|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Уравнения с одним неизвестным
Вводные замечания
Выражение для нелинейного уравнения имеет следующий вид:
где Алгебраические уравнения содержат только алгебраические функции (целые, рациональные, иррациональные). Общий вид алгебраического уравнения n-ой степени относительно неизвестного х:
Трансцендентные уравнения содержат тригонометрическую, показательную, логарифмическую и другие функции. Примером такого уравнения является выражение (1.9). Аналитически можно решить только простейшие нелинейные уравнения. Эти методы позволяют записать корни в виде некоторого конечного соотношения (формулы). Решение получается сразу путем однократного использования формул или после некоторых преобразований. Пример – решение квадратного уравнения по формулам (1.8). Сложные нелинейные уравнения решают численно. Для этого используют итерационные методы (методы последовательных приближений) [19]. Итерационные численные методы состоят из 2-х этапов: 1) отыскание приближенного (грубого) значения корня или содержащего его отрезка; 2) уточнение приближенного значения до некоторой заданной степени точности. Начальное приближение Итерационный процесс состоит в последовательном уточнении начального приближения Метод половинного деления Метод позволяет решать трансцендентные, а также алгебраические уравнения [8]. Это один из простейших численных методов. На первом этапе необходимо найти отрезок В качестве начального приближения корня Пусть для определенности
Рис. 2.1. Графическая иллюстрация метода половинного деления
Итерационный процесс продолжается до тех пор, пока значение функции
2.1.3. Блок-схема метода половинного деления и числовой пример Сужение отрезка производится путем замены границ а или b на текущее значение корня х. При этом значение нам нужен только знак функции Метод половинного деления отрезка пополам довольно медленный, т.е. для вычисления корня
Рис. 2.2. Блок-схема метода половинного деления
Рассмотрим пример вычисления методом половинного деления одного корня уравнения Для определения отрезка выполним табулирование функции Можно принять что, а = 0, 9 и b = 1, 2, так как f (0, 9) × f (1, 2) < 0. Для
Таблица 2.1 Результаты табулирования функции f ( x )
уменьшения отрезка Примем значение а = 1, 1; f (1, 1) = 0, 29. Окончательно принимаем: а = 1, 1; b = 1, 2; f (1, 1) × f (1, 2) < 0. Следовательно, искомый корень Последовательно имеем (n – номер итерации): 1) f (x) = f [(a+b)/2] = f (1, 15) = 0, 119; n = 1; 2) f [(1, 15+1, 2)/2] = f (1, 175) = 0, 030; n = 2; 3) f [(1, 175+1, 2)/2] = f (1, 1875) = -0, 016; n = 3; 4) f [(1, 175+1, 1875)/2] = f (1, 18125) = 0, 007; n = 4; 5) f [(1, 1875+1, 18125)/2] = f (1, 184375)=- 0, 004; n = 5; ½ f (x)½ < 0, 005; (e = 0, 005). Корень х = х* = 1, 184375.
Метод хорд Пусть найден отрезок Для вывода расчетных формул запишем уравнение хорды АВ (уравнение прямой линии, проходящей через две заданные точки):
Для точки пересечения АВ с осью абсцисс (х = х0; у = 0) получим:
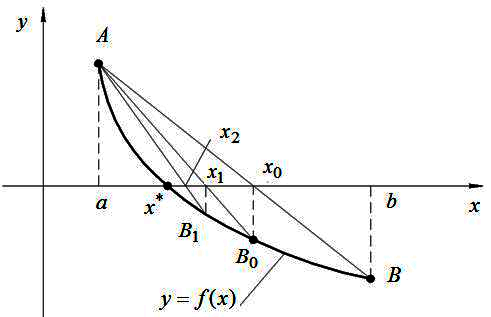
Рис. 2.3. Графическая иллюстрация к методу хорд
На первом этапе вычисления определяем х0 по формуле (2.3). Затем определяем f (х0). Так как f (a) × f (x0) < 0, то искомый корень находится на Блок-схема метода хорд аналогична методу половинного деления. Разница в том, что вместо вычисления приближения корня по формуле x = (a+b)/2 нужно использовать формулу (2.3). Необходимо также ввести операторы вычисления f (x) на границах новых отрезков. Алгоритм метода хорд часто дает более быструю сходимость итерационного процесса по сравнению с методом половинного деления. При этом процесс итераций также всегда сходится (к решению с заданной точностью). Рассмотрим пример вычисления методом хорд одного корня уравнения
Значение f (1, 182) = 0, 004. Следовательно, условие ½ f(x)½ < e выполняется. Корень уравнения х* = х0 = 1, 182. Решение найдено за одну итерацию (n =1). Методом половинного деления решение найдено за 5 итераций. Если погрешность e взять меньше (e = 0, 001), то потребуется вторая итерация: a = x0 = 1, 182 (так как f (1, 182) × f (1, 2) < 0);
Более точный корень уравнения х* = х1 = 1, 18309. Метод хорд в этом случае (и чаще всего) оказался эффективнее метода половинного деления.
