|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Проектирование систем управления космических аппаратовСтр 1 из 2Следующая ⇒
Проектирование систем управления космических аппаратов по дисциплине “Системы управления ракет-носителей и космических аппаратов” Рекомендовано к изданию Редакционно-издательским советом университета в качестве учебно-методического пособия по курсовому проектированию для студентов специальности 24.05.06 «Системы управления летательными аппаратами» (Специализация №1 «Системы управления ракет-носителей и космических аппаратов»)
Москва Издательство Московского государственного университета леса 2015 УДК 685.515 Ф33
Разработано в соответствии с требованиями ФГОС ВПО с учётом рекомендаций ПрООП ВПО на основе программы дисциплины «Системы управления ЛА» Рецензенты: П.А. Тарасенко, к.т.н., профессор кафедры ИИС и ТП МГУЛ,
А.Ю. Кутоманов, ведущий инженер ФГУП ЦНИИмаш, отдел 3031
Работа подготовлена на кафедре «Системы автоматического управления»
Кудрявцев С.И. Ф33 Проектирование систем управления космических аппаратов: методическое пособие по курсовому проектированию. – М.: ФГБОУ ВПО МГУЛ, 2015. – 36 с.
Учебно-методическое пособие состоит из двух глав и содержит описание двух задач, связанных с проектированием систем управления космических аппаратов. В главе 1 описана задача определения параметров орбиты искусственного спутника Земли по измерениям с наземной станции слежения. В упрощённой постановке (плоский случай) приведена система дифференциальных уравнений движения центра масс ИСЗ, описаны модель измерений и соотношения дискретного фильтра Калмана, использующегося для обработки измерительной информации. Предложены варианты исходных данных для проведения расчётов по моделированию процесса оценивания текущей высоты полёта ИСЗ. Приведен пример выполнения расчёта и представления результатов. Глава 2 включает описание одной из основных задач, в обязательном порядке решаемой при баллистическом проектировании систем управления спуском – задачи оценки маневренных возможностей спускаемого аппарата. Приведена система дифференциальных уравнений движения центра масс СА, описаны модели действующих на СА сил. Предложены варианты исходных данных для проведения расчётов. Приведен пример выполнения расчёта и представления результатов.
УДК 685.515
© С.И. Кудрявцев, 2015 © ФГБОУ ВПО МГУЛ, 2015
Оглавление Глава 1. Синтез наблюдателя на базе дискретного алгоритма фильтрации Калмана
1.1. Введение. Цели выполнения работы………………………….... 4 1.2. Описание динамический системы и измерений……………….. 4 1.3. Уравнения движения ИСЗ………………………………………. 5 1.4. Начальные условия движения ИСЗ…………………………….. 5 1.5. Модель измерений………………………………………………. 6 1.6. Описание алгоритма обработки измерительной информации (дискретный фильтр Калмана)………………………………..... 6 1.7. Порядок выполнения работы…………………………………… 8 1.8. Содержание пояснительной записки…………………………… 9 1.9. Варианты исходных данных…………………………………… 10 1.10.Пример графического представления результатов моделирования…………………………………………………. 11
Глава 2. Проектирование системы управления спуском в атмосфере Земли пилотируемых КА 2.1. Введение. Цели выполнения работы………………………….. 15 2.2. Описание динамический системы………………….................... 16 2.3. Уравнения движения центра масс ЛА………………………… 16 2.4. Начальные условия движения ЛА…………………………….. 18 2.5. Расчёт плотности атмосферы Земли…………………………... 18 2.6. Порядок выполнения работы…………………………………… 20 2.7. Содержание пояснительной записки………………………….. 21 2.8.Варианты исходных данных…………………………………… 22 2.9. Пример оформления результатов выполнения работы…….... 23 Библиографический список к главам 1, 2 …………………………... 35
Глава 1. Синтез наблюдателя на базе дискретного алгоритма фильтрации Калмана
Введение. Цели выполнения работы. Студент в ходе выполнения задания по курсовому проектирования должен приобрести устойчивые навыки по моделированию и анализу динамики заданной динамический системы. Целями выполнения работы являются: - разработка программно-математического обеспечения для моделирования динамики орбитального движения искусственного спутника Земли (ИСЗ); - разработка программно-математического обеспечения для моделирования измерений наземной станции слежения; - разработка программно-математического обеспечения для моделирования работы дискретного алгоритма фильтра Калмана и получения оценки текущей высоты полёта ИСЗ по косвенным измерениям дальности и радиальной скорости; - проведение анализа полученных результатов и формулирование выводов.
