
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Характеристика транспортируемого груза
Наименование груза: тюки и ящики. Плотность груза: Размер груза: a < 600 мм. Характеристика условий работы конвейера Конвейер работает в помещении без отопления. Температура окружающей среды: от -30 °С до +30 °С. Характеристика трассы конвейера Длина транспортирования груза: L = 32 м. Высота подъема груза: Н = 2, 7 м. Скорость движения ленты v = 1, 6 м/с.
Наибольший допустимый угол подъема: β < 18°.
Расчет ленточного конвейера Определяем массовую расчетную производительность по формуле:
где КН = 1, 3 – коэффициент неравномерности загрузки; Кt = 0, 9 – коэффициент использования конвейера по времени; КГ = 0, 96 – коэффициент готовности конвейера. Определяем объемную производительность:
Основой конвейера служит гибкая бесконечная лента, которая в зависимости от типа роликоопор может иметь в поперечном сечении плоскую или желобчатую форму. Верхняя и нижняя ветви поддерживаются от провисания роликоопорами. Поступательное движение ленты сообщаются приводным барабаном, для постоянного натяжения ленты используют натяжное устройство (грузовое или винтовое). В схеме конвейера основными составляющими элементами являются: Н – высота подъема груза; β – угол подъема груза;
L1-2, L7-8 – горизонтальные проекции наклонных участков верхней и нижней ветви конвейера; L2-3 – длина горизонтального участка от точки перегиба нижней ветви конвейера до нижней точки на оборотном барабане; L4-5 – длина горизонтального участка от верхней точки на оборотном барабане до точки начала загрузки груза на верхней ветви конвейера; L5-6 – длина горизонтального участка от точки начала загрузки груза до точки конца загрузки на верхней ветви конвейера; L6-7 – длина горизонтального участка от точки конца загрузки груза до точки перегиба верхней ветви конвейера (рисунок 1).
Рисунок 3.22 – Схема ленточного конвейера Угол наклона конвейера принимаем β = 18°. Конвейер горизонтально наклонный. Предварительная ширина ленты определяется по формуле:
где
скорость движения ленты v = 1, 6 м/с. Ширину ленты выбираем из ряда значений: 400, 500, 650, 800, 1000, 1200, 1400 мм. Должно соблюдаться условие: где Поэтому принимаем ширину ленты В = 1400 мм = 1, 4 м. Выбираем ленту с 2-х сторонней резиновой обкладкой, для средних и малоабразивных грузов, для работы в диапазоне температур от -30 °С до +30 °С. Толщина наружной обкладки сверху 6 мм и снизу 2 мм. Толщина тканевой прокладки 1, 4 мм. Принимаем количество прокладок равное 3. Общая толщина ленты равна 6 + 3∙ 1, 4 + 2 = 12, 2 мм. Линейная нагрузка от массы ленты [24]:
где g = 9, 81 м/с2 – ускорение свободного падения; mл = 14 кг – масса 1 м2 конвейерной ленты; ширина ленты В = 1, 4 м. Линейная нагрузка от массы транспортируемого груза:
Определяем линейную нагрузку от вращающихся частей роликоопор. На верхней ветви:
На нижней ветви:
Общее сопротивление при установившемся движении ленты по всей трассе конвейера определяют по обобщенной формуле:
где KД = 2, 8 – коэффициент, учитывающий сопротивление в местах загрузки; Н = 3, 7 м – высота подъема груза; ω = 0, 04 – коэффициент сопротивления. В результате получаем
Определим мощность электродвигателя в приводе конвейера
где КЗ = 1, 2 – коэффициент запаса; В приводах конвейеров применение получили асинхронные электродвигатели общепромышленного исполнения серии 4А, характеристики которых приведены в таблице 3.24, где: Рн - номинальная мощность электродвигателя; nн - номинальная частота вращения вала электродвигателя; η н - КПД электродвигателя; cosφ - коэффициент мощности; Мmax/Mн - перегрузочная способность; Мп/Мн - кратность пускового момента; Iп/Ι н - кратность пускового тока.
