
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Схемы замещения асинхронной машиныСтр 1 из 7Следующая ⇒
Схемы замещения асинхронной машины Т - образная схема замещения.
Сопротивлением намагничивающей цепи является главное индуктивное сопротивление первичной обмотки, и по этой цепи протекает намагничивающий ток
Напряжение на зажимах 1 и 2 намагничивающей цепи
Схема 1. Схема замещения не учитывает магнитных потерь в сердечниках машины. Потери в сердечнике статора (первичной цепи) могут быть учтены при
откуда
Параллельно включенные сопротивления можно объединить в одно общее сопротивление намагничивающей цепи или
причем
Схема 2.
Схема 3.
При этом
и выделено добавочное сопротивление
соответствующее механической мощности, развиваемой на роторе машины. Схема 3 аналогична схеме замещения трансформатора, к вторичным зажимам которой подключено нагрузочное сопротивление Намагничивающий ток схем 2 и 3 содержит, кроме реактивной составляющей
Непосредственный учет магнитных потерь в сердечнике ротора (вторичной цепи) в схеме замещения сложен, так как частота перемагничивания этого сердечника (0 < s < 0, 05) вследствие малой частоты перемагничивания эти потери вообще незначительны и их можно не учитывать. Если же учет этих потерь все же необходим, то следует иметь в виду, что они покрываются за счет механической мощности. С увеличением номинальной мощности к.п.д. машины увеличивается, а относительные величины потерь уменьшаются, соответственно чему уменьшаются также относительные величины активных сопротивлений. Из приведенных данных видно, что сопротивление намагничивающей цепи схемы замещения асинхронных машин значительно меньше, чем у трансформаторов. Это объясняется наличием в магнитной цепи асинхронных машин воздушного зазора между статором и ротором. В связи с этим намагничивающий ток и ток холостого хода асинхронных машин значительно, чем у трансформаторов.
Г - образная схема замещения.
Составим по правилу контурных токов уравнения напряжений схемы 3.
Для преобразования уравнений перейдем в них от переменной
где C1 — некоторое, неопределенное пока комплексное число. Эту операцию можно рассматривать как новое приведение вторичной цепи, причем C1 является коэффициентом приведения,
откуда
таким образом
Ток I00 представляет собой первичный ток идеального холостого хода асинхронной машины, когда ее ротор вращается с синхронной скоростью (s = 0). Генераторный режим
(-
В двигательном режиме
Теоретически скорость п в генераторном режиме может изменяться в пределах
В генераторном режиме.
Рассмотрим активные и реактивные относительно э.д.с.
В двигательном режиме s > 0 и обе составляющие На основании изложенного построены векторные диаграммы
В режиме противовключения.
Режим противовключения
(1< s< Поскольку как в двигательном, так и в режиме противовключения s> 0, активные и реактивные составляющие вторичного тока имеют в режиме противовключения такие же знаки, как и в двигательном. Это означает, что и в режиме противовключения машина потребляет из сети активную мощность и развивает положительный вращающий момент, действующий в сторону вращения поля. Но, поскольку ротор вращается в обратном направлении, на него этот момент действует тормозящим образом. В режиме противовключения машина потребляет также механическую мощность с вала или с ротора, поскольку внешний вращающий момент действует в сторону вращения ротора. Как мощность, потребляемая из сети, так и мощность, потребляемая с вала, расходуются на потери в машине. Полезной мощности машина поэтому не развивает, а в отношении нагрева рассматриваемый режим является тяжелым. Режим противовключения на практике используется для торможения и остановки асинхронных двигателей и приводимых ими в движение производственных механизмов. Например, в ряде случаев, при необходимости быстрой остановки двигателя, путем переключения двух питающих проводов трехфазного двигателя изменяют чередование фаз и направление вращения поля, а ротор в течение некоторого времени вращается при этом по инерции в прежнем направлении, т. е. теперь уже против поля. Механическая мощность рмх в данном случае развивается за счет кинетической энергии вращающихся масс вследствие уменьшения скорости вращения. При Режим противовключения называют также режимом электромагнитного тормоза. Следует, однако, иметь в виду, что существуют и другие способы электромагнитного торможения асинхронной машины.
