
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Ульяновское высшее авиационное училищеСтр 1 из 22Следующая ⇒
Министерство транспорта Российской Федерации Федеральное государственное БЮДЖЕТНОЕ образовательное учреждение высшего профессионального образования Ульяновское высшее авиационное училище Гражданской авиации (институт)
Практическая аэродинамика Самолета DA 42
Учебное пособие
Ульяновск 2010
ББК О53–082.022–011я7 П 69
Практическая аэродинамика самолета DA 42: учеб. пособие / сост. Ю. Н. Стариков, В. П. Бехтир. – 2-е изд., испр.-Ульяновск: УВАУ ГА(И), 2010. – 131 с.
Представлены необходимые теоретические сведения по вопросам безопасной эксплуатации самолета DA 42 в нормальных и особых условиях. Распределение материала по темам и последовательность его изложения соответствует учебной программе дисциплины «Практическая аэродинамика самолета DA 42». Проверить в процессе подготовки к занятиям качество своих знаний можно, ответив на вопросы контрольных тестов, приведенных в пособии. А для того чтобы сделать самостоятельную работу более целенаправленной в конце пособия даны вопросы итогового контроля по дисциплине. Предназначено для курсантов и студентов заочной формы обучения специализации 160503.65.01 – Летная эксплуатация гражданских воздушных судов, а также для слушателей АУЦ. Печатается по решению Редсовета училища.
ISBN 978-5-7514-0191-7
Ó Ульяновск, Ульяновское высшее авиационное училище гражданской авиации (институт), 2010 Ó Исправления, Ульяновск, Ульяновское высшее авиационное училище гражданской авиации (институт), 2012
Оглавление От составителей. 5 Аббревиатуры, используемые при рассмотрении летных характеристик самолета. 6 1. Геометрические и аэродинамические характеристики самолета DA 42 Twin Star 7 1.1. Особенности конструктивно-аэродинамической схемы самолета. 7 1.2. Основные геометрические характеристики самолета. 8 1.3. Аэродинамические характеристики самолета по кривым зависимости cy = f(a) и cy = f(cx) 10 1.4. Факторы, влияющие на аэродинамические характеристики самолета. 12 1.5. Роль и работа вертикальных законцовок крыла и стабилизатора. 16 2. Основные характеристики силовой установки. 18 2.1. Общие сведения. 18 2.2. Работа лопасти винта в полете. 23 2.3. Режимы работы винта. 25 2.4. Работа винта при увеличении скорости полета. 26 2.5. Работа винта при вводе и выводе из флюгерного положения. 27 3. Горизонтальный полет самолета. 29 3.1. Общие сведения. 29 3.2. Кривые потребных и располагаемых мощностей, анализ скоростей. 30 3.3. Особенности выполнения полета на первом и втором режимах полета. 32 3.4. Факторы, влияющие на летные характеристики самолета. 33 3.5. Дальность и продолжительность полета. 36 3.6. Особенности пилотирования самолета на больших углах атаки. 39 4. Взлет самолета. 40 4.1. Аэродинамическое обоснование взлета самолета. 40 4.2. Характеристики взлета. 42 4.3. Факторы, влияющие на скорость отрыва и длину разбега. 43 4.4. Взлет с уменьшением шума на местности. 44 4.5. Взлет с ВПП при пониженном коэффициенте сцепления. 45 4.6. Взлет с боковым и попутным ветром.. 45 4.7. Порядок расчета взлетных характеристик самолета по номограммам РЛЭ.. 48 4.8. Расчет вертикальной скорости при продолженном взлете для преодоления препятствия. 50 4.9. Ошибки при выполнении взлета. 51 5. Набор высоты и снижение. 53 5.1. Общие сведения о наборе высоты.. 53 5.2. Влияние эксплуатационных факторов на характеристики набора. 54 5.3. Порядок набора высоты.. 56 5.4. Общие сведения о снижении. 59 5.5. Поляра снижения. 60 5.6. Порядок снижения. 62 6. Заход на посадку, посадка самолета и уход на второй круг. 65 6.1. Порядок захода на посадку и посадка самолета. 65 6.2. Посадочные характеристики самолета. 67 6.3. Факторы, влияющие на посадочные характеристики. 68 6.4. Расчет посадочных характеристик. 70 6.5. Уход на второй круг. 72 6.6. Посадка с боковым ветром.. 73 6.7. Ошибки при выполнении посадки. 75 7. Особенности характеристик устойчивости и управляемости. 77 7.1. Общие сведения о центровке. 77 7.2. Протокол взвешивания и определения центровки. 79 7.3. Принцип расчета центровки. 80 7.4. Продольное равновесие самолета. 82 7.5. Продольная устойчивость самолета по углу атаки (перегрузке) 83 7.6. Продольная статическая устойчивость самолета по скорости. 85 7.7. Продольная управляемость самолета. 86 7.8. Поперечное равновесие самолета. 87 7.9. Путевое равновесие самолета. 87 7.10. Путевая устойчивость самолета. 