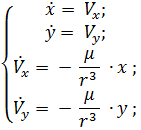
Уравнения движения ИСЗ Движение ИСЗ описывается системой дифференциальных уравнений вида (плоский случай, гравитационное поле Земли центральное, Земля не вращается) [2, 4]:
где: x, y - координаты центра масс ИСЗ; Vx, Vy – компоненты вектора скорости центра масс ИСЗ; μ = 398600 км3/сек2 – гравитационная постоянная Земли; h = r – R З – текущая высота полёта ИСЗ; R З = 6371 км - радиус Земли.
Рис. 1.1а. Система координат
Модель измерений
где:
см. варианты).
Порядок выполнения работы
1. Разрабатывается программно-математическое обеспечение для: - интегрирования дифференциальных уравнений модели динамической системы по заданным начальным условиям (шаг интегрирования принять равным шагу измерений) [3]; - моделирования измерений (с использованием датчика нормально распределённых случайных чисел); - вычисления оценки текущей высоты полёта ИСЗ с использованием на каждом шаге измерений алгоритма динамической фильтрации Калмана. 2. Проводится моделирование процесса оценивания текущей высоты полёта ИСЗ на интервале времени 10÷ 15 минут с использованием исходных данных заданного варианта. В случае неустойчивости (расходимости) фильтра подбирается постоянная матрица Q в виде:
где скорости ИСЗ на одном шаге измерений;
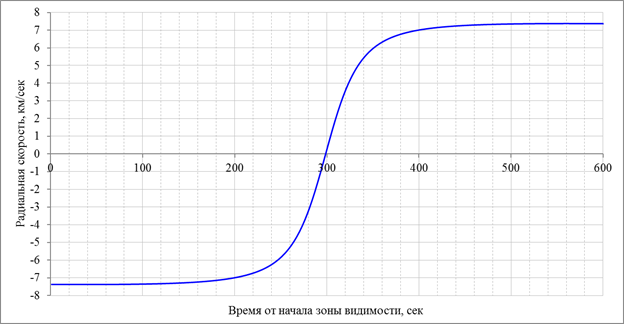
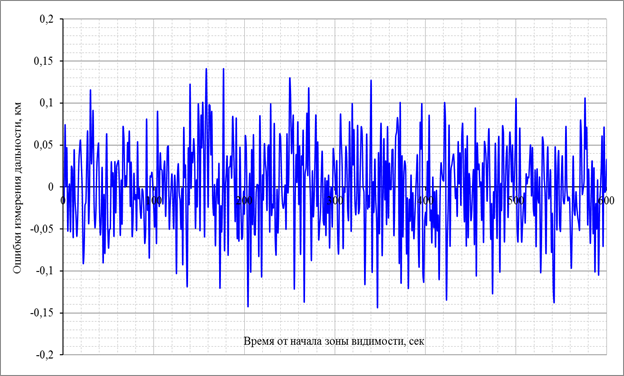
3. Результаты моделирования выводятся на печать в виде графиков: - зависимости текущих значений истинной и оцененной по измерениям Высоты полёта ИСЗ от времени; - зависимостей измеренных значений дальности и радиальной скорости от времени; - зависимостей ошибок измерений дальности и радиальной скорости от времени; - зависимости ошибки оценивания текущей высоты полёта ИСЗ от времени; - зависимостей диагональных элементов апостериорной ковариационной матрицы ошибок оценки вектора состояния.
