|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Термочувствительные преобразователи
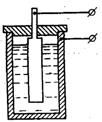
Принцип действия термочувствительных преобразователей (терморезисторов, термосопротивлений) основан на зависимости электрического сопротивления проводников или полупроводников от температуры. Прохождение электрического тока по проводу сопровождается выделением тепла, которое частично идет на нагревание провода, частично отдается в окружающую среду конвекцией, теплопроводностью и излучением. При установившемся тепловом равновесии температура провода и его сопротивление зависят от тока в проводе и от причин, влияющих на отдачу тепла в окружающую среду. К ним относятся размеры провода и среды, скорость движения среды, ее состав, плотность и др. Указанные зависимости используются для измерения температуры, скорости, плотности и состава газовой среды по сопротивлению провода. Провод, предназначенный для указанной цели, является измерительным преобразователем и носит название терморезистора. При применении терморезистора необходимо создать условия, в которых измеряемая неэлектрическая величина оказывает наибольшее влияние на сопротивление терморезистора, а остальные величины, наоборот, по возможности не влияют на него. В приборах для газового анализ – газоанализаторах – для измерения теплопроводности используется платиновый терморезистор 1 (рис. 4.1.6), помещенный в камеру 2 с анализируемым газом. Конструкция терморезистора, его арматура и камера, а также значение нагревающего тока I выбираются такими, чтобы теплообмен со средой осуществлялся в основном за счет теплопроводности газовой среды. Электролитические преобразователи Электролитические преобразователи основаны на зависимости электрического сопротивления раствора электролита от его концентрации. В основном они применяются для измерения концентраций растворов. Концентрацию электролита можно определить по его сопротивлению Rх, так как удельная электрическая проводимость электролита зависит от его концентрации. Измерительный электролитический преобразователь представляет собой сосуд с испытуемым электролитом и двумя электродами (рис. 4.1.7). Во избежание электролиза измерение сопротивления электролита производится на переменном токе. Для устранения влияния температуры применяется температурная компенсация. Один из термокомпенсаторов показан на рис. 4.1.7. Он представляет собой медно-никелевый резистор Rк, расположенный в растворе. Он соединен последовательно с разветвлением из сопротивления электролита Rх и шунтирующего манганинового резистора R1. Сопротивления Rк и R1 подобраны так, что изменение сопротивления электролита, вызванное изменением его температуры, с погрешностью до 1 – 2% компенсируется изменением сопротивления резистора Rк. Измеряемое сопротивление Rх находится по сопротивлению Rаб между точками а и б схемы, которое определяется обычно при помощи неуравновешенного измерительного моста, в одно из плеч которого включаются зажимы а и б электролитического преобразователя. Мост питается через стабилизатор от
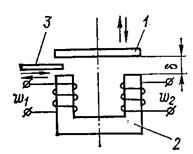
сети переменного тока. На выходе моста включается выпрямительный миллиамперметр, шкала которого проградуирована в значениях концентрации раствора электролита. Электролитические преобразователи получили широкое применение для автоматического контроля производственных процессов в пищевой, химической, текстильной промышленности, а также для измерения концентрации солей в воде для питания котлов. Индуктивные преобразователи Принцип действия преобразователей основан на зависимости индуктивности или взