|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Характерные ограничения на параметры СПКР
Ограничения на параметры полёта определяются прочностными и эксплуатационными характеристиками самолёта, заданными комфортными условиями, и зависят от этапа и режима полёта, состояния и характеристик объекта, экипажа и окружающей среды. Необходимая для этих целей информация поступает в вычислитель СПКР как от бортовых систем, так и от специальных устройств и систем. Например, информация об аэродинамических углах берется от датчиков углов атаки и скольжения (ДАУ), информация о перегрузках – от датчиков линейных ускорений (ДЛУ), информация о высотно-скоростных параметрах может поступать от системы воздушных сигналов (СВС) и т. д. Специальные датчики информации применяются, когда на борту самолёта такая информация отсутствует на момент разработки системы конкретного ЛА. Для удобства рассуждений под величиной Хбудем иметь в виду информацию о любом параметре. При этом различают следующие значения параметров: Хтек – текущее значение (или потребное); Хдоп – допустимое значение; Хкр – критическое значение; Хдоп min – допустимое минимальное значение; Хдоп max – допустимое максимальное значение; Хкр min – критическое минимальное значение параметра; Хкр mах – критическое максимальное значение параметра [4].
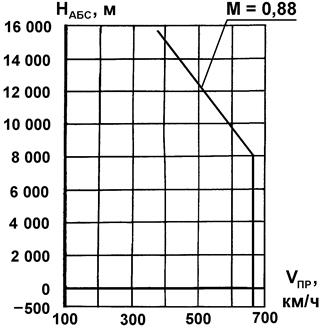
Пример характерных ограничений параметров СПКР приведён на рис. 3.4, где область эксплуатации в координатах Нбар – Vпр ограничивается (образмеривается) тремя параметрами: барометрической высотой Нбар, приборной скоростью Vпр и числом М. Видно, что между критическими и допустимыми значениями ограничиваемых параметров есть некая область, которая называется буферной зоной. Согласно [3, 4], величина буферной зоны определяется значениями: ½ Vдоп min – Vкр min½ = (0, 15…0, 3) Vкр min, ½ Vкр max – Vдоп max½ = 50 км/ч, (3.1) Мкр – М доп = 0, 05. Целью ограничения режима по минимальной скорости является предотвращение сваливания ВС из-за недостаточной подъёмной силы. Максимальная скорость ограничивается по причине предотвращения разрушения элементов конструкции из-за чрезмерно большого скоростного напора. Ограничения по числу М назначаются из условий управляемости, устойчивости работы силовой установки, допустимой величины аэродинамического нагрева. Ограничения по скорости не являются постоянными, в зависимости от этапа полёта и состояния оборудования, например двигателей, для каждого ЛА назначается большая номенклатура скоростей. Особенно много значений скоростей на этапах взлёта и посадки. Общее количество разновидностей (стандартных) скоростей составляет двадцать пять [3, 4, 13]. Большинство этих ограничений определяются в зоне малых скоростей для предотвращения сваливания. Например, минимальная эволютивная скорость разбега Vmin р назначается из условий надёжной управляемости ВС при отказе критического двигателя. Для каждого ВС назначается минимальная скорость отрыва, минимальная скорость захода на посадку, минимальная скорость захода на посадку с одним неработающим двигателем и другие скорости. При отсутствии средств, автоматически перестраивающих границы разрешенной области пилотирования, пилоту пришлось бы запоминать все ограничения. Так было до появления СПКР на борту самолета. На рис. 3.5 показаны ограничения по минимальному и максимальному значениям аэродинамического угла атаки. Ограничения по углу атаки относятся к наиболее важным лётным ограничениям для сверхзвуковых и дозвуковых ВС. Предельные значения угла атаки aдоп определяются по зависимостям Су = f (a) на различных режимах полёта из условия, что они должны отличаться от критических значений aкр (угол сваливания) не менее чем на 3…5°.
Рис. 3.5. Зависимость коэффициента подъёмной силы от угла атаки ЛА Кроме того, значения aдоп выбираются так, чтобы при выходе на эти углы не возникали самопроизвольные колебания ВС, которые пилот не мог бы парировать, обеспечивалась приемлемая управляемость ЛА, не нарушалась нормальная работа силовой установки и других систем. Выход ВС на значения aдоп наиболее вероятен на этапах взлёта, посадки, ухода на второй круг, в процессе торможения, когда необходимо создать потребную подъемную силу при малых скоростях полёта.
Для каждого ВС ограничения по параметрам СПКР индивидуальны. Ограничения параметров полёта гражданского самолёта являются наиболее простыми. Это объясняется его малой маневренностью и стандартными режимами полёта. Здесь решается главная задача – безопасность полета. На рис. 3.7 приведены законы ограничения по параметрам полёта Vпр и числу М для пассажирского самолёта Ил-86.
