|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Принципы работы шагового двигателя
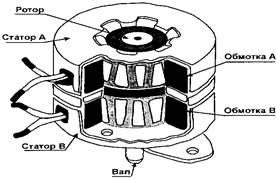
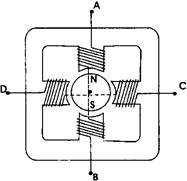
Существуют два основных типа шаговых двигателей, применяемых в практике: • с постоянным магнитом; • с переменным магнитным полем. Конструкция типичного биполярного шагового двигателя показана на рис. 1.2. Двигатели с постоянным магнитом бывают биполярными (рис. 1.3) и униполярными (рис. 1.4). Биполярные двигатели – наиболее простые для решения несложных задач. Они состоят из постоянного магнита вращающегося ротора и окруженного полюсами статора, состоящего из четырех обмоток. Протекание тока в обмотках статора возбуждает ротор, и при последовательной коммутации обмоток происходит ступенчатое вращение.
Рисунок 1.2 – Конструкция биполярного шагового двигателя
Рисунок 1.3 – Схема биполярного двигателя
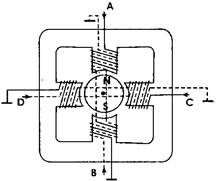
Рисунок 1.4 – Схема униполярного двигателя
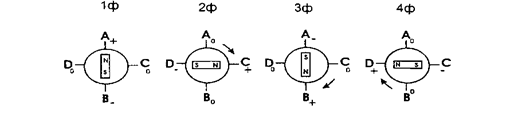
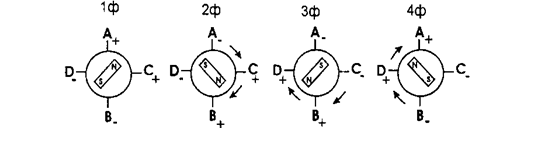
Для двигателя этого типа существует три метода возбуждения обмоток. • Возбуждение обмоток происходит в последовательности AB/CD/ BA/DC (ВА указывает на то, что обмотка АВ возбуждается в противоположном направлении). Эта последовательность известна под названием «одна фаза активна», «полный шаг» или «привод волны». В каждый момент возбуждается только одна из фаз (рис. 1.5).
Рисунок 1.5 – Последовательность возбуждения обмоток «одна фаза активна» • Возбуждение одновременно обеих фаз, чтобы ротор выровнялся между двумя положениями полюса. Такой метод называется «две фазы активны», «полный шаг». Это состояние является следующей последовательностью привода биполярного двигателя и дает самый высокий вращающий момент (рис. 1.6).
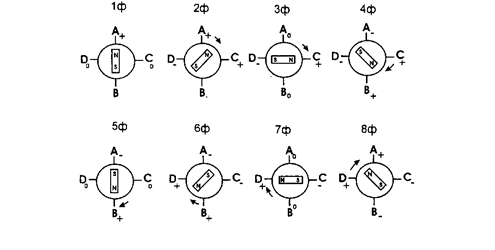
• Возбуждение одной фазы, потом – двух, потом – одной и т.д., чтобы ротор двигался поэтапно, вращаясь в квадранте. Эта последовательность известна как «ступенчатый метод половины». Полуволна имеет большой угол вращения за шаг двигателя, но слабый вращающий момент (рис. 1.7).
Рисунок 1.6 – Последовательность возбуждения обмоток «две фазы активны»
Для вращения в противоположном направлении (синхронизация прежняя) изменяется порядок возбуждения обмоток, на противоположный. Как показано на диаграммах, угол поворота ротора составляет 90°. Промышленные двигатели имеют больше полюсов и достигают угла поворота в несколько градусов, но число обмоток и последовательность привода остаются неизменными.
Рисунок 1.7 – Последовательность возбуждения обмоток «ступенчатый метод половины»
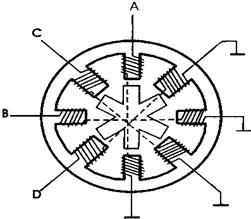
Униполярный двигатель с постоянным магнитом идентичен биполярному за тем исключением, что у него в каждой фазе используются две обмотки. Это необходимо для того, чтобы полностью изменить поток статора быстрее, чем в двунаправленном приводе (рис. 1.8).
Рисунок 1.8 – Схема униполярного двигателя с постоянным магнитом
Ротор выполняет тот же путь, что и у биполярного двигателя за тем исключением, что мостовые драйверы заменены простыми униполярными каскадами: четыре транзистора Дарлингтона, или счетверенные транзисторные матрицы Дарлингтона. Униполярные двигатели более дорогостоящие, поскольку у них – вдвое больше обмоток. Кроме того, их характеризует гораздо меньший вращающий момент при одинаковых габаритах, так как обмотки выполнены из более тонкого провода. Все двигатели с постоянным магнитом генерируют электромагнитные помехи ротором, который ограничивает скорость вращения. При очень высоких скоростях вращения необходим двигатель с переменным магнитным полем. Двигатель переменного магнитного поля оснащен ротором из нена-магниченного мягкого железа с меньшим количеством полюсов, чем статор (рис. 1.8). При этом используется униполярный метод возбуждения пары полюсов статора, чтобы повернуть ротор к полюсам возбуждаемой обмотки ступенчато. Здесь также используют три различных последовательности возбуждения фаз: • «одна фаза активна» – A/C/B/D; • «две фазы активны» – AC/CB/BD/DA; • «шаг-половина» – A/AC/C/BC/B/BD/D/DA. Заметим, что угол поворота ротора составляет 15°, а не 45°. В прошлом униполярные двигатели были более интересны для проектировщиков, поскольку имеют простой выходной каскад. Теперь, когда выпускаются монолитные драйверы напряжения, биполярные двигатели становятся более популярным. Для правильного генерирования импульса обмотки ШД необходим мостовой коммутатор тока обмотки. Такой коммутатор можно собрать на дискретных элементах.
|
Последнее изменение этой страницы: 2020-02-16; Просмотров: 150; Нарушение авторского права страницы