88 7.11. Поперечная устойчивость самолета. 89 7.12. Путевая и поперечная управляемость самолета. 90 8. Полет при несимметричной тяге. 91 8.1. Поведение самолета при отказе двигателя. 91 8.2. Изменение аэродинамических и летных характеристик при отказе двигателя. 92 8.3. Основные виды балансировки с отказавшим двигателем.. 93 8.4. Отказ двигателя на взлете. 95 8.5. Отказ двигателя в наборе высоты на начальном этапе 8.6. Посадка с одним неработающим двигателем.. 98 8.7. Уход на второй круг с одним неработающим двигателем.. 99 9. Характеристики прочности самолета и особенности полета в неспокойном воздухе. 100 9.1. Особенности полета в условиях болтанки. 100 9.2. Пилотирование в условиях турбулентности и выхода на большие углы атаки. Выход из непреднамеренного штопора. 103 9.3. Особенности полета в условиях вихревого следа за самолетом.. 104 9.4. Изменение летных характеристик при попадании в условия сдвига ветра. 105 10. Особенности полета самолета при обледенении. 108 Контрольные тесты.. 111 Вопросы итогового контроля. 128 Используемая литература. 130
От составителей Обращаем внимание читателей на то, что самолет DA 42 австрийского производства, поэтому на шкалах приборов, на номограммах в РЛЭ для обозначения физических величин употребляются неметрические единицы англоязычных стран (см. таблицу). В нашем пособии мы активно употребляем неметрические единицы измерения скорости и высоты, для остальных величин в основном приняты единицы измерения СИ.
Отличаются также и аббревиатуры, принятые для обозначения скоростей, поэтому для быстрой и удобной работы с пособием рекомендуем прежде всего внимательно ознакомиться с представленным ниже списком.
Аббревиатуры, используемые при рассмотрении CAS – индикаторная воздушная скорость. Приборная воздушная скорость с учетом поправки на погрешность установки и инструментальную погрешность. Индикаторная воздушная скорость равна истинной воздушной скорости в стандартных атмосферных условиях (международная стандартная атмосфера, ISA) на среднем уровне моря. IAS – приборная скорость по указателю воздушной скоpости. KCAS – индикаторная воздушная скорость в узлах. KIAS – приборная воздушная скорость в узлах. TAS – истинная воздушная скорость. Скорость самолета относительно воздуха. Истинная воздушная скорость – это индикаторная воздушная скорость с учетом поправок на высоту и температуру воздуха. VA – расчетная маневренная скорость. После превышения этой скорости запрещается полное или резкое перемещение рулевых поверхностей. VFE – максимальная скорость полета с выпущенными закрылками. Запрещается превышение данной скорости при определенном положении закрылков. VLO – максимальная скорость при выпуске/уборке шасси. Запрещается превышение данной скорости при выпуске или уборке шасси. VLE – максимальная скорость полета при выпущенном шасси. Запрещается превышение данной скорости при выпущенном шасси. VmCA – минимальная эволютивная скорость. Минимальная скорость, необходимая для сохранения управляемости самолета с одним неработающим двигателем. VNE – непревышаемая скорость в спокойном воздухе. Превышение данной скорости запрещается вне зависимости от обстоятельств. VNO – максимальная конструкционная крейсерская скорость. Превышение данной скорости допускается только в спокойном воздухе, при соблюдении должных мер предосторожности. VS – скорость сваливания, или минимальная непрерывная скорость, при которой сохраняется управляемость самолета в определенной конфигурации. VS 0 – скорость сваливания, или минимальная непрерывная скорость, при которой сохраняется управляемость самолета в посадочной конфигурации. VS 1 – скорость сваливания, или минимальная непрерывная скорость, при которой сохраняется управляемость самолета с убранными закрылками и шасси. VSSE – минимальная эволютивная скорость при обучении. Минимальная скорость, необходимая в случае намеренного останова одного двигателя или при работе одного двигателя в режиме IDLE (при обучении). Vx – скорость для набора высоты под наилучшим углом. VY – скорость для набора высоты с наибольшей скороподъемностью. VYSE – скорость для набора высоты с наибольшей скороподъемностью при одном неработающем двигателе. VREF –минимальная (базовая) скорость пересечения торца ВПП. Режимы работы двигателя: Положение шасси: Положение закрылков: IDLE – малый газ, UP – убрано, APP – заход, MAX – взлетный (максимальный), DOWN – выпущено. LDG – посадка, NOM – номинальный. UP – убрано.