Режим короткого замыкания.
Режимом короткого замыкания асинхронной машины называется ее режим при s=1, т. е. при неподвижном роторе. Этот режим соответствует начальному моменту пуска асинхронного двигателя из неподвижного состояния. Сопротивление асинхронной машины относительно ее первичных зажимов при s=1 называется сопротивлением короткого замыкания Zk
или, так как
ЭЛЕКТРОМАГИНТЫЙ МОМЕНТ Полезный вращающий момент
Полезный вращающий момент на валу двигателя М2 меньше электромагнитного момента М на величину
которая соответствует механическим и добавочным потерям, покрываемым за счет механической мощности Рмх на роторе. Поэтому
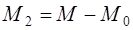
Механическая характеристика двигателя представляет собой зависимость скорости вращения п от развиваемого момента на валу М2 при U1 = const и f1 = const: n=f(M, ) или, наоборот, M2 =f(n). Так как при нагрузке момент М0 мал по сравнению с М н М2, то можно положить Очевидно, что вид механических, характеристик существенно зависит от величины вторичного активного сопротивления. установившийся режим работы асинхронного двигателя. Рассмотрим процесс пуска асинхронного двигателя с короткозамкнутой вторичной обмоткой при его включении на полное напряжение сети. Так производится пуск подавляющего большинства находящихся в эксплуатации асинхронных двигателей. При рассмотрении процесса пуска не будем принимать во внимание электромагнитные переходные процессы, связанные с тем, что при включении любой электрической цепи электромагнитного механизма под напряжение и при изменении режима его работы токи достигают практически установившихся значений не сразу, а после истечения некоторого времени, величина которого пропорциональна электромагнитной постоянной времени Т, зависящей от индуктивности и активного сопротивления цепи. Обычно при пуске асинхронного двигателя время его разбега до нормальной скорости значительно больше длительности электромагнитных переходных процессов, и поэтому влияние этих процессов на процесс пуска невелико. Следовательно, процесс пуска можно рассматривать на основе полученных выше зависимостей для вращающего момента и токов в условиях работы двигателя при установившемся режиме с заданным скольжением. На рис. показана механическая характеристика M=f(n} асинхронного двигателя и механическая характеристика Мст=f(n) некоторого производственного механизма, приводимого во вращение двигателем.
Рис 1. Соотношения между моментами при пуске и работе асинхронного двигателя
Рис 2. Устойчивые (точки 1, 3) и неустойчивые (точка 2) режимы работы асинхронного двигателя.
Уравнение моментов агрегата «двигатель — производственный механизм» имеет вид
где
представляет собой динамический вращающий момент агрегата, пропорциональный моменту его инерции J. Если при п = 0, пусковой момент
В точке 1 на 1рисункен достигается равновесие моментов.
При этом Переход двигателя к новому установившемуся режиму работы при изменении нагрузки физически происходит следующим образом. Если Мст возрастет, то будет М < Мст, Как видно из рис.1, при круто поднимающейся начальной (левой) части кривой момента М = f (s) асинхронный двигатель обладает жесткой механической характеристикой, т. е. при изменении нагрузки скорость вращения двигателя изменяется мало. Все нормальные асинхронные двигатели строятся с жесткой механической характеристикой, когда
КРУГОВАЯ ДИАГРАММА
При изменении нагрузки асинхронной машины ее первичный I1 и вторичный
геометрическим местом концов векторов тока Круговая диаграмма позволяет определить все электромагнитные величины, характеризующие режим работы машины при любом значении скольжения, и дает наглядное представление об изменении этих величин при изменении режима работы машины. Поэтому она имеет большое методическое значение. Кроме того, она имеет также существенное практическое значение для изучения режимов работы асинхронных машин в случаях, когда их параметры можно принять постоянными. Прямая сопротивлений вторичной цепи.