Таблица 3.24 – Характеристики двигателей
Электродвигатель выбираем по расчетной мощности. Окончательно выбираем тип двигателя 4А160S6У3 с синхронной частотой вращения n = 1000 об/мин, мощностью 11 кВт. Определим максимальное натяжение ленты по следующей формуле:
Где μ = 0, 4 – коэффициент трения ленты по поверхности барабана; α = 180° = 3, 1416 рад – угол обхвата лентой барабана. Таким образом, максимальное натяжение ленты равно Выводы.
Индивидуальные задания
Винтовой конвейер
Принадлежит к конвейерам без гибкого тягового органа. Перемещение груза в трубе-желобе производится валом с ви-нтовыми лопастями.
Винтовой конвейер стационарный общего назначения включает винт (в качестве рабочего органа), неподвижный желоб, загрузочное и разгрузочное устройства и привод. Вал винта имеет концевые и промежуточные (подвесные) опоры. Одна концевая опора должна иметь упорный подшипник и располагаться так, чтобы от действующей осевой силы вал винта работал на растяжение. Схема винтового конвейера приведена на рисунке 3.23. Рабочей камерой винтового транспортера служит пустотелый цилиндр, внутри которого установлен винт (шнек).Приводное устройство шнека состоит из двигателя и ременной передачи. Вращающийся шнек перемещает мелкозернистые или мелкокусковые грузы вдоль пустотелого цилиндра от загрузочного к разгрузочному устройству.Винтовые конвейеры служат для перемещения пылевидных и мелкокусковых грузов в горизонтальной или наклонной (до 20°) плоскостях, реже в вертикальной плоскости. На рисунке 3.2 приведена схема винтового конвейера.
Рисунок 3.23– Схема винтового конвейера Винтовые конвейеры можно классифицировать по следующим признакам: 1) по виду трассы бывают горизонтальные, наклонные и вертикальные. 2) По значению угла наклона конвейеры бывают пологонаклонные, когда угол наклона β не превышает угла естественного откоса транспортируемого материала α и крутонаклонклонные, когда β > α . Основными элементами винтовых конвейеров являются винт с опорами, желоб, загрузочное и разгрузочное устройства и привод. Винт конвейера выполняется из трубы, к которой привариваются лопасти.
Длина горизонтальных винтовых конвейеров достигает 60 м, высота наклонных и вертикальных конвейеров – до 30 м, производительность до 100 т/ч. В качестве опор винтов применяют подшипники скольжения и качения. Упорный подшипник качения устанавливается на разгрузочном конце конвейера так, чтобы винт работал на растяжение. Желоб винтового конвейера изготавливают из листовой стали толщиной 3-6 мм. При транспортировке абразивных и горячих грузов желоб изготавливают из чугуна.К достоинствам винтовых конвейеров относятся компактность, простота конструкции и обслуживания, надежность в эксплуатации, удобство промежуточной разгрузки, герметичность и пригодность для транспортирования горячих, пылящих и токсичных материалов. Недостатками являются: повышенная энергоемкость, измельчение грузов в процессе транспортирования, повышенный износ винта и желоба, ограниченная длина, высокая чувствительность к перегрузкам, возможность образования заторов. В зависимости от конфигурации трассы различают винтовые конвейеры: горизонтальные или пологонаклонные под углом 20° (основной тип); крутонаклонные и вертикальные. Пример расчета винтового конвейера [20, 24] Рассчитать винтовой горизонтальный конвейер для перемещения сырого песка насыпной плотностью ρ = 1, 6 т/м3. Расчетная производительность конвейера Q = 40 т/ч, длина L = 20 м (рисунок 3.25). Принимаем отношение шага винта к его диаметру kD = 0, 8 (для абразивных материалов). В соответствии с ГОСТ 2037-82 принимаем частоту вращения винта nB = 40 об/мин, коэффициент заполнения желоба ψ = 0, 125.
Рисунок 3.25 – Размерные параметры и комплектующие винтового конвейера: 1 – двигатель; 2 – муфты; 3 – редуктор; 4 – загрузочный люк; 5 – желоб; 6 – винт; 7 – подшипник подвесной; 8 – разгрузочный люк
Необходимый диаметр винта
Здесь Q – расчетная производительность конвейера, т/ч; kD – отношение шага винта к его диаметру: для абразивных материалов kD = 0, 8, для неабразивных kD = 1, 0; nB – частота вращения винта, об/мин; ψ – коэффициент заполнения желоба; ρ – насыпная плотность груза, т/м3; kβ – коэффициент уменьшения производительности в зависимости от угла наклона конвейера. Для горизонтального конвейера принимаем kβ = 1. Необходимый диаметр винта
Принимаем kβ = 1, так как конвейер горизонтальный. По данным таблицы 3.25 назначаем диаметр винта D = 500 мм, шаг винта S = 400 мм (винт однозаходный).
Таблица 3.25 – Диаметр и шаг винта винтового конвейера (ГОСТ 2037-82)
Наибольшую допустимую частоту вращения (об/мин) винта рекомендуется определять из условия
где k = 30 – коэффициент; D – диаметр винта, м. Номинальную частоту вращения винта, согласно ГОСТ 2037-82, следует выбирать из ряда: 6; 7, 5; 9, 5; 11, 8; 15; 19; 23, 6; 30; 37, 5; 47, 5; 60; 75; 95; 118; 150; 190 об/мин. Допускается отклонение в пределах ± 10 %. Максимально допустимая частота вращения винта
Так как nB = 40 об/мин < Необходимая мощность на валу винта
Здесь Мощность на валу винта, потребляемая при работе конвейера
где w = 4 – коэффициент сопротивления движению груза. Мощность двигателя для привода конвейера
Здесь
Выводы.
Индивидуальные задания.
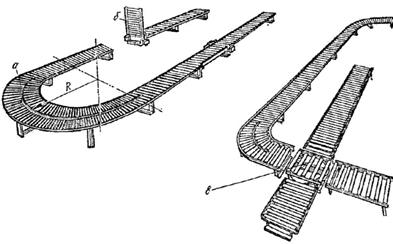
3.11.3. Роликовый конвейер Этот конвейерпредназначен для транспортировки штучных грузов. Он состоит из последовательно расположенных на раме вращающихся роликов, по которым перемещается груз. Трасса конвейера может быть прямо- или криволи-нейной. Роликовые конвейеры различают: · по типу привода: приводные – ролики приводятся в движение от двигателя, и неприводные; · по степени подвижности: стационарные или переносные и передвижные ( на колесах); · по направлению трассы: прямолинейные; прямолинейные с криволинейными участками; разветвляющиеся ( с переводными стрелками или поворотными кругами); · по конструкции рамы: со сплошной рамой или секционные. Неприводные роликовые конвейеры (рис. 3.26) выполняют стационарными, переносными и передвижными. Основными параметрами неприводных роликовых конвейеров (рольгангов) общего назначения являются: – длина ролика – 160–1200 мм; – диаметр ролика – 40–155 мм; – шаг роликов составляет 50–630 мм; – радиусы поворотных секций – 400–4000 мм. Неприводные роликовые конвейеры просты в эксплуатации, экономичны и отличаются удобством укладки и съема грузов; ширина ходовой части: 160, 250, 400 и 650 мм; диаметры дисков 40 и 60 мм; шаг установки 40, 80 и 160 мм. Неприводные роликовые конвейеры имеют пересечения и разветвления трассы подобно стрелке рельсовых путей. На криволинейных участках (повороты трассы) устанавливают по два раздельных цилиндрических или конических ролика. На неприводных роликовых конвейерах кроме цилиндрических используют дисковые ролики, самоустанавливающиеся по ходу грузов; шаровые опоры, обеспечивающие движение грузов в любую сторону.
а – стационарный однорядный; б – стационарный раздельный сдвоенный; в – сдвоенный с наклонными роликами для ци- линдрических грузов; г – с наклонными роликами (дисками) для труб; д – передвижной; е – передвижной раздвигающийся Рисунок 3.26 – Схемы неприводных роликовых Конвейеров Роликовый конвейер (рольганг) — транспортер, на котором перемещение грузов происходит по вращающимся роликам, оси которых укреплены на раме конвейера.