Содержание пояснительной записки 1. Титульный лист. 2. Задание с указанием исходных данных варианта. 3. Описание моделей и методик расчёта. 4. Графический материал, иллюстрирующий результаты расчётов. 5. Выводы об устойчивости алгоритма фильтрации и точности оценивания текущей высоты полёта.
Варианты исходных данных Таблица 1.2.
Пример графического представления результатов моделирования.
Рис. 1.2. Относительная дальность ИСЗ – станция слежения.
Рис.1.3. Радиальная скорость ИСЗ – станция слежения.
Рис. 1.4. Реальная высота полёта ИСЗ и её оценка с помощью алгоритма Калмана.
Рис. 1.5. Ошибка оценивания высоты полёта ИСЗ.
Рис. 1.6. Случайная реализация ошибок измерения дальности ИСЗ – станция слежения.
Рис. 1.7. Случайная реализация ошибок измерения радиальной скорости ИСЗ – станция слежения.
Рис. 1.8. Значения диагональных элементов апостериорной ковариационной матрицы оценки вектора состояния ИСЗ (характеристики точности оценки положения).
Рис. 1.9. Значения диагональных элементов апостериорной ковариационной матрицы оценки вектора состояния ИСЗ (характеристики точности оценки скорости). Глава 2. Проектирование системы управления спуском в атмосфере Земли пилотируемых КА. Порядок выполнения работы.
4. Разрабатывается программно-математическое обеспечение для интегрирования (например, методом Эйлера [3]) дифференциальных уравнений модели динамической системы по заданным начальным условиям (шаг интегрирования принять равным 0.2 сек, в качестве условия окончания траектории принять высоту 5 км). 5. Программно-математическое обеспечение может создаваться в любой удобной для студента среде программирования (MATHLAB, MATCAD, С++, Фортран, Assembler и т.п). 6. Проводится моделирование процесса спуска ЛА с номинальной программой изменения угла крена до достижения конечной высоты. Варианты номинальных программ изменения угла крена как функции высоты полёта приведены в таблице 2.3.
Таблица 2.3.
Определяются зависимости параметров траектории спуска от времени (см. пример выполнения задания). Запоминаются значения географических координат конечной точки номинальной траектории: широта где α сж = 0.003352824419 – коэффициент сжатия земного эллипсоида; долгота 7. Запоминаются вектора состояния ЛА в моменты достижения промежуточных значений высот: 50 км, 45 км, 40 км, 35 км, 30 км, 25 км, 20 км, 15 км, 10 км.
