|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Структура цифровых систем управления
Интегральная схема (микросхема) — это микроэлектронное изделие, выполняющее определенную функцию преобразования и обработки сигналов и имеющее высокую плотность упаковки электрически соединенных элементов (или элементов и компонентов) и (или) кристаллов, которые рассматривают как единое целое. Цифровая интегральная микросхема (цифровая микросхема) — интегральная схема, предназначенная для преобразования и обработки сигналов, изменяющихся по закону дискретной функции. Большая интегральная схема (БИС) — интегральная схема, которая применяется при построении наиболее сложных средств обработки информации. Микропроцессор — программно-управляемое устройство, непосредственно осуществляющее процесс обработки цифровой информации и управление им, построенное на одной или нескольких БИС. Регистр — функциональный узел, предназначенный для приема, хранения и выдачи коротких последовательностей двоичных знаков, объединенных общим признаком (например, кодом команды и др.). Память — функциональная часть ЭВМ, предназначенная для запоминания и (или) выдачи данных. Запоминающее устройство (ЗУ) — изделие, реализующее память. Оперативное запоминающее устройство (ОЗУ) — ЗУ с изменяемым в процессе выполнения программы содержимым памяти. Постоянное запоминающее устройство (ПЗУ) — ЗУ с неизменным содержимым памяти. Интерфейс — средство стандартного сопряжения (соединения) устройств, отличающееся унификацией способов и средств физического соединения и процедур установления связи, обмена и завершения передачи информации. Архитектура — совокупность общих принципов построения и характеристик технических и программных средств обработки данных, определяющих функциональные и эксплуатационные параметры изделия и существенных для организации его эффективного применения. Структура — упорядоченное множество объектов и отношений между ними. Вычислительная система (ВС) — совокупность нескольких ЭВМ с обобщенными или индивидуальными периферийными устройствами, взаимно координирующих свою работу при решении одной или различных задач и воспринимаемых каждым из пользователей как функциональное единое целое. Мини-ЭВМ— малая вычислительная машина, имеющая широкое применение благодаря небольшим габаритным размерам, низкой стоимости, относительно высокой производительности. МикроЭВМ — ЭВМ, состоящая из микропроцессора, полупроводниковой памяти, средств связи с периферийными устройствами и при необходимости пульта управления и источника питания, объединенных общей несущей конструкцией. Управляющая микроЭВМ — микроЭВМ, которая использует данные (информацию) о процессе и вырабатывает выходные сигналы, управляющие работой объектов, участвующих в этом процессе. Виртуальная ЭВМ— функциональный эквивалент вычислительной машины, внешних устройств и программного обеспечения, эмулируемый на конкретной вычислительной системе. Эмуляция — имитация функционирования одной системы средствами другой системы без потери функциональных возможностей или искажения получаемых результатов. Программа — алгоритм преобразования данных в форме последовательности команд ЭВМ. Команда — указание, определяющее один шаг в общем процессе выполнения программы. Данные — информация, представленная в формализованном виде и предназначенная для обработки ее техническими средствами (например, ЭВМ) или уже обработанная ими. Файл — набор логически связанных данных. Принимая во внимание приведенную ранее терминологию, рассмотрим структуру цифровых систем управления При создании систем автоматического управления с микро-ЭВМ принципиально возможны два направления. Первое направление связано с использованием центральных управляющих микроЭВМ. Подобные системы можно применять для управления сложными объектами или группами объектов при комплексной автоматизации в различных отраслях промышленности и сельского хозяйства (металлургической, химической, тепличном овощеводстве, птицеводстве и др.). Общая структурная схема автоматической системы с микро-ЭВМ представлена на рис. 13.9. Система содержит ряд входных Вх.П1, Вх.П2, ..., Вх.Пk и выходных Вых.П1, Вых.П2, ..., Вых.Пk преобразователей, обменивающихся сигналами управления с микроЭВМ по шине управления в процессе преобразования данных. С выходных преобразователей сигналы поступают к исполнительным устройствам ИУ1, ИУ2, ..., ИУk, воздействующим на объект (или объекты) управления (ОУ). Рассматриваемая система может быть связанной многомерной, если имеет место управление сложным многомерным объектом, и несвязанной многомерной, если осуществляется управление группой несвязанных одномерных объектов. В последнем случае система управления с микроЭВМ распадается на совокупность одномерных систем; ее виртуальная структура, представленная в виде совокупности одноконтурных систем, каждая из которых имеет свою программу управления ПУ1, ПУ2, ..., ПУк, показана на рис. 13.10. При управлении сложным объектом или группой объектов процессор обслуживает каналы управления или по жесткой программе, или по мере поступления заявок от отдельных каналов (причем возможно приоритетное обслуживание тех или иных заявок). Второе направление развития систем управления — это использование автономных микроЭВМ в каждом контуре управления.
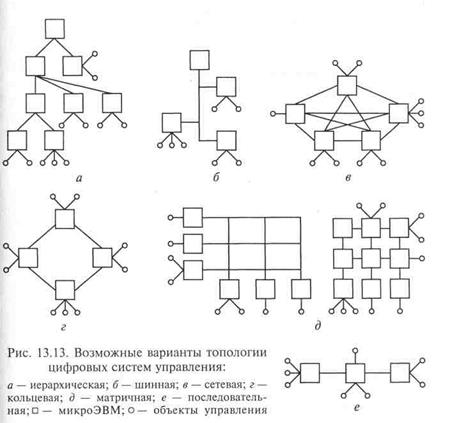
Структурная схема системы управления с автономными микроЭВМ, или микроконтроллерами МК1, МК2, ..., МКk, показана на рис. 13.11. Микроконтроллеры — это упрощенные микроЭВМ, размещаемые в непосредственной близости от управляемого объекта. В микроконтроллерных системах центральная ЭВМ либо отсутствует совсем, либо выполняет функции диспетчера или супервизора. Выбор одного из двух направлений построения систем управления с микроЭВМ связан, в частности, с вопросами надежности и стоимости. Для увеличения надежности, производительности и гибкости САУ применяют многомикропроцессорные системы и системы на базе нескольких микроЭВМ — многомашинные. В первом случае большое число микропроцессоров работает на одну общую шину (рис. 13.12). Возможные варианты топологии многомашинных систем приведены на рис. 13.13.
Многомашинные системы характеризуются высокой надежностью. Так, например, в случае выхода из строя любой микроЭВМ в системе с сетевой топологией (см. рис. 13.13, в) сохраняется по меньшей мере два канала связи со всеми другими микроЭВМ.
Типовая одноконтурная система управления с микроЭВМ (рис. 13.14) содержит АЦП, ЦАП, микроЭВМ и непрерывную часть, включающую в себя объект управления и подключенные к нему элементы (исполнительный и воспринимающий). Кодироваться в АЦП могут входное задающее воздействие g(t), управляемая величина у(t), а также другая поступающая извне информация. В результате такого кодирования на вход микроЭВМ в дискретные моменты времени поступают цифровые представления этих
величин g0 и у0. Цифровой сигнал управляющего воздействия х0 в соответствующее аналоговое представление х преобразуется ЦАП.
Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 2379; Нарушение авторского права страницы