|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Назначение и классификация АПСтр 1 из 9Следующая ⇒
Назначение и классификация АП Часть 1 | 2
Авиационные приборы и бортовые измерительно-вычислительные комплексы служат для контроля параметров полета, работы силовых установок, различных бортовых систем и агрегатов, а также состояния окружающей атмосферы. В соответствии с этим назначением выделяют следующие группы авиационных приборов:
- пилотажно-навигационные приборы и системы; - приборы контроля работы силовой установки; приборы контроля работы отдельных бортовых систем и агрегатов; - приборы контроля параметров окружающей атмосферы.
Пилотажно-навигационные приборы и системы измеряют параметры движения центра масс летательного аппарата (координаты местонахождения, высоту, скорость, линейные ускорения), углы пространственной ориентации летательного аппарата относительно земли (углы курса, крена, тангажа) и относительно набегающего воздушного потока (углы атаки, скольжения). К пилотажно-навигационным приборам и системам относятся аэрометрические приборы (высотомеры, указатели скорости и числа маха, вариометры), системы воздушных сигналов, информационные комплексы высотно-скоростных параметров полета, измерители углов атаки и скольжения, пилотажные гироскопические приборы (авиагоризонты, гировертикали, гирополукомпасы), курсовые системы, курсовертикали и различные навигационные системы, изучение которых выходит за рамки данного учебника. На современных летательных аппаратах пилотажно-навигационные приборы, навигационные системы, бортовые вычислительные устройства и системы автоматического управления, как правило, объединяются в пилотажно-навигационный комплекс, представляющий собой большую информационно-управляющую систему. Приборы контроля работы силовой установки измеряют частоту вращения вала авиадвигателя, температуру газа и масла, давление топлива, масла и газов, запас и расход топлива, вибрацию и другие параметры. К этой группе приборов относятся тахометры, манометры, термометры, топливомеры, расходомеры, измерители вибрации и другие приборы.
Параметрами, характеризующими работу различных бортовых систем и агрегатов, являются: температура, давление и расход жидкостей и газов, положение различных органов управления летательного аппарата и др. Эти параметры измеряются манометрами, термометрами, указателями расхода воздуха, высоты и перепада давления в гермокабинах, положения закрылков, стабилизаторов, стреловидности крыла и другими приборами.
К параметрам окружающей атмосферы относятся температура, давление, влажность и скорость ветра. Измеряются эти параметры барометрами, термометрами, гигрометрами, плотномерами и измерителями скорости ветра. Кроме перечисленных приборов в последние годы на летательных аппаратах все большее распространение получают различные датчики, служащие для выработки измерительной информации в форме, удобной для ее преобразования и передачи, но не для непосредственного наблюдения. Основные понятия и структуры приборного комплекса Часть 1 | 2 | 3 | 4
Под приборным комплексом понимается совокупность бортовых измерительных и вычислительных средств, служащих для восприятия, обработки, хранения и преобразования информации, необходимой для успешного выполнения полетного задания. Обобщенная структурная схема современного бортового приборного комплекса представлена на рис. 1. Здесь приняты следующие обозначения: УВИm, т = 1, М - устройства, воспринимающие информацию о линейных и угловых координатах положения ЛА в пространстве или информацию о параметрах, характеризующих работу его силовых установок, отдельных систем и агрегатов; УОИn, n = 1, N - устройства первичной обработки информации, поступившей от устройств, ее воспринимающих; БВС - бортовая вычислительная система; УИl, l= 1, L - устройства индикации; УCk, k = 1, K - устройства сопряжения бортового приборного комплекса cдругими системами и комплексами. Отличительными особенностями задач, решаемых современными ЛА, являются все увеличивающиеся скорости, дальности и высоты полета в условиях действия разнообразных и многочисленных внешних факторов. При этом требования к точности и надежности решения полетных задач возрастают. Выполнить эти задачи возможно путем комплексирования приборного оборудования - его объединения на базе бортовых средств вычислительной техники. Рис. 1. Обобщенная структурная схема приборного комплекса
Основные понятия и структуры приборного комплекса Часть 1 | 2 | 3 | 4
Каждое устройство, воспринимающее информацию об определенном параметре, может быть связано с одним или несколькими микропроцессорами. Порядок подключения микропроцессоров и выполняемые ими операции определяются алгоритмами вычислений, задаваемыми решаемыми измерительными задачами.
Устройства, воспринимающие информацию о параметрах, подключаются к микро-ЭВМ, которая производит их первичную обработку по различным алгоритмам в соответствии с решаемыми задачами.