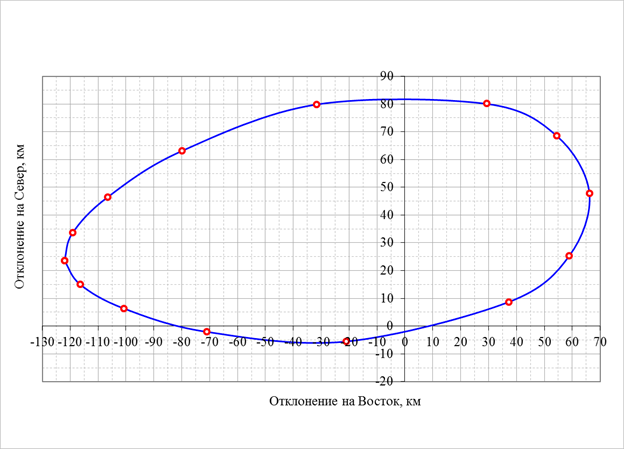
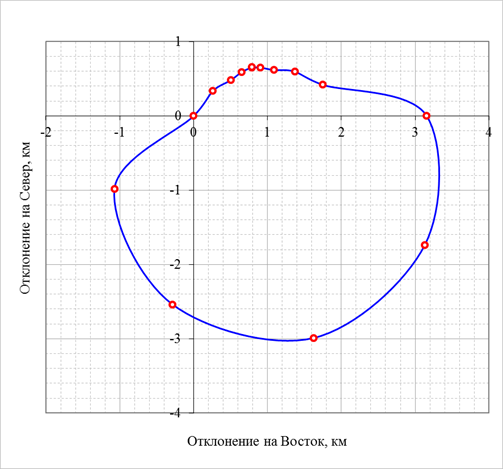
8. Для каждой из промежуточных высот рассчитываются оставшиеся части траектории спуска ЛА при условии движения с постоянным значением угла крена (последовательно выбираются значения -180°, -150°, -120°, -90°, -60°, -30°, -15°, 0°, 15°, 30°, 60°, 90°, 120°, 150°, 180°). Для каждого значения угла крена вычисляются отклонения конечной точки траектории от номинальной на Север
где 9. Геометрическое место конечных точек траектории спуска для фиксированных значений угла крена (для каждой из промежуточных высот) представляет собой границу зоны манёвра ЛА, которая может быть построена как
10. Результаты расчётов оформляются в виде графиков (см. пример выполнения – выполнены в среде EXCEL). Содержание пояснительной записки 1. Титульный лист установленного образца. 2. Задание с указанием исходных данных варианта. 3. Описание моделей и методик расчёта. 4. Графический материал, иллюстрирующий результаты расчётов. 5. Выводы о запасах маневренных возможностей ЛА, характере их изменения, форме и ориентации зон манёвра ЛА.
Варианты исходных данных. Таблица 2.4.
2.9. Пример оформления результатов выполнения работы.
Рис. 2.2. Трасса спуска ЛА (Приближённо указана высота полёта)
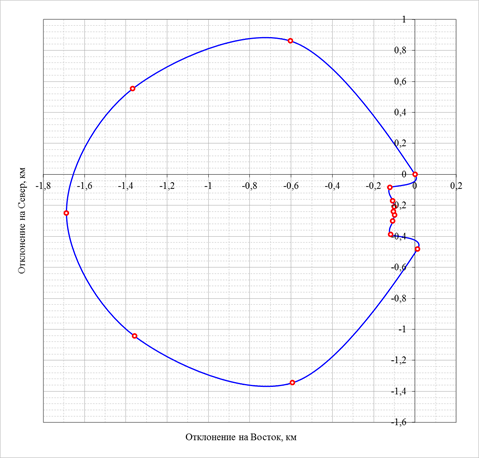
Рис. 2.3. Конечный участок трассы спуска ЛА (Приближённо указана высота полёта) Рис. 2.4. Зависимость высоты полёта ЛА при спуске в атмосфере
Рис. 2.5. Номинальная программа изменения угла скоростного крена ЛА.
Рис. 2.6. Зависимость полной перегрузки, действующей на ЛА при спуске Рис. 2.7. Зависимость относительной скорости полёта ЛА при спуске.
Таблица 2.5. Начальная высота маневрирования 50 км.
Крен, Dвост, Dсев, nmax, град км км ед.g0
-180.0 -122.013 23.683 9.90 -150.0 -119.079 33.622 9.30 -120.0 -106.538 46.487 7.68 -90.0 -79.903 63.150 5.60 -60.0 -31.750 79.894 3.75 -30.0 29.265 80.154 2.73 -15.0 54.450 68.644 2.52 0.0 66.203 47.924 2.46 15.0 58.950 25.290 2.52 30.0 37.163 8.665 2.74 60.0 -21.118 -5.526 3.76 90.0 -71.000 -2.028 5.63 120.0 -100.779 6.427 7.70 150.0 -116.345 15.056 9.32 180.0 -122.013 23.683 9.90
Рис. 2.8. Зона манёвра ЛА для высоты начала маневрирования 50 км.
