|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Состав, назначение, решаемые задачи радионавигационных систем магистральных всСтр 1 из 15Следующая ⇒
Состав, назначение, решаемые задачи радионавигационных систем магистральных вс Радионавигационные системы определяют местоположение ЛА, используя для этой цели радиотехнические средства. Эти системы могут быть автономными, работающими на радиолокационном принципе, и неавтономными, использующими сигналы от радиомаяков К неавтономным радионавигационным системам относятся: - автоматический радиокомпас; - система радионавигации VOR; - дальномер DME; - система посадки ILS; - микроволновая система посадки MLS; - радиотехническая система ближней навигации; - спутниковая навигационная система; - радиолокационный ответчик УВД; - система предупреждения столкновений. Неавтономные радионавигационные системы различаются между собой по типу используемых ими радиомаяков. На магистральных пассажирских самолетах, как правило, устанавливают все типы систем, на других классах ЛА некоторые из них могут отсутствовать. К автономным радионавигационным системам относятся: - радиовысотомер; - доплеровский измеритель скорости и угла сноса; - метеонавигационный радиолокатор. Эти устройства не используют радиомаяки, а получают информацию из собственного радиосигнала, отраженного земной поверхностью или метеообразованиями. Радионавигационные системы классифицируются по следующим признакам: 1. Способ определения местоположения объекта: позиционные (угломерные, дальномерные, разностно-дальномерные, комбинированные), использующие счисление пути интегрированием скорости и ускорения; основанные на обзорно-сравнительных методах местоопределения; 2. Вид несущего информацию и непосредственно измеряемого системой параметра радиосигнала- амплитудные, частотные, фазовые и импульсно-фазовые; 3. Диапазон используемых радиоволн: от декакилометровых, применяемых в сверхдлинноволновых РНС, до оптических, используемых в лазерных системах местоопределения; 4. дальность действия систем : космические, глобальные, дальней и ближней навигации; 5. Место расположения опорных станций: системы наземного и космического базирования Назначение, решаемые задачи, состав и классификация радиотехнических
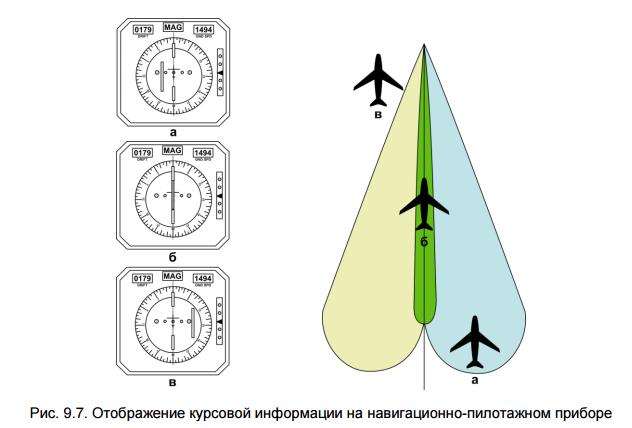
Канал измерения дальности Бортовое оборудование воздушного судна посылает запрос, от наземного оборудования получает ответ, по величине задержки ответа относительно запроса определяется дальность. Вопрос 8. Бортовое навигационно-посадочное устройство объединяет в себе два радиоприемника: курсовой и глиссадный. Курсовой радиоприемник принимает, усиливает и преобразует ВЧ-сигналы курсовых радиомаяков навигационных систем VOR и курсовых радиомаяков посадочных систем ILS и СП-50 в диапазоне частот 108…118 МГц. Выбор рабочей частоты радиомаяков VOR или ILS осуществляется в зависимости от радионавигационных устройств органами управления с пульта управления, комплексных пультов радиотехнических систем либо боковых панелей дисплеев PFD или MFD. При работе курсового приемника в режиме «ILS» от него на вход блока посадки поступает два сигнала с частотами 90 и 150 Гц. Разность амплитуд сигналов после их детектирования будет зависеть от положения ВС относительно равносигнальной линии курса и пропорциональна угловому отклонению ВС от оси ВПП в горизонтальной плоскости. Эта разность амплитуд в виде постоянного напряжения ΔUк подается на курсовую планку навигационно-пилотажного прибора и отклоняет ее (рис. 9.7). Положение курсовой планки на рис. 9.7, а характеризует нахождение самолета правее линии курса, на рис. 9.7, в – левее линии курса, на рис. 9.7, б – точно на курсе.
