
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Уравнения движения и погрешности гировертикалей
В соответствии с законом прецессии (2.1) трёхстепенного гироскопа упрощенные дифференциальные уравнения движения ротора гировертикали относительно осей наружной и внутренней рамок карданова подвеса представим в виде системы
где Н – кинетический момент ротора; Мв, Мн – моменты внешних сил, действующие относительно осей внутренней и наружной рамок соответственно (см. рис. 4.2, а). Рассмотрим траекторию движения оси вращения ротора гироскопа из отклоненного положения к истинной вертикали в случае пропорциональной характеристики системы коррекции по обеим осям. Одновременно учтём, что в опорах осей карданова подвеса действуют моменты сил трения. Тогда уравнения (4.3) можно записать следующим образом:
где К – крутизна характеристики системы коррекции, или удельный корректирующий момент; jв, jн – углы отклонения оси вращения ротора от направления истинной вертикали; Мтр.н, Мтр.в – моменты трения в подшипниковых опорах наружной и внутренней рамок карданова подвеса соответственно. Если в начальный момент времени, при t = 0, главная ось ротора гироскопа была отклонена от истинной вертикали на углы jно и jво, то траекторию восстановления можно определить, решив однородные дифференциальные уравнения, вытекающие из системы (4.4):
Решение уравнений (4.5) будет иметь вид
где Если поделим левые и правые части выражений (4.6), то получим параметрическое уравнение
Это уравнение прямой характеризует траекторию движения главной оси гироскопа из отклоненного положения к вертикали при симметричной пропорциональной коррекции и отсутствии других внешних моментов в опорах карданова подвеса (рис. 4.4, а). Рассмотрим случай, когда к гироскопу, кроме моментов коррекционных моторов, приложены другие моменты внешних сил, например сил трения. При этом уравнения (4.4) можно представить в виде
Решение уравнений (4.8) определяется выражениями
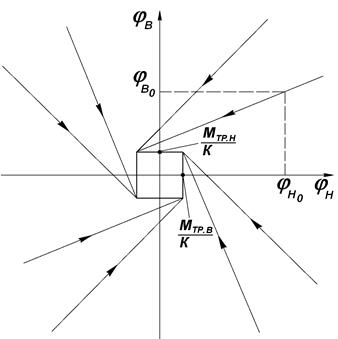
Физическая картина полученных решений объясняется так: прецессия гироскопа из отклоненного положения к истинной вертикали продолжается до тех пор, пока коррекционные моменты больше моментов трения. При равенстве этих моментов движение гироскопа прекращается. Значения
а
б Рис. 4.4. Картина восстановления гировертикали «Зоны застоя» эксплуатируемых авиагоризонтов и гировертикалей характеризуют точность определения и выдерживания истинной вертикали места до момента старта ВС, а также при горизонтальном установившемся полёте. Эти погрешности носят статистический характер и составляют от 0, 4 до 1°. Djн з @ Djв з = 0, 1…1°. Виражные погрешности гировертикалей или авиагоризонтов с маятниковой коррекцией возникают в режиме координированного разворота ВС с угловой скоростью wпри радиусе виража R. При этом самолёт накреняется на угол g (см. рис. 4.1). На маятник, кроме силы веса mg, действует ещё центробежная сила инерции mw2R. Вследствие этого маятник устанавливается в положении «ложной» вертикали, на коррекционный мотор поперечной коррекции поступает электрический сигнал, и главная ось ротора гироскопа движется к «ложной» вертикали. Этот процесс происходит тем быстрее, чем больше удельные моменты k системы коррекции. С целью уменьшения виражных погрешностей маятниковых гировертикалей принимаются следующие меры: 1. Отключение системы поперечной коррекции специальными приборами, называемыми выключателями коррекции (ВК), например ВК-53 РШ и ВК-90. 2. Наклон главной оси ротора гировертикали на некоторый достаточно малый угол в направлении движения ВС. 3. Подключение коррекционного мотора поперечной коррекции к маятниковому чувствительному элементу продольной системы коррекции, так называемый приём «крен-тангаж». Аналогично действуют на систему продольной коррекции гировертикали и линейные ускорения ах при увеличении или уменьшении скорости полёта. Поэтому в некоторых авиагоризонтах, например АГД-1, в цепи продольной коррекции предусмотрен жидкостный выключатель коррекции типа ВКЖ. При отключении коррекции гировертикаль работает в режиме «памяти». В течение времени маневрирования ВС накапливается погрешность ухода от истинной вертикали. Это происходит в соответствии с законом прецессии трёхстепенного гироскопа (4.3). Например, на оси наружной рамки на виражах ВС:
где t – время виража. Эти погрешности могут достигать 3 – 5° за 3 мин разворота. |
Последнее изменение этой страницы: 2019-10-03; Просмотров: 166; Нарушение авторского права страницы
 ;
;  , (4.3)
, (4.3) – угловые скорости прецессии гироскопа относительно осей наружной и внутренней рамок карданова подвеса соответственно;
– угловые скорости прецессии гироскопа относительно осей наружной и внутренней рамок карданова подвеса соответственно;  , (4.4)
, (4.4) ,
,  (4.5)
(4.5) ;
;  , (4.6)
, (4.6) – удельная скорость коррекции ротора.
– удельная скорость коррекции ротора. . (4.7)
. (4.7) , (4.8)
, (4.8) .
. , (4.9)
, (4.9) .
. ,
,  определяют так называемую «зону застоя», которая характеризует погрешности гировертикалей и авиагоризонтов в определении углов на неподвижном ВС или при равномерном прямолинейном движении. Зона застоя и семейство возможных траекторий восстановления главной оси ротора приведены на рис. 4.4, б.
определяют так называемую «зону застоя», которая характеризует погрешности гировертикалей и авиагоризонтов в определении углов на неподвижном ВС или при равномерном прямолинейном движении. Зона застоя и семейство возможных траекторий восстановления главной оси ротора приведены на рис. 4.4, б.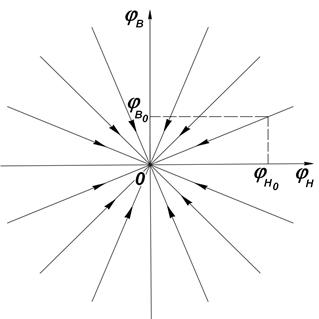
 (4.10)
(4.10)