Выходные сигналы устройств обработки информации могут поступать как потребителям (экипажу через устройства индикации и другим системам и комплексам через устройства сопряжения), так и в бортовую вычислительную систему для дальнейшей обработки. Условия, в которых используется бортовое оборудование, накладывают жесткие ограничения на физические, технические и эксплуатационные характеристики компонентов бортовой вычислительной системы. Средства вычислительной техники выполняют на борту следующие функции: преобразования сигналов - как аналого-цифрового, так и цифроаналогового; кодирования информации - входной для обработки, выходной для передачи и представления потребителям; интерфейса, осуществляющего в соответствии с правилами, задаваемыми управляющей программой, связь между устройствами комплекса; комплексной обработки поступающей в вычислительную систему информации с целью получения всех выходных данных, необходимых потребителям; контроля состояния аппаратуры комплекса, диагностики ее отказов и управления функционированием всей аппаратуры как в соответствии с ее состоянием, так и в соответствии с изменяющимися внешними условиями.
Основные понятия и структуры приборного комплекса Часть 1 | 2 | 3 | 4
Информационные связи между устройствами комплекса описываются его топологией. Обобщенная топология бортового комплекса представлена на рис. 2. Топологическими элементами Rj, Rji, Rnl…k в этой структуре могут быть процессоры, ЦВМ, устройства сбора информации, устройства ее хранения, устройства индикации, измерительные преобразователи и системы, устройства управления и т. п. Линии передачи информации реализуются в такой структуре в виде обычных каналов связи между отдельными устройствами и мультиплексных магистралей, осуществляющих с помощью ЦВМ одновременную передачу информации для различных устройств.
Приборные комплексы могут иметь централизованную, федеративную или распределенную топологию. Рис. 2. Обобщенная типология приборного комплекса
Типичной для централизованной топологии является структура с одной мощной ЦВМ, показанная на рис. 3.
Одна ЭВМ в этой структуре связана со многими устройствами, которые воспринимают информацию и осуществляют ее первичную обработку (ИУn, n = 1, N), а также индикаторами (УИl, l= 1, L), и устройствами сопряжения с другими системами (УCk, k = 1, K).
Появление топологии с одной мощной ЦВМ на борту было вызвано экономическими причинами. Но она обладает существенным недостатком: модификация ее стоит очень дорого. Дорого обходится как введение дополнительной аппаратуры и избыточности, так и расширение функций комплекса, связанное с радикальным пересмотром математического обеспечения ЦВМ. Эта структура сохраняет свое значение лишь на уникальных ЛА.
Федеративная структура предполагает, что для связи ЦВМ и процессоров между собой и для связи процессоров с устройствами, воспринимающими информацию, используются различные магистрали. В этих структурах допускается некоторая функциональная избыточность и расширение состава оборудования.
Наибольший интерес в настоящее время представляет собой топология распределенных систем. Отличие структур этого класса состоит в том, что здесь каждый вычислитель имеет свой собственный набор внешних устройств, воспринимающих информацию и отображающих ее. Связь отдельных фрагментов такой структуры между собой может осуществляться только через вычислитель. Вычислительные функции распределены здесь между различными и независимыми с точки зрения управления их вычислительным процессом ЭВМ.
Рис. 3. Централизованная типология приборного комплекса
Независимость ЦВМ придает комплексу, построенному в соответствии с распределенной топологией, очень важное свойство - отдельные системы и подсистемы комплекса, связанные с определенной ЦВМ, можно проектировать и отлаживать одновременно независимо друг от друга, после того как к ним предъявлены требования со стороны комплекса в целом. Кроме того, ЦВМ может быть ориентирована на решение определенного круга задач, например задач статистической обработки сигналов, задач генерирования сигнальной информации. Разработка математического обеспечения для такой ЦВМ упрощается, так как оно предназначено для решения однотипных задач. И, наконец, в распределенных топологиях можно использовать любые методы повышения надежности, в том числе и резервирование самой ЦВМ различной кратности. Основной недостаток распределенных структур связан с разнотипностью вычислителей, которые используются в отдельных системах, входящих в приборный комплекс. Объединение таких ЦВМ в единую структуру связано с большими техническими трудностями и экономическими затратами, требует разработки специальных сопрягающих преобразователей. Перспективные приборные комплексы будут использовать унифицированные вычислительные элементы на базе микропроцессоров. Задача проектирования такого комплекса будет состоять в выборе оптимального набора унифицированных вычислительных модулей и дополняющих их элементов с целью построения развивающейся структуры с гибкой системой связей.
Канал измерения расхода Приборы и датчики, измеряющие расход топлива в единицу времени (расходомеры), применяются для выдерживания наиболее экономичного режима полета, отвечающего минимуму расхода горючего на километр пройденного пути (с учетом скорости полета). Эта же задача может решаться автоматически с помощью экстремального регулятора, воспринимающими устройствами которого служат датчик расхода топлива и датчик скорости полета. Зная запас топлива и его расход, можно вычислить возможную длительность и дальность полета, а также с учетом скорости полета и дальность. Принцип действия тахометрических (скоростных или турбинных) расходомеров основан на зависимости скорости вращения расположенной в трубопроводе ненагруженной тангенциальной крыльчатки (турбины) от расхода жидкости.