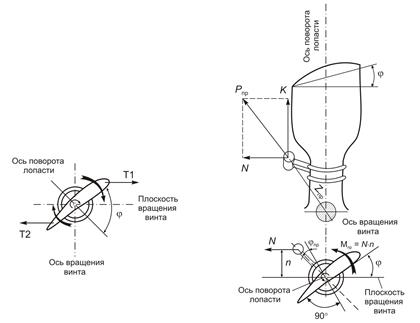
1.1. Особенности конструктивно-аэродинамической Самолет DA 42 Twin Star компании Diamond – это высокотехнологичный и высокоэкономичный аппарат. Впервые макет нового двухмоторного самолета DA 42 Twin Star был представлен на международной авиационно-космической выставке в Берлине, где удивил всех эффективной аэродинамикой и высоким эксплуатационным ресурсом. Планер самолета изготовлен из пластика, армированного углеволокном для большей прочности и легкости, что соответствует новым правилам, принятым Европейским ведомством авиационной безопасности. Элероны, рули высоты и направления, а также крыльевые закрылки выполнены из углеволокна и стекловолокна с применением многослойной технологии. Лопасти деревянно-композитные, повышенной прочности за счет покрытия из пластика и стальной кромки с нержавеющим покрытием. Кресла, дополнительно усиленные кевларом, позволяют выдерживать нагрузку 26 g. Самолет оборудован двумя винтовыми двигателями Centurion 1.7(2.0) (четырехцилиндровый двигатель прямого впрыска, жидкостного охлаждения с турбоохладителем и редукционной передачей винта 1: 1, 69). Каждый двигатель работает как на авиационном керосине, так и на дизельном топливе и развивает мощность 135 л. с. при 2300 об/мин. Цифровой электронный регулятор автоматически контролирует режимы работы двигателя, количество оборотов в минуту также регулируется автоматически. Два трехлопастных винта MTV-6 изменяемого шага оснащены системой поддержания постоянных оборотов и автоматическим флюгированием воздушного винта на случай, если двигатель откажет при более 1100 оборотов винта в минуту. На самолете установлено ультрасовременное авиационное электронное оборудование Garmin 1000, кабина экипажа оборудована встроенными дисплеями. Общие сведения Для уравновешивания сил лобового сопротивления, получения необходимой скорости и подъемной силы на самолете используется винтовая силовая установка: два двигателя ТАЕ 125-02-99 (объем каждого 2 л) и два трехлопастных винта МТV-6-A-C-F/CF 187-129. Для уменьшения температуры головок цилиндров применяется жидкостное охлаждение. Редуктор: 1: 1, 69 (на редукторе понижение оборотов). Режим MAX – Nmax = 99 кВт при n = 2300 об/мин, режим Nom – Nmax = 99 кВт при n = 2300 об/мин. Допускается максимальная частота вращения 2500 об/мин в течение 20 с. РУД выставляется в процентах. На 8–10 % нагрузки осуществляется имитация отказа двигателя при учебных полета. В крейсерском полете РУД в положении 65–70 % в зависимости от режима полета. Часовой расход топлива на каждый двигатель при РУД=50 % составляет 13, 6 л/ч. Критический двигатель на самолете – № 1 (вращение винта, если смотреть с кресла пилота, – по часовой стрелке (рис. 2.1)).
