в круглых скобках указываются значения одного или более параметров через запятую (например, для схемы И указывается количество входов). После списка узлов подключения логического устройства следуют имена двух, моделей. Первая модель описывает динамические свойства устройства, вторая - характеристики входных и выходных сопротивлений. Модели динамики имеют ключевые слова, приведенные в табл. 4.30. Таблица 4.30. Ключевые слова модели динамики
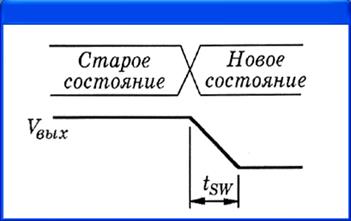
Модели вход/выход имеют ключевое слово UIO (п. 4.3.5). Параметр MNTYMXDLY позволяет конкретному индивидуальному устройству назначить минимальное, типичное или максимальное значение времени задержки, указанное в спецификации модели его динамики: 0 - значение задержки, заданное параметром DIGMNTYMX директивы .OPTIONS (по умолчанию параметр равен 2); 1 - минимальное значение; 2 - типичное значение; 3 - максимальное значение; 4 - расчет наихудшего случая (минимум/максимум). Параметр IO_LEVEL указывает тип цифроаналогового и аналого-цифрового интерфейса данного цифрового устройства: 0 - в соответствии со значением параметра DIGIOLVL директивы .OPTIONS (по умолчанию он равен 1); 1 - интерфейс AtoD1/DtoA1; 2 - интерфейс AtoD2/DtoA2; 3 - интерфейс AtoD3/DtoA3; 4 - интерфейс AtoD4/DtoA4. Запаздывание сигнала в примитивах цифровых устройств определяется в двух моделях: динамики и вход/выход. Модель динамики определяет задержки распространения и такие временные ограничения, как время установки (setup) и удерживания (hold). Модель вход/выход задает входные и выходные сопротивления, емкости и время переключения. Когда выход примитива соединяется с другим примитивом, общее время задержки распространения первого примитива равно сумме времени установления напряжения на его нагрузке и времени распространения сигнала, указанного в модели динамики. Время установления напряжения на нагрузке (loading delay) рассчитывается по формуле T нагр =0,69R вых С нагр где R вых - выходное сопротивление устройства, равное DRVH или DRVL в зависимости от логического уровня на выходе; С нагр - сумма входных и выходных емкостей цифровых устройств INLD, OUTLD, подключенных к данному выводу. Когда цифровой примитив подключен к аналоговому устройству, задержка распространения уменьшается на величину, равную времени переключения, заданного в модели вход/выход. Минимальная длительность сигнала на входе цифрового примитива, необходимая для изменения его логического состояния, должна превышать время задержки, приведенное в модели динамики (это ограничение не относится к цифровым линиям задержки). Более короткие входные импульсы не вызовут на выходе никакого эффекта. Пример. Приведем описание смешанной цепи на рис. 4.33, а: Analog/Digital Interface Example .ОРТ АССТ LIST LIBRARY EXPAND RELTOL=.001 .LIB DIG.LIB VSIN 1 OSIN(05v1MEG) U1 STIM(1,1) $G_DPWR $G_DGND 2 IO_STD + TIMESTEP = 10ns + (OC,1)LABEL=BEGIN + (10,0) (20,1) (3C.X) (40,0) (5C.Z) + 6C GOTO BEGIN -1 TIMES X1 1 23133LA3 RL 3 0 25k CL 3 0 5pF .TRAN 5ns 500ns .PRINT TRAN V(1) D(2) V(3) .PROBE .END Здесь имеется обращение к библиотечному файлу моделей цифровых отечественных компонентов dig.lib5. Обратим внимание, что цифровые ИС, даже простейшие, для которых имеются примитивы, представлены в библиотеке в виде макромоделей, имена которых совпадают с обозначением по ЕСКД (правда, в латинской транскрипции). Это позволяет пользователю не задумываться о правилах описания каждой конкретной ИС, предоставляя это разработчикам библиотек моделей. Информация об автоматически включаемых в схему макромоделях устройств сопряжения, их именах и именах новых цифровых узлов помещается в выходном файле с расширением*.OUT: **** Generated AtoD and DtoA Interfaces **** * Analog/Digital interface for node 1 * Moving X1.U1:IN1 from analog node 1 to new digital
+ node 1$AtoD X$1_AtoD1 1 1$AtoDAtoD Analog/Digital interface for node 3 Moving X1.111 :OUT1 from analog node 3 to new digital + node 3$DtoA X$3_DtoA1 3$DtoA 3 DtoA Analog/Digital interface power supply subckt X$DIGIFPWR 0 DIGIFPWR В качестве примера расчета переходных процессов приведем фрагмент выдачи данных в табличной форме по директиве .PRINT: TIME V(1) D(2) V(3) 0.000E+00O 0.000E+00 1 3.551 E+00 5.000E-09 1.570E-01 1 3.551 E+00 1.000E-08 3.139E-01 0 3.551 E+00 1.500E-08 4.704E-01 0 3.551 E+00 2.000E-08 6.264E-01 1 3.551 E+00 2.500E-08 7.820E-01 X 3.551 E+00 З.ОООЕ-08 9.369Е-01 X 3.551 E+00 .Перейдем теперь к описанию цифровых компонентов различных типов, сгруппировав их по следующим категориям: многоразрядные АЦП и ЦАП; Многоразрядные АЦП задаются по формату