Достоинством метода является пропорциональная зависимость скорости вращения крыльчатки от расхода жидкости.
Частота вращения крыльчатки зависит не только от величины расхода, но также от вязкости жидкости (температуры), что вызывает появление погрешностей прибора.
В приборах мгновенного расхода сигнал тахогенератора (напряжение или частота) служит мерой измеряемого расхода.
2.1.1. Математическая модель Частота вращения ненагруженной крыльчатки пропорциональна скорости потока, т. е.
где к – коэффициент, зависящий от параметров крыльчатки; Ѕ – скорость потока, км/ч. Мгновенный объемный расход может быть выражен формулой
а мгновенный массовый расход
где Б – плотность жидкости, гр/см3; S– сечение трубопровода, м2; Если воспользоваться формулами (2) и (4) получим
Тахометрические расходомеры Часть 1 | 2 | 3 Особенности конструкции Для построения приборов, измеряющих объемный расход, необходимо измерять частоту вращения крыльчатки. В массовых расходомерах помимо частоты измеряют плотность Б. В качестве измерителей частоты применяют тахогенераторы переменного тока. Измерение угловой скорости осуществляется магнитоиндукционным тахометрическим узлом (рис.8).
Рис. 8.Кинематическая схема датчика расходомера Постоянный магнит 2 узла приводится во вращение крыльчаткой 1. Для уменьшения температурных погрешностей применен термомагнитный шунт 3. Герметичность датчика обеспечивается применением диамагнитного кожуха 4. При вращении магнита в чувствительном элементе 5 наводятся вихревые токи, взаимодействующие с полем магнита. Поворот чувствительного элемента (стакана) ограничивается противодействующей пружиной 6. Очевидно, угол поворота стакана пропорционален мгновенному расходу топлива. На оси стакана находится ротор сельсина-датчика 7 синхронной передачи. Сельсин-приемник помещен в указателе прибора, причем его ротор перемещает стрелку прибора в соответствии с изменением мгновенного расхода топлива. Схема сельсинной передачи представлена на рис.9. Обмотки возбуждения 1 и 1’ и обмотки синхронизации 2 и 2’ размещены на статоре сельсина-датчика (С–Д) и сельсина-приемника (С–П).
Цилиндрический ротор сельсина состоит из двух пакетов листовой электротехнической стали, впрессованных в пластмассу. Индуктируемые в синхронизирующих обмотках 2 и 2’ эдсзависят от углового положения роторов. При несинхронном положении роторов возникает синхронизирующий момент, устанавливающий ротор сельсина-приемника в положение, синхронное с ротором датчика. Шкала мгновенного расхода градуируется в кг/ч.
Современные разработки
Турбинные преобразователи расхода (рис.19) предназначены для выдачи информации об объемном расходе измеряемой жидкости в виде частотного электрического сигнала синусоидальной формы с максимальной частотой для ТПР1 6 250 Гц, а для ТПР7 20 500 Гц и амплитудой сигнала на минимальной частоте не менее 25 мВ при наземных (стендовых) испытаниях изделий.
Измеряемая среда:
I группа – неагрессивные смазывающие жидкости (углеводородистые топлива, жидкости гидросистем, промышленные масла);
II группа – неагрессивные несмазывающие жидкости (вода, спирт, аммиак);
III группа – однофазные криогенные жидкости (оксид, энерген);
IV группа – агрессивные жидкости (амил меланж I).
Рис. 19. Турбинный преобразователь расхода ТПР1-20 Кинематическая вязкость измеряемой среды до 100 сСт. Температура измеряемой среды: от - 200 до +200 °С – для неагрессивных и однофазных криогенных жидкостей; от - 60 до +50 °С – для агрессивных жидкостей. Кинематическая вязкость измеряемой среды до 100 сСт. Температура измеряемой среды: от - 200 до +200 °С – для неагрессивных и однофазных криогенных жидкостей; от - 60 до +50 °С – для агрессивных жидкостей.
Рис. 20. Массовые расходомеры Danfoss MASSFLO
Расходомеры Danfoss MASSFLO (рис.20) измеряют расход непосредственно в кг/ч. Кроме того, расходомеры MASSFLO измеряют: Плотность; Температуру. Расходомеры MASSFLO выполняются из нержавеющей стали, сплава Хастеллой и с встроенной системой подогрева. Расходомеры MASSFLO могут быть получены во взрывобезопасном исполнении. Параметры массового расходомера Danfoss MASSFLO: Диаметры: DN 10 ч 1200 мм; Диапазон расхода: 0.2 ч 45000 м3/ч; Температура среды: от –200 до +250 °С; Максимальное давление: 160 Бар; Точность: 0.15%. Класс защиты: IP 68 Топливо измерительные комплексы представляют собой совокупность расходомерной, топливомерной, автоматической и вычисления располагаемой дальности систем, которые позволяют летному экипажу измерять количество топлива в баках на земле и в полете с помощью индикатора ИСТР4–5, осуществлять контроль централизованной заправки на земле, определять суммарное и мгновенное значение расхода топлива, а следовательно, производить вычисление и индикацию дальности и времени полета на текущем и оптимальном режимах работы двигателей.