Рис. 2.1. К определению критического двигателя Работа воздушного винта основана на тех же законах аэродинамики, что и работа крыла. Винт должен развивать достаточную тягу в различных условиях полета, работать с наибольшей полезной отдачей мощности, не создавать волнового кризиса, обладать геометрической и весовой симметрией, быть достаточно прочным при небольшой массе, обеспечивать простоту в эксплуатации и ремонте. Винт должен быть статически и динамически уравновешенным. Направление вращения винта определяется из кабины пилота: если винт вращается слева направо, то его называют винтом правого вращения, если справа налево, то – винтом левого вращения. Каждый воздушный винт имеет три лопасти, изготовленные из дерева, имеющие покрытие из стеклопластика и отделочное покрытие из акрилового лака (рис. 2.2). Внешняя часть передней кромки лопастей защищена от эрозии оковкой из нержавеющей стали, приклеенной к лопасти. Внутренняя часть передней кромки лопасти защищена эластичной самоклеящейся лентой из полиуретана.
Рис. 2.2. Конструкция воздушного винта Принцип работы. При вращении винта возникают центробежные крутящие моменты, стремящиеся повернуть лопасть в сторону уменьшения угла установки (рис. 2.3, а). К каждой лопасти винта самолета DA 42 прикреплены противовесы, которые обеспечивают компенсацию центробежных крутящих моментов и поворачивают лопасть в сторону увеличения угла установки (рис. 2.3, б). Двигатель оснащен системой электронного управления (FADEС), которая осуществляет регулирование шага винта. Масло из редуктора двигателя закачивается в регулятор постоянства оборотов (РПО), который регулирует подачу масла в винт в соответствии с требуемым шагом винта: давление в цилиндре действует на поршень, поворачивающий лопасти в сторону уменьшения угла установки. Соответственно, для облегчения винта (j лопасти уменьшается) – давление масла увеличивается, для затяжеления винта (j лопасти увеличивается) – давление масла уменьшается.
а б Рис. 2.3. Работа центробежных сил лопастей (а) и противовесов (б) Регулирование шага винта осуществляется системой FADEC автоматически (рис. 2.4). В зависимости от установки мощности шаг воздушного винта регулируется таким образом, что обеспечивается поддержание заданного числа оборотов.
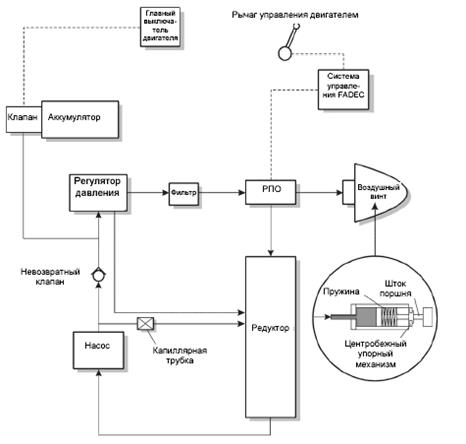
Рис. 2.4. Зависимость частоты вращения воздушного винта от режима работы двигателя Для ограничения поворота лопасти в сторону увеличения угла установки предусмотрен регулируемый упор. При числе оборотов двигателя свыше 1300 центробежный упорный механизм большого шага предотвращает выход лопастей за упор (рис. 2.5). При падении давления масла в полете (при оборотах двигателя свыше 1300) центробежный упорный механизм размыкается, и лопасти винта под действием противовесов проходят упор большого шага и устанавливаются в положение флюгирования.