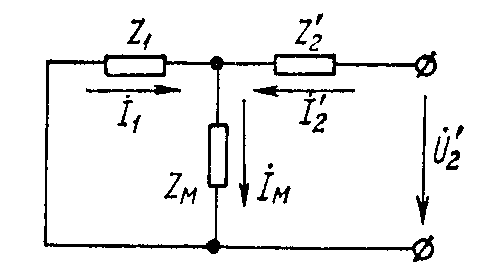
Круговую диаграмму асинхронной машины удобно рассматривать на основе Г-образной схемы замещения
Исследуем сначала геометрическое место вторичного тока
где
где
Изобразим по уравнению на комплексной плоскости (левая сторона рис.) комплекс сопротивления
ПРЯМОЙ ПУСК При рассмотрении возможных способов пуска в ход асинхронных двигателей необходимо учитывать следующие основные положения: 1) двигатель должен развивать при пуске достаточно большой пусковой
момент, который должен быть больше статического момента сопротивления на валу, чтобы ротор двигателя мог прийти во вращение и достичь номинальной скорости вращения; 2) величина пускового тока должна быть ограничена таким значением, чтобы не происходило повреждения двигателя и нарушения нормального режима работы сети; 3) схема пуска должна быть по возможности простой, а количество и. стоимость пусковых устройств—малыми. При пуске асинхронного двигателя на холостом ходу в активном сопротивлении его вторичной цепи выделяется тепловая энергия, равная кинетической энергии приводимых во вращение маховых масс, а при пуске под нагрузкой количество выделяемой энергии соответственно увеличивается. Выделение энергии в первичной цепи обычно несколько больше, чем во вторичной. При частых пусках, а также при весьма тяжелых условиях пуска, когда маховые массы приводимых в движение механизмов велики, возникает опасность перегрева обмоток двигателя. Подробно динамика движения электропривода и энергетические соотношения при пуске рассматриваются в курсах электропривода. Число пусков асинхронного двигателя в час, допустимое по условиям его нагрева, тем больше, чем меньше номинальная мощность двигателя и чем меньше соединенные с его валом маховые массы. Двигатели мощностью 3—10 кет в обычных условиях допускают до 5—10 включений в час. Асинхронные двигатели с короткозамкнутым ротором проще по устройству и обслуживанию, а также дешевле и надежнее в работе, чем двигатели с фазным ротором. Поэтому всюду, где это возможно, применяются двигатели с короткозамкнутым ротором и подавляющее большинство находящихся в эксплуатации асинхронных двигателей являются двигателями с короткозамкнутым ротором. Наиболее простым способом пуска двигателя с короткозамкнутым ротором является включение обмотки его статора непосредственно в есть, па номинальное напряжение обмотки статора. Такой пуск называется прямым. При этом пусковой ток двигателя Iп=(4—7, 0)Iн. Современные асинхронные двигатели с короткозамкнутым ротором проектируются с таким расчетом, чтобы они по величине возникающих при пуске электродинамических усилий, действующих на обмотки, и по условиям нагрева обмоток допускали прямой пуск. Поэтому прямой пуск всегда возможен, когда сеть достаточно мощна и пусковые токи двигателей не вызывают недопустимо больших падений напряжения в сети (не более 10—15%). Современные энергетические системы, сети и сетевые трансформаторные подстанции обычно имеют такие мощности, что в подавляющем большинстве случаев возможен прямой пуск асинхронных двигателей. Нормальным способом пуска двигателей с короткозамкнутым ротором поэтому является прямой пуск. Нередко таким образом осуществляется пуск двигателей мощностью в тысячи киловатт. Если по условиям падения напряжения в сети прямой пуск двигателя с короткозамкнутым ротором невозможен, применяются различные способы пуска двигателя при пониженном напряжении. Однако при этом пропорционально квадрату напряжения на зажимах обмотки статора или квадрату пускового тока двигателя понижается также пусковой момент, что является недостатком пуска при пониженном напряжении. Поэтому эти способы пуска применимы, когда возможен пуск двигателя на холостом ходу или под неполной нагрузкой. Необходимость пуска при пониженном напряжении встречается чаще всего у мощных высоковольтных двигателей. Реакторный пуск