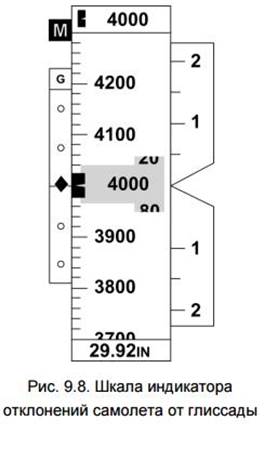
Вопрос 9. При работе глиссадного радиоприемника от него на вход блока посадки также поступает два сигнала с частотами 90 и 150 Гц. Разность амплитуд этих сигналов будет зависеть от положения ВС относи- тельно равносигнальной линии глиссады и пропорциональна угловому отклонению ВС от глиссады в вертикальной плоскости. Эта разность амплитуд в виде постоянного напряжения ΔUг подается на треугольный индекс глиссады навигационно-пилотажного прибора или ромбический индекс слева от шкалы барометрического высотомера (рис. 9.8) в системе Garmin G 1000 и пере- мещает их вдоль глиссадной шкалы.
10.Бортовая аппаратура навигации и посадки: принцип работы в режиме посадки по системе ILS (маркерный канал). Формирование сигналов в маркерном канале осуществляется путем излучения высокочастотных колебаний, модулированных по амплитуде и манипулированных определенным кодом в соответствии с местом расположения МРМ. В системе СП-50 при двухмаркерном варианте ВЧ-сигналы БМРМ и ДМРМ модулированы частотой 3000 Гц, но отличаются манипуляцией: точки в БМРМ и тире в ДМРМ. Поэтому звуковой генератор в зависимости от назначения МРМ создает одну из трех частот: F1=400, F2=1300 и F3=3000 Гц. Соответственно с манипулятора идет последовательность точек, либо последовательность чередующихся тире и точек, либо последовательность тире. Глубина модуляции составляет (95±4)%. Маркерные радиомаяки работают на частоте 75 МГц. Они излучают вертикально вверх кодированные сигналы с диаграммой направленности в виде конуса (факела). В момент пролета над радиомаяком сигналы принимаются на ЛА маркерным радиоприемником и поступают с его выхода на сигнальную лампочку и электрозвонок. Время индикации звуковой сигнализации зависит от высоты полета и скорости пролета ЛА над маяком. Пилот, наблюдая за характером горения лампочки и прослушивая код сигнала по звонку, судит о дальности до ВПП.
11) Бортовая аппаратура радиомаячной системы ILS: назначение, решаемые задачи, принцип работы, состав и размещение на ВС, основы эксплуатации. Заход на посадку по ILS. В инструментальную систему посадки ILS входит: -курсовой приемник -глиссадный приемник -маркерный приемник -указатели курса и глиссады
Дальномерные РСДН. В дальномерных РСДН, для определения расстояния до опорной станции, измеряется время задержки T сигнала на пути распространения от ОС до самолета, т. е. T=D/с, где С-скорость распространения радиоволн, а D-дальность до ОС. Излучение сигналов опорными станциями осуществляется в строго определенные моменты времени, известные на самолете, т. е. на самолете и на ОС должны быть эталоны времени. По эталону времени ОС задается момент излучения сигнала, а по эталону времени на самолете – отмечается момент приема этого сигнала. Но, из-за наличия расхождений эталонов времени на ОС и на самолете возможна ошибка в измерении дальности, поэтому измеренная дальность именуется как псевдодальность, а такой метод измерения – псевдодальномерным. Если эталон времени на самолете корректировать (например, по системе единого времени), то ошибка в измерении будет определяться уходом временной шкалы за интервал времени между коррекциями. Общее описание RAIM контролирует расчет GPS координат местоположения объекта, в случае их переопределения. То есть, в том случае когда доступно больше спутников, чем необходимо для определения позиции, полученные дополнительные псевдо измерения должны быть совместимы с рассчитанными координатами позиции. Значения полученные от псевдо измерения, которые существенно отличается от ожидаемого значения могут привести к ложному определению передающего сигнал спутника или иной проблемы нарушающей целостность сигнала (например, ионосферной дисперсии). RAIM Автономный контроль целостности (RAIM) обеспечивает целостность системы GPS мониторинга в авиационных приложениях. Для того чтобы GPS приемник мог осуществить RAIM-контроль или составить функцию ошибок(функция разности предполагаемых и наблюдаемых значений измерений),ему должно быть доступно как минимум пять спутников системы. RAIM имеет несколько способов реализации; один из них заключается в проверке совместимости рассчитанных координат положения объекта, при использовании всех возможных групп видимых спутников. Приемник выдает предупреждение пилоту, в случае если в результате проверки рассчитанные таким образом координаты не совместимы. Необходимым условием реализации метода RAIM в любом случае является наличие не менее 5 спутников видимых антенной GPS приемника; алгоритм RAIM, фактически, является статистическим методом. В связи с этим каждому проведенному тесту – заключению о согласованности полученных от разных групп спутников координат – отвечает определенная вероятность, которая является мерой надежности этого теста о выявления сбоя, когда тот случится. Эта вероятность характеризует целесообразность и надежность проведения данного теста, она зависит от геометрии видимого созвездия спутников и условий окружающей среды, в районе где находится GPS приемник. Целесообразность в данном случае является фактором прооизводительности того или иного алгоритма и характеризует каждый из существующих алгоритмов и методологий системы RAIM. Методы RAIM используются в системах GPS мониторинга и навигации. В качестве примера таких систем можно привести систему GPSMobile.
Основные задачи функции RAIM: – оценка качества принимаемых сигналов со спутником и выявление спутника, чья информация не должна быть использована (см. рис. 6.5); – определение порогов срабатывания по точности определения места ВС в зависимости в зависимости от типа операций, см. табл. 6.4.
Рис. 6.5. Оценка качества принимаемых сигналов На рис. 6.5 графически представлены линии положения от соответствующих номеров спутников. Место ВС определяется пересечением линий положений. В каждой точке пересечения линий положения определяются геодезические координаты (φ, λ) по умолчанию на эллипсоиде WGS-84, если не выбран соответствующий рефференц-эллипсоид. Из рис. 6.5 видно, что координаты, определяемые с использованием линия положения спутника №6, существенно отличается от остальных. В этой связи алгоритм RAIM не будет обрабатывать информацию этого спутника. Информация от пяти спутников образует 10 пересечений (рис. 6.6), т.е. 10 мест ВС. В дальнейшем компьютере по 10 местам вычисляется значение места ВС:
, где n количество i мест.
Рис. 6.6. Определение места ВС В дальнейшем определяется радиус разброса места ВС (R). Значение этого радиуса используется в качестве порога срабатывания RAIM в зависимости от выполняемой операции согласно табл. 6.4. Таблица 6.4 Пороги срабатывания RAIM Этап полета |
Значение допуска | ||||||||
| км | м. мили | ||||||||
| По маршруту | 3.7 | 2.0 | |||||||
| В районе аэродрома | 1.9 | 1.0 | |||||||
| Заход на посадку | 0.6 | 0.3 | |||||||
Необходимо отметить, что в связи с тем навигационные спутники постоянно перемещаются по орбитам, то линии положений всякий раз будут пресекаться под различными углами, т.е. геометрический фактор (PDOP) все время меняется, а, следовательно, значение R является величиной переменной во времени. В этой связи если планируется заход на посадку в режиме зональной навигации с использованием датчика GPS, то выполняется RAIM
GBAS
Наземная станция GBAS располагается на территории обслуживаемого этой станцией аэропорта или вблизи него. Станция контролирует сигналы основных созвездий и передает применимые в ее зоне обслу- живания корректировки псевдодальностей, параметры целостности и определяющие схему захода на посадку данные для воздушных судов в зоне аэродрома, используя всенаправленную передачу данных в ОВЧ- диапазоне (VDB) в пределах полосы частот 108,025–117,975 МГц. Согласно Приложению 10 GBAS обеспечивает точный заход на посадку по категории I и обслуживание по определению местоположения в зоне аэродрома.
Обслуживание GBAS для выполнения точного захода на посадку обеспечивает наведение с устранением отклонений по горизонтали и вертикали на конечном участке захода на посадку.
В состав наземного оборудования GBAS входят антенны для приема спутниковых сигналов, а также электронное оборудование, которое может быть установлено в любом подходящем для этой цели здании аэропорта. В отличие от ILS и микроволновой системы посадки (MLS), расположение антенны довольно независимо от конфигурации ВПП, однако требует тщательной оценки местных источников помех, препятствий для прохождения сигнала, защитных зон в аэропорту и многопутевого распространения.
В пределах зоны действия входящей в ее состав VDB одна наземная установка GBAS может обес- печить управление для не более чем 49 схем захода на посадку.
Вопрос 21.
К настоящему времени зарубежными и отечественными фирмами разработано достаточно большое количество авиационных приемников спутниковой навигации, которые условно можно разделить: а) по возможности использования сигналов ГСНС: бортовое оборудование системы GPS, ГЛОНАСС и ГЛОНАСС/GPS; б) по функциям и структурному построению: приемовычислители; приемоиндикаторы; комплексированные. Согласно требованиям технического стандарта TSO-С129, приемники СНС подразделяются на три класса: А, B и С. Класс А – оборудование, сочетающее в себе навигационный датчик, определяющий трехмерные координаты ВС (φ, λ, h), время (UTC) и вектор движения W, а также навигационный вычислитель, решающий навигационные задачи. Оборудование класса А устанавливается на ВС, не имеющих бортовых навигационных комплексов. В приемник встраивается устройство, обладающее функцией автономного контроля целостности (RAIM). Оборудование имеет подклассы А1 и А2. Оборудование подкласса А1 одобрено для маршрутного полета, полета в зоне аэродрома и для неточного захода на посадку. Оборудование подкласса А2 одобрено только для маршрутного полета и полета в зоне аэродрома.