Рис. 2.5. Принципиальная схема управления воздушным винтом В системе управления воздушным винтом установлен азотно-масляный аккумулятор гидравлического давления (см. рис. 2.5). При установке главного выключателя двигателя в положение OFF отсечной клапан аккумулятора закрывается. Масло хранится в аккумуляторе при нормальном давлении системы. Для расфлюгирования воздушного винта необходимо перевести главный выключатель двигателя в положение ON. При этом открывается электрический клапан аккумулятора, масло под давлением поступает из аккумулятора в воздушный винт, и лопасти винта устанавливаются в положение малого шага. Углы установки лопастей воздушного винта при 0, 75R: 1. Малый шаг – 12° ± 0, 2°: – обеспечивает наименьшее сопротивление, что облегчает запуск и устойчивость режима работы двигателя на малом газе (IDLE); – при пробеге обеспечивает создание небольшой отрицательной тяги при РУД = 0 % и способствует уменьшению длины пробега. 2. Фиксация рабочего положения – 15° ± 1°. 3. Положение флюгирования – 81° ± 1°: обеспечивает положение минимального сопротивления винта. Работа воздушного винта оказывает существенное влияние на полет самолета. При полете на малых углах атаки (до a ≈ 2-3°) ось вращения винта почти совпадает с направлением вектора скорости полета и направлением тяги винта (обдувка симметричная). За счет увеличения местной скорости обтекания частей самолета на величину скорости струи, отбрасываемой винтом назад, пропорционально увеличиваются подъемная сила и сила лобового сопротивления, в результате чего аэродинамическое качество самолета почти не изменяется. При полете на больших углах атаки крыла и малых скоростях полета вектор воздушной скорости не будет перпендикулярен плоскости вращения винта (косая обдувка). При косой обдувке вектор силы тяги винта (Pист) раскладывается на две составляющие: – горизонтальную составляющую (Px), обеспечивающую движение самолета; – вертикальную составляющую (Py), действующую в направлении подъемной силы крыла и увеличивающую ее. Таким образом, в полете на углах атаки более 3-4° аэродинамические характеристики самолета улучшаются за счет увеличения подъемной силы крыла на величину вертикальной составляющей силы тяги. Влияние Py на увеличение аэродинамического качества самолета тем больше, чем больше угол атаки (меньше скорость полета) и выше режим работы двигателя. Высотно-скоростные характеристики двигателя. Высотной характеристикой двигателя называется зависимость эффективной мощности и эффективного удельного расхода топлива от высоты полета при постоянной частоте вращения вала двигателя. С подъемом на высоту изменяется температура и плотность окружающего воздуха. Это вызывает изменение мощности, развиваемой двигателем, и удельного расхода топлива. Уменьшение плотности воздуха приводит к уменьшению расхода воздуха и соответственно эффективной мощности. Мощность двигателя с увеличением высоты полета уменьшается (рис. 2.6), что влияет на ограничение высоты полета самолета, уменьшается вертикальная скорость набора (Vy) и угол набора (Q).
Рис. 2.6. Высотная характеристика Скоростной характеристикой двигателя называется зависимость силы тяги винта на данной высоте (Н = const) при данной частоте вращения (n = const) от скорости полета. С увеличением скорости полета углы атаки элементов лопасти винта уменьшаются, поэтому уменьшается сила тяги винта (рис. 2.7). Зависимость тяги винта от скорости полета можно определить по формуле
где h – КПД винта (h = Nт / Nпотр, Nт – тяговая мощность, Nпотр – мощность, потребная для вращения); Nе – мощность двигателя, используемая для вращения винта (эффективная); V – скорость полета. Из формулы видно, что сила тяги обратно пропорциональна скорости.