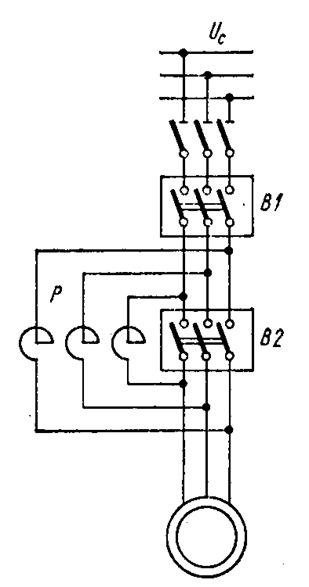
Реакторный пуск осуществляется согласно схеме. Сначала включается выключатель В1, и двигатель получает питание через трехфазный реактор (реактивную или индуктивную катушку) Р,
сопротивление которого Хр ограничивает величину пускового тока. По достижении нормальной скорости вращения включается выключатель В2, который шунтирует реактор, в результате чего на двигатель подается нормальное напряжение сети. Пусковые реакторы строятся обычно с ферромагнитным сердечником и рассчитываются по нагреву только на кратковременную работу, что позволяет снизить их вес и стоимость. Для весьма мощных двигателей применяются также реакторы без ферромагнитного сердечника, с обмотками, укрепленными на бетонном каркасе. Выключатель В1 выбирается на такую отключающую мощность, которая позволяет отключить двигатель при глухом коротком замыкании за выключателем, а выключатель В2 может иметь низкую отключающую мощность. Если составляющие сопротивления короткого замыкания двигателя равны
а при реакторном пуске, при пренебрежении активным сопротивлением реактора,
Следовательно, при реакторном пуске начальный пусковой ток уменьшается в
раз. Во столько же раз уменьшается также напряжение на зажимах двигателя в начальный момент пуска. Начальный пусковой момент при реакторном пуске Mп.р уменьшается по сравнению с моментом при прямом пуске Мп.п
раз. В приведенных соотношениях не учитывается изменение величины xk при изменении величины пускового тока. При необходимости нетрудно учесть это изменение.
АвтотрансформаторныЙ пуск
Автотрансформаторный пуск осуществляется по схеме (рис 1.) в следующем порядке. Сначала включаются выключатели В1 и В2, и на двигатель через автотрансформатор AT подается пониженное напряжение. После достижения двигателем определенной скорости выключатель В2 отключается, и двигатель получает питание через часть обмотки автотрансформатора AT, который в этом случае работает как реактор. Наконец включается выключатель В3, в результате чего двигатель получает полное напряжение. Выключатель В1 должен быть выбран на отключающую мощность при коротком замыкании, а выключатели В2 и ВЗ могут иметь меньшие отключающие мощности. Пусковые автотрансформаторы рассчитываются на кратковременную работу. Согласно ГОСТ 3211—46, пусковые автотрансформаторы должны иметь ответвления, соответствующие величинам вторичного напряжения, равным 73, 64 и 55% от первичного при прямой схеме включения и 45, 36 и 27% при
Рис 1.
Рис 2. обратной схеме включения (рис. 2). В каждом конкретном случае выбирается подходящая ступень напряжения. Если пусковой автотрансформатор понижает пусковое напряжение двигателя в kат раз, то пусковой ток в двигателе или на стороне НН автотрансформатора Iп.д уменьшается также в kат раз, а пусковой ток на стороне ВН автотрансформатора или в сети Iп.с уменьшается в Таким образом, при автотрансформаторном пуске Мп и Iп.с уменьшаются в одинаковое число раз. В то же время при реакторном пуске пусковой ток двигателей Iп.д является также пусковым током в сети Iп.с и пусковой момент Мп уменьшается быстрее пускового тока (в квадратичном отношении). Поэтому при одинаковых величинах Iп.с при автотрансформаторном пуске пусковой момент будет больше. Однако это преимущество автотрансформаторного пуска достигается ценой значительного усложнения и удорожания пусковой аппаратуры. Поэтому автотрансформаторный пуск применяется реже реакторного, при более тяжелых условиях, когда реакторный пуск не обеспечивает необходимого пускового момента.
