|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Описание и модель прибора. Возможные режимы работы. Контролируемые параметрыСтр 1 из 3Следующая ⇒
ВВЕДЕНИЕ
В наше время в связи с развитием электроники вообще и автомобильной электроники в частности ставится задача создания многофункционального прибора для учебного автомобиля, которая включает в себя задачи точного измерения и индикации параметров работы двигателя автомобиля и выработки рекомендаций для водителя. Актуальность выбора именно этой темы связана с увеличением автомобильного парка в стране; в данной ситуации такой прибор мог бы помочь многим начинающим водителям научиться правильно управлять автомобилем. Данный прибор должен измерять и отображать параметры работы двигателя, а также формировать рекомендации для водителя, в частности относящихся к правильному переключению коробки передач. Индикация должна быть простой и понятной начинающему водителю. В настоящее время существует множество систем, выполняющих функции системы цифровой индикации частоты вращения коленчатого вала; системы квазианалоговой индикации частоты вращения коленчатого вала с линейной шкалой, цифровых спидометров и прочее. Проведя детальный анализ этих типов систем, находим присущие им недостатки: Для аналоговых приборов очевидный недостаток - повышенная погрешность отображения, связанная как с погрешностью самой шкалы прибора, так и с инерционностью прибора. Для систем цифровой индикации частоты вращения коленчатого вала - неудобство использования, так как при вождении машины очень неудобно отслеживать изменения на цифровом индикаторе, кроме того, все рассмотренные аналоги измеряют число импульсов, что приводит к увеличению инерционности (время подсчета составляет порядка 1 сек с небольшими вариациями от системы к системе) и абсолютной погрешности в области низких частот вращения вала (при частоте 400 об/мин - частота холостого хода число импульсов равно 6 и погрешность приближается к цифре 17%). Для приборов квазианалоговой индикации частоты вращения коленчатого вала с линейной шкалой характерно объединение недостатков и тех и других. Исходя из этих данных можно заключить, что актуальным является решение вопроса, создания учебного прибора, выполняющей функции как цифрового, так и квазианалогового тахометра с учетом требований к точности измерения, а также удобству считывания информации. В данной работе примем ряд основных положений: . Разрабатываемый прибор должен быть смешанным (объединить систему цифровой и квазианалоговой индикации частоты вращения коленчатого вала), что приведет к уменьшению погрешности отображения и повышению наглядности отображения одновременно. . В разрабатываемом приборе должна быть уменьшена инерционность за счет применения другого метода измерения, а также применения различных методов сглаживания информации. . В разрабатываемом приборе должна быть существенно уменьшена погрешность измерения (особенно в области низких частот вращения коленчатого вала), что может быть достигнуто применением другого метода подсчета. При подсчете времени погрешность измерения уменьшается в области низких частот, но повышается в области высоких частот, но это не так критично, нам не необходимы особо точные значения в этой области. Поэтому необходимо предусмотреть разбиение диапазона измеряемых частот на несколько интервалов, и введение нелинейной шкалы для удобства отображения информации. . В прибор должны быть включены также функции измерения пройденного расстояния, скорости и расхода топлива, это повысит позволит эксплуатационные характеристики прибора при незначительном его усложнении и удорожании. . Обязательно введение функций выработки рекомендаций управлением автомобилем, таких как значение ступени передачи коробки передач, превышение скорости и пр.
АНАЛИЗ ТЕХНИЧЕСКОГО ЗАДАНИЯ
Прибор относится к устройствам, выполняющим в основном функции наблюдения. Определим параметры наблюдения и их характеристики.