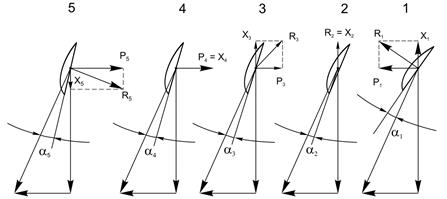
Рис. 2.7. Скоростная характеристика Чтобы не возникал волновой кризис, между двигателем и винтом установлен редуктор, понижающий частоту вращения. Для равномерного вращения необходимо равенство Мкр = Мт. Если это условие будет нарушено, то вращение получится ускоренным или замедленным. Регулятор постоянства оборотов обеспечивает на заданном режиме постоянство частоты вращения (n = const). Режимы работы винта При обтекании лопасти потоком каждый элемент аналогично элементу крыла создает полную аэродинамическую силу, которую удобно разложить на составляющие – силу тяги (Рв) и силу сопротивления вращения (Хвр). Сила Хвр создает момент сопротивления вращению, на преодоление которого должен быть затрачен вращающий момент двигателя. Таким образом, сила Хвр является «вредной» (направлена против вращения), а сила Рв, идущая на преодоление лобового сопротивления самолета, – полезной. Рассмотрим характерные режимы работы элемента лопасти винта (рис. 2.10). 1. Режим работы на месте и режим положительной тяги. При работе на месте V = 0. Сила тяги на элементе лопасти максимальна, так как угол атаки максимален. С увеличением поступательной скорости уменьшается угол атаки элемента лопасти и сила тяги. Это основной рабочий режим элемента лопасти, при котором лопасть обтекается потоком с положительными углами атаки. Режим положительной тяги называется пропеллерным (рис. 2.10, 1).
Рис. 2.10. Режимы работы винта: 1 – пропеллерный; 2 – нулевой тяги; 3 – торможения; 4 – авторотации; 5 – ветряка 2. Режим нулевой тяги. При увеличении поступательной скорости уменьшается угол атаки элемента лопасти и полная аэродинамическая сила (она разворачивается к плоскости вращения, и ее составляющая Р уменьшается, приближаясь к нулю). Элемент лопасти работает с небольшим отрицательным углом атаки (–0, 5...–1°). Этот режим характерен для планирования с высоты полета самолета при малых режимах. 3. Режим торможения. При дальнейшем увеличении поступательной скорости угол атаки элемента лопасти еще более уменьшается. Полная аэродинамическая сила будет направлена в сторону, обратную полету, отрицательная тяга небольшая. 4. Режим авторотации. При увеличении скорости полетаполная аэродинамическая сила будет направлена по оси вращения винта против полета. Сила сопротивления вращению элемента лопасти в этом случае равна нулю. Винт мощность от двигателя не потребляет и не отдает, он вращается по инерции. Угол атаки отрицательный. 5. Режим ветряка. При больших значениях и отрицательных углах атаки полная аэродинамическая сила отклоняется еще больше, создается значительная отрицательная тяга, а сила сопротивления вращению элемента лопасти оказывается направленной в сторону вращения и, действуя относительно оси вращения, раскручивает вал двигателя. Все эти режимы винт проходит при отказе двигателя. Из пропеллерного режима винт уходит на режим ветряка и вращается в этом режиме. Если винт не флюгируется, то необходимо выдерживать наивыгоднейшую скорость планирования, при которой качество максимальное, и произвести посадку на ближайшем аэродроме. Общие сведения Под установившимся движением самолета подразумевается движение, параметры которого не изменяются с течением времени (рис. 3.1).
Рис. 3.1. Условия горизонтального полета Для осуществления горизонтального полета необходимо, чтобы
Скорость, тяга и мощность, потребные для горизонтального полета, определяются по формулам:
Величина потребной скорости VГПзависит от полетной массы самолета, величины cy (угла атаки, степени обдувки крыла винтом, обледенения самолета) и плотности воздуха. Величина потребной тяги РГПзависит от массы самолета, аэродинамического качества, угла атаки, положения закрылков, шасси и обледенения самолета. При aкр = 21° коэффициент подъемной силы максимальный (cy max = 1, 62), а скорость горизонтального полета – минимальная. Потребная мощность для горизонтального полета зависит от массы самолета, угла атаки, положения закрылков, шасси, степени обдувки крыла винтом, обледенения самолета и плотности воздуха (высоты полета самолета, температуры воздуха и атмосферного давления). В зависимости от режима полета (высоты, скорости, массы) пилот устанавливает РУД по необходимости. Рекомендованное значение мощности составляет 70 %. Необходимо балансировать самолет по всем каналам по обстоятельствам, в процессе полета контролировать параметры двигателя и систем. Запрещено превышать разницу топлива в левом и правом полукрыльях 18, 9 л. Ниже представлены параметры горизонтального полета для разных скоростей и высот (табл. 3.1). Таблица 3.1 Характеристики взлета Взлет самолета характеризуется скоростью отрыва, длиной разбега и длиной взлетной дистанции.
