
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Проектирование рычажных механизмов
Рычажные механизмы на практике получили широкое распространение. Реализация большинства технологии в народном хозяйстве осуществляется рычажным механизмами благодаря их достоинствам: - большая надежность; - технологичность изготовления и восстановления кинематических пар и звеньев; - способность преодолевать и передавать большие усилия …. Наиболее часто ставится задача проектирования кинематических схем шарнирного четырехзвенника, кулисного и кривошипно-шатунного механизмов. Ниже приведены методики их решения. Шарнирный четырехзвенник
Пусть даны: - расстояния между осями кривошипа и коромысла, - длина коромысла, - размах (крайние положения) качания коромысла, Найти: длины кривошипа Решение.
1. Приняв масштаб длин 2. Построим положения центров вращения кривошипа О и коромысла С. 3. Отложив от горизонтали в точке С углы
4. Соединим 5. Размеры кривошипа (ОА) и шатуна (АВ), на чертеже определяется по формулам:
6. Действительные их длины:
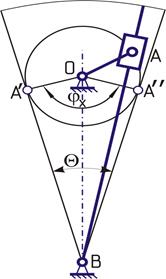
По найденным размерам построена кинематическая схема (ОАВС) механизма (рис. 1.5). Кулисный механизм Пусть даны:
- длина кривошипа, - коэффициент изменения скорости kV, - Найти межосевое расстояние Решение: 1. Угол размаха кулисы Q найдем по известной формуле:
2. Межосевое расстояния
3. Приняв масштаб длин
По найденным размерам строим кинематическую схему кулисного механизма. 4. Отметим положения центров вращения кривошипа О и кулисы В. 5. Через центр О проводим окружность радиусом (ОА) т.е. траекторию точки А звена 1. 6. От точки В к окружности проводим касательные линии - крайние положения кулисы. Определение скорости ведущего звена При проектировании механизма кроме коэффициента изменения средней скорости ведомого звена требуется обеспечить значение средней его скорости
где Т - время одного оборота кривошипа, сек.
где на кинематической схеме механизма, мм. Время Т одного оборота кривошипа найдем из пропорции
где
Подставив эти значения в пропорцию, получим:
|
Последнее изменение этой страницы: 2019-06-08; Просмотров: 238; Нарушение авторского права страницы

 .
. .
. 
 и шатуна
и шатуна  , обеспечивающие заданный размах коромысла.
, обеспечивающие заданный размах коромысла. найдем
найдем 
 и
и  найдем крайние положения коромысла 3, соответственно - крайние положения
найдем крайние положения коромысла 3, соответственно - крайние положения  и
и  ,
, 
 ; (1.2)
; (1.2)
 ,
,  .
. ; (1.3)
; (1.3) ; (1.4)
; (1.4) определяем на чертеже размеры длин кривошипа (ОА) и межосевого расстояния (ОВ)
определяем на чертеже размеры длин кривошипа (ОА) и межосевого расстояния (ОВ) .
. Средняя скорость ведомого звена:
Средняя скорость ведомого звена: 
 - ход ведомого звена, м.
- ход ведомого звена, м. ,
,  - расстояния между крайними положениями ведомого звена
- расстояния между крайними положениями ведомого звена - масштаб длин, м/мм.
- масштаб длин, м/мм. или
или 
 - частота вращения кривошипа,
- частота вращения кривошипа, 
 или
или  .
. или
или  (1.5)
(1.5)