Требования к качеству контроля
Основными функциональными частями прибора является тахометр и спидометр, так как на основании их измерений прибор формирует рекомендации по переключению скоростей. Для обеспечения надежности и достоверности отображения данных, а также для удобства использования тахометра определим требования к качеству контроля. Для этого проанализируем параметры некоторых используемых в настоящее время тахометров (таблица 1.2). Таблица 1.2. Сравнительные характеристики тахометров
многофункциональный прибор микроконтроллер датчик
РАЗРАБОТКА СТРУКТУРЫ ПРИБОРА ОПРЕДЕЛЕНИЕ ТЕХНИЧЕСКОЙ СТРУКТУРЫ ПРИБОРА Выбор датчиков
4.1.1 Датчик частоты вращения вала двигателя Для получения импульсов, соответствующих оборотам коленчатого вала двигателя (измерительные импульсы тахометра), используем импульсы первичной обмотки системы зажигания. При этом датчик частоты вращения коленчатого вала представляет собой формирователь импульсов, которые поступают на вход (прерывания) контроллера. Данный датчик представляет из себя дифференцирующую цепь и ограничитель напряжения импульсов. При измерении периода следования импульсов, число оборотов в минуту коленчатого вала определяется выражением
где Nизм. - измеренное число квантов времени; цил.- число цилиндров в двигателе автомобиля; Dt- величина кванта времени [сек]. При Dt=2 мкс, частота определяется по формуле
4.1.2 Датчик скорости Для определения скорости используем стандартный датчик скорости (тип 2112-384301, 301.3843), в связи с тем, входит в состав оборудования автомобиля (или легко в него встраивается). Датчик выдает около 6004 импульса на каждый километр пройденного расстояния. Используем частотный способ измерения скорости (рис.4.1).
Рис.4.1.
При этом скорость вычисляется по формуле:
V=n/Tизм, (4.3)
где Тизм- время измерения, сек; n- число измеренных импульсов. На рис.4.2 показан выходной сигнал датчика угловой скорости колеса при высокой (сплошная линия) и низкой (прерывистая линия) скорости.
Рис. 4.2. Выходной сигнал датчика скорости
Выбранный датчик соответствует следующим характеристикам:
4.1.3 Датчик напряжения Датчик напряжения представляет собой АЦП, на вход которого подается напряжение, пропорциональное напряжению бортовой сети автомобиля.
Uin=k× U, (4.4)
где 0< k< 1 - коэффициент входного делителя напряжения; U=7, 0…16, 0 В - измеряемое напряжение. Необходимость введения делителя заключается в том, что максимальное измеряемое напряжение U выше напряжения питания АЦП. Так как требования к времени преобразования не велики (измерение постоянного напряжения), а повышенные требования к минимизации аппаратных затрат системы, то применим программно-аппаратный АЦП. Алгоритм работы АЦП состоит в следующем. Сигнал LV подается на вход операционного усилителя, включенного в качестве интегратора. В результате этого на выходе получается ГЛИН, возрастающий до уровня переключения компаратора. В случае достижения равного значения, подается сигнал, по которому и происходит фиксирование момента уравнивания сигналов. В этой цепи ставят резистор и стабилитрон для предохранения от пробоя. Функциональная схема АЦП приведена на рис.4.3. На схеме изображены сигналы: EOC - конец цикла преобразования (к контроллеру); RES - сброс интегратора; LV- запуск цикла преобразования. Рассчитаем параметры АЦП следующим образом. Погрешность измерения по напряжению требуется DU=±0, 1В. Число разрядов АЦП определится по следующей формуле:
Рис.4.3. Функциональная схема АЦП датчика напряжения
АЦП девятиразрядный (то есть 512 квантов). Операционный усилитель используем с диапазоном выходных напряжений 0..5 В. Пусть 1 квант равен 10 мкс, для более удобного измерения будем считать, что уровень 5В достигается за 5120 мкс (512*10=5120). Тогда параметры интегратора вычисляются, исходя из формулы:
Uвых = Uвх× t/R1× C. (4.6)
Подставляя имеющиеся данные, зададимся сопротивлением и вычислим емкость. Зная, что входное напряжение равно 2.5В, а R1=10 кОм, получим: С = 2.5 * 5120 / 1500 Исходя из полученных данных, определим время, необходимое для сброса (разряжения емкости). Учтем, что R - сопротивление открытого канала ключа VT равно около 100 Ом. Тогда время сброса равно сбр=10000× 3× /109 = 3 мкс. Возьмем время сброса с запасом - 5 мкс, тогда полный период преобразования будет длиться 5120 + 5 = 5125 мкс.