Класс В – оборудование, состоящее из навигационного датчика и устройства передачи данных о трехмерных координатах (φ, λ, h), о времени (UTC) и векторе движения W в бортовые навигационные комплексы (КСПНО, FMS). Обеспечивает решение всех навигационных и сервисных задач на более высоком уровне, чем класс А. 114 Оборудование имеет подклассы В1, В2, В3, В4. Оборудование подкласса В1 позволяет выполнять маршрутный полет, полет в зоне аэродрома и неточный заход не посадку. Оборудование подкласса В2 позволяет выполнять только полет по маршруту и в зоне аэродрома. В подклассах В1 и В2 предусмотрен контроль целостности RAIM. Оборудование подкласса В3 позволяет выполнять маршрутный полет, полет в зоне аэродрома и неточный заход на посадку, оборудование подкласса В4 – только полет по маршруту и в зоне аэродрома. В оборудовании подклассов В3 и В4 датчики объединены, чтобы на уровне ВС обеспечить контроль целостности, эквивалентный тому, который обеспечивает RAIM. Класс С – оборудование класса С является датчиком для бортовых навигационных комплексов, обеспечивающих автоматический и директорный режимы выполнения полета, т. е. оборудование класса С «встроено» в бортовой навигационный комплекс типа КСПНО (FMS) и является его составной частью. Считается более надежным, чем классы А и В, рекомендовано для установки на пассажирских ВС и ВС транспортной дальней авиации. Приемное оборудование класса С, как правило, не имеет своих органов управления и индикации. Управление осуществляется через многофункциональные пульты типа КПРТС, MCDV системы КСПНО (FMS), а индикация – через многофункциональные дисплеи (MFD). Примером оборудования класса С является пилотажно-навигационный комплекс Garmin G 1000, установленный на самолете DA 42. Правая панель дисплея для управления встроенной системой спутниковой навигации GPS приведена на рис. 3.14. Оборудование класса С взаимодействует не только с навигационным оборудованием ВС как датчик параметров полета (φ, λ, h, UTC, W), но и используется в системах TCAS, ADS, ответчиков режима «S» и т. п.
Спутниковые радионавигационные системы представляют собой всепогодные системы космического базирования и позволяют в глобальных масштабах определять текущие местоположения подвижных объектов и их скорость, а как же осуществлять точную координацию времени. В соответствии с концепцией ICAO спутниковые навигационные системы в ближайшее время становятся одним из основных средств навигации в авиации [25]. Принцип действия систем заключается в том, что навигационные спутники излучают специальные электромагнитные сигналы. Аппаратура потребителей, расположенная на объектах, находящихся на поверхности Земли или околоземном пространстве принимает информацию, заложенную в эти сигналы, измеряет расстояния до спутников, доплеровскую частоту, время и после специальной обработки вырабатывает данные о местоположении, скорости и времени объекта. Спутниковую радионавигационную систему можно рассматривать как высокотехнологичную информационную систему, состоящую из пяти основных сегментов рис. 2.4. Наземный управляющий сегмент включает в себя центр управления космическим сегментом, станции слежения за навигационными спутниками (радиолокационные и оптические), аппаратуру контроля состояния навигационных спутников. Управляющий сегмент решает задачи определения, прогнозирования и уточнения параметров движения навигационных спутников, формирования и передачи в бортовую аппаратуру спутников цифровой информации, а также ряд контрольных и профилактических функций.
Принцип работы системы GPS
Global Positioning System (GPS) – это спутниковая навигационная система, состоящая из работающих в единой сети 24 спутников, находящихся на 6 орбитах высотой около 20 200 км над поверхностью Земли. Спутники постоянно движутся со скоростью около 3 км/сек, совершая два полных оборота вокруг планеты менее, чем за 24 часа.
Спутниковая система GPS известна также под другим названием – NAVSTAR. Очевидно, рассказ о GPS был бы неполным без сведений о самих спутниках: Первый GPS-спутник был запущен в феврале 1978 г. Каждый спутник весит более 900 кг и имеет размер около 5 м (с раскрытыми солнечными батареями). Мощность радиопередатчика – не более 50 ватт. Каждый спутник передает сигналы на 3-х частотах. Гражданские GPS-приемники используют частоту “L1”, равную 1575.42 МГц.
