|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Динамическая модель машинного агрегата ⇐ ПредыдущаяСтр 3 из 3
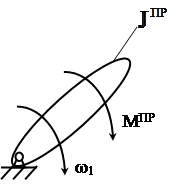
Основным условием синтеза машинного агрегата является обеспечение заданной неравномерности движения Конструктивно эта задача решается с помощью установки маховика. В результате решения задачи синтеза определяется: 1- необходимый момент инерции маховика; 2- размеры маховика; 3- место установки маховика. Для упрощения решения задач синтеза механизм заменяется его расчетной динамической моделью (рис.3.1.). Эта модель представляет собой твердое тело, обладающее некоторым моментом инерции
Рис. 3.1. Динамическая модель машинного агрегата Построение графика приведенного момента сил сопротивления
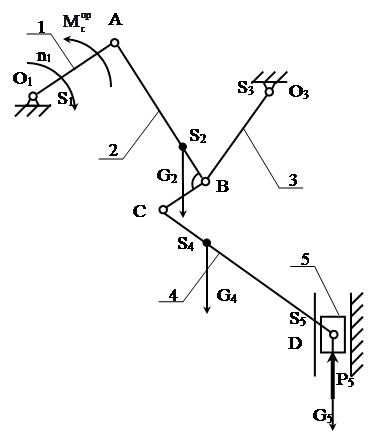
Схема механизма с приложенными к ней силами показана на рисунке 3.2.
Рис.3.2 Схема механизма с приложенными силами
На звенья механизма действуют следующие силы: 1. Силы тяжести звеньев
2. Момент сил сопротивления. Приведенный момент сил сопротивления рассчитываем по формуле:
углы Индикаторная диаграмма, показывающая давление газов в цилиндре изображена на рисунке 3.3.
Рис. 3.3 Индикаторная диаграмма Исходные данные для расчета и значения приведенного момента сил сопротивления заносим в таблицу 3.1.
Таблица 3.1 Расчет приведенного момента сил сопротивления
По таблице строим график зависимости принимаем Ординаты графика рассчитываем по формуле:
Построение графика работ сил сопротивления.
Работа сил сопротивления определяется как интеграл от момента сил сопротивления:
Интегрирование выполняется графически: 1. Разбиваем график функции на равные участки; 2. Находим значение функции в середине каждого участка; 3. Проецируем полученные точки на ось ординат; 4. Выбираем полюс интегрирования р и соединяем его с точками на оси ординат; 5. Из нулевой точки графика работ луч 1, из его конца луч 2 и т.д. Масштабный коэффициент работ:
h – полюсное расстояние интегрирования h=45, 8 мм.
Построение графика движущих сил и определение движущего момента
При построении графика движущих сил принимаем следующие допущения: 1. Момент движущих сил постоянный Мдв=const; 2. Машина работает в режиме установившегося двигателя, следовательно за цикл Адв=Ас. График Адв строим, соединяя начало и конец графика Ас. Момент сил сопротивления определяем с помощью графика, дифференцируя график Ас( Мощность двигателя рассчитывается по формуле:
Построение графика приращения кинетической энергии
Приращение кинетической энергии вычисляется по формуле:
Вычитание производим графически.
Построение графика приведенного момента инерции Исходные данные для расчета и результаты расчетазаносим в таблицу 3.2.
Таблица 3.2 Расчет приведенного момента инерции
Выбираем масштабный коэффициент:
Рассчитываем ординаты графика:
и строим график
Построение диаграммы Виттенбауэра
Для построения диаграммы Виттенбауэра Рассчитываем углы наклона касательных в диаграмме Виттенбауэра.
Проводим под углами Рассчитываем начальную кинетическую энергию и приведенный момент инерции:
Подбор маховика
Согласно заданию маховик установлен на валу кривошипа. Маховик выполняем в виде стального диска.
Рис. 3.4 Эскиз маховика
Ширину маховика принимаем равной b=0, 12 м. Диаметр маховика рассчитываем по формуле:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2020-02-16; Просмотров: 162; Нарушение авторского права страницы
 , где
, где  - фактическое значение неравномерности,
- фактическое значение неравномерности,  - допускаемое значение коэффициента неравномерности.
- допускаемое значение коэффициента неравномерности.  =0, 07
=0, 07 (
(  под действием пары сил с моментом
под действием пары сил с моментом  (
( 


 - углы между направлением соответствующих сил и скоростью их точки приложения.
- углы между направлением соответствующих сил и скоростью их точки приложения. , т.к.
, т.к. 
 ,
,  определяются по планам скоростей.
определяются по планам скоростей.

 ,
град
,
град
 Нм
Нм
 мм
мм
 . Масштабные коэффициенты:
. Масштабные коэффициенты: 
 ;
;  .
. ;
;  ;
;  где,
где,  1).
1). или
или  .
. ;
;  ;
;  .
. ;
;  , рад/с
, рад/с
 , рад/с
, рад/с
 , рад/с
, рад/с
 , мм
, мм
 ;
;  ;
;  .
. исключаем параметр
исключаем параметр  из зависимости
из зависимости  и
и  . Исключение выполняем графически.
. Исключение выполняем графически. ;
;  ;
;  ;
;  .
. и
и  касательные в диаграмме Виттенбауэра.
касательные в диаграмме Виттенбауэра. ;
; 


 где,
где,  плотность материала маховика.
плотность материала маховика.