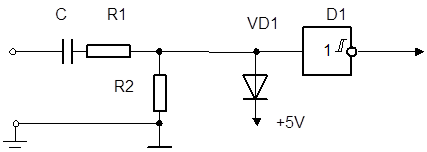
4.1.4 Сопряжение датчиков с контроллером Сигнал с датчика частоты вращения коленчатого вала поступает в виде положительных импульсов напряжения, амплитудой до 600 В с первичной обмотки катушки зажигания. Данные импульсы должны поступать на вход прерывания микроконтроллера, поэтому требуется их преобразование к напряжению логических уровней. Также необходимо учесть, что прерывание происходит по отрицательному фронту импульса. Функциональная схема устройства сопряжения сигналов датчика частоты с контроллером приведена на рис.4.4.
Рис.4.4. УСО датчика частоты
Конденсатор С и сопротивление R1, R2 образуют дифференцирующую цепочку, которая служит для задержки НЧ составляющих сигнала и постоянной составляющей. Сопротивления R1 и R2 образуют делитель напряжения для ограничения входного сигнала. Диод VD1 стабилизирует амплитуду импульсов на уровне +5В. Элемент D1 выполняет роль 1-разрядного АЦП, то есть компаратора. Сформированный таким образом цифровой сигнал поступает на вход прерывания контроллера. Блок сопряжения с датчиком скорости выполнен по аналогичной схеме, за исключением того, что так как выходная амплитуда датчика скорости 10 В, то требуется другое соотношение сопротивлений делителя напряжения R1 и R2. УСО для датчика напряжения представляет собой (рис.4.5.) делитель напряжения для приведения значения напряжения к уровню +5 В и ФНЧ для подавления помех и переменной составляющей с частотой среза порядка 10 Гц.
Рис.4.5. УСО датчика напряжения
Делитель напряжения образован сопротивлениями R1, R2. ФНЧ состоит из конденсатора C и сопротивления R1. Стабилитрон VD1 и диод VD2 служат для защиты входа АЦП от перенапряжения.
ВВЕДЕНИЕ
В наше время в связи с развитием электроники вообще и автомобильной электроники в частности ставится задача создания многофункционального прибора для учебного автомобиля, которая включает в себя задачи точного измерения и индикации параметров работы двигателя автомобиля и выработки рекомендаций для водителя. Актуальность выбора именно этой темы связана с увеличением автомобильного парка в стране; в данной ситуации такой прибор мог бы помочь многим начинающим водителям научиться правильно управлять автомобилем. Данный прибор должен измерять и отображать параметры работы двигателя, а также формировать рекомендации для водителя, в частности относящихся к правильному переключению коробки передач. Индикация должна быть простой и понятной начинающему водителю. В настоящее время существует множество систем, выполняющих функции системы цифровой индикации частоты вращения коленчатого вала; системы квазианалоговой индикации частоты вращения коленчатого вала с линейной шкалой, цифровых спидометров и прочее. Проведя детальный анализ этих типов систем, находим присущие им недостатки: Для аналоговых приборов очевидный недостаток - повышенная погрешность отображения, связанная как с погрешностью самой шкалы прибора, так и с инерционностью прибора. Для систем цифровой индикации частоты вращения коленчатого вала - неудобство использования, так как при вождении машины очень неудобно отслеживать изменения на цифровом индикаторе, кроме того, все рассмотренные аналоги измеряют число импульсов, что приводит к увеличению инерционности (время подсчета составляет порядка 1 сек с небольшими вариациями от системы к системе) и абсолютной погрешности в области низких частот вращения вала (при частоте 400 об/мин - частота холостого хода число импульсов равно 6 и погрешность приближается к цифре 17%). Для приборов квазианалоговой индикации частоты вращения коленчатого вала с линейной шкалой характерно объединение недостатков и тех и других. Исходя из этих данных можно заключить, что актуальным является решение вопроса, создания учебного прибора, выполняющей