Таблица 2.6. Начальная высота маневрирования 45 км. Крен, Dвост, Dсев, nmax, град км км ед.g0
-180.0 -65.204 26.823 7.61 -150.0 -63.074 34.776 7.20 -120.0 -54.485 44.440 6.07 -90.0 -36.707 55.910 4.62 -60.0 -5.546 65.748 3.34 -30.0 33.096 63.342 2.74 -15.0 49.920 54.017 2.66 0.0 57.809 37.596 2.64 15.0 52.238 20.308 2.66 30.0 37.163 8.665 2.74 60.0 0.000 0.000 3.35 90.0 -31.882 4.014 4.64 120.0 -51.279 11.770 6.09 150.0 -61.534 19.479 7.21 180.0 -65.204 26.823 7.61
Рис. 2.9. Зона манёвра ЛА для высоты начала маневрирования 45 км. Таблица 2.7. Начальная высота маневрирования 40 км. Крен, Dвост, Dсев, nmax, град км км ед.g0
-180.0 -35.236 22.574 5.79 -150.0 -33.617 28.351 5.52 -120.0 -28.258 34.849 4.82 -90.0 -17.811 41.699 3.96 -60.0 -0.308 46.236 3.34 -30.0 20.801 42.636 3.19 -15.0 30.924 35.491 3.17 0.0 35.391 23.160 3.16 15.0 30.802 10.931 3.17 30.0 20.796 3.842 3.19 60.0 0.000 0.000 3.35 90.0 -17.350 4.109 3.97 120.0 -27.878 10.590 4.83 150.0 -33.418 16.868 5.53 180.0 -35.236 22.574 5.79
Рис. 2.10. Зона манёвра ЛА для высоты начала маневрирования 40 км Таблица 2.8. Начальная высота маневрирования 35 км. Крен, Dвост, Dсев, nmax, град км км ед.g0
-180.0 -17.059 16.900 4.08 -150.0 -15.746 20.847 3.94 -120.0 -12.357 24.951 3.60 -90.0 -6.386 28.764 3.34 -60.0 2.941 30.436 3.33 -30.0 13.622 27.252 3.33 -15.0 19.548 22.177 3.33 0.0 21.757 13.132 3.33 15.0 17.726 4.874 3.33 30.0 10.967 1.071 3.33 60.0 0.000 0.000 3.33 90.0 -8.744 3.358 3.34 120.0 -13.879 8.162 3.60 150.0 -16.468 12.788 3.95 180.0 -17.059 16.900 4.08 Рис. 2.11. Зона манёвра ЛА для высоты начала маневрирования 35 км. Таблица 2.9. Начальная высота маневрирования 30 км. Крен, Dвост, Dсев, nmax, град км км ед.g0
-180.0 -5.694 10.330 2.70 -150.0 -4.665 12.453 2.70 -120.0 -2.732 14.509 2.70 -90.0 0.185 16.188 2.70 -60.0 4.386 16.517 2.69 -30.0 8.981 14.713 2.69 -15.0 12.383 11.393 2.69 0.0 12.999 5.302 2.69 15.0 9.376 0.419 2.69 30.0 4.878 -0.752 2.69 60.0 0.000 0.000 2.69 90.0 -3.451 2.357 2.70 120.0 -5.155 5.242 2.70 150.0 -5.833 7.977 2.70 180.0 -5.694 10.330 2.70
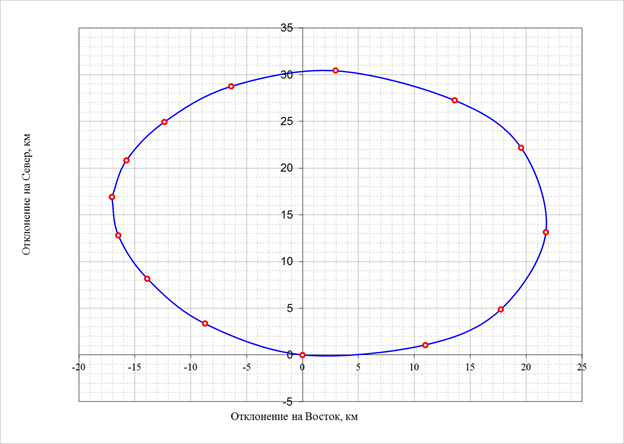
Рис. 2.12. Зона манёвра ЛА для высоты начала маневрирования 30 км.