Метод простой итерации
Исходное уравнение
Задают начальное приближение корня
Далее подставляем каждый раз новое значение корня в (2.4) получаем последовательность значений:
Итерационный процесс прекращается, если результаты двух последовательных итераций близки:
Здесь Сходимость метода простой итерации зависит от выбора начального приближения Блок-схема метода простой итерации приведена на рис. 2.4. В блок-схеме приведены следующие обозначения:
Рис. 2.4. Блок-схема метода простых итераций
В качестве примера решим уравнение точность Пусть начальное приближение
Искомый корень
Системы уравнений Метод простой итерации Решаем два нелинейных уравнения с двумя неизвестными [13]: Действительные корни необходимо найти с заданной точностью
Графически или другой прикидкой определяем начальные приближения корней
Если итерационный процесс (2.9) сходится, то при некотором числе итераций n, выполняются условия:
При выполнении условий (2.10) вычисления прекращают. Искомые корни При создании компьютерной программы необходимо предусмотреть ограничение числа итераций, так как вычислительный процесс может расходиться. Для примера решим систему уравнений
Необходимо определить положительные корни с точностью Начальные приближения
Задаем Таблица 2.2 Результаты расчетов по формулам (2.12) и (2.13)
Рис. 2.5. Графики, построенные по формулам (2.12) и (2.13)
Теперь из исходной системы (2.11) получим формулы вида (2.8):
Запишем формулы (2.14) в виде, удобном для построения итерационного процесса:
Здесь n – номер итерации. Вычисления по формулам (2.15) приведены в табл. 2.3. Корни найдены на шестой итерации ( Отметим, что вместо рассмотренного метода последовательных приближений (2.9), иногда удобнее пользоваться методом Зейделя:
Метод Зейделя для системы из 3-х уравнений:
Таблица 2.3 Значения последовательных приближений
Метод Ньютона
Обладает гораздо более быстрой сходимостью, чем метод простой итерации. Рассмотрим применение метода для решения системы 2-х нелинейных уравнений [18]:
В основе метода Ньютона для системы уравнений (2.16) служит разложение функций Пусть приближенные значения неизвестных системы (2.16) равны соответственно
Проведем разложение левых частей уравнений (2.16) с учетом (2.17) в ряд Тейлора, ограничиваясь лишь линейными членами относительно приращений (или производными первого порядка):
Поскольку в соответствии с (2.16) левые части этих выражений равны 0, то приравниваем 0 и левые части. Получим следующую систему линейных уравнений относительно приращений
Здесь значения Неизвестные
Здесь
Для существования единственного решения системы (2.19) на каждой итерации должно выполняться условие J ≠ 0. После определения Таким образом, итерационный процесс решения системы (2.16) методом Ньютона состоит в определении приращений
где Метод Ньютона применим для решения системы из n уравнений (n = 2, 3, 4, …). Следует учитывать, что сходимость итерационного процесса ухудшается с увеличением n. Для обеспечения хорошей сходимости важен выбор первого приближения. 2.2.3. Блок-схема метода Ньютона и пример для системы двух уравнений
Блок схема алгоритма метода Ньютона приведена на рис. 2.6. В блоке 2 осуществляется ввод исходных данных: а, b - начальные приближения неизвестных; В качестве примера решим систему нелинейных уравнений: Определим положительные корни с погрешностью