Но, несмотря на общие задачи, расположение топливомерно-расходомерных систем, объем топливных баков и порядок выработки топлива в целях сохранения центровки, которая обеспечивается специальными автоматами, осуществляющие выработку топлива из отдельных групп баков по определенной программе, индивидуальны для каждого типа самолета и его модификаций. Поэтому каждый тип самолета имеет свой топливо измерительный комплекс, отличающийся по устройству, комплектности и маркировке от топливо измерительного комплекса другого типа самолета. Помимо вышеперечисленных возможностей применение комплексных систем программного управления и измерения топлива позволяет, наличием специального компенсационного моста, компенсировать методические погрешности, связанные с изменением температуры или сорта топлива.
В настоящее время широкое применение находят топливомерно-расходомерные системы СТР2–2А, СТР6–2А, СТР7–2А, СТР6–5, СПУТ 1–5, СПУТ 4–1. Виды топливомеров Приборы, измеряющие объемное или весовое количество топлива в баках, называются топливомерами. Они позволяют экипажу самолета в любой момент полета определить, сколько топлива имеется в баках, и оценить время, в течение которого можно продолжать полет. Подобные приборы служат также для измерения запаса масла (масломеры). Непосредственное измерение объема (веса) топлива на борту самолета неосуществимо, поэтому применяются косвенные методы измерения, в которых объем (вес) топлива функционально связан с какой-либо легко определяемой величиной. В качестве таких величин выбирают уровень или вес столба топлива в баке. С помощью топливомеров определяют суммарный запас топлива во всех баках и количество топлива в каждом из них в отдельности. Необходимо знать, как распределено топливо между баками, для того чтобы определить правильную последовательность расходования топлива из баков во избежание недопустимого смещения центра масс самолета. Переключением баков управляют автоматические устройства топливомеров. Большинство методов измерения количества топлива сводится к измерению его уровня (высоты столба жидкости). Однако шкалы указателей топливомеров градуируют в единицах объема (литрах) или в килограммах. Поэтому тарировка шкалы зависит от размеров и формы топливного бака, для которого предназначен прибор. Классифицируя топливомеры по принципу действия чувствительного элемента, можно отметить следующие типы, получившие распространение: 1) поплавковые, основанные на измерении уровня (объема) топлива с помощью плавающего на поверхности поплавка; 2) манометрические, основанные на измерении давления (веса) столба топлива с помощью манометра; 3) емкостные, основанные на измерении уровня (объема) топлива с помощью специального конденсатора, емкость которого связана функционально с уровнем топлива в баке.
Топливомеры должны быть дистанционными. Этому требованию удовлетворяют электрические топливомеры. Механические топливомеры, не являясь дистанционными, почти не применяются в авиации. Назначение, функции, состав приборов контроля силовых установок. Требования к точностным характеристикам Часть 1 | 2 Системы контроля и измерительные информационные системы – это системы, предназначенные для количественной оценки состояния параметров объекта исследования или управления путём проведения различных операций измерения, обработки измерительной и контрольной информации, хранения, передачи и выдачи её в виде именованных чисел, графиков, суждений и т.п. человеку, вычислительной машине или системе управления. Измерительные информационные системы контроля и управления силовых установок современного самолёта включают системы контроля, обработки и представления информации о техническом состоянии двигателей самолёта, вспомогательной силовой установки, масляной и топливной систем. Таким образом, информационная измерительная система авиационных силовых установок должна осуществлять: - непрерывный контроль состояния силовой установки в условиях полета для обеспечения летчика краткой и достоверной информацией в данный момент времени; - регистрацию информации, нужной для оценки измерения и прогнозирования состояния ответственных деталей, узлов и систем с целью обеспечения необходимыми данными службы технической эксплуатации. Реализация этих функций позволит предотвратить вторичные разрушения в двигателе, повысить эксплуатационную надежность и безопасность полетов, сократить трудозатраты на техническую эксплуатацию и расход запасных частей, а также время простоев самолетов. Информационные системы включают в себя аппаратуру для получения исходных данных (датчики), электронную аппаратуру для обработки этих данных и устройства отображения и регистрации данных. Они применяются как в полете — для анализа данных и установления диагноза, сообщения экипажу четкой рекомендации по производству полета и указания на ремонт, необходимый по прибытии к месту назначения, так и на стоянках— для указания вида ремонта самолета и его систем (по месту стоянки или в мастерских), и ремонтных мастерских — для сведения до минимума затрат на ремонтные работы за счет точного диагноза неисправностей и реализации метода технического обслуживания и «по фактическому состоянию». При применении систем контроля предусматривается непрерывный опрос датчиков на всех этапах работы двигателя, включая переходные режимы (запуск, приемистость и выключение). Правильность измерения параметров обеспечивается путем отсева заведомо выпадающих значений. Чтобы исключить влияние помех, выбирается соответствующая частота опроса, а полученные значения осредняются. Одновременно параметры проверяются на превышение установленных пределов для выдачи сигналов предупреждения.