Каждый спутник рассчитан на работу примерно в течение 10 лет
Орбиты спутников располагаются примерно между 60 градусами северной и южной широты. Этим достигается то, что сигнал, хотя бы от некоторых спутников может приниматься повсеместно в любое время. Даже на полюсах можно “увидеть” спутники – правда, они не будут пролетать прямо над головой. Это, конечно, повлияет на геометрию и , следовательно, на точность – но лишь немного.
В основе работы системы GPS лежит:
спутниковая трилатерация (на ней базируется работа системы);
спутниковая дальнометрия (измерение расстояний до спутников);
точная временная привязка (высокоточная синхронизация отсчета времени в системе спутники-приемники);
точное положение спутников в космосе;
коррекция ошибок, вносимых задержкой радиосигнала спутника в ионосфере и тропосфере.
Спутниковая трилатерация предполагает, что точные координаты любой точки на поверхности Земли могут быть вычислены путем измерений расстояний от группы спутников до искомой точки, если их положение в космосе известно. В этом случае спутники являются пунктами с известными координатами. Предположим, что расстояние от одного спутника известно, и вокруг него можно описать сферу заданного радиуса. Если известно также расстояние до второго спутника, то определяемое местоположение будет расположено где-то в круге, задаваемом пересечением двух сфер. Третий спутник определяет две точки на окружности. Четвертый спутник позволяет окончательно точно определить местоположение точки. Таким образом, зная расстояние до четырех спутников, можно вычислить координаты определяемой точки.
Расстояние до спутников определяется по измерениям времени прохождения радиосигнала от космического аппарата до приемника, умноженным на скорость света. Для того чтобы определить время распространения сигнала, нам необходимо знать, когда он был передан со спутника. Для этого на спутнике и в приемнике одновременно генерируется одинаковый псевдослучайный код. Каждый спутник системы GPS передает два радиосигнала: на частоте L1=1575,42 МГц и L2=1227,60 МГц. Сигнал L1 имеет два дальномерных кода с псевдослучайным шумом (PRN) P-код и C/A-код. «Точный», или P-код, может быть зашифрован для военных целей. «Грубый», или C/A-код, не зашифрован. Сигнал частоты L2 модулируется только с P-кодом.
Какую же информацию передает GPS-спутник? Его сигнал содержит так называемый “псевдослучайный код” (PRN pseudo-random code), эфимерис (ephimeris) и альманах (almanach). Псевдослучайный код служит для идентификации передающего спутника. Все они пронумерованы от 1 до 32 и этот номер показывается на экране GPS-приемника во время его работы. Почему же количество PRN-номеров больше, чем число спутников (24)? Это облегчает обслуживание GPS-сети: новый спутник может быть запущен, проверен и введен в эксплуатацию еще до того, как старый выйдет из строя. Такому спутнику просто будет присвоен новый номер ( от 1 до 32). Данные эфимериса, постоянно передаваемые каждым спутником, содержат такую важную информацию, как состояние спутника ( рабочее или нерабочее), текущая дата и время. Без этого Ваш GPS-приемник не знал бы, в частности, какой сегодня день и сколько сейчас времени. Помимо этого, как мы увидим далее, эта часть сигнала крайне важна для определения местоположения. Данные альманаха говорят о том, где в течение дня должны находиться все GPS-спутники. Каждый из них передает альманах, содержащий параметры своей орбиты, а также всех других спутников системы.
Как видно из вышесказанного, вычисления напрямую зависят от точности хода часов на спутниках и в приемниках. Код должен генерироваться на спутнике и в приемнике строго в одно и то же время. На спутниках установлены атомные часы, имеющие точность около одной наносекунды. Однако это решение является слишком дорогим, чтобы использовать его в приемниках GPS. Поэтому для устранения ошибок хода часов приемника используются результаты измерения сигналов от четвертого спутника. Их можно использовать для устранения ошибок, которые возникают, если часы на спутнике и в приемнике не синхронизированы
Отсчет высоты
Для определения высоты могут использоваться также GPS-приёмники. Принцип действия основан на одновременном измерении расстояния до нескольких (как правило — от четырёх до шести) вещающих спутников, находящихся на известных и специально корректируемых орбитах. На основании математических вычислений прибор определяет точку в пространстве — координаты φ, λ — широту и долготу места на модели поверхности Земли, а также высоту Н относительно среднего уровня моря модели (наиболее распространённая модель поверхности земли WGS84). Минимальное число спутников, необходимое для расчёта высоты, равно трём. Только координат — двум. Для определения времени достаточно сигнала одного спутника. Большее число спутников позволяет увеличивать точность вычисления параметров. С точки зрения истинности отображения координат имеет преимущество как перед барометрическими, так и перед радиотехническими высотомерами, так как не зависит ни от атмосферного давления, ни от измерения расстояния до физического рельефа местности.
