
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ПО ТЕХНИЧЕСКОМУ ИСПОЛЬЗОВАНИЮСтр 1 из 8Следующая ⇒
Министерство транспорта Российской Федерации Федеральное государственное образовательное учреждение Государственная морская академия имени адмирала С.О. Макарова
Кафедра радионавигационных приборов и систем
А.Н. МАРИНИЧ
ПРАКТИЧЕСКОЕ РУКОВОДСТВО ПО ТЕХНИЧЕСКОМУ ИСПОЛЬЗОВАНИЮ СУДОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ BridgeMaster СЕРИИ Е
Санкт-Петербург УДК 621.396.967: 629.12 М26
Маринич А.Н.
М26 Практическое руководство по техническому использованию судовой радиолокационной системы BridgeMaster серии Е. - СПб.: ГМА им.адм. С.О.Макарова, 2003. - 46с.
Практическое руководство содержит основные сведения по построению, комплектации, техническим характеристикам, управлению и проверке работоспособности радиолокационной системы BridgeMaster серии Е, которая широко используется на морских судах. В руководстве представлены и очень кратко описаны основные функции управления радиолокационной системой. Для проверки правильности и корректности работы системы приведены основные правила по проверке работоспособности системы и использовании системы встроенного контроля, приводятся процедуры тестирования монитора, правила замены магнетрона. Большое количество функций и возможностей системы предполагает поэтапное изучении системы и освоение функций как на компьютерных имитаторах, так и на действующей станции.
Рекомендовано для курсантов старших курсов и студентов заочного обучения радиотехнического, арктического, судоводительского факультетов.
Практическое руководство рассмотрено и рекомендовано к изданию на заседании кафедры радионавигационных приборов и систем. Протокол № 5 от 31.01.2003 г.
Введение Постоянное развитие и усовершенствование радионавигационной аппаратуры привели к тому, что большинство достаточно новых радиолокационных станций не справляется с возрастающими международными и национальными требованиями. Введенная в мае месяце в 2000 г. новая редакция Главы 5 Конвенции СОЛАС предъявляет новые требования к составу аппаратуры судна. Используемые ранее радиолокационные станции (РЛС) и средства радиолокационной прокладки (САРП) в настоящее время по степени автоматизации выполняемых функций делятся на РЛС, САРП, средство автосопровождения (САС), средство электронной прокладки (СЭП). На судах появились новые системы: система регистрации данных рейса " черный ящик", аппаратура автоматической системы опознавания судов (АИС), система приема звуковых сигналов. Согласно рекомендациям ИМО (IMO) А.477(7) и резолюции MSC{64}(67) - прил. 4 разработаны национальные технико-эксплуатационные требования (ТЭТ) департамента морского транспорта ДМТ 29/53-02 к радиолокационному оборудованию морского судна. Данные национальные требования относятся также к судам смешанного плавания при нахождении в море. В соответствии с этими документами на всех судах водоизмещением более 300 рег. т должна быть установлена радиолокационная станция трехсантиметрового диапазона и СЭП (EPA), на судах свыше 500 рег. т вместо СЭП устанавливается САС (АТА), на судах свыше 3000 т — устанавливается вторая радиолокационная станция которая, согласно решению национальной администрации, может быть десятисантиметрового диапазона. САРП (ARPA) устанавливается на всех судах свыше 3000 т. Если судно имеет водоизмещение более 10000 рег. т, то оно должно быть оборудовано вторым САС (АТА). Изменяются требования и к индикаторам радиолокационных станций. Радиолокационную информацию на индикаторном устройстве теперь должны иметь возможность наблюдать как минимум два судоводителя, поэтому использование тубусов становится недопустимым. Поскольку современные дисплеи индикаторов имеют прямоугольную форму, предусматривается традиционное представление радиолокационной информации в виде радиально-круговой развертки. При этом диаметр вписанной в прямоугольник дисплея окружности или эффективный диаметр экрана должен составлять не менее 