Рис. 1. Информационная измерительная система силовой установки На рис. 1 показана система силовой установки, в которой наряду с традиционным комплексом приборов контроля, автоматом дозировки топлива 11 и блоком автоматического запуска 10 применяется устройство для ввода программ контроля 4, узел ручного ввода программ 5, преобразователь аналоговых и дискретных сигналов 2, счетно-решающее устройство 7, коммутатор 8, блок памяти 6, устройство ручного ввода команд 3, органы управления 1, устройство 9, выдающее информацию в регистратор и кабину экипажа. В связи с применением машинной обработки параметров возникли возможности повышения точности измерений путем использования систем коррекции, алгоритмов измерения средних значений при наличии помех различного характера, а также схем анализа и выделения динамических показателей контролируемой характеристики. Причинами снижения достоверности выходной информации могут быть: - воздействие помех при передаче, хранении и переработке информации; - отказы и сбои в работе аппаратуры; - структурные и алгоритмические ошибки; - использование недостоверных входных данных; - ошибки человека как звена системы. Датчики в системах контроля являются особо важным звеном, которое в достаточной мере определяет качество всей системы. Поэтому к ним предъявляются особые требования по точности, надежности, способности работать в жестких условиях окружающей среды. Необходимо отметить, что надежность датчиков должна быть в несколько раз выше надежности двигателя, так как для экипажа и любой вычислительной машины отказ датчика чаще всего равнозначен отказу всего двигателя. В этом случае возникает необходимость в логической и очень быстрой обработке ряда параметров, а также резервирования датчиков, причем, с точки зрения надежности предпочтительно измерение одного параметра датчиками, использующими различные принципы измерения и в разной степени испытывающие воздействия окружающей среды.
Из всех внешних воздействий, существенно влияющих на точность измерения, основными являются климатические воздействия, и в первую очередь, температурные.
Канал измерения давления Часть 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 Разновидности датчиков давления, их назначение. Приборы, предназначенные для измерения давления называются манометрами. По назначению авиационные манометры делят на манометры, измеряющие абсолютное давление, разность давлений (дифференциальные) и отношение двух давлений. Дифференциальные манометры используются для измерения избыточных давлений жидкостей и газов в различных отсеках авиационных двигателей (в топливной системе, системе смазки и т.д.). Манометры абсолютного давления (моновакууметры) применяются для измерения давления во всасывающих системах. Манометры отношения давлений служат для контроля степени сжатия газов в различных ступенях газотурбинных двигателей.
Помимо манометров со стрелочной индикацией, на летательных аппаратах широко применяются сигнализаторы и датчики давлений. Сигнализаторы давлений включают электрический сигнал при выходе измеряемого давления за допустимые для нормальной работы двигателя пределы. Датчик давления выдает электрический сигнал, пропорциональный измеряемому давлению и используемый для автоматического управления системами ЛА или для дальнейшей передачи на указатели в дистанционных манометрах. По методам измерения давления манометры можно разделить на следующие группы: - механические (недистанционные), в том числе жидкостные, весовые и пружинные. - электромеханические, в которых механический чувствительный элемент сочетается с электрической дистанционной передачей. - электрические, в том числе электронные, газоразрядные, радиоактивные, тепловые пьезорезисторные. При использовании чисто механических манометров давление должно подводиться с помощью трубопроводов непосредственно к приборной доске самолета. Наличие трубопроводов снижает эксплуатационную надежность системы (из-за возможной разгерметизации системы в случае поломки трубопровода) и приводит к запаздыванию показаний при измерении давления. Именно этот фактор обуславливает бесперспективность развития недистанционных манометров. От этих недостатков избавлены дистанционные электромеханические манометры, в которых датчик, содержащий механический чувствительный элемент с электрическим преобразователем, устанавливается непосредственно у объекта измерений. При этом электрические сигналы, снимаемые с датчика, передаются по электропроводам и воспринимаются расположенным на приборной доске электроизмерительным прибором или используется в системах автоматического регулирования. Датчиком давления измерительно-информационной системы называют конструктивную совокупность одного или нескольких измерительных преобразователей, размещаемых непосредственно у объекта измерений и преобразующих измеряемые (контролируемые) давления в величины удобные для передачи по каналам связи и дальнейшего преобразования.
