
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Работа №5. СПОСОБЫ ПУСКА И ТОРМОЖЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ В СИСТЕМЕ ПЧ-АД
Цель работы
Исследовать возможности и способы пуска и торможения электродвигателя в системе ПЧ-АД
Программа работы
1. Изучить схему для снятия характеристик системы ПЧ-АД. 2. Подготовить преобразователь к работе. 3. Опробовать способы пуска АД 4. Опробовать способы торможения АД.
Пояснения к работе
В лабораторной работе используются следующие модули: – модуль питания стенда (МПС); – модуль питания (МП); – силовой модуль (СМ); – модуль преобразователя частоты (ПЧ).
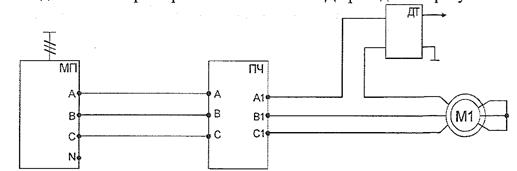
Исследуемый асинхронный электродвигатель с короткозамкнутым ротором входит в состав электромашинного агрегата, включающего в себя собственно исследуемый двигатель M1, нагрузочную машину - двигатель постоянного тока независимого возбуждения – М2, импульсный датчик скорости М3. Перед проведением работы при выключенных автоматических выключателях QF1 и QF2 модулей МПС и МП привести модули в исходное состояние: – переключатель SA1 модуля ПЧ перевести в среднее положение, SA2 – в положение «Скорость», потенциометр RP1 – в крайнее положение против часовой стрелки, установить перемычку между клеммами XS1 и XS2 модуля. Схема для снятия характеристик системы ПЧ-АД приведена на рисунке 5.1.
Рисунок 5.1 – Схема для снятия характеристик системы ПЧ-АД Статорная цепь асинхронного электродвигателя подключается к преобразователю частоты. Для контроля тока статора в одну из фаз включен датчик тока. Преобразователь частоты запитывается напряжением 3x380В от модуля питания.
5.1 Подготовка преобразователя частоты
При исследовании способов пуска/торможения системы ПЧ-АД преобразователь должен быть настроен на режим работы в разомкнутой системе со скалярным управлением. Для настройки ПЧ необходимо: – подать напряжение на ПЧ последовательным включением автоматов QF1, QF2 МПС и МП соответственно; – сбросить настройки привода на заводские для 50 Гц установкой в параметре 0.00 значения 1233; – подтвердить установку нажатием кнопки «М»; – нажать кнопку «Стоп/сброс». После сброса настроек необходимо установить в преобразователе номинальные данные электродвигателя и произвести автонастройку привода: – в параметре 0.42 установить число полюсов; – в параметре 0.43 установить номинальный коэффициент мощности; – в параметре 0.44 установить номинальное линейное напряжение двигателя; – в параметре 0.45 установить номинальную скорость двигателя; – в параметре 0.46 установить номинальный ток двигателя; – в параметре 0.47 установить номинальную частоту двигателя; – для разрешения автонастройки установить в параметре 0.40 значение 2; – разрешить работу привода переключением тумблера SA3 в положение «1». Преобразователь совершит автонастройку и при успешном окончании сбросит параметр 0.40 в 0; – после окончания процедуры снять разрешение на работу ПЧ (SA3).
5.2 Пробный пуск привода
Пробный пуск привода необходимо выполнить для того, чтобы убедиться в правильных настройках ПЧ и возможности плавного задания выходной частоты и напряжения. Для пробного пука ПЧ необходимо: – подать разрешение на работу ПЧ (переключатель SA3); – задать необходимое направление вращения (переключатель SA1); – установить потенциометром RP1 модуля необходимую частоту вращения, электродвигатель должен разогнаться до скорости, соответствующей установленной частоте; – опробовать реверс двигателя переведением переключателя SA1 в положение, противоположное установленному ранее; – остановить двигатель (SA1 в среднее положение); – убрать разрешение на работу ПЧ.