Схемы замещения асинхронной машины Т - образная схема замещения.
Сопротивлением намагничивающей цепи является главное индуктивное сопротивление первичной обмотки, и по этой цепи протекает намагничивающий ток
Напряжение на зажимах 1 и 2 намагничивающей цепи
Схема 1. Схема замещения не учитывает магнитных потерь в сердечниках машины. Потери в сердечнике статора (первичной цепи) могут быть учтены при
откуда
Параллельно включенные сопротивления можно объединить в одно общее сопротивление намагничивающей цепи или
причем
Схема 2.
Схема 3.
При этом
и выделено добавочное сопротивление
соответствующее механической мощности, развиваемой на роторе машины. Схема 3 аналогична схеме замещения трансформатора, к вторичным зажимам которой подключено нагрузочное сопротивление Намагничивающий ток схем 2 и 3 содержит, кроме реактивной составляющей
Непосредственный учет магнитных потерь в сердечнике ротора (вторичной цепи) в схеме замещения сложен, так как частота перемагничивания этого сердечника (0 < s < 0, 05) вследствие малой частоты перемагничивания эти потери вообще незначительны и их можно не учитывать. Если же учет этих потерь все же необходим, то следует иметь в виду, что они покрываются за счет механической мощности. С увеличением номинальной мощности к.п.д. машины увеличивается, а относительные величины потерь уменьшаются, соответственно чему уменьшаются также относительные величины активных сопротивлений. Из приведенных данных видно, что сопротивление намагничивающей цепи схемы замещения асинхронных машин значительно меньше, чем у трансформаторов. Это объясняется наличием в магнитной цепи асинхронных машин воздушного зазора между статором и ротором. В связи с этим намагничивающий ток и ток холостого хода асинхронных машин значительно, чем у трансформаторов.
Г - образная схема замещения.
Составим по правилу контурных токов уравнения напряжений схемы 3.
Для преобразования уравнений перейдем в них от переменной
где C1 — некоторое, неопределенное пока комплексное число. Эту операцию можно рассматривать как новое приведение вторичной цепи, причем C1 является коэффициентом приведения,
откуда
таким образом
Ток I00 представляет собой первичный ток идеального холостого хода асинхронной машины, когда ее ротор вращается с синхронной скоростью (s = 0). Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 3500; Нарушение авторского права страницы



 аналогично тому, как это было сделано для трансформатора, путем включения на зажимы 1 и 2 схемы рис. параллельно сопротивлению
аналогично тому, как это было сделано для трансформатора, путем включения на зажимы 1 и 2 схемы рис. параллельно сопротивлению  активного сопротивления
активного сопротивления  такой величины, что потери в нем будут равны магнитным потерям в сердечнике статора на одну сразу:
такой величины, что потери в нем будут равны магнитным потерям в сердечнике статора на одну сразу: 

 Величину
Величину  можно найти, если из опытных или расчетных данных известны потери в сердечнике статора
можно найти, если из опытных или расчетных данных известны потери в сердечнике статора  при определенном E1 или определенном магнитном потоке. Обычно
при определенном E1 или определенном магнитном потоке. Обычно 
 , можно объединить в одно общее сопротивление намагничивающей цепи
, можно объединить в одно общее сопротивление намагничивающей цепи
 . В результате вместо схемы 1 получим схему 2, которая в несколько ином виде представлена па схеме 3.
. В результате вместо схемы 1 получим схему 2, которая в несколько ином виде представлена па схеме 3.