+ [MNTYMXDLY=<вы6op значения задержки>] + [IO_LEVEL=< уровень модели интерфейса>] Имена узлов перечисляются в <списке узлов> в следующем порядке (рис. 4.26): <+узел источника питания>, <-узел источника питания>, <аналоговый вход>, <опорное напряжение>, <"земля">, <сигнал разрешений, <сигнал преобразований, <сигнал переполнения>, <т-и разряд >, ..., <1-й разряд> Смысл остальных параметров такой же, что и для интерфейса А/Ц типа Оххх. Модель динамики имеет формат .MODEL <имя модели> UADC [(параметры)] Рис. 4.26. Аналого-цифровой преобразователь Параметры этой модели приведены в табл. 4.31 (значения по умолчанию - 0, единица измерения - с). Таблица 4.31. Параметры модели динамики ЦАП
Временная диаграмма АЦП показана на рис. 4.27. Выходной сигнал АЦП равен ближайшему целому выражения (V(< аналоговый вход >,<" земля" >/V(< опорное напряжение >, <" земля" >)*2 m где т - количество Рис. 4.27. Переходные процессы в АЦП Сигнал разрешения (convert pulse) может иметь любую, в том числе и нулевую длительность. Если цикл кодирования t psd = 0, то т разрядов данных и разряд переполнения, не принимая неопределенного состояния, сразу принимают новое значение. Между узлами <опорное напряжение> и <"земля"> включается резистор с сопротивлением, равным 1/GMIN. Выборки входных напряжений производятся по переднему фронту импульса разрешения, причем скорость изменения входных напряжений не влияет на результат преобразования. Приведем пример описания 4-разрядного АЦП: U3 ADC(4) $G_DPWR G_DGND1 10 0 conv stat over out3 out2 outl outO DINAM IO_ADC .MODEL DINAM UADC( + tpcsmn=5ns, tpcsty=8ns, tpcsmx=10ns, + tpsdmn=16ns, tpsdty=20ns, tpsdmx=22ns, + tpdsmn=4ns, tpdsty=5ns, tpdsmx=6ns) .MODEL IO_ADQ UIO(drvh=50 drvl=50) Многоразрядный ЦАП задается по формату
+ [MNTYMXDLY=< выбор значения задержки>] + [IO_LEVEL=<ypoвень модели интерфейса>] Имена узлов перечисляются в <списке узлов> в следующем порядке (рис. 4.28): <+узел источника питания>, <-узел источника питания>, <аналоговый выход>, <опорное напряжение>, <" земля" >, <т-й разряд входного сигнала>, ..., <1-й разряд входного сигнала> Модель динамики ЦАП имеет вид .MODEL <имя модели> UDAC [(параметры)] Параметры этой модели приведены в табл. 4.32 (значения по умолчанию - 0, единица измерения - с). Рис. 4.28. Цифроаналоговый преобразователь Таблица 4.32. Параметры модели динамики АПЦ
Между узлами <аналоговый выход> и <"земля"> включается источник напряжения с нулевым внутренним сопротивлением, ЭДС которого равна: , ч бинарный входной сигнал (<опорное напряжение>, < земля >) х*(бинарный входной сигнал)/2 m Опорное напряжение определяет диапазон выходного аналогового напряжения. Между узлом источника опорного напряжения и «землей» включается сопротивление, равное 1/GMIN. Если какой-либо разряд входного цифрового сигнала не определен, выходное напряжение равно половине разности двух напряжений. Одно из них представляет собой выходное напряжение ЦАП, если все не определенные состояния «X» заменить на «1», второе - если эти состояния заменить на логический «О». При изменении состояний всех разрядов выходное напряжение линейно изменяется в течение интервала преобразования, как показано на рис. 4.29.
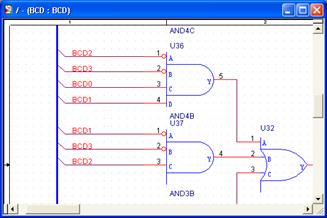
Рис. 4.29. Переходные процессы в ЦАП Рис. 4.30. Стандартные вентили и их сборки Вентили. Вентили подразделяются на элементарные и сложные. Элементарные вентили имеют один или несколько входов и только один выход. Сложные вентили (сборки) содержат в одном корпусе несколько простых вентилей (рис. 4.30). Кроме того, вентили подразделяются на два типа: стандартные вентили и вентили с тремя состояниями. Вентили с тремя состояниями управляются сигналами разрешения. Когда этот сигнал имеет уровень «0», выходной сигнал вентиля имеет неопределенный уровень «X» при высоком выходном сопротивлении Z. Все вентили описываются по формату, приведенному в начале разд. 4.3. Стандартные вентили перечислены в табл. 4.33. Таблица 4.33. Параметры моделей стандартных вентилей
Глава 6. |
Последнее изменение этой страницы: 2019-05-08; Просмотров: 172; Нарушение авторского права страницы
 Uxxx ADC(<m>) <список узлов> <модель динамики> + <модель вход / выход>
Uxxx ADC(<m>) <список узлов> <модель динамики> + <модель вход / выход> разрядов. Если это выражение больше 2 т -1, все разряды данных и разряд переполнения примут значение 1. Если оно меньше нуля, разряды данных примут нулевое значение, а разряд переполнения - 1. Таким образом, опорное напряжение устанавливает диапазон входного напряжения АЦП.
разрядов. Если это выражение больше 2 т -1, все разряды данных и разряд переполнения примут значение 1. Если оно меньше нуля, разряды данных примут нулевое значение, а разряд переполнения - 1. Таким образом, опорное напряжение устанавливает диапазон входного напряжения АЦП. Uxxx DAC(<m>) <список узлов> <модель динамики> + < модель вход/выход>
Uxxx DAC(<m>) <список узлов> <модель динамики> + < модель вход/выход>