5.3 Исследование способов пуска в системе ПЧ-АД
Электропривод переменного тока, выполненный на основе преобразователя частоты инверторного типа, имеет возможность выполнять несколько способов пуска/торможения электродвигателя: – линейный пуск электродвигателя с заданным темпом; – пуск электропривода по S-рампе (S-образная диаграмма скорости). Линейный пуск заключается в разгоне электропривода до заданной скорости с увеличением частоты в зависимости от времени, установленного в настройках ПЧ. При задании максимального значения частоты время разгона будет равно времени, заданному в параметре 0.03 (2.11). При частоте, меньшей максимальной, время пуска будет рассчитываться по формуле:
где Для опробования линейного пуска электропривода необходимо: – задать максимальную частоту вращения двигателя потенциометром RP1 модуля ПЧ; – установить в параметре 0.03 (2.11) требуемое время разгона (0...3200 с); – выбрать направление вращения двигателя и подать разрешение на работу ПЧ (SA3). Электродвигатель разгонится с заданным темпом до заданной скорости. Процесс разгона желательно контролировать с помощью осциллографа, подключенного к выходам ПЧН силового модуля. Процесс разгона по S-рампе заключается в задании динамического момента, требуемого для разгона ПЧ, не постоянным на время разгона, а по определенному закону (Рисунок 5.2).
Рисунок 5.2 – Пуск электропривода с применением S-рампы
S-рампа включается установкой параметра 2.06 в значение ON. В параметре 2.07 устанавливается предел ускорения S-рампы (0...300с2/100Гц). Время линейного изменения динамического момента рассчитывается по следующей формуле: Т=(величина изменения 8-рампы)/(величина рампы), где величина рампы – время, установленное для разгона (параметр 2.11).
5.4 Исследование способов торможения в системе ПЧ-АД
Преобразователь частоты обеспечивает несколько способов торможения; – торможение на выбеге (Coast); – торможение с заданным темпом (rp); – торможение по рампе с подпиткой постоянным током (rp.dcl); – торможение постоянным током с обнаружением нулевой скорости (del); – торможение инжекцией импульса постоянного тока (td.dcl). В режиме торможения на выбеге при поступлении команды торможения инвертор отключается и двигатель останавливается на выбеге. После остановки привод нельзя включить на протяжении 1 с. В режиме торможения по рампе торможение происходит с постоянной времени, равной постоянной времени, установленной в параметре 0.04 (2.21). При торможении по рампе с подпиткой постоянным током происходит торможение по рампе до нулевой скорости, а затем – подпитка статора постоянным током с уровнем, определяемым параметром 6.06 (в процентах от номинального тока двигателя) на время, установленное в параметре 6.07 (0...25с). При торможении постоянным током с обнаружением нулевой скорости привод тормозит постоянным током с низкой частоты, а затем торможение продолжается током с уровнем, определяемым параметром 6.06 (в процентах от номинального тока двигателя) на время, установленное в параметре 6.07 (0...25с). При торможении инжекцией импульса постоянного тока торможение идет с момента подачи сигнала на торможение постоянным током с уровнем, определяемым параметром 6.06 (в процентах от номинального тока двигателя) на время, установленное в параметре 6.07 (0...25с). При проведении опытов необходимо выполнить следующие действия: – установить требуемый вид торможения (параметр 6.01); – подать разрешение на работу ПЧ (переключатель SA3); – разогнать привод до максимальной скорости, соответствующей номинальной частоте; – осуществить торможение двигателя (SA1 в среднее положение). Процесс торможения необходимо фиксировать осциллографом (в комплект поставки не входит), подключенным к выходу ПЧН силового модуля. Для контроля тока статора в цепь статора включен датчик тока силового модуля. К выходу датчика тока можно подключить осциллограф.
Контрольные вопросы
1. Для чего необходим плавный пуск/торможение? 2. Область применения торможения постоянным током системы ПЧ-АД? 3. Объяснить процесс торможения постоянным током ПЧ инверторного типа. 4. При торможении с минимальным темпом электродвигатель отдает электроэнергию в инвертор. Эта электроэнергия рассеивается на тормозном сопротивлении звена постоянного тока. Объяснить принцип работы этого звена.
|
Последнее изменение этой страницы: 2019-10-24; Просмотров: 272; Нарушение авторского права страницы

 – время разгона, заданное в параметре 0.03 (2.11), с;
– время разгона, заданное в параметре 0.03 (2.11), с;  – заданная частота, Гц;
– заданная частота, Гц;  – номинальная частота электродвигателя, Гц.
– номинальная частота электродвигателя, Гц.