
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
РАЗДЕЛ 1. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Тема 1.1. Системы автоматического управления И следящие системы 1. Классификация систем автоматического управления 2. Законы автоматического управления. 3. Системы автоматизированного управления производством
1. Существует большое разнообразие систем автоматического управления. Чтобы как-то разобраться в этом многообразии проводится классификация САУ. Существует несколько признаков, по которым проводится классификация САУ. На рисунке 4 приведена примерная классификация САУ.
Рис. 4. Классификация САУ
Основные признаки классификации САУ: По назначению, то есть характеру изменения задающего воздействия, различают: ü системы автоматической стабилизации; ü системы программного управления; ü следящие системы. Стабилизирующая АСУ – система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянным: x(t) ≈ xз = const (1.1)
Знак ≈ означает, что управляемая величина поддерживается на заданном уровне с некоторой ошибкой. Стабилизирующие АСУ самые распространенные в промышленной автоматике. Их применяют для стабилизации различных физических величин, характеризующих состояние технологических объектов. Программная АСУ – система, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией времени:
x(t) ≈ xз(t) = fп(t) (1.2)
Следящая АСУ – система, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее неизвестной функцией времени:
x(t) ≈ xз(t) = fс(t) (1.3)
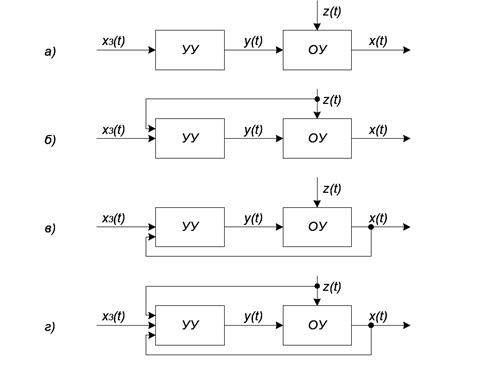
В стабилизирующих, программных и следящих АСУ цель управления заключается в обеспечении равенства или близости управляемой величины x(t) к ее заданному значению xз(t). Такое управление, осуществляемое с целью поддержания x(t) ≈ xз(t), называется регулированием. Управляющее устройство, осуществляющее регулирование, называется регулятором, а сама система – системой регулирования. По принципу управления различают: ü Системы с управлением по разомкнутому циклу; ü Системы с управлением по замкнутому циклу; ü Системы комбинированного управления. Разомкнутая АСУ – система, в которой не осуществляется контроль управляемой величины, т. е. входными воздействиями ее управляющего устройства являются только внешние (задающее и возмущающее) воздействия. Разомкнутые АСУ можно разделить в свою очередь на два типа: - осуществляющие управление в соответствии с изменением только задающего воздействия (Рис. 5, а); - осуществляющие управление в соответствии с изменением и задающего и возмущающего воздействий (Рис. 5, б). Алгоритм управления разомкнутой системы первого типа имеет вид: y(t) = Ay [ xз(t)] (1.4)
Чаще всего оператор Аy устанавливает пропорциональную связь между задающим воздействием xз(t) и управляющим воздействием y(t), а сама система в этом случае осуществляет программное управление. Системы первого типа работают эффективно лишь при условии, если влияние возмущений на управляемую величину невелико и все элементы разомкнутой цепи обладают достаточно стабильными характеристиками.
Рис. 5. Функциональные схемы САУ с разомкнутой (а, б), замкнутой (в) и комбинированной (г) цепями воздействий В системах управления по возмущению (Рис. 5, б) управляющее воздействие зависит от возмущающего и задающего воздействий:
y(t) = Ay [xз(t), z(t)] (1.5)
В большинстве случаев разомкнутые системы управления по возмущению выполняют функции стабилизации управляемой величины. Преимущество разомкнутых систем управления по возмущению – их быстродействие: они компенсируют влияние возмущения еще до того, как оно проявится на выходе объекта. Но применимы эти системы лишь в том случае, если на управляемую величину действуют одно или два возмущения и есть возможность измерения этих возмущений. Поэтому если эти величины действуют на объект как возмущения, то обычно стремятся стабилизировать их при помощи дополнительной системы или ввести в основную систему управления данным объектом сигнал, пропорциональный такому воздействию. Замкнутая АСУ (АСУ с обратной связью) – система, в которой входными воздействиями ее управляющего устройства являются как внешнее (задающее), так и внутреннее (контрольное) воздействия. Управляющее воздействие в замкнутой системе (Рисунок 5, в) формируется в большинстве случаев в зависимости от величины и знака отклонения истинного значения управляемой величины от ее заданного значения: y(t) = Ay [ε (t)], (1.6)
где ε (t) = xз(t) - x (t) – сигнал ошибки (сигнал рассогласования).