Рис. 5.Структурная схема датчика давления В измерительных упругих элементах происходит преобразование измеряемого давления в усилие, которое деформирует упругий элемент и уравновешивается возникающими в нем упругими силами. В чувствительном элементе датчика происходит преобразование физической величины, в данном случае деформации упругого элемента, в электрический сигнал. Металлические тензодатчики Металлический тензодатчик представляет собой основание с закрепленным на нем резистивным элементом. Измеряемое давление преобразуется в силу с помощью упругого элемента. Под действием силы основание с закрепленным элементом изменяет свои размеры (сжимается или растягивается), и тензорезистор, под действием механического напряжения изменяет свое сопротивление. Сила, воздействуя на проволочку (площадью сечения А, длиной L, с удельным сопротивлением Б ), вызовет удлинение или сжатие последней, что приведет к пропорциональному увеличению или уменьшению ее сопротивления:
где S – характеризует тензочувствительность (значение 2.0..4.5 для металлов), Наклеиваемый тензодатчик состоит из тонкой проволочки или проводящей фольги, закрепленной на плоской пластине. Эта конструкция затем приклеивается на основание. Датчик обычно устанавливается так, чтобы его наиболее длинная сторона была ориентирована в направлении измеряемой силы. Такие датчики характеризуются малой площадью поверхности, малой утечкой, высокой изоляцией. Фольговые датчики являются наиболее популярной версией наклеиваемых тензодатчиков. Они изготавливаются методом фототравления и используют те же металлы, что и проволочные датчики (константан, нихром, сплав никеля с железом и т. д.). Металлофольговый тензодатчик характеризуется большой площадью, стабильностью в диапазоне температур, малым поперечным сечением, хорошим рассеиванием тепла. Проволочные датчики имеют малую поверхность связи с основанием, что уменьшает токи утечки при высоких температурах и дает большее напряжение изоляции между чувствительным элементом и основанием. С другой стороны, фольговые чувствительные элементы имеют большое отношение площади поверхности к площади поперечного сечения (чувствительность) и более стабильны при критических температурах и длительных нагрузках. Большая площадь поверхности и малое поперечное сечение также обеспечивают хороший температурный контакт чувствительного элемента с основанием, что уменьшает саморазогрев датчика. Пьезорезонансные датчики Пьезорезонансными называются датчики давления, в которых роль чувствительного элемента выполняет пьезоэлектрический резонатор. Они являются датчиками параметрического типа, в которых преобразование давления осуществляется в результате модуляции параметров пьезорезонатора (ПР). Основа ПР – механический вибратор из кристаллического или поликристаллического пьезоэлектрического материала. На вибратор наносится система из двух или более электродов, используемых для возбуждения в нем механических колебаний. Для соединения с источником электрической энергии ПР снабжается токопроводами, а для фиксации в присоединенной конструкции – элементами крепления. В основе работы ПР лежит пьезоэффект, обеспечивающий преобразование входного электрического напряжения, подводимого к электродам, в механические напряжения в теле вибратора (обратный пьезоэффект) и ответную реакцию по выходу в виде зарядов на электродах, возникающих в результате деформаций вибратора под действием механических напряжений (прямой пьезоэффект). В конструктивном отношении преобразователи давления могут быть разделены на две группы: 1) в которых чувствительный резонатор работает в прямом контакте со средой; 2) в которых резонатор отделен от среды разделительным (упругим) элементом.
Рис. 3. Основные разновидности пьезорезонансных датчиков давления М – мембрана; К – корпус; УЭ – упругий элемент; ЖЦ – жёсткий цетр. Большинство пьезорезонансных датчиков давления строится с использованием разделительных упругих элементов. Разделительные элементы обеспечивают оптимальные условия работы резонаторов, делают возможной вакуумизацию или герметизацию рабочей пластины с пьезоэлементом, что повышает добротность и снижает старение ПР. Упругие элементы могут подбираться так, что на различные диапазоны измерения может быть использован один номинал ПР.
Контакт между резонатором и упругим элементом может осуществляться только в свободных от колебаний областях ПР. По возможности следует исключать воздействие на пьезоэлемент поперечных, скручивающих и других нагрузок, способных разрушить ПР. Упругий элемент должен обеспечивать деформации пластины-резонатора строго в плоскости пьезоэлемента. Стабильная работа резонатора обеспечивается только в вакууме или герметизированном объеме, заполненным инертным газом (гелием). Недостатки пьезорезонансных датчиков: 1) Зависимость частоты от давления в диапазоне от 0 до 50 МПа имеет нелинейность около 1.7%. По видимому, основным источником погрешности является нелинейность характеристики цилиндрического преобразователя давления в радиальные напряжения, подводимые к резонатору. 2) Дрейф нуля датчика во времени, вызванный старением резонатора, не превышает 0.1% верхнего предела измеряемой величины. 3) Необходимость вакуумирования или герметизации резонатора. 4) Наличие температурного дрейфа нуля датчика. Практически в датчиках давления погрешность от термодеформаций можно снизить до уровня 0.1% верхнего предела, путем уменьшения соотношения жесткостей мембраны и преобразователя.