180, 250 и 340 мм для судов водоизмещением свыше 150, 1000 и 10000 тонн соответственно. Становятся обязательными шкалы дальности: 0.25; 0.5; 0.75; 1.5; 3; 6; 12; 24 морские мили. Предусматривается приоритет радиолокационного изображения перед электронной картой, а также автоматический и ручной ввод скорости с точностью не менее 0, 2 узла. Вводятся некоторые изменения в требования к САРП и новые требования к САС, СЭП. Радиолокационная система BridgeMaster серии Е одна из современных систем выпускаемых фирмой Litton Marine Systems для судов морского и речного флота. В зависимости от тоннажа судна и установки система представляет собой радиолокационную станцию и индикаторное устройство, такое как САРП, САС или СЭП. Она отвечает всем международным и национальным требованиям и является продолжением серии I (1992 г.), серии II (1995 г.), серии VT. Структура системы Радиолокационная система BridgeMaster серии Е представляет собой антенно-поворотное устройство с антенной трехсантиметрового (X-band) или десятисантиметрового (S-band) диапазона, соответствующий приемопередатчик и индикаторное устройство, выполняющее функции СЭП, САС или САРП. Индикаторное устройство состоит из блока процессорной электроники, панели управления и непосредственно монитора. Для подключения к бортовой сети на судне используется сетевой изолятор (сетевой выключатель) и изолирующий трансформатор. В зависимости от комплектации на конкретном судне система может комплектоваться одним или несколькими приемопередатчиками с антеннами, одним или несколькими индикаторными устройствами, как показано на рис. 1. При использовании трехсантиметрового диапазона система может комплектоваться различными антеннами размахом 2.4, 1.8, 1.2 м, для десятисантиметрового диапазона ─ 3.7 и 2.7 м. Выбор антенн зависит от требуемой разрешающей способности, наличия свободного места для размещения, тоннажа судна. Антенно-поворотное устройство непосредственно связано с приемопередающим устройством и располагается в едином корпусе с антенной (надпалубное расположение). Скорость вращения антенны при установке системы может быть различна, что связано с требованиями к оборудованию высокоскоростных судов. В отдельных случаях приемопередающее устройство может иметь подпалубное расположение. В этом случае антенно-поворотное устройство располагается совместно с антенной, а приемопередатчик ─ в отдельном помещении. Между собой они соединяются волноводными линиями и кабелем. Антенна десятисантиметрового диапазона также может иметь различные размеры и различное размещение своего десятисантиметрового приемопередатчика (надпалубное и подпалубное). Приемопередатчик соединяется с индикаторным устройством двумя кабелями непосредственно.
Рис. 1. Комплектация оборудованием радиолокационной системы BridgeMaster серии Е При использовании двух приемопередатчиков и, соответственно, двух антенн требуется блок коммутации (двухсторонний переключатель), к которому может быть подключено или два, или до восьми приемопередатчиков и от двух до восьми индикаторных устройств. При работе нескольких индикаторных устройств одновременно одно устанавливается ведущим устройством (управляющим приемопередатчиком с антенно-поворотным устройством), другие ─ ведомыми. Индикаторное устройство напольного или настольного исполнения. Панель управления индикаторного устройства содержит манипулятор и устройство считывания картриджей электронных карт. По отдельному заказу система может быть укомплектована специальной клавиатурой управления. Манипулятор, как правило, представлен в виде джойстика, трекбола (шарового манипулятора) или манипулятора " мыши". Дисплей индикаторного устройства представляет собой компьютерный монитор высокого (1365х1024 элементов) или среднего (1024х768 элементов) разрешения. В дисплей встроена система автоматического размагничивания кинескопа, что может быть замечено в виде периодического вздрагивания изображения. Для реализации большинства выполняемых функций с системой