 , также активную составляющую
, также активную составляющую  , соответствующую магнитным потерям в статоре:
, соответствующую магнитным потерям в статоре: 
 при изменении s изменяется, в результате чего указанные потери при
при изменении s изменяется, в результате чего указанные потери при  не пропорциональны
не пропорциональны  . В нормальных рабочих режимах машины
. В нормальных рабочих режимах машины

 к новой переменной
к новой переменной 





 < s< 0). Для осуществления генераторного режима работы асинхронной машины ее нужно включить в сеть переменного тока и вращать с помощью соответствующего приводного двигателя (машина постоянного тока, тепловой или гидравлический двигатель) в сторону вращения магнитного поля со скоростью п превышающей синхронную скорость n1. Скольжение машины при этом отрицательно.
< s< 0). Для осуществления генераторного режима работы асинхронной машины ее нужно включить в сеть переменного тока и вращать с помощью соответствующего приводного двигателя (машина постоянного тока, тепловой или гидравлический двигатель) в сторону вращения магнитного поля со скоростью п превышающей синхронную скорость n1. Скольжение машины при этом отрицательно.
 , чему соответствует изменение скольжения в пределах
, чему соответствует изменение скольжения в пределах  . В действительности высокие скорости вращения недопустимы по условиям механической прочности, а по условиям ограничения потерь и нагревания и сохранения высокого к. п. д. в генераторном режиме возможны абсолютные значения скольжения такого же порядка, как и в двигательном режиме.
. В действительности высокие скорости вращения недопустимы по условиям механической прочности, а по условиям ограничения потерь и нагревания и сохранения высокого к. п. д. в генераторном режиме возможны абсолютные значения скольжения такого же порядка, как и в двигательном режиме.
 составляющие токи
составляющие токи  .
.
 ,
,  тока
тока  положительны.
положительны.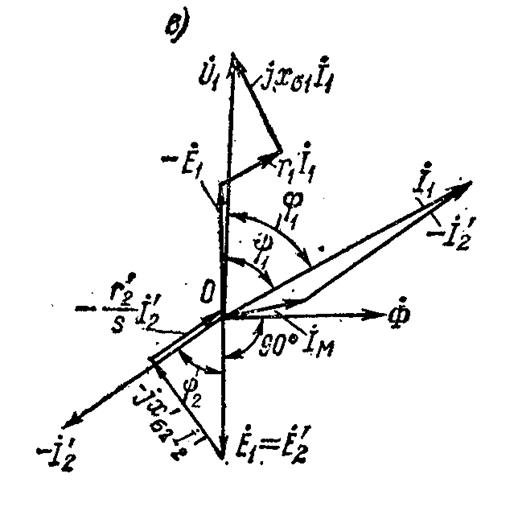
 машину необходимо отключить от сети, так как иначе она придет во вращение в обратном направлении. Таким же образом может осуществляться быстрый реверс (изменение направления вращения) двигателя, причем в этом случае, естественно, при
машину необходимо отключить от сети, так как иначе она придет во вращение в обратном направлении. Таким же образом может осуществляться быстрый реверс (изменение направления вращения) двигателя, причем в этом случае, естественно, при 
 , приближенно
, приближенно

 или включить M0 в величину статического тормозящего момента Мст, который развивается рабочей машиной или механизмом, приводимым во вращение асинхронным двигателем.
или включить M0 в величину статического тормозящего момента Мст, который развивается рабочей машиной или механизмом, приводимым во вращение асинхронным двигателем.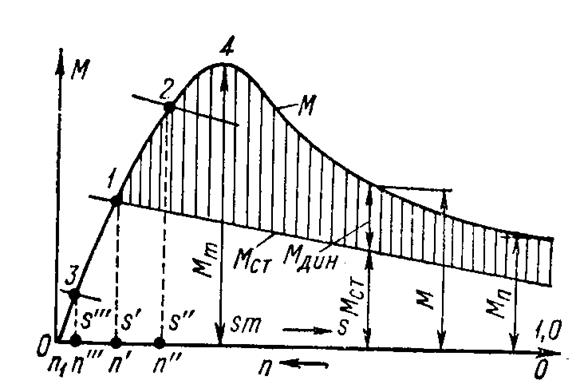


 , то
, то  и ротор двигателя придет во вращение. Ускорение ротора происходит до тех пор, пока (заштрихованная область)
и ротор двигателя придет во вращение. Ускорение ротора происходит до тех пор, пока (заштрихованная область)

 и наступает установившийся режим работы двигателя под нагрузкой со скоростью вращения п' и скольжением s'. Величина s' будет тем больше, чем больше М1„ и чем больше, следовательно, нагрузка двигателя. Если при работе двигателя его нагрузку (статический момент производственного механизма Мст„) увеличить (кривая 2 на рис 1), то s возрастет, а п уменьшится. При уменьшении нагрузки (кривая 3 на рис. 1), наоборот, s уменьшится, а п увеличится.