Таблица 2.10. Начальная высота маневрирования 25 км. Крен, Dвост, Dсев, nmax, град км км ед.g0
-180.0 -1.056 5.517 1.85 -150.0 -0.432 6.411 1.85 -120.0 0.618 7.212 1.85 -90.0 2.038 7.876 1.85 -60.0 4.038 7.886 1.85 -30.0 6.450 7.249 1.85 -15.0 8.573 4.801 1.85 0.0 8.265 0.684 1.84 15.0 5.084 -1.906 1.85 30.0 1.899 -1.579 1.85 60.0 0.000 0.000 1.85 90.0 -1.146 1.628 1.85 120.0 -1.441 3.166 1.85 150.0 -1.410 4.486 1.85 180.0 -1.056 5.517 1.85
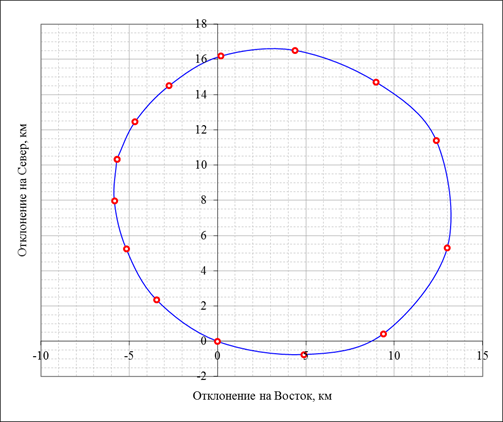
Рис. 2.13. Зона манёвра ЛА для высоты начала маневрирования 25 км.
Таблица 2.11. Начальная высота маневрирования 20 км.
Крен, Dвост, Dсев, nmax, град км км ед.g0
-180.0 0.425 2.760 1.48 -150.0 0.776 3.053 1.46 -120.0 1.321 3.285 1.43 -90.0 2.056 3.507 1.42 -60.0 3.135 3.415 1.42 -30.0 4.898 3.240 1.42 -15.0 6.167 1.149 1.42 0.0 5.257 -1.726 1.42 15.0 2.472 -2.840 1.42 30.0 0.312 -1.733 1.42 60.0 0.000 0.000 1.42 90.0 -0.177 1.068 1.42 120.0 -0.020 1.819 1.43 150.0 0.164 2.384 1.47 180.0 0.425 2.760 1.48
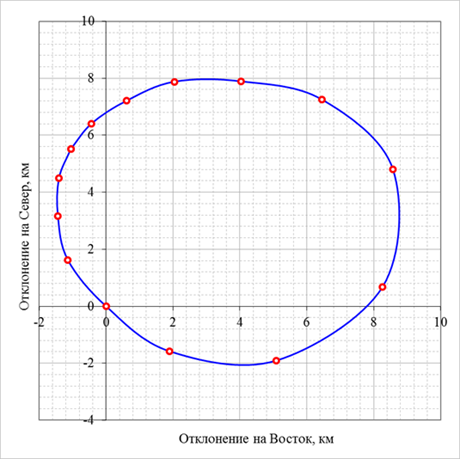
Рис. 2.14. Зона манёвра ЛА для высоты начала маневрирования 20 км.
Таблица 2.12. Начальная высота маневрирования 15 км. Крен, Dвост, Dсев, nmax, град км км ед.g0
-180.0 0.788 0.656 1.32 -150.0 0.903 0.651 1.31 -120.0 1.084 0.620 1.30 -90.0 1.369 0.598 1.28 -60.0 1.751 0.419 1.27 -30.0 3.155 0.002 1.27 -15.0 3.132 -1.736 1.27 0.0 1.622 -2.991 1.27 15.0 -0.289 -2.536 1.27 30.0 -1.072 -0.981 1.27 60.0 0.000 0.000 1.27 90.0 0.259 0.336 1.28 120.0 0.504 0.482 1.30 150.0 0.651 0.592 1.31 180.0 0.788 0.656 1.32
Рис. 2.15. Зона манёвра ЛА для высоты начала маневрирования 15 км.