сопрягаются лаг и гирокомпас, без наличия которых правильное функционирование устройства ─ невозможно. Система может сопрягаться с радионавигационной системой, электронными картами, авторулевыми и другими навигационными приборами. Предусмотрено подключение аварийной сигнализации, реализована функция контроля за работоспособностью штурмана (включение аварийной сигнализации при временном отсутствии сигналов управления). Выключатель сети располагается в центре панели управления, не вызывая полного обесточивания системы. Дополнительно может быть установлена антенна системы контроля общей работоспособности для внешней проверки всех основных узлов по собственному излучаемому сигналу. Установка, обслуживание и ремонт производятся специализированными центрами при соответствующем обслуживании. Сервисные центры имеют специальные пароли для входа в программное обеспечение и поэтому внутренние установки, обновление и дополнение программного обеспечения может быть осуществлено только с разрешения фирмы изготовителя в соответствии с информационными извещениями. Характеристики приемника В приемнике используется логарифмическая характеристика усиления. На входе приемника установлен малошумящий каскад. Имеется ручная и автоматическая настройка частоты. Промежуточная частота ─ 60 МГц. Ширина полосы пропускания: 20 МГц (короткий и средний импульс) и 3 МГц (длинный импульс). Динамический диапазон приемника ─ 80 дБ. Характеристики передатчика Частота магнетрона: 9410 +/- 30 МГц ─ для трехсантиметрового передатчика (Х-band); 3050 +/-10 МГц ─ для десятисантиметрового передатчика (S-band). Импульсная мощность: 10 кВт или 25 кВт; 30 кВт. Длительность импульса / частота повторения: 0, 05 мкс / 1800 Гц ─ короткий импульс; 0, 25 мкс / 1800 Гц ─ средний импульс; 0, 75 мкс / 785 Гц ─ длинный импульс. Выполняемые функции Общие выполняемые функции для любых модификаций индикатора приведены в табл. 5. Таблица 5
Выполняемые функции в зависимости от исполнения индикаторного устройства приведены в табл. 6. Таблица 6
Управление системой Включение и выключение системы при поданном бортовом питании (сетевой рубильник) производится выключателем On/Off , расположенным на передней панели индикатора. Все последующие переключения для управления системой производятся установкой курсора на экране индикаторного устройства и нажатием правой и левой клавиши манипулятора. Курсор, находящийся внутри круга, в котором выводится радиолокационное изображение, представлен в виде крестика (прицела), вне круга ─ в виде стрелки. При расположении курсора вне круга изображения и наведении его на прямоугольник с наименованием (функцией) рядом со стрелкой появляются два небольших прямоугольника, представляющих левую и правую клавиши управления. Если один или оба прямоугольника залиты белым цветом, это указывает, что активизирована одна или обе клавиши соответственно. После включения системы в центре экрана появится надпись: RADAR WARMING UP PLEASE WAIT в центре в течение около30 с. nnn - счетчик таймера (времени прогрева), указывающий время прогрева приемопередатчика. По окончании прогрева система переходит в режим ожидания, о чем свидетельствует надпись в центре экрана. RADAR STANDBY Внешний вид изображения на экране представлен на рис. 2.
Из режима STANDBY имеется доступ к следующим функциям: регулировка яркости, изменение параметров курсора, выбор диапазона (при наличии приемопередатчиков), ввод данных, согласование с лагом и гирокомпасом, выбор режима ориентации изображения, выбор режима движения, управление подвижными и неподвижными метками дальности, выбор навигационных режимов, создание и занесение в память навигационных карт, работа с функциями СЭП/САС/САРП, установка сигнализации, системные установки. AZI ERR LOW VIDEO COMPASS MISSING HL TRIG ERROR
BUZZER OFF ─ включение звуковой сигнализации; WATCH ALARM OFF ─ установка интервала сигнализации. Перечень предупредительных сигналов, расположенных в приоритетном порядке дан в табл. 8.