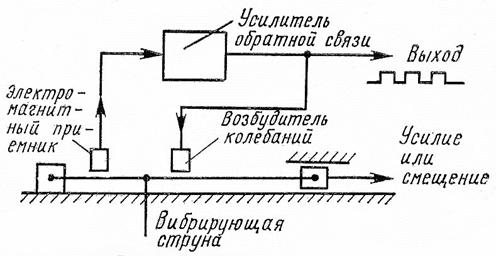
Струнные датчики Датчики в которых в качестве чувствительного элемента применяется электромеханический струнный преобразователь называются струнными. Струна одним концом жестко заделана в основание, а другой её конец растягивается измеряемой силой Р. Частота собственных поперечных колебаний струны связана с силой натяжения зависимостью:
где mи l – масса и длина струны.
Рис. 4. Принципиальная схема струнных датчиков давления Вблизи струны размещен электромагнитный приемник, сигнал которого подводится к усилителю обратной связи. Последний формирует выходной сигнал и, кроме того, запитывает возбудитель колебаний струны. Возбудители бывают электромагнитные, магнитоэлектрические, электростатические и применяются для стимулирования колебаний струны. Контур, содержащий электромагнитный приемник и усилитель обратной связи, обеспечивает поддержание колебаний постоянной амплитуды. Любые изменения нагрузки на струну будут изменять её натяжение и, следовательно, собственную частоту. Поэтому частота сигналов на выходе усилителя однозначно связана с измеряемым усилием.
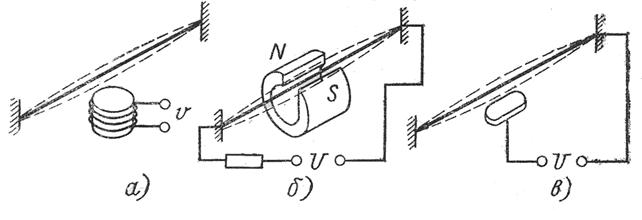
Рис. 5. Виды возбудителей колебаний струны а – электромагнитный; б – магнитоэлектрический; в – электростатический. Измеряемое давление конвертируется в силу с помощью упругого элемента. Преобразователь силы состоит из вибрирующей струны, расположенной между полюсами постоянного магнита. Струна входит в состав электрической автогенераторной схемы, поддерживающей её незатухающие поперечные колебания на резонансной частоте. Схема генератора содержит усилитель, охваченный широкополосной отрицательной и узкополосной положительной обратными связями. Центральная частота узкополосного тракта устанавливается равной средней частоте колебаний струны в требуемом рабочем диапазоне. Выходная амплитуда регулируется изменением петлевого коэффициента усиления всей системы с помощью полевого транзистора. Эта схема должна обеспечивать генерирование переменного выходного сигнала на частоте, равной резонансной частоте струны:
Датчики давления со струнными преобразователями имеют нелинейность характеристики менее 0.1%, порог чувствительности 0.05% от измеряемого давления, температурную погрешность не более 0.1% на 10єС. Струнный метод измерений рекомендуется для измерений динамических процессов с частотой колебаний 100 – 150 Гц. Отсутствие зависимости частоты от модуля продольной упругости материала снижает температурную погрешность датчика давления и повышает его метрологические характеристики. Механические напряжения в струне должны быть в пределах 2 – 6 МПа. При значениях менее 1.5 МПа колебания струны становятся несинусоидальными. Для температурной компенсации необходимо изготовлять все детали электромеханической системы преобразователя (струну, мембрану, корпус, зажимы и т. д.) из материалов с равным коэффициентом линейного расширения. Частоты колебаний струны в датчиках лежат в пределах 400 – 10 000 Гц. Возможность использования струн малого диаметра (0.01 – 0.02 мм) определяет возможность разработки миниатюрных струнных датчиков. Потенциометрические датчики В таких датчиках используется потенциометрический преобразователь перемещений. Эта конструкция является унифицированной: при переходе от одного диапазона измерений к другому так выбирается толщина мембраны, что её максимальный прогиб не изменяется.