Рис. 3.7. Закон изменения максимально допустимой приборной скорости в условиях нормальной эксплуатации объекта Ил-86 Оригинальными являются ограничения параметров СПКР для вертолета. Наиболее характерными из них являются следующие [5]: - ограничения по высоте полёта Ндоп = ¦(m, t), (3.2) где m – масса вертолета; t – температура воздуха, °С. На высотах менее 10-25 м режим висения вертолета не рекомендуется из-за опасности отказов двигателей, когда может не хватить времени для разгона скорости косого движения для погашения вертикальной скорости. Условием безопасного снижения вертолета является алгоритм Vу ср = Vу доп – Vу тек, где Vу – скорость снижения; - ограничения по минимальной скорости, связанные с ограничениями по мощности двигателя на данной минимальной скорости косого полёта; - ограничения по максимальной скорости в связи со срывом потока воздуха при достижении критического значения числа Мна оконечностях лопастей из условия wR/a ³ Mкр, где w – скорость вращения лопастей; R – радиус лопасти; a – скорость звука; - ограничения по причине неопределенности границ (отсутствие экспериментальных данных, директивные границы); - ограничения по нормальной перегрузке ny = Yв/G, где Yв – результирующая аэродинамическая сила винта; G – сила веса. Этот параметр характеризует маневренность вертолета или способность создавать ускорение, отличное от ускорения свободного падения. Принцип действия СПКР На рис. 3.8 представлена обобщенная структурная схема СПКР в контуре управления ВС на предельных режимах полёта. В зависимости от режима, состояния ВС (блок 1) и атмосферы (блок 2) через преобразователи (блок 3) в вычислитель поступает информация о параметрах. После фильтрации (блок 4) первичных сигналов и их обработки на входе каналов индикации (блок 5), сигнализации (блок 6), автоматического увода (блок 7), с выхода вычислителей каналов на вход логического устройства (блок 8) подаются текущие и предельно допустимые значения ограничиваемых параметров. С выхода логического устройства сигналы поступают на средства индикации (блок 9), сигнализации (блок 10), автоматического увода (блок 11). Пилот (блок 12), получая информацию от средств индикации и сигнализации, через систему штурвального управления (блок 13) и сумматор (блок 14) может управлять ВС. Если он своевременно включен с помощью СПКР в контур управления, то обеспечивает удержание ВС на предельном режиме либо увод из него. В случае, когда пилот по каким-то причинам не включился в контур управления (пропуск информации, занят другими операциями и т.п.), то через логическое устройство включается в работу канал активного автоматического увода.
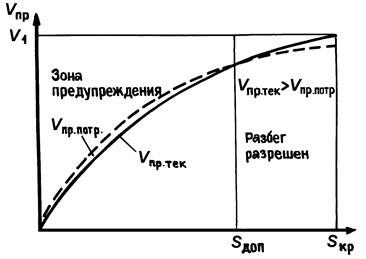
Рис. 3.8. Структурная схема СПКР На начальном этапе своего развития СПКР решали лишь задачи ограничения по нескольким наиболее значимым пилотажным параметрам и строились по автономному, так называемому канальному, принципу, без учёта естественной взаимосвязи ограничений, накладываемых на пилотажные параметры. Основными ограничиваемыми параметрами первых систем являлись угол атаки и вертикальная перегрузка. СПКР решали, в основном, задачу предупреждения сваливания самолёта и включали в себя указатели и сигнализаторы по отдельному параметру. Следует отметить, что эксплуатация уже первых вариантов СПКР убедительно подтвердила их высокую эффективность. Стали реальными полёты на предельных режимах с расширенными ограничениями по аэродинамическим параметрам. Однако в простейших СПКР отдельные ограничения на области безопасного полёта не учитывали взаимосвязь ограничиваемых параметров и назначались для случая самого неблагоприятного их сочетания. Это приводило к неполному использованию функциональных возможностей ВС, снижению эффекта по повышению безопасности полетов. Канальный принцип построения индикации и сигнализации ухудшал массогабаритные характеристики СПКР. Эргономически непригодной оказалась также индикация текущих и предельных значений ограничиваемых параметров на указателях, разнесенных друг от друга на приборной доске. Появилась необходимость разработки совмещенных индикаторов СПКР, например, типа УАП, УСИМ и др., на которых выводилась информация одновременно по нескольким пилотажным параметрам. Дальнейшим развитием СПКР явилась их целевая направленность на обеспечение безопасности на конкретных этапах полёта, начиная со взлёта и до