Таблица 8
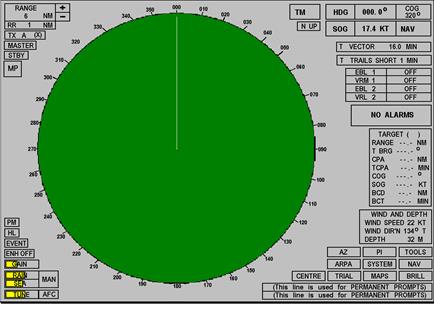
Работа в режиме излучения Переход в режим осуществляется наведением курсора на надпись TRANSMIT и нажатием левой клавиши. При этом изображение на экране изменится (рис. 3.), включится вращение антенны и излучение. Однако часть настройки системы производится в этом режиме.
Рис. 3. Внешний вид изображения на экрана индикатора в режиме TRANSMIT
MP - переключение длительности LP (большая) MP ( средняя) SP (малая ) поочередно в зависимости от выбранной шкалы дальности.
Управление векторами
T TRAILS SHORT 1 MIN (нижняя надпись), T TRAILS ─ траектория прошлого движения в истинном движении; R TRAILS ─ траектория прошлого движения в относительном движении; SHORT ─ короткое время прошлого движения; LONG ─ длинное время прошлого движения; PERM ─ постоянное свечение траектории (до 99 мин); OFF ─ выключение режима; RESET ─ сброс счетчика, сохранение режима, очистка экрана; 1 MIN ─ время сохранения траектории прошлого движения. При выборе времени сохранения траектории, должны соблюдается значения, приведенные в табл. 9. Таблица 9
Первая строка надписи является управляющей, и при наведении на неё курсора вызывается подменю выбора: OWN POSITION (NAV) ─ позиция судна; WAYPOINT DATA ─ данные точки назначения; WIND AND DEPTH ─ ветер и глубина; POT & RUDDER ANGLE ─ скорость поворота и угол перекладки руля.
WPT nnn T BRG nnn° ─ номер и пеленг на точку назначения; DTG nn.n NM ─ расстояние до этой точки в морских милях; XTD (n) n.nn NM ─ величина отклонения; TTG nn: nn ─ время на переход в часах и минутах.
Для установки скорости поворота и угла перекладки руля используется подменю ROT & RUDDER ANGLE, где вводятся значения скорости поворота и угла перекладки руля конкретного судна, на который устанавливается система. Настройка видеосигнала (в левом нижнем углу экрана, рис.3).
Настройка приемопередатчика (в левом нижнем углу экрана).
Настройка курсовой линии
EVENT ─ запись траектории судна или цели. Решаемые задачи (различные для ARPA, ATA, EPA). В зависимости от тоннажа судна и комплектации (как указывалось в технических характеристиках), система может выполнять функции средства электронной прокладки ( EPA), средства автоматического сопровождения (ATA), средства автоматической электронной прокладки ( ARPA ) ссоответствующими возможностями. Система сама определяет возможности, и в зоне выполняемых функций (левая нижняя часть экрана, рис. 3) вместо функции ARPA высветится EPA (средство электронной прокладки). При использовании EPA наблюдается только полуавтоматическое сопровождение цели (ПАС) ─ определение формуляра целей по двум, указанным оператором точкам. ПАС цель может иметь номера с первого по десятый. Первые 12 с после засечки первой точки отводится на коррекцию ее места. Через 30 с необходимо произвести вторую засечку цели. Если вторая засечка цели не произведена в течении 10 мин, то включается предупредительная сигнализация PLOT UPDATE (обновление данных) и аварийный сигнал PLOT INTERVAL (интервал занесения данных). Данные и вектора сбрасываются, если: расстояние превышает 48 миль или менее 0, 5 миль; последнее обновление данных более 15 мин; неисправность гирокомпаса; переключение режима стабилизации изображения; переход в режим ожидания ( RADAR STANDBY ). При этом на экране появляются символы: ╬ ─ пересечение курсов (мигание символа, аварийный сигнал, надпись BOW CROSSING). D ─ CPA дистанция кратчайшего сближения меньше заданной или TCPA время кратчайшего сближения меньше заданного (мигание символа, аварийный сигнал, надпись CPA/TCPA). Данные о цели (формуляр) Данные о цели указываются в окне формуляра.