Из второго уравнения системы (2.23) также выразим х:
Задаем последовательно
Рис. 2.6. Блок схема алгоритма метода Ньютона
кривые f1 и f2 (рис. 2.7). Координаты точки пересечения кривых f 1 и f 2 являются начальными приближениями, т.е. а = 0, 9; b = 0, 5 (рис. 2.7). Отметим, что при построении графиков в приложении Excel переменная у в рассматриваемом примере автоматически отложится на горизонтальной оси, так как у задавали, а х вычисляли. Получим формулы для
Рис. 2.7. Графическое определение начальных приближений а и b
Итерация i = 1: a = 0, 9; b = 0, 5; вычисляем J, D х, D у по (2.26), (2.27), (2.28) при x = a, y = b; J = -4, 23; D х = 0, 289; D у = - 0, 2664;
Итерация i = 2: в (2.26), (2.27), (2.28) подставляем a = x = 0, 8317; b = y = 0, 5630; J = -3, 9998; D х = 0, 0225; D у = -0, 0025;
х = 0, 8317 - 0, 00562 = 0, 8261; у = 0, 5630 + 0, 00063 = 0, 5636;
Итерация i = 3: a = x = 0, 8261; b = y = 0, 5636; J = -3, 9537; D х = 0, 0001; D у = -0, 0001;
х = 0, 8261 - 0, 00003 = 0, 8260; у = 0, 5636 + 0, 00002 = 0, 5636;
Вычисления окончены. Корни системы (2.23) с заданной точностью найдены.
|
Последнее изменение этой страницы: 2019-10-04; Просмотров: 169; Нарушение авторского права страницы
 , (2.1)
, (2.1) - некоторая непрерывная функция. Нелинейные уравнения делятся на алгебраические и трансцендентные.
- некоторая непрерывная функция. Нелинейные уравнения делятся на алгебраические и трансцендентные. . (2.2)
. (2.2) может быть найдено из физической постановки решаемой задачи. Если
может быть найдено из физической постановки решаемой задачи. Если  найти не удается, то построением графика функции
найти не удается, то построением графика функции  , входящей в уравнение, определяют две близко расположенные точки
, входящей в уравнение, определяют две близко расположенные точки  и
и  , в которых
, в которых  принимает значения разных знаков, т.е.
принимает значения разных знаков, т.е.  . В этом случае между точками a и b есть, по крайней мере, одна точка, в которой
. В этом случае между точками a и b есть, по крайней мере, одна точка, в которой  . Здесь х* - корень уравнения. В начале выполнения итераций в качестве начального приближения
. Здесь х* - корень уравнения. В начале выполнения итераций в качестве начального приближения  можно принять середину отрезка
можно принять середину отрезка  , т.е.
, т.е.  .
. . Если эти значения с ростом n приближаются к истинному значению корня х*, то говорят, что итерационный процесс сходится.
. Если эти значения с ростом n приближаются к истинному значению корня х*, то говорят, что итерационный процесс сходится.  . При этом используют условие, что
. При этом используют условие, что  . Если уравнение имеет несколько корней, то последовательно задается несколько отрезков и на каждом определяется свой корень.
. Если уравнение имеет несколько корней, то последовательно задается несколько отрезков и на каждом определяется свой корень. принимают середину отрезка
принимают середину отрезка  . Далее определяют значение функции
. Далее определяют значение функции  и
и  . Тот из них, на концах которого
. Тот из них, на концах которого  раз.