1–электродвигатель; 2 – редуктор; 3 – коническая передача; 4– ролики. Рисунок 3.27– Схема рольганга Рольганг собирается из отдельных секций длиной 2–3 м, используется для перемещения штучных грузов. Различают роликовые транспортеры приводные и неприводные. В приводных рольгангах вращение роликов осуществляется от электропривода, состоящего из двигателя и редуктора; движение передается через цепную или зубчатую передачу. В неприводных рольгангах груз перемещается под действием собственной массы (наклонные и спиральные) или под воздействием усилия оператора (горизонтальные). К недостаткам рольгангов относятся: невысокая производительность, нестабильность скорости движения, возможность остановки и самопроизвольного сбрасывания грузов, необходимость восстановления потерянной на наклонной трассе высоты. Неприводные конвейеры (рис.3.28) обычно гравитационные, у которых движущей силой является продольная составляющая веса груза, находящегося на роликах в наклонном положении вниз.
Рисунок 3.28– Схема гравитационного Роликового конвейера
Неприводные роликовые конвейеры бывают также однорядные (КРО) и многорядные ( КРМ), а ролики – цилиндрические и дисковые (рис.3.29).
Рисунок 3.29 – Дисковые ролики. Приводные роликовые конвейеры широко применяют в металлургической и деревообрабатывающей промышленности, в прокатных цехах, на заводах, производящих резку и раскрой листового и профильного металла, а также на складах готовой продукции (рис.3.30).
Рисунок 3.30 – Приводной роликовый конвейер
В приводных роликовых конвейерах вращение на все рабочие ролики передается от двигателя, поэтому классификация таких конвейеров производится по способу передачи на ролики движущей силы. Приводные роликовые конвейеры выполняют с групповым и индивидуальным приводом. При групповом приводе движение роликам передается продольным трансмиссионным валом, приводными цепями, клиновыми ремнями или лентой (рис.3. 31). Конвейеры такой конструкции применяются для тяжелых условий работы, они выполняются реверсивными и используются в металлургическом производстве для подачи металла к прокатным станам, плавильным и охлаждающим камерам. Тихоходный групповой привод устанавливают на конвейерах общего назначения для транспортирования легких, средних и реже тяжелых грузов.
Рисунок 3.31 –Ролики с групповым приводом а – передача от ролика к ролику; б – передача секциями; в – передача одной цепью Пример расчета роликового конвейера [20, 24, 25]. Рассчитать гравитационный роликовый конвейер с прямолинейной трассой для транспортирования металлических контейнеров массой m = 200 кг со скоростью v = 0, 5 м/с. Длина груза lГ = 1, 8 м, ширина bГ = 0, 6 м. Производительность конвейера Z = 250 шт/ч, длина конвейера L = 30 м. Условия работы средние. Производительность конвейера
Q = m·Z·10–3 =200 кг·250 шт/ч ·10–3 =50 т/ч.
Расстояние между грузами
Таблица 3.26– Рекомендуемый угол наклона гравитационных роликовых конвейеров
Выбираем угол наклона конвейера β = 2°. Шаг роликов должен составлять от 20 % до 45 % от длины груза, т.е. 0, 2∙ lГ ≤ Число роликов, на которых лежит груз z′ = lГ /
Таблица 3.27 – Средняя нагрузка
Средняя нагрузка на один ролик согласно таблице 2:
Таблица 3. 28 – Расчетная (статическая) нагрузка на ролики и размеры роликов неприводных конвейеров (ГОСТ 8324-71)
Согласно таблице 3.28 при нагрузке, приходящейся на один ролик 980 Н и длине ролика 650 мм, выбираем диаметр необработанного ролика D = 60 мм.