TIME n.n MIN ─ время последнего ввода точки; RANGE nn.n NM ─ дистанция до цели; T BRG nnn.n ° ─ пеленг на цель; CPA nn.n NM ─ дистанция кратчайшего сближения; TCPA nn.n MIN ─ время кратчайшего движения; CSE nnn.n ° ─ курс цели (CSE/COG ─ относительный/абсолютный); STW nn.n KT ─ скорость цели (STW/SOG ─ относит./абсол.); BC nn.n NM nn MIN ─ расстояние и время до пересечения маршрутов.
Пределы CPA, TCPA, BC могут быть изменены.
GZ (на месте AZ рис. 3). Охранные зоны (только две) доступны во всех диапазонах, отображаются только на шкалах 3, 6, 12 миль, вызывают срабатывание сигнализации при наличии в них целей. После 60 срабатываний выдается аварийный сигнал ZONES FULL (заполнение зоны).
GUARD ZONES ─ меню охранных (кольцевых) зон; ZONE 1 ON ─ состояние первой зоны; ZONE 2 OFF ─ состояние второй зоны;
Автоматический захват и автоматическое сопровождение цели (ATA/ARPA) Захват целей возможен на дистанциях более 0, 25 морских миль (приближающаяся цель на расстояние менее 0, 25 морских миль переводится в режим счисления пути DR ). При сопровождении нескольких близкорасположенных целей может наблюдаться явление обмена сопровождаемыми целями. Явление обмена сопровождаемыми целями уменьшается методом демпфированного прогноза курса. При сопровождении каждой цели присваиваются символы цели, которые имеют следующий вид(в порядке приоритета): ◊ ─ потеря опорной цели LOST REF (три необнаружения при трех смежных оборотах антенны); ╬ ─ цель пересекает курс собственного судна BOW CROSSING; ∆ ─ дистанция кратчайшего сближения CPA и время кратчайшего сближения TCPA меньше заданных оператором значений (также срабатывает предупредительная сигнализация CPA/TCPA ); Ñ ─ цель входит в зону автоматического захвата (сигнализация AZ ENTRY ); ▼ ─ цель выходит из зоны автоматического захвата (сигнализация AZ EXIT ); ◊ ─ сброс цели с автоматического сопровождения (шесть необнаружений при шести смежных оборотах антенны) ( LOST TARGET ).
Ручной захват Ручной захват возможен на дальности от 0, 5 морских миль. 40 целей может быть захвачено вручную. Им присваиваются номера по порядку с 1 до 40. Пробелы в нумерации целей означает потерю или отмену целей. Символ ручного захвата цели ─ пунктирный квадрат на экране.
AZ З она автозахвата возможна на дальности от 0, 75 до 96 морских миль. Для включения и выключения зоны захвата вызывается раскрываемое меню:
ANNULAR: ─ кольцевые зоны; ZONE 1 ON ─ включение первой зоны автозахвата; ZONE 2 OFF ─ включение второй зоны автозахвата; POLYGONAL ─ многоугольные зоны; ZONE 3 OFF ─ включение третьей зоны автозахвата; ZONE 4 OFF ─ включение четвертой зоны автозахвата;
EXIT ACQ ZONES ─ выход из меню автозахвата;
Редактирование кольцевой зоны производится графически. Дальность размещения зоны устанавливается изменением внутреннего кольца зоны. Глубина зоны устанавливается по внешнему кольцу зоны. Изменение угла зоны производится по одной из границ зоны и позволяет установить зону угловым размером от 6 град до полного кольца.
Данные о цели (формуляр) Формуляр размещается вправой средней части экрана.