функции как цифрового, так и квазианалогового тахометра с учетом требований к точности измерения, а также удобству считывания информации. В данной работе примем ряд основных положений: . Разрабатываемый прибор должен быть смешанным (объединить систему цифровой и квазианалоговой индикации частоты вращения коленчатого вала), что приведет к уменьшению погрешности отображения и повышению наглядности отображения одновременно. . В разрабатываемом приборе должна быть уменьшена инерционность за счет применения другого метода измерения, а также применения различных методов сглаживания информации. . В разрабатываемом приборе должна быть существенно уменьшена погрешность измерения (особенно в области низких частот вращения коленчатого вала), что может быть достигнуто применением другого метода подсчета. При подсчете времени погрешность измерения уменьшается в области низких частот, но повышается в области высоких частот, но это не так критично, нам не необходимы особо точные значения в этой области. Поэтому необходимо предусмотреть разбиение диапазона измеряемых частот на несколько интервалов, и введение нелинейной шкалы для удобства отображения информации. . В прибор должны быть включены также функции измерения пройденного расстояния, скорости и расхода топлива, это повысит позволит эксплуатационные характеристики прибора при незначительном его усложнении и удорожании. . Обязательно введение функций выработки рекомендаций управлением автомобилем, таких как значение ступени передачи коробки передач, превышение скорости и пр.
АНАЛИЗ ТЕХНИЧЕСКОГО ЗАДАНИЯ
Прибор относится к устройствам, выполняющим в основном функции наблюдения. Определим параметры наблюдения и их характеристики.
Описание и модель прибора. Возможные режимы работы. Контролируемые параметры
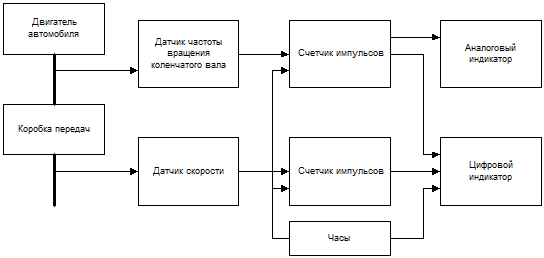
Тахометр, входящий в состав прибора, представляет собой счетчик измерительных импульсов датчика частоты вращения коленчатого вала автомобиля. Структурная схема системы представлена на рис.1.1.
Структурная схема тахометра прибора
Рис.1.1.
Измерение числа оборотов коленчатого вала и скорости движения автомобиля производится с помощью счетчиков импульсов, поступающих от соответствующих датчиков. Для индикации используется цифровой индикатор, а для наглядного представления информации о частоте вращения вала двигателя используется также квазианалоговый индикатор - шкала с логарифмическим масштабом. Работа счетчиков синхронизируется часами реального времени. К режимам работы прибора относятся: режим ожидания, режим измерения. В режиме ожидания система находится во время стоянки автомобиля и не производит никаких измерений. В режим измерения система переходит при замыкании замка зажигания автомобиля, то есть при включении двигателя. Контролируемые параметры и их значения приведены в таблице 1.1. К дополнительным функциям относятся возможность измерения пройденного автомобилем расстояния и измерение напряжения бортовой сети автомобиля.
Таблица 1.1. Контролируемые прибором параметры
Требования к качеству контроля
Основными функциональными частями прибора является тахометр и спидометр, так как на основании их измерений прибор формирует рекомендации по переключению скоростей. Для обеспечения надежности и достоверности отображения данных, а также для удобства использования тахометра определим требования к качеству контроля. Для этого проанализируем параметры некоторых используемых в настоящее время тахометров (таблица 1.2). Таблица 1.2. Сравнительные характеристики тахометров
многофункциональный прибор микроконтроллер датчик
|
Последнее изменение этой страницы: 2020-02-16; Просмотров: 160; Нарушение авторского права страницы
 [об/мин], (4.1)
[об/мин], (4.1) [об/мин]. (4.2)
[об/мин]. (4.2)

 9 (4.5)
9 (4.5)
 » 85 нФ
» 85 нФ