Вопрос 22.
Метеонавигационные РЛС предназначены для обнаружения и указания экипажу углового положения (азимута), дальности и степени опасности гидрометеорологических образований (зон активной грозовой деятельности и кучевой облачности с повышенной турбулентностью), положения ВС относительно наземных ориентиров. Информация от метеонавигационной РЛС отображается на электроннолучевом индикаторе в кабине экипажа. Современные метеонавигационные РЛС предусматривают выдачу информации в навигационный комплекс на многофункциональные электронные индикаторы. Формирование навигационной информации в метеонавигационных РЛС происходит следующим образом. Антенна РЛС изучает зондирующий импульс в направлении объекта. Отраженный сигнал принимается антенной и поступает в приемник. Положение наземных ориентиров и гидрометеообразований относительно ВС определяется по результатам измеренной дальности и азимута отражающего объекта, а характер последнего – по интенсивности отраженного сигнала. Дальность Д определяется через длительность временного интервала С t 2Д Д = между моментами излучения зондирующего импульса и моментом приема отраженного сигнала: 2 Д tДС = , где Д – расстояние, км; tд – время, с; С – скорость света, С = 300 000 км/с. Время tд измеряется по расстоянию между началом развертки на экране и отметкой цели. Азимут отражающего наземного или воздушного объекта определяется благодаря узкой диаграмме направленности антенны. Об азимуте объекта судят по угловому положению оси направленной антенны в момент приема отраженного сигнала. Точность измерения дальности и азимута характеризуется разрешающей способностью по дальности и азимуту, которые зависят соответственно от длительности импульса, формируемого передатчиком, и угла раствора диаграммы направленности антенны. Чем меньше длительность импульса и угол раствора диаграммы направленности антенны, тем лучше разрешающая способность и точность измерения по дальности и азимуту. Антенна сканирует объекты (наземные или метеообъекты), в пределах зоны обзора по азимуту (±60…100°). Как правило, синхронно с движением антенны перемещается линия развертки на экране индикатора. Курсовой угол цели отсчитывается по отклонению линии развертки, на которой появилась отметка цели, от положения, соответствующего продольной оси ВС. Характер отражающего объекта, в том числе и степень опасности гидрометеообразований, определяется по яркости отметки цели.
В зависимости от предназначения современные РЛС могут эксплуатироваться в режимах «ГОТОВНОСТЬ», «ЗЕМЛЯ», «МЕТЕО», «КОНТУР», а также во вспомогательном режиме «КОНТРОЛЬ». В более ранних разработках бортовых РЛС использовался режим «СНОС».
Вопрос 23.
Состав типовой МНРЛС
В состав типовой МНРЛС входят 1 или 2 приемопередатчика (если 2, то с волновым переключателем), антенный блок, волноводный тракт и пульт управления. Если на борту есть система индикации, для вывода метеоинформации используются ее индикаторы. Для этой цели в приемопередатчике предусматривается стандартный цифровой выход. При отсутствии системы индикации в состав метеорадиолокатора включается свой экранный индикатор.
Устанавливается под радиопрозрачным обтекателем в носовом отсеке. Он состоит из волноводно-щелевой антенной решетки и электропривода с редуктором (рис.20.1). Антенная решетка сканирует влево-вправо от направления полета в диапазоне ±90°, скорость сканирования не менее 15 раз в минуту. В диапазоне сканирования метеолокатор испускает множество отдельных радиолучей (до 1024), каждый луч разбивается при приеме на множество расположенных друг за другом точек (типовое значение 256 точек, максимальное 512) и для каждой точки измеряется уровень отраженного сигнала, который свидетельствует о наличии и плотности облаков и о турбулентности.
Приемопередатчик обрабатывает полученную информацию и выдает результаты измерений турбулентности в систему индикации. Выдаваемая информация масштабируется в зависимости от установленного на пульте управления диапазона дальности. На экране индикатора уровни отраженного сигнала изображаются точками разного цвета, обычно по мере увеличения уровня отраженного сигнала цвета располагают так: черный, зеленый, желтый, красный. Для турбулентности предусмотрен коричневый цвет, для сильной турбулентности пурпурный. В результате точки создают на экране очертания метеообразований, расположенных в направлении полета. Как можно видеть на рис.20.2, на индикаторе видны очертания облачности, находящейся прямо по курсу полета. Более темные (красные) зоны соответствуют более опасным метеообразованиям.
При эволюциях ЛА метеорадиолокатор стабилизирует луч антенны. Для этого он принимает информацию по углам крена и тангажа от ИНС.