Замкнутую систему называют часто системой управления по отклонению . В замкнутой системе контролируется непосредственно управляемая величина и тем самым при выработке управляющего воздействия учитывается действие всех возмущений, влияющих на управляемую величину. В этом заключается преимущество замкнутых систем. Комбинированная АСУ – система, в которой входными воздействиями ее управляющего устройства являются как внешние (задающее и возмущающее), так и внутреннее (контрольное) воздействия. В комбинированных системах (Рисунок 5, г) имеется две цепи воздействий – по заданию и по возмущению, и управляющее воздействие формируется согласно оператору.
y(t) = Aз [ε (t)] + Aв [z(t)] (1.7) Эффективность работы комбинированной АСУ всегда больше, чем у порознь функционирующих замкнутой или разомкнутой систем. По характеру используемых для управления сигналов различают: 1. непрерывные или аналоговые САУ; 2. дискретные САУ, из которых выделяет: ü импульсные системы автоматического управления; ü релейные системы автоматического управления; ü цифровые системы автоматического управления. Непрерывная АСУ – АСУ, в которой действуют непрерывные (аналоговые), определенные в каждый момент времени сигналы. Дискретная АСУ - АСУ, в которой действует хотя бы один дискретный, определенный только в некоторые моменты времени сигнал. К дискретным АСУ относятся, например, АСУ, имеющие в своем составе цифровые вычислительные устройства: микропроцессоры, контроллеры, электронные вычислительные машины. По характеру используемой информации об условиях работы различают: 1. системы автоматического управления с жестким законом управления и структурой; 2. системы автоматического управления с изменяемыми структурой и законом управления, к которым относятся:
ü системы автоматической настройки; ü самообучающие системы; ü самоорганизующие системы. По характеру математических соотношений различают: 1. линейные системы автоматического управления, для которых справедлив принцип суперпозиции; 2. нелинейные системы автоматического управления, для которых принцип суперпозиции в общем случае не справедлив. Линейные АСУ – АСУ, все элементы которых описываются линейными дифференциальными и/или алгебраическими уравнениями. Нелинейные АСУ – АСУ, хотя бы один элемент которой описывается нелинейными дифференциальными и/или алгебраическими уравнениями. Как линейные, так и нелинейные САУ могут подразделяться на аналоговые, дискретные и дискретно-непрерывные, стационарные и нестационарные. При этом стационарной системой называется САУ, параметры элементов которой не зависят от времени работы системы. Для нестационарной САУ это условие не выполняется. Стационарные и нестационарные САУ могут быть с сосредоточенными и распределенными параметрами.
По количеству выходных координат объекта управления различают: 1. одномерные системы автоматического управления; 2. многомерные системы автоматического управления.
Последние делятся на системы связанного и несвязанного управления. В системах связанного управления отдельные управляющие устройства соединены между собой внешними связями. Входящая в состав многомерной системы отдельная САУ называется автономной, если управляемая ею выходная переменная не зависит от значения остальных управляемых величин. По способу выработки управляющего воздействия замкнутые АСУ разделяют на: 1. беспоисковые; 2. поисковые. Беспоисковая АСУ – АСУ, в которой управляющее воздействие вырабатывается в результате сравнения истинного значения управляемой величины с заданным значением. Такие системы применяют для управления сравнительно несложными объектами, характеристики которых достаточно хорошо изучены и для которых заранее известно в каком направлении и на сколько нужно изменить управляющее воздействие при определенном отклонении управляемой величины от заданного значения. Поисковая АСУ – АСУ, в которой управляющее воздействие формируется с помощью пробных управляющих воздействий и путем анализа результатов этих пробных воздействий. Такую процедуру поиска правильного управляющего воздействия приходится применять в тех случаях, когда характеристики объекта управления меняются или известны не полностью; например, известен вид зависимости управляемой величины от управляющего воздействия, но неизвестны числовые значения параметров этой зависимости. Поэтому поисковые системы называют еще системами с неполной информацией. Наиболее часто принцип автоматического поиска управляющих воздействий применяют для управления объектами, характеристики которых имеют экстремальный характер. Целью управления является отыскание и поддержание управляющих воздействий, соответствующих экстремальному значению управляемой величины. Такие поисковые системы называют экстремальными (оптимальными) системами. Особый класс АСУ образуют системы, которые способны автоматически приспосабливаться к изменению внешних условий и свойств объекта управления, обеспечивая при этом необходимое качество управления путем изменения структуры и параметров управляющего устройства. Они называются адаптивными ( самоприспосабливающимися) системами. В составе адаптивной АСУ имеется дополнительное автоматическое устройство, которое меняет алгоритм управления основного управляющего устройства таким образом, чтобы АСУ в целом осуществляла заданный алгоритм функционирования, который предписывает обычно максимизацию показателя качества. Поэтому адаптивные АСУ являются еще и оптимальными. По степени зависимости управляемой величины в установившемся режиме от величины возмущающего воздействия АСУ делят на: 1. статические; 2. астатические. Статическая АСУ – АСУ, в которой имеется зависимость управляемой величины в установившемся режиме от величины возмущающего воздействия. Астатическая АСУ – АСУ, в которой отсутствует зависимость управляемой величины в установившемся режиме от величины возмущающего воздействия. В зависимости от принадлежности источника энергии, при помощи которого создается управляющее воздействие, различают АСУ: 1. прямого действия; 2. непрямого действия. АСУ прямого действия – АСУ, в которой управляющее воздействие создается при помощи энергии объекта управления. К ним относятся простейшие системы стабилизации (уровня, расхода, давления и т. п.), в которых воспринимающий элемент через рычажную систему непосредственно действует на исполнительный орган (заслонку, клапан). АСУ непрямого действия – АСУ, в которой управляющее воздействие создается за счет энергии дополнительного источника. 2. Алгоритм функционирования устройства (системы) – совокупность предписаний, ведущих к правильному выполнению технического процесса в каком-либо устройстве или в совокупности устройств (системе). К алгоритмам функционирования относятся: 1) Алгоритм стабилизации, который требует постоянства вектора выходного состояния ОУ Y ( t ) и равенство его заданному значению Yz. Yz = const. (1.8) При этом заданное значение должно оставаться постоянным в течении достаточно долгого периода времени. Примером систем, в которых используется алгоритм стабилизации, являются приводы главного движения станочного оборудования. 2) Программный алгоритм, для которого характерно изменение вектора выходного состояния ОУ по наперед известному закону или программе. В этом случае заданное значение вектора выходного состояния является известной функцией времени, то есть:
Yz ( t )= Fz ( t ). (1.9)
Примером использования такого алгоритма являются системы числового программного управления. 3) Следящий алгоритм работы ОУ характеризуется тем, что требуемый закон изменения вектора выходного состояния объекта заранее неизвестен. Следящий алгоритм может быть описан выражением:
Yz ( t )= F0( t ), (1.10)
где F0( t ) – неопределенная функция времени.
Таким алгоритмом работы характеризуются системы наведения или слежения за состоянием объекта, изменяющегося по случайному закону. Например, системы компенсации износа режущего инструмента. Графическое представление алгоритмов функционирования для вектора выходного состояния, содержащего только одну компоненту, представлено на рис. 6.
Рис. 6. Алгоритмы функционирования ОУ
Алгоритм управления – совокупность предписаний, определяющая характер воздействий извне на объект управления, обеспечивающих его алгоритм функционирования. Алгоритм функционирования управляющего устройства – зависимость управляющего воздействия от задающего воздействия, управляемой величины и дополнительного возмущающего воздействия. Для одномерной АСУ алгоритм управления можно записать следующим образом:
y(t) = Ау[ xз(t), x(t), zд(t)] (1.11)
Алгоритм функционирования объекта управления – зависимость управляемой величины от управляющего и основного возмущающего воздействий. Для одномерной АСУ алгоритм функционирования объекта можно записать следующим образом:
x(t) = Ао[ y(t), zо(t)]. (1.12)
Алгоритм функционирования объекта и алгоритм управления в совокупности образуют алгоритм функционирования АСУ. Алгоритмическая структура (схема) – структура (схема), представляющая собой совокупность взаимосвязанных алгоритмических звеньев и характеризующая алгоритмы преобразования информации в АСУ. При этом, алгоритмическое звено - часть алгоритмической структуры АСУ, соответствующая определенному математическому или логическому алгоритму преобразования сигнала. Если алгоритмическое звено выполняет одну простейшую математическую или логическую операцию, то его называют элементарным алгоритмическим звеном. На схемах алгоритмические звенья изображают прямоугольниками, внутри которых записывают соответствующие операторы преобразования сигналов. Иногда вместо операторов в формульном виде приводят графики зависимости выходной величины от входной или графики переходных функций. Различают следующие виды алгоритмических звеньев: ü статическое; ü динамическое; ü арифметическое; ü логическое. Статическое звено – звено, преобразующее входной сигнал в выходной мгновенно (без инерции). Связь между входным и выходным сигналами статического звена описывается обычно алгебраической функцией. К статическим звеньям относятся различные безынерционные преобразователи, например, резистивный делитель напряжения. Динамическое звено – звено, преобразующее входной сигнал в выходной в соответствии с операциями интегрирования и дифференцирования