раз. < 0,
< 0,  > 0 (рис. 2.1). Находим начальное приближение корня
> 0 (рис. 2.1). Находим начальное приближение корня  < 0, то
< 0, то  и рассматриваем только
и рассматриваем только  . На следующем приближении
. На следующем приближении  . Теперь отбрасываем отрезок
. Теперь отбрасываем отрезок  , так как
, так как  > 0 и
> 0 и  > 0, т.е. x0 < x * < x1. Аналогично находим другие приближения:
> 0, т.е. x0 < x * < x1. Аналогично находим другие приближения:  т.д.
т.д.
 .
.  вычисляется лишь один раз, так как
вычисляется лишь один раз, так как с заданной точностью e может потребоваться большое количество итераций. Однако метод всегда сходится, т.е. при его использовании решение получается всегда. На рис. 2.2 представлена блок-схема метода половинного деления.
с заданной точностью e может потребоваться большое количество итераций. Однако метод всегда сходится, т.е. при его использовании решение получается всегда. На рис. 2.2 представлена блок-схема метода половинного деления.
 с заданной точностью e = 0, 005.
с заданной точностью e = 0, 005. . Результаты табулирования представлены в табл. 2.1.
. Результаты табулирования представлены в табл. 2.1. находится на заданном отрезке, т.е.
находится на заданном отрезке, т.е.  .
. .
.
 ;
;  ;
;  . (2.3)
. (2.3) (см. рис. 2.3). Отрезок
(см. рис. 2.3). Отрезок  отбрасываем. Следующая итерация состоит в определении нового приближенного значения х1 как точки пересечения хорды АВ0 с осью абсцисс и т.д. Для определения х1 в формулу (2.3) подставим b = х0 и f (b) = f (х0). Итерационный процесс продолжается до тех пор, пока значение f (хn) не станет по модулю меньше заданного числа e, т.е.
отбрасываем. Следующая итерация состоит в определении нового приближенного значения х1 как точки пересечения хорды АВ0 с осью абсцисс и т.д. Для определения х1 в формулу (2.3) подставим b = х0 и f (b) = f (х0). Итерационный процесс продолжается до тех пор, пока значение f (хn) не станет по модулю меньше заданного числа e, т.е.  .
.  по формуле (2.3):
по формуле (2.3):  .
. ; f (1, 18309) = 0, 0004.
; f (1, 18309) = 0, 0004. преобразуют к виду [8]:
преобразуют к виду [8]:  . (2.4)
. (2.4) . Подставляя это значение в правую часть (2.4) получаем новое приближение:
. Подставляя это значение в правую часть (2.4) получаем новое приближение:  .
. . (2.5)
. (2.5) (2.6)
(2.6) - заданная точность. Обычно
- заданная точность. Обычно  = 10-6…10-2.
= 10-6…10-2. и преобразования исходного уравнения
и преобразования исходного уравнения  к виду (2.4).
к виду (2.4). - начальное приближение корня, а в дальнейшем результат предыдущей итерации;
- начальное приближение корня, а в дальнейшем результат предыдущей итерации;  - значение корня после каждой итерации. В данной схеме предполагается, что итерационный процесс сходится. Если такой уверенности нет, то необходимо ввести счетчик итераций и ограничение по их максимальному числу.
- значение корня после каждой итерации. В данной схеме предполагается, что итерационный процесс сходится. Если такой уверенности нет, то необходимо ввести счетчик итераций и ограничение по их максимальному числу. 
 . Заданная
. Заданная . Выполняем преобразование исходного уравнения
. Выполняем преобразование исходного уравнения  .
. =1, 2. Его можно определить, например, графически. Последовательность итераций имеет следующий вид:
=1, 2. Его можно определить, например, графически. Последовательность итераций имеет следующий вид: 
 .
. (2.7)
(2.7) . Систему (2.7) преобразуем к виду:
. Систему (2.7) преобразуем к виду:  (2.8)
(2.8) . Итерационный процесс (последовательные приближения) выполняют по формулам:
. Итерационный процесс (последовательные приближения) выполняют по формулам:  (2.9)
(2.9) ,
,  (2.10)
(2.10) .
. (2.11)
(2.11) . Поэтому вычисления выполняем с 3-мя цифрами после запятой.