Таблица 3.29 – Масса роликов неприводных роликовых конвейеров
Согласно таблице 3.29, масса одного ролика Диаметр цапфы ролика лежит в диапазоне d = (0, 2…0, 25)∙ D = (0, 2…0, 25)∙ D = 12...15 мм. Принимаем d = 12 мм. Число роликов в конвейере z = L / tp = 30 м/0, 63 м = 47, 6 ≈ 48. Принимаем коэффициент трения качения груза по роликам μ =5∙ 10-4 м. Коэффициент трения в цапфах роликов примем для средних условий работы f = 0, 04 (ролики на подшипниках качения). Сопротивление движению одного груза определяем по формуле
Здесь k = 0, 8…0, 9 – коэффициент, учитывающий распределение массы вращающейся части ролика по его поперечному сечению. Коэффициент сопротивления движению груза на конвейере
При принятом угле наклона гравитационного конвейера β = 2° проверяем условие: tg β = tg 2° =0, 0349 > w = 0, 026. Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1719; Нарушение авторского права страницы
 = 1800 кг/м3.
= 1800 кг/м3. = 1, 3 м – шаг верхних роликоопор.
= 1, 3 м – шаг верхних роликоопор. = 3 м – шаг нижних роликоопор.
= 3 м – шаг нижних роликоопор. = 8, 9 кг – масса одной роликоопоры.
= 8, 9 кг – масса одной роликоопоры. т/час.
т/час. – максимальная массовая производительность;
– максимальная массовая производительность;  м3/час.
м3/час. – шаг верхних роликоопор;
– шаг верхних роликоопор;  – шаг нижних роликоопор;
– шаг нижних роликоопор; 
 м,
м,  м3/час – расчетная объемная производительность конвейера;
м3/час – расчетная объемная производительность конвейера;  = 300 – расчетный коэффициент для плоской ленты;
= 300 – расчетный коэффициент для плоской ленты;  = 0, 9 – коэффициент угла наклона конвейера;
= 0, 9 – коэффициент угла наклона конвейера;  мм,
мм,  = 600 мм – наибольший размер тюка или ящика.
= 600 мм – наибольший размер тюка или ящика. Н/м.
Н/м. Н/м.
Н/м. Н/м.
Н/м. Н/м.
Н/м. ,
,  Н.
Н. кВт,
кВт,  = 0, 95 – КПД привода конвейера.
= 0, 95 – КПД привода конвейера. Н.
Н. Н.
Н. , т/час
, т/час


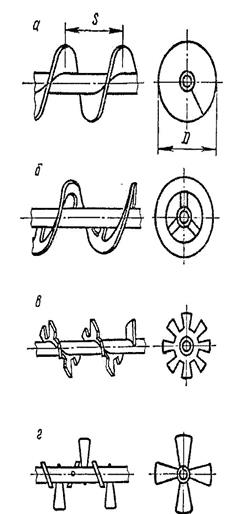 Рисунок 3.24 – Конструкции винтов
Рисунок 3.24 – Конструкции винтов

 , м.
, м. .
. ,
,  об/мин.
об/мин. об/мин, условие выполняется.
об/мин, условие выполняется. , кВт.
, кВт. – длина горизонтальной проекции конвейера, м; w – коэффициент сопротивления перемещению груза. Так как у горизонтального конвейера
– длина горизонтальной проекции конвейера, м; w – коэффициент сопротивления перемещению груза. Так как у горизонтального конвейера  , получаем
, получаем  .
. .
. .
. – коэффициент запаса; η = 0, 96 – КПД механизма.
– коэффициент запаса; η = 0, 96 – КПД механизма.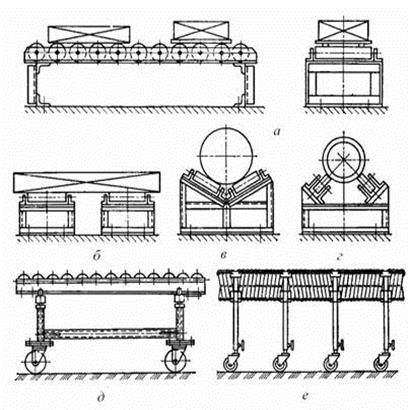



 .
. ≤ 0, 45∙ lГ. Таким образом, 360 мм ≤
≤ 0, 45∙ lГ. Таким образом, 360 мм ≤  на ролик, Н
на ролик, Н 


 .
. = 4, 8 кг.
= 4, 8 кг.

 .
. .
.