Таблица 2.13. Начальная высота маневрирования 10 км. Крен, Dвост, Dсев, nmax, град км км ед.g0
-180.0 -0.104 -0.238 1.18 -150.0 -0.099 -0.263 1.18 -120.0 -0.108 -0.301 1.18 -90.0 -0.117 -0.388 1.17 -60.0 0.012 -0.480 1.17 -30.0 -0.594 -1.344 1.17 -15.0 -1.358 -1.043 1.17 0.0 -1.688 -0.249 1.17 15.0 -1.368 0.553 1.17 30.0 -0.603 0.862 1.17 60.0 0.000 0.000 1.17 90.0 -0.121 -0.084 1.17 120.0 -0.109 -0.170 1.18 150.0 -0.100 -0.209 1.18 180.0 -0.104 -0.238 1.18
Рис. 2.16. Зона манёвра ЛА для высоты начала маневрирования 15 км.
КОСМИЧЕСКИХ АППАРАТОВ
В авторской редакции Компьютерный набор и вёрстка С.И.Кудрявцева По тематическому плану внутривузовских изданий учебной и научной литературы на 2015 г.
Подписано в печать ХХ.ХХ.2015. Формат 60× 90 1/16. Бумага 80 г/м2 Гарнитура «Таймс». Ризография. Усл. печ. л. 2, 5. Тираж 50 экз. Заказ № ХХХ.
Издательство Московского государственного университета леса. 141005, Мытищи-5, Московская обл., 1-я Институтская, 1, МГУЛ. E-mail: [email protected]
По вопросам приобретения литературы издательства ФГБОУ ВПО МГУЛ обращаться в отдел реализации. Телефон: (498) 687-41-33, E-mail: [email protected]
Проектирование систем управления космических аппаратов по дисциплине “Системы управления ракет-носителей и космических аппаратов” Рекомендовано к изданию Редакционно-издательским советом университета в качестве учебно-методического пособия по курсовому проектированию для студентов специальности 24.05.06 «Системы управления летательными аппаратами» (Специализация №1 «Системы управления ракет-носителей и космических аппаратов»)
Москва Издательство Московского государственного университета леса 2015 УДК 685.515 Ф33
Разработано в соответствии с требованиями ФГОС ВПО с учётом рекомендаций ПрООП ВПО на основе программы дисциплины «Системы управления ЛА» Рецензенты: П.А. Тарасенко, к.т.н., профессор кафедры ИИС и ТП МГУЛ,
А.Ю. Кутоманов, ведущий инженер ФГУП ЦНИИмаш, отдел 3031
Работа подготовлена на кафедре «Системы автоматического управления»
Кудрявцев С.И. Ф33 Проектирование систем управления космических аппаратов: методическое пособие по курсовому проектированию. – М.: ФГБОУ ВПО МГУЛ, 2015. – 36 с.
Учебно-методическое пособие состоит из двух глав и содержит описание двух задач, связанных с проектированием систем управления космических аппаратов. В главе 1 описана задача определения параметров орбиты искусственного спутника Земли по измерениям с наземной станции слежения. В упрощённой постановке (плоский случай) приведена система дифференциальных уравнений движения центра масс ИСЗ, описаны модель измерений и соотношения дискретного фильтра Калмана, использующегося для обработки измерительной информации. Предложены варианты исходных данных для проведения расчётов по моделированию процесса оценивания текущей высоты полёта ИСЗ. Приведен пример выполнения расчёта и представления результатов. Глава 2 включает описание одной из основных задач, в обязательном порядке решаемой при баллистическом проектировании систем управления спуском – задачи оценки маневренных возможностей спускаемого аппарата. Приведена система дифференциальных уравнений движения центра масс СА, описаны модели действующих на СА сил. Предложены варианты исходных данных для проведения расчётов. Приведен пример выполнения расчёта и представления результатов.