. Поэтому вычисления выполняем с 3-мя цифрами после запятой. определяем графически. Для этого из первого и второго уравнения выражаем
определяем графически. Для этого из первого и второго уравнения выражаем  :
:  , (2.12)
, (2.12) (2.13)
(2.13)  с равным шагом и выполняем вычисления по формулам (2.12) и (2.13). Результаты заносим в табл. 2.2. По таблице строим два графика (рис. 2.5). Точка пересечения графиков дает приближенные начальные значения
с равным шагом и выполняем вычисления по формулам (2.12) и (2.13). Результаты заносим в табл. 2.2. По таблице строим два графика (рис. 2.5). Точка пересечения графиков дает приближенные начальные значения  Все эти расчеты и построения выполняем с использованием приложения Excel.
Все эти расчеты и построения выполняем с использованием приложения Excel.
 (2.14)
(2.14) (2.15)
(2.15) ), так как выполняются условия (2.10).
), так как выполняются условия (2.10).



 (2.16)
(2.16) и
и  в ряд Тейлора, причем члены ряда, содержащие вторые производные и производные более высоких порядков, отбрасывают.
в ряд Тейлора, причем члены ряда, содержащие вторые производные и производные более высоких порядков, отбрасывают. и
и  . Их определили из начального приближения или они получены на предыдущей итерации. Обозначим приращение (или поправки) к этим значениям
. Их определили из начального приближения или они получены на предыдущей итерации. Обозначим приращение (или поправки) к этим значениям  и
и  . Через
. Через  ,
,  и
и  решение системы (2.16) запишется в виде:
решение системы (2.16) запишется в виде: 
 . (2.17)
. (2.17) (2.18)
(2.18)
 (2.19)
(2.19) и их производные вычисляют при х = а; у = b.
и их производные вычисляют при х = а; у = b. вычисляют по правилу Крамера:
вычисляют по правилу Крамера:  . (2.20)
. (2.20) – определители системы (2.19):
– определители системы (2.19):  ,
,  . (2.21)
. (2.21) и
и  по формуле (2.20)
по формуле (2.20)  и
и  определяют по формуле (2.17). Напомним, что здесь а и b - значения неизвестных на предыдущей итерации, а x и y – значения неизвестных на рассматриваемой итерации.
определяют по формуле (2.17). Напомним, что здесь а и b - значения неизвестных на предыдущей итерации, а x и y – значения неизвестных на рассматриваемой итерации. и
и  к значениям неизвестных на каждой итерации. Вычисления прекращаются, если все вычисления становятся малыми по абсолютной величине:
к значениям неизвестных на каждой итерации. Вычисления прекращаются, если все вычисления становятся малыми по абсолютной величине:  ,
,  , (2.22)
, (2.22) - заданная точность.
- заданная точность. - погрешность вычислений;
- погрешность вычислений;  - максимально допустимое число итераций. В блоке 6 «да» будет в том случае, если выполнятся оба условия. В блоке 5 а, b - значения неизвестных на предыдущей итерации; x, y - значения на рассматриваемой итерации.
- максимально допустимое число итераций. В блоке 6 «да» будет в том случае, если выполнятся оба условия. В блоке 5 а, b - значения неизвестных на предыдущей итерации; x, y - значения на рассматриваемой итерации. (2.23)
(2.23) . Начальные приближения найдем графической прикидкой. Для этого из первого уравнения системы (2.23) выразим х:
. Начальные приближения найдем графической прикидкой. Для этого из первого уравнения системы (2.23) выразим х:  (2.24)
(2.24) . (2.25)
. (2.25) и определяем значения х по формулам (2.24) и (2.25). По полученным точкам строим соответственно
и определяем значения х по формулам (2.24) и (2.25). По полученным точкам строим соответственно
 по исходной системе уравнений (2.23):
по исходной системе уравнений (2.23): 
 (2.26)
(2.26) =
=  (2.27)
(2.27) (2.28)
(2.28)



 .
.