во времени. Связь между входным и выходным сигналами динамического звена описывается обыкновенными дифференциальными уравнениями. К классу динамических звеньев относятся элементы АСУ, обладающие способностью накапливать какой-либо вид энергии или вещества, например, интегратор на основе электрического конденсатора. Арифметическое звено – звено, осуществляющее одну из арифметических операций: суммирование, вычитание, умножение, деление. Наиболее часто встречающееся в автоматике арифметическое звено – звено, выполняющее алгебраическое суммирование сигналов, называют сумматором. Логическое звено – звено, выполняющее какую-либо логическую операцию: логическое умножение («И»), логическое сложение («ИЛИ»), логическое отрицание («НЕ») и т. д. Входной и выходной сигналы логического звена являются обычно дискретными и рассматриваются как логические переменные. Конструктивная структура (схема) – структура (схема), отражающая конкретное схемное, конструктивное и прочее исполнение АСУ. К конструктивным схемам относятся: кинематические схемы устройств, принципиальные и монтажные схемы электрические соединений и т. д. 3. Автоматические системы, применяемые при автоматизации производственных процессов, в зависимости от характера и объема операций, выполняемых ими, можно разделить на системы автоматического контроля, автоматического регулирования, автоматического управления, следящие, автоматической защиты, адаптивные и т. д. Автоматические системы могут быть комбинированными, т. е. представлять собой совокупность нескольких систем. Например, система автоматического регулирования представляет собой совокупность систем автоматического контроля и управления. Автоматические системы могут также различаться видами применяемых в них устройств, параметрами, конструктивными решениями и т. д. Следящая система – автоматическая система, в которой выходная величина воспроизводит с определенной точностью входную величину, характер изменения которой заранее не известен. Следящие системы используют для различных целей. В качестве выходной величины следящей системы можно рассматривать совершенно различные величины. Одной из наиболее широко распространенных разновидностей следящих систем являются системы управления положением объектов. Такие системы можно рассматривать как дальнейшее развитие и усовершенствование систем дистанционной передачи угловых или линейных перемещений, в которых регулируемой величиной обычно является угол поворота объекта. Следящая система представлена на рис. 7.
Рис. 7. Функциональная схема следящей системы
На элемент сравнения (ЭС) от задающего элемента (ЗЭ), связанного с входным валом следящей системы, поступает входная величина α вх. Сюда же от объекта управления (ОУ), связанного с выходным валом системы, поступает значение угла обработки α вых. В результате сравнения этих величин на выходе элемента сравнения появляется рассогласование Θ = α вх - α вых Сигнал рассогласования с выхода элемента сравнения поступает на преобразователь (Пр), в котором угол Θ преобразуется в пропорциональное ему напряжение U0 – сигнал ошибки. Однако в большинстве случаев мощность сигнала ошибки недостаточна для приведения в действие исполнительного двигателя (М). Поэтому между преобразователем и исполнительным двигателем включают усилитель (У), обеспечивающий необходимое усиление сигнала ошибки по мощности. Усиленное напряжение с выхода усилителя поступает на М, который приводит в действие объект управления, а перемещение α вых последнего передается на принимающий элемент измерительной схемы, т. е. на элемент сравнения. Адаптивная (самоприспосабливающаяся) система – система автоматического управления, у которой автоматически изменяется способ функционирования управляющей части для осуществления в каком-либо смысле наилучшего управления. В зависимости от поставленной задачи и методов ее решения возможны различные законы управления, поэтому адаптивные системы разделяют на следующие виды:
ü адаптивные системы функционального регулирования, где управляющее воздействие является функцией какого-либо параметра, например, подача – функция одной из составляющих силы резания, скорость резания – функция мощности; ü адаптивные системы предельного (экстремального) регулирования, которые обеспечивают поддержание предельного значения одного или нескольких параметров в объекте; ü адаптивные системы оптимального регулирования, в которых учитывается совокупность многих факторов с помощью комплексного критерия оптимальности. В соответствии с этим критерием осуществляется изменение регулируемых параметров и величин, например, поддержание в станке режима обработки, обеспечивающего максимальную производительность и наименьшую себестоимость обработки, определяется заданием оптимальных значений параметров (скоростей сил резания, температуры и т. д.), от которых зависят производительность и себестоимость процесса обработки.
|
Последнее изменение этой страницы: 2019-06-19; Просмотров: 405; Нарушение авторского права страницы
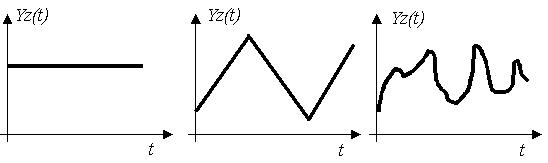 Стабилизация Программный Следящий
Стабилизация Программный Следящий 