Рис. 4.2. Изменение сил, действующих на самолет на разбеге При разбеге на самолет действуют подъемная сила (Y), сила лобового сопротивления (X), сила веса самолета (G), сила тяги силовой установки (P), сила реакции ВПП (N = G – Y) и сила трения (Fтр) (рис. 4.2). Сила трения определяется величиной силы реакции ВПП и коэффициентом трения (f ): Fтр= f (G – Y). Величина коэффициента трения зависит от состояния ВПП (таблица). Примерные значения коэффициента трения качения
В процессе увеличения скорости на разбеге величина сил, действующих на самолет, изменяется следующим образом: – подъемная сила и сила лобового сопротивления увеличиваются; – сила трения уменьшается; – сила тяги силовой установки уменьшается, вследствие чего уменьшается избыток силы тяги и среднее ускорение самолета: DP = P – (X + Fтр) (см. рис. 4.2). Скорость отрыва определяется по формуле Как видно, скорость отрыва самолета зависит от взлетной массы самолета, плотности воздуха и коэффициента подъемной силы с учетом обдувки крыла винтом. При увеличении температуры или уменьшении атмосферного давления плотность воздуха уменьшается, а истинная скорость отрыва увеличивается. Отрыв самолета на одном и том же угле атаки с заданной взлетной массой происходит на одной и той же приборной скорости, так как Длиной разбега называется расстояние, пробегаемое самолетом по земле от начала движения до момента отрыва: Из формулы видно, что длина разбега определяется скоростью отрыва и средним ускорением самолета Для преодоления препятствия В случае отказа двигателя могут возникнуть проблемы с преодолением препятствий при взлете. Для избежания этого необходимо произвести расчет градиента набора высоты ( Например, произведем расчет для условий: – рабочий двигатель (правый) в режиме MAX (при 2300 об/мин); – неработающий двигатель остановлен, винт зафлюгирован; – закрылки убраны; – скорость – 85 узлов; – шасси убрано; – нулевое скольжение обеспечено; – mвзл = 1700 кг (3748 фунтов); –Нбар = 0 футов; – температура наружного воздуха составляет 15 °C (59 °F); – высота препятствия – 30 м; – удаление препятствия от конца ВПП (Obstacles Dist.) – 830 м; – взлетная дистанция (TOD) – 530 м; – располагаемая длина полосы (RWL) – 950 м. Примечание. Левый двигатель (вид с рабочего места пилота) для самолета DA 42 является критическим с точки зрения его влияния на управляемость и летные характеристики самолета. Порядок расчета: 1. Определяем расстояние «d» от конца взлетной дистанции до Hпреп, на которой гарантируется пролет над препятствием с запасом 50 футов (рис. 4.8). «d» = (RWL + Obst. Dist.) – TOD = (950 + 830) – 530 = 1250 м. 2. Определяем градиент набора высоты:
3. Определяем, какую надо выдерживать вертикальную скорость набора высоты, чтобы преодолеть препятствие по курсу (Hпреп = 30 м) с зазором 50 футов:
Рис. 4.8. Дистанции необходимые для расчета параметра «d» Таким образом, при конкретных заданных условиях взлета расчет показал, чтобы преодолеть препятствие, необходимо выдерживать вертикальную скорость набора высоты 1, 09 м/с. Порядок набора высоты Набор высоты бывает двух видов: 1. Первоначальный набор высоты после взлета до Н = 400 м. 2. Набор высоты на эшелон. 1. Первоначальный набор высоты до Н = 400 м производится при следующих условиях: – РУД двух двигателей в положении MAX; – шасси и закрылки убраны; – скорость в наборе: при массе до 1700 кг – 81 узел, при массе свыше 1700 кг – 82 узла; – самолет балансировать без крена и скольжения (шарик в центре). Номограммы РЛЭ позволяют определить скороподъемность самолета для различных условий взлета. Ниже приведен пример расчета (рис. 5.8) вертикальной скорости при условии, что: – барометрическая высота аэродрома равна 0 м; – температура наружного воздуха составляет 15 °С; – полетная масса – 1750 кг. На рис. 5.8 стрелками показан порядок определения вертикальной скорости; согласно этому ключу получаем Vy = 5, 6 м/с.