Чтобы ускорить обзор пилот может с пульта управления уменьшить диапазон сканирования до ±45°. Также он может задавать угол наклона антенны в пределах ±15° градусов от горизонтальной оси ЛА. Это позволяет отстроиться от помех и повысить четкость изображения, рассматривать вертикальную структуру облачности, а при наклоне антенны вниз, к земле – использовать МНРЛС для обзора рельефа земной поверхности в целях навигации.
При высоте полета 12000 м МНРЛС позволяет обнаружить грозовые образования и города на расстоянии до 550 км.
Вопрос 24.
Для получения изображения местности на экране МФИ антенна в режиме «ЗЕМЛЯ» имеет широкий веерный луч (30°) в вертикальной плоскости и узкий луч (3°) в горизонтальной плоскости (рис. 10.2). 
Рис. 10.2. Диаграмма направленности антенны РЛС в режиме «ЗЕМЛЯ» При работе РЛС в режиме «ЗЕМЛЯ» обеспечивается получение на индикаторе в полярных координатах (азимут – дальность) непрерывной радиолокационной карты земной поверхности в пределах азимутальных углов ±60° впереди самолета. Экран индикатора имеет время после свечения несколько большее времени цикла качания антенны, что позволяет наблюдать общую картину просматриваемой местности. Изображение местности на экране индикатора в режиме «ЗЕМЛЯ» получается в результате различных значений эффективной отражающей поверхности наземных объектов, что приводит к различию амплитуд отраженных сигналов, поступающих на вход приемника РЛС. В свою очередь, различие амплитуд сигналов вызывает различную яркость свечения отдельных элементов экрана, что позволяет судить о характере облучаемых объектов. В режиме «ЗЕМЛЯ» на экране зеленым цветом отображается фон земной поверхности, красным – сигналы от радиолокационно-контрастных целей (города, промышленные объекты), черным (фон экрана) – отражения от водных поверхностей и зоны радио тени.
Режим работы «МЕТЕО» В режиме «МЕТЕО» антенна РЛС имеет узкую (карандашную) 3…4° диаграмму направленности в вертикальной и горизонтальной плоскостях (рис. 10.3). При работе РЛС в этом режиме обеспечивается получение на экране МФИ в полярных координатах (азимут – дальность) радиолокационного изображения воздушной обстановки в пространстве, ограниченном азимутальными углами ±60° относительно строительной оси самолета и углами места ±1,5…2° относительно плоскости горизонта

Рис. 10.3. Диаграмма направленности антенны РЛС в режиме «МЕТЕО»
Для того, чтобы сектор обзора не изменял своего положения в пространстве при кренах и тангаже самолета, что особенно важно при обходе грозовых зон, ось диаграммы направленности антенны гиростабилизирована. При необходимости обзора пространства под другими углами места, диаграмма направленности антенны может быть наклонена вручную относительно плоскости на угол ±10°. В зависимости от степени опасности метеоявления отображаются на экране различным цветом (прил., рис. 7): 1. Зеленый – соответствует осадкам с интенсивностью 0,6…4,0 мм/ч. 2. Желтый – соответствует осадкам с интенсивностью 4,0…12,0 мм/ч. 3. Красный – соответствует осадкам с интенсивностью более 12,0 мм/ч. Все управление РЛС в этом режиме осуществляется переключателями длительностей развертки и наклона антенны.
Режим работы «КОНТУР» В этом режиме радиолокатор позволяет выявить внутри отражений от грозовых областей и кучево-дождевых облачностей наиболее опасные для полета зоны, состоящие из водных капель большого диаметра. За счет специального построения схемы видеоусилителя указанные участки представляются на экране индикатора в виде темно-красных (темных) областей, расположенных внутри ярких отметок от обнаруженных грозовых зон (прил., рис. 8). Отображение в режиме «КОНТУР» отличается включением в РЛС временной автоматической регулировки усиления, подавляющей все принимаемые сигналы, амплитуда которых превосходит определенный фиксированный уровень, что дает возможность на дальности до 50 км оценить степень опасности метеообразования вне зависимости от дальности до него. В остальном работа радиолокатора в режиме «КОНТУР» аналогична работе в режиме «МЕТЕО».
Вопрос 25.