посадки. Это определило целевую направленность традиционных СПКР на обеспечение безопасности на конкретных этапах полёта. В соответствии с функциональным назначением в составе приборного комплекса самолёта выделены: система контроля разбега (СКР), система предупреждения о выходе на опасные значения угла атаки и нормальной перегрузки (СОС), система предупреждения об опасной близости земли (СППЗ), система предупреждения о попадании в опасный сдвиг ветра (СППОС), система предупреждения столкновений самолётов (СПС). Проводятся разработки других автономных систем предупреждения об опасных режимах полёта, например, система предупреждения сдвига ветра (СПСВ). Основное назначение системы контроля разбега – предупреждение летных происшествий, связанных с превышением располагаемых дистанций взлётной полосы аэродрома, из-за принятия экипажем ошибочных решений на прерывание или продолжение взлёта или несвоевременного обнаружения экипажем опасных отклонений параметров разбега от их номинальных значений. Статистика лётных происшествий свидетельствует, что около 50 % аварий и катастроф на прерванном и около 10 – 15 % на продолженном взлёте связаны с указанными факторами. СКР на основе измерения параметров процесса разбега выдаёт экипажу сигнал предупреждения и командные сигналы на прерывание или продолжение взлёта в случае обнаружения опасного отклонения от его расчётного значения, введенного в систему перед полётом. Критерием формирования предупредительного сигнала может быть разность между допустимым значением ускорения самолёта aх доп f(Vпр) и его текущим значением aх: aх ср = aх доп f(Vпр) – aх. (3.3) Сигнал срабатывания СКР можно сформировать и как разность между пороговым (допустимым) значением воздушной скорости в функции пройденного по ВПП расстоянияS и измеренным текущим её значением: vср = vдоп f(s) – v. (3.4) Однако наиболее совершенной системой является та, в которой сигнал срабатывания формируется как разность между пороговым значением дистанции достижения Lдоп и вычисленным значением дистанции достижения заданной скорости Lp: Lср = Lдоп f (v) – Lp, (3.5) где Lp = f(а x, vп, v, s, vотр) – функция измеренных значений параметров процесса разбега; vп – путевая скорость, ax – продольное ускорение, v – воздушная скорость, s – пройденное по ВПП расстояние, vотр – расчетное значение отрыва самолёта от поверхности ВПП. Один из алгоритмов СКР представлен на рис. 3.9.
Рис. 3.9. Принцип организации сигнала срабатывания СКР при алгоритме vпр.тек > v потр, sтек £ sкр |
Последнее изменение этой страницы: 2019-10-03; Просмотров: 347; Нарушение авторского права страницы
 Наиболее часто встречаются такие текущие значения: аэродинамические углы атаки aи скольжения b; нормальная n y и продольная nx перегрузки; приборная скорость Vпр; число Маха – М; барометрическая высота Нбар; геометрическая высота Нг; угол наклона траектории полёта q; истинная скорость V, а также параметры, характеризующие сдвиг ветра в горизонтальной и вертикальной плоскостях; параметры режима разбега и других режимов полёта.
Наиболее часто встречаются такие текущие значения: аэродинамические углы атаки aи скольжения b; нормальная n y и продольная nx перегрузки; приборная скорость Vпр; число Маха – М; барометрическая высота Нбар; геометрическая высота Нг; угол наклона траектории полёта q; истинная скорость V, а также параметры, характеризующие сдвиг ветра в горизонтальной и вертикальной плоскостях; параметры режима разбега и других режимов полёта.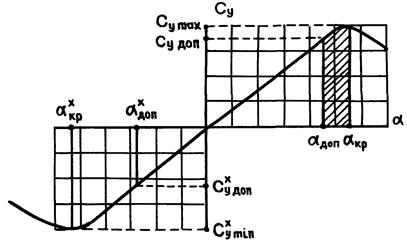
 Ограничения по перегрузке обычно касаются её вертикальной (нормальной) составляющей n y и, в основном, связаны с прочностными характеристиками ВС и комфортными условиями полета. Для лёгких маневренных самолетов ограничения по перегрузке определяют на основании её зависимости от числаМ (рис. 3.6). Аналогичным образом определяются ограничения и по всем другим пилотажным параметрам в процессе разработки и испытаний ВС.
Ограничения по перегрузке обычно касаются её вертикальной (нормальной) составляющей n y и, в основном, связаны с прочностными характеристиками ВС и комфортными условиями полета. Для лёгких маневренных самолетов ограничения по перегрузке определяют на основании её зависимости от числаМ (рис. 3.6). Аналогичным образом определяются ограничения и по всем другим пилотажным параметрам в процессе разработки и испытаний ВС.