Рис. 5.8. Расчет вертикальной скорости на начальном этапе набора высоты до Н = 400 м Градиент набора высоты определяется по формуле В нашем случае получаем: Результаты расчета показывают, что градиент набора высоты достаточно большой и обеспечит преодоление препятствий по курсу взлета, а именно, на удалении 1000 м самолет способен преодолеть препятствие высотой 120 м с зазором 50 футов (15 м). 2. Набор высоты на эшелон. На этом этапе шасси и закрылки должны быть убраны, а режим работы двигателей (вплоть до MAX) устанавливается таким, чтобы выдерживать расчетные скорости в наборе: – 87 узлов при массе до 1700 кг, – 88 узлов при массе свыше 1700 кг. Внимание! Во время набора высоты при повышении температуры масла и (или) температуры охлаждающей жидкости до желтого сектора полет продолжать с воздушной скоростью, увеличенной на 10 узлов, и мощностью, уменьшенной на 10 %, для улучшения охлаждения двигателя. Скороподъемность самолета при наборе высоты на эшелон (для справки) также определяется по номограммам РЛЭ. Ниже (рис. 5.9) представлен пример расчета для условий: – барометрическая высота аэродрома равна 1819 м; – температура наружного воздуха составляет 15 °С; – полетная масса – 1750 кг.
Рис. 5.9. Расчет вертикальной скорости при наборе высоты на эшелон Скороподъемность определяется тем же способом, что и в п. 1 (по стрелкам на рис. 5.9). В результате получаем: при заданных условиях Vy = 4, 6 м/с. Градиент набора высоты составляет: Общие сведения о снижении Установившееся снижение – это движение самолета вниз по наклонной траектории с постоянным углом и скоростью.
Рис. 5.10. Схема сил на снижении Для снижения с постоянным углом необходимо, чтобы Y = G = G cos Qсн (рис. 5.10). Для выполнения снижения с постоянной скоростью необходимо соблюдать условие: при положительной тяге X = Pсн + G2 = Pсн + G sin Qсн. Угол планирования зависит только от аэродинамического качества: чем больше качество, тем меньше угол планирования, и наоборот ( Вертикальная скорость планирования ( Дальность планирования (Lпл = H K) – это расстояние, проходимое самолетом относительно земли при планировании с заданной высоты. Скорость потребная для снижения определяется по формуле
Скорость снижения практически равна скорости горизонтального полета и зависит от полетной массы самолета, угла атаки и плотности воздуха. Если снижение происходит с положительной тягой, то G2 = X – Pсн, а G1 = Y » G, поэтому угол снижения определяется по следующей формуле:
Вертикальная скорость определяется по формуле Vy = V sin Qсн. Так как углы снижения небольшие, то Отсюда можно вычислить вертикальную скорость снижения: При снижении самолета с нулевой тягой угол снижения определяется по формуле Популярное: |
Последнее изменение этой страницы: 2016-03-22; Просмотров: 1308; Нарушение авторского права страницы

 1. Геометрические и аэродинамические
1. Геометрические и аэродинамические 



 ,
, 

 ,
,  .
.
 ,
, 

 .
. остается величиной постоянной.
остается величиной постоянной. .
. , при большей скорости отрыва и меньшем ускорении длина разбега будет больше.
, при большей скорости отрыва и меньшем ускорении длина разбега будет больше. ) и вертикальной скорости (Vy).
) и вертикальной скорости (Vy).







 ). Минимальный угол планирования будет достигнут на наивыгоднейшей скорости, при которой аэродинамическое качество максимальное.
). Минимальный угол планирования будет достигнут на наивыгоднейшей скорости, при которой аэродинамическое качество максимальное. ) – это высота, которую теряет самолет в единицу времени при планировании.
) – это высота, которую теряет самолет в единицу времени при планировании. .
.

 .
. , а вертикальная скорость снижения –
, а вертикальная скорость снижения –  .
.