4.1.1 В режиме "Метео" МНРЛ выполняет следующие задачи:
● обнаружение и оценку опасности гидрометеообразований, определение их пеленга и дальности;
● обнаружение зон опасной турбулентности, определение их пеленга и дальности;
- выдачу сигналов предупреждения при обнаружении впереди самолета опасных гидрометеообразований по критериям их интенсивности и турбулентности;
● определение вертикального профиля гидрометеообразований;
● обнаружение зон опасных сдвигов ветра при взлете и заходе на посадку;
- выдачу сигнала при обнаружении опасного сдвига ветра впереди самолета;
● автоматическую установку наклона диаграммы направленности антенны при изменении высоты полета и установленного диапазона дальности;
● установку наклона диаграммы направленности антенны с помощью органов управления на пульте МНРЛ;
● компенсацию зависимости величины сигнала, отраженного от гидрометеообразований, от дальности до них;
● компенсацию затухания сигнала в гидрометеообразованиях;
● подавление помех от земной поверхности при обнаружении зон сдвига ветра;
● стабилизацию пространственного положения зоны обзора МНРЛ при эволюциях самолета.
4.1.2 Дальность обнаружения гидрометеообразований с отражаемостью 40 дБZ (соответствует дождю с интенсивностью 12 мм/час) составляет не менее 550 км (при высоте полета не менее 10000 м);
4.1.3 Для оценки степени опасности гидрометеообразований они отображаются на экране СЭИ в соответствии с цветовой палитрой, рекомендованной ARINC 708.
4.1.4 Наклон антенны изменяется автоматически при изменении масштаба дальности и высоты полета. Предусмотрено ручное управление наклоном антенны.
4.1.5 В режиме «Метео» МНРЛ производит обнаружение областей турбулентности (зон движущихся потоков с отклонением от средней радиальной скорости не менее 2,5 м/с).
4.1.6 Дальность обнаружения зон турбулентности в метеообразованиях с отражаемостью 20 дБZ и более составляет не менее 70 км.
4.1.7 Области турбулентности отображаются на экране СЭИ цветом, предусмотренным ARINC 708.
4.1.8 Если информация от МНРЛ на экран СЭИ не выводится, то МНРЛ формирует и передает в БРЭО сигнал опасности в следующих случаях:
а) при обнаружении метеообразований с отражаемостью 40 дБZ и более в секторе ±15°относительно строительной оси самолета на дальности до 100 км – сигнал «Опасное метео»;
б) при обнаружении зон турбулентности в метеообразованиях в секторе ±15° относительно строительной оси самолета на дальности до 70 км – сигнал «Опасная турбулентность».
4.1.9 В режиме «Метео» предусмотрена возможность определения вертикального профиля метеообразования. Азимутальное направление, в котором производится измерение вертикального профиля, выбирается оператором.
В режиме обнаружения сдвига ветра МНРЛ выдает сигналы оповещения о сдвиге ветра трех уровней:
а) уровень 3 (сигнал предупреждающего оповещения);
б) уровень 2 (сигнал предостерегающего оповещения);
в) уровень 1 (сигнал сообщения)
Состав, назначение, решаемые задачи радионавигационных систем магистральных вс
Радионавигационные системы определяют местоположение ЛА, используя для этой цели радиотехнические средства. Эти системы могут быть автономными, работающими на радиолокационном принципе, и неавтономными, использующими сигналы от радиомаяков
К неавтономным радионавигационным системам относятся:
- автоматический радиокомпас;
- система радионавигации VOR;
- дальномер DME;
- система посадки ILS;
- микроволновая система посадки MLS;
- радиотехническая система ближней навигации;
- спутниковая навигационная система;
- радиолокационный ответчик УВД;
- система предупреждения столкновений.
Неавтономные радионавигационные системы различаются между собой по типу используемых ими радиомаяков. На магистральных пассажирских самолетах, как правило, устанавливают все типы систем, на других классах ЛА некоторые из них могут отсутствовать.
К автономным радионавигационным системам относятся:
- радиовысотомер;
- доплеровский измеритель скорости и угла сноса;
- метеонавигационный радиолокатор.
Эти устройства не используют радиомаяки, а получают информацию из собственного радиосигнала, отраженного земной поверхностью или метеообразованиями.
Радионавигационные системы классифицируются по следующим признакам:
1. Способ определения местоположения объекта: позиционные (угломерные, дальномерные, разностно-дальномерные, комбинированные), использующие счисление пути интегрированием скорости и ускорения; основанные на обзорно-сравнительных методах местоопределения;
2. Вид несущего информацию и непосредственно измеряемого системой параметра радиосигнала- амплитудные, частотные, фазовые и импульсно-фазовые;
3. Диапазон используемых радиоволн: от декакилометровых, применяемых в сверхдлинноволновых РНС, до оптических, используемых в лазерных системах местоопределения;
4. дальность действия систем : космические, глобальные, дальней и ближней навигации;
5. Место расположения опорных станций: системы наземного и космического базирования
Последнее изменение этой страницы: 2019-06-10; Просмотров: 1283; Нарушение авторского права страницы