УДК 685.515
© С.И. Кудрявцев, 2015 © ФГБОУ ВПО МГУЛ, 2015
Оглавление Глава 1. Синтез наблюдателя на базе дискретного алгоритма фильтрации Калмана
1.1. Введение. Цели выполнения работы………………………….... 4 1.2. Описание динамический системы и измерений……………….. 4 1.3. Уравнения движения ИСЗ………………………………………. 5 1.4. Начальные условия движения ИСЗ…………………………….. 5 1.5. Модель измерений………………………………………………. 6 1.6. Описание алгоритма обработки измерительной информации (дискретный фильтр Калмана)………………………………..... 6 1.7. Порядок выполнения работы…………………………………… 8 1.8. Содержание пояснительной записки…………………………… 9 1.9. Варианты исходных данных…………………………………… 10 1.10.Пример графического представления результатов моделирования…………………………………………………. 11
Глава 2. Проектирование системы управления спуском в атмосфере Земли пилотируемых КА 2.1. Введение. Цели выполнения работы………………………….. 15 2.2. Описание динамический системы………………….................... 16 2.3. Уравнения движения центра масс ЛА………………………… 16 2.4. Начальные условия движения ЛА…………………………….. 18 2.5. Расчёт плотности атмосферы Земли…………………………... 18 2.6. Порядок выполнения работы…………………………………… 20 2.7. Содержание пояснительной записки………………………….. 21 2.8.Варианты исходных данных…………………………………… 22 2.9. Пример оформления результатов выполнения работы…….... 23 Библиографический список к главам 1, 2 …………………………... 35
Глава 1. Синтез наблюдателя на базе дискретного алгоритма фильтрации Калмана
|
Последнее изменение этой страницы: 2019-10-04; Просмотров: 264; Нарушение авторского права страницы
 – модуль радиуса-вектора центра масс ИСЗ;
– модуль радиуса-вектора центра масс ИСЗ; 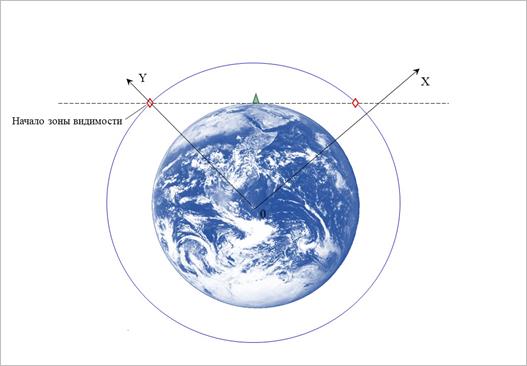
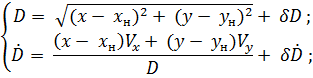
 – относительная дальность;
– относительная дальность;  – радиальная скорость;
– радиальная скорость;  ,
,  – координаты наземной станции слежения:
– координаты наземной станции слежения:  ,
,  – случайные ошибки измерений (нормальный закон распределения –
– случайные ошибки измерений (нормальный закон распределения – ;
;  ,
,  – возможные ошибки прогнозирования положения и
– возможные ошибки прогнозирования положения и , км
, км
 , м
, м
 , м/сек
, м/сек






 ;
;  .
. и Восток
и Восток  , а также максимальное значение перегрузки n:
, а также максимальное значение перегрузки n:  ;
; 
 ;
;  ;
;  = 6371 км – средний радиус Земли;
= 6371 км – средний радиус Земли;  = 9.80665 м/сек2 – ускорение свободного падения на уровне моря.
= 9.80665 м/сек2 – ускорение свободного падения на уровне моря. .
.