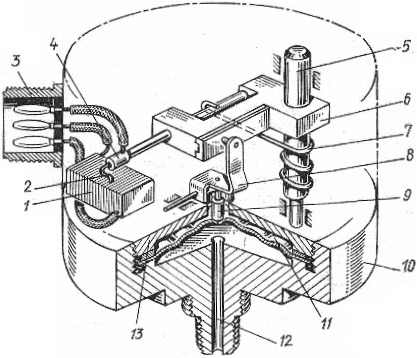
Рис. 8. Потенциометрический датчик давления. 1 – потенциометр; 2 – щетка; 3 – вилка; 4 – щеткодержатель; 5 – ось поводка; 6 – поводок; 7 – возвратная пружина; 8 – качалка; 9 – шток; 10, 13 – основания; 11 – мембрана; 12 – штуцер.
Измеряемое давление посредством мембраны преобразуется в перемещение её жесткого центра. Оно в свою очередь с помощью кинематической передачи вызывает перемещение щетки потенциометра и соответственно изменяется сопротивление. Потенциометр как преобразователь деформации в электрическое сопротивление включается в мостовую схему или в схему потенциометрической дистанционной передачи. В измерительных схемах осуществляется компенсация температурной погрешности.
Рис. 9. Принципиальная схема манометра с потенциометрическим преобразователем Сигнал деформации мембраны используется для перемещения движка потенциометра. Потенциометр R1 R2 образует два плеча моста, а два другие плеча составлены из резисторов R3 и R4. В качестве указателя в манометре применяется логометр с неподвижными рамками и подвижным магнитом. Недостатком потенциометрических датчиков является наличие скользящего контакта, снижающего надежность прибора. А также наличие межвитковой погрешности, вызванной контактом щетки и потенциометра. Максимальные погрешности этих датчиков не превышают ± 4 %.
Авиационные термометры Термометры находят широкое применение в авиации для измерения температуры твердых тел (головок цилиндров поршневых двигателей), жидкостей (масла, топлива), воздуха и газов. При изменении температуры частей двигателя и газов, вытекающих из них, погрешность измерения не должна превышать 0, 5-1 %, а при измерении температуры воздуха, масло и т. п. погрешность измерения может составить 1-2 %.
Назначение и классификация АП Часть 1 | 2
Авиационные приборы и бортовые измерительно-вычислительные комплексы служат для контроля параметров полета, работы силовых установок, различных бортовых систем и агрегатов, а также состояния окружающей атмосферы. В соответствии с этим назначением выделяют следующие группы авиационных приборов:
- пилотажно-навигационные приборы и системы; - приборы контроля работы силовой установки; приборы контроля работы отдельных бортовых систем и агрегатов; - приборы контроля параметров окружающей атмосферы.
Пилотажно-навигационные приборы и системы измеряют параметры движения центра масс летательного аппарата (координаты местонахождения, высоту, скорость, линейные ускорения), углы пространственной ориентации летательного аппарата относительно земли (углы курса, крена, тангажа) и относительно набегающего воздушного потока (углы атаки, скольжения). К пилотажно-навигационным приборам и системам относятся аэрометрические приборы (высотомеры, указатели скорости и числа маха, вариометры), системы воздушных сигналов, информационные комплексы высотно-скоростных параметров полета, измерители углов атаки и скольжения, пилотажные гироскопические приборы (авиагоризонты, гировертикали, гирополукомпасы), курсовые системы, курсовертикали и различные навигационные системы, изучение которых выходит за рамки данного учебника. На современных летательных аппаратах пилотажно-навигационные приборы, навигационные системы, бортовые вычислительные устройства и системы автоматического управления, как правило, объединяются в пилотажно-навигационный комплекс, представляющий собой большую информационно-управляющую систему. Приборы контроля работы силовой установки измеряют частоту вращения вала авиадвигателя, температуру газа и масла, давление топлива, масла и газов, запас и расход топлива, вибрацию и другие параметры. К этой группе приборов относятся тахометры, манометры, термометры, топливомеры, расходомеры, измерители вибрации и другие приборы.
Параметрами, характеризующими работу различных бортовых систем и агрегатов, являются: температура, давление и расход жидкостей и газов, положение различных органов управления летательного аппарата и др. Эти параметры измеряются манометрами, термометрами, указателями расхода воздуха, высоты и перепада давления в гермокабинах, положения закрылков, стабилизаторов, стреловидности крыла и другими приборами.
К параметрам окружающей атмосферы относятся температура, давление, влажность и скорость ветра. Измеряются эти параметры барометрами, термометрами, гигрометрами, плотномерами и измерителями скорости ветра. Кроме перечисленных приборов в последние годы на летательных аппаратах все большее распространение получают различные датчики, служащие для выработки измерительной информации в форме, удобной для ее преобразования и передачи, но не для непосредственного наблюдения. |
Последнее изменение этой страницы: 2019-06-19; Просмотров: 229; Нарушение авторского права страницы













 ;
; 
 - относительное изменение длины проволочки.
- относительное изменение длины проволочки.