и наступает установившийся режим работы двигателя под нагрузкой со скоростью вращения п' и скольжением s'. Величина s' будет тем больше, чем больше М1„ и чем больше, следовательно, нагрузка двигателя. Если при работе двигателя его нагрузку (статический момент производственного механизма Мст„) увеличить (кривая 2 на рис 1), то s возрастет, а п уменьшится. При уменьшении нагрузки (кривая 3 на рис. 1), наоборот, s уменьшится, а п увеличится. и движение ротора двигателя станет замедляться. При этом скольжение возрастает, в соответствии с чем увеличиваются также э.д.с. E2s и ток Iа вторичной цепи. В результате электромагнитный момент М увеличивается и уменьшение п (увеличение s) происходит до тех пор, пока снова не наступит равенство моментов М = Мст. При уменьшении нагрузки процесс протекает в обратном направлении.
и движение ротора двигателя станет замедляться. При этом скольжение возрастает, в соответствии с чем увеличиваются также э.д.с. E2s и ток Iа вторичной цепи. В результате электромагнитный момент М увеличивается и уменьшение п (увеличение s) происходит до тех пор, пока снова не наступит равенство моментов М = Мст. При уменьшении нагрузки процесс протекает в обратном направлении. относительно малы.
относительно малы. токи изменяются по величине и по фазе. При U1 = const и f =const режим работы и величина нагрузки асинхронной машины однозначно определяются величиной ее скольжения s. При изменении скольжения в пределах от +
токи изменяются по величине и по фазе. При U1 = const и f =const режим работы и величина нагрузки асинхронной машины однозначно определяются величиной ее скольжения s. При изменении скольжения в пределах от +  описывает непрерывную замкнутую кривую, которая называется геометрическим местом этого тока. При постоянных параметрах
описывает непрерывную замкнутую кривую, которая называется геометрическим местом этого тока. При постоянных параметрах






 = f (s).
= f (s).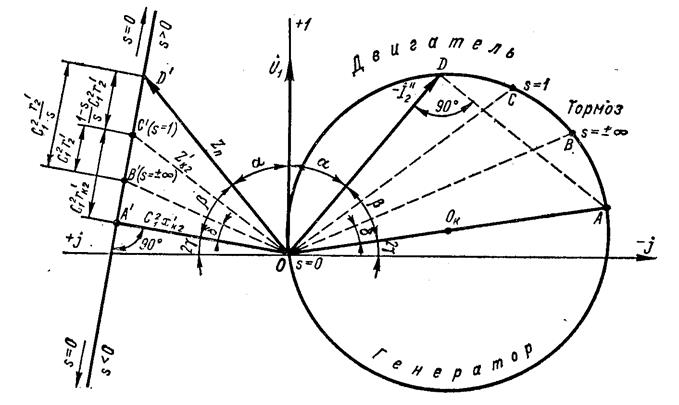

 и
и  то начальный пусковой ток при прямом пуске
то начальный пусковой ток при прямом пуске



 раз. Пусковой момент Mп, пропорциональный квадрату напряжения на зажимах двигателя, уменьшается также в
раз. Пусковой момент Mп, пропорциональный квадрату напряжения на зажимах двигателя, уменьшается также в