RANGE nn.n NM ─ дистанция до цели; T BRG nnn.n ° ─ пеленг на цель; CPA nn.n NM ─ дистанция кратчайшего сближения; TCPA nn.n MIN ─ время кратчайшего движения; CSE nnn.n ° ─ курс (CSE/COG ─ относит./абсолютный); STW nn.n KT ─ скорость (STW/SOG ─ относит./абсолютная); BCR nn.n NM ─ расстояние до точки пересечения маршрутов; BCT nn MIN ─ время до точки пересечения маршрутов. Пределы параметров CPA, TCPA, BCR, BCT (дистанция и время кратчайшего сближения, расстояние и время до точки пересечения маршрутов) могут быть изменены. Изменение порядка представления данных о целях производится в подменю TARGET, где возможны следующие варианты: ─ SINGLE TARGET - цели представляются в порядке их обнаружения; ─ MULTI TARGET BY CPA - представление целей в порядке возрастания дистанции кратчайшего сближения; ─ MULTI TARGET BY RANGE - представление целей в порядке ближайшего расположения; ─ MULTI TARGET (USER) - предоставление целей в порядке, определенном пользователем (до шести целей).
Функции ARPA/ATA/ETA
В конфигурации ETA все слова TARGET заменяются на PLOT. Раскрываемое окно ARPA имеет вид:
ARPA ─ вид в конфигурации; ARPA DATA ON ─ вкл. и выкл. функций САРП; NAME TARGET ─ присвоение имен целям; TARGET ID BOTN ─ идентификатор цели ( OFF, Number, Name, Both ─ оба); AUTODROP OFF ─ сброс неопасных целей ( ON/OFF ); VECTOR TIMEOUT ON ─ сброс несоответствия вектора (ЛИД или ЛОД) режиму ИД или ОД; OS VECT ARROW ON ─ включение стрелки на конце вектора; PAST POSN 1 MIN ─ включение траектории прошлого движения (шаг 0, 25; 0, 5; 1; 2; 4; 8; 16 мин); TRAC REPAIR ─ прошлое движение; TEST TARGET ─ включение имитатора целей; NMEA TARGET ALL ─ передача данных о целях (недоступна); TRK TARGET 0 ─ количество отслеживаемых целей;
EXIT ARPA ─ выход из подменю ARPA; Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 2815; Нарушение авторского права страницы
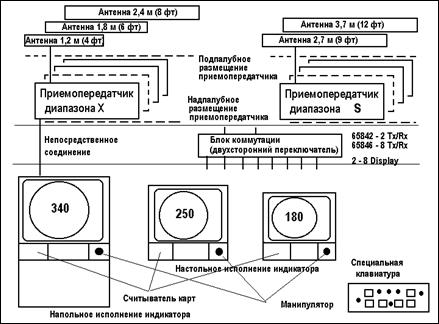
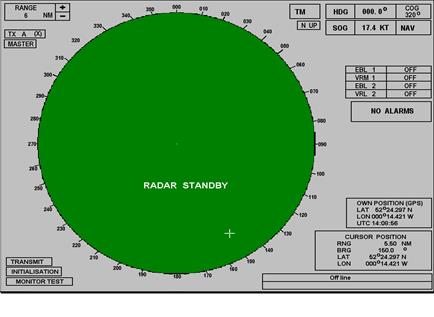 Рис. 2. Внешний вид изображения на экрана индикатора в режиме STANDBY
Рис. 2. Внешний вид изображения на экрана индикатора в режиме STANDBY 
 Для возврата в режим STANDBY необходимо нажать соответствующую клавишу курсором в правой верхней части экрана.
Для возврата в режим STANDBY необходимо нажать соответствующую клавишу курсором в правой верхней части экрана. Переключение длительности импульса
Переключение длительности импульса  T (TRUE) R (RELATIVE) VECTOR вектор истинного или относительного движения 16.0 MIN время вектора 16, 0 мин.
T (TRUE) R (RELATIVE) VECTOR вектор истинного или относительного движения 16.0 MIN время вектора 16, 0 мин.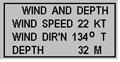 В левой нижней части изображения на экране на месте размещения окна " Положение судна по радионавигационной системе OWN POSITION" может быть размещено окно WIND AND DEPTH (ветер и глубина). Где WIND SPEED nn KT ─ скорость ветра (уз); WIND DIR'N nnn° T ─ направление ветра (град); DEPTH nn M ─ глубина (м) от навигационных датчиков.
В левой нижней части изображения на экране на месте размещения окна " Положение судна по радионавигационной системе OWN POSITION" может быть размещено окно WIND AND DEPTH (ветер и глубина). Где WIND SPEED nn KT ─ скорость ветра (уз); WIND DIR'N nnn° T ─ направление ветра (град); DEPTH nn M ─ глубина (м) от навигационных датчиков. Для работы с путевыми точками используется подменю WAYPOINT DATA где:
Для работы с путевыми точками используется подменю WAYPOINT DATA где:  WAYPOINT DATA ─ данные точки назначения;
WAYPOINT DATA ─ данные точки назначения;  ENH OFF ─ включение ON и выключение OFF дополнительного усиления; GAIN ─ регулировка усиления; RAIN ─ регулировка помех от дождя (в дальней зоне); MAN ─ ручное ( MAN ) или автоматическое ( AUTO ) управление; SEA ─ компенсация помех от моря (в ближней зоне).
ENH OFF ─ включение ON и выключение OFF дополнительного усиления; GAIN ─ регулировка усиления; RAIN ─ регулировка помех от дождя (в дальней зоне); MAN ─ ручное ( MAN ) или автоматическое ( AUTO ) управление; SEA ─ компенсация помех от моря (в ближней зоне). TUNE AFG ─ ручная ( MAN ) или автоматическая подстройка гетеродина ( AFG ), уровень настройки регулируется курсором при активированной линейке ( TUNE желтое свечение) при выборе ручного режима ( MAN ).
TUNE AFG ─ ручная ( MAN ) или автоматическая подстройка гетеродина ( AFG ), уровень настройки регулируется курсором при активированной линейке ( TUNE желтое свечение) при выборе ручного режима ( MAN ). Переключение - HL ─ курсовая линия (всегда ноль при Head-Up - ориентация по курсу); SL ─ кормовая линия. Временное отключение при удержании кнопки переключения.
Переключение - HL ─ курсовая линия (всегда ноль при Head-Up - ориентация по курсу); SL ─ кормовая линия. Временное отключение при удержании кнопки переключения. PLOT nn ─ номер цели;
PLOT nn ─ номер цели;  Охранные зоны ( только для ETA )
Охранные зоны ( только для ETA ) 
 EXIT GUARD ZONES ─ выход из меню охранных зон;
EXIT GUARD ZONES ─ выход из меню охранных зон; 
 EDIT 1 EDIT 2 ─ выход из редактирования первой и второй кольцевой зоны.
EDIT 1 EDIT 2 ─ выход из редактирования первой и второй кольцевой зоны. Зона автозахвата
Зона автозахвата  AUTO ACQ ZONES ─ зона захвата;
AUTO ACQ ZONES ─ зона захвата; 

 EDIT 1 EDIT 2 ─ редактирование кольцевой зоны;
EDIT 1 EDIT 2 ─ редактирование кольцевой зоны;  EDIT 3 EDIT 4 ─ редактирование многоугольной зоны.
EDIT 3 EDIT 4 ─ редактирование многоугольной зоны. TARGET nn/name ─ номер и имя цели, вызов подменю;
TARGET nn/name ─ номер и имя цели, вызов подменю;  В зависимости от конфигурации системы в правом углу экрана размещается клавиша ARPA, ATA или ETA , что позволяет вызвать дополнительные функций соответствующего назначения.
В зависимости от конфигурации системы в правом углу экрана размещается клавиша ARPA, ATA или ETA , что позволяет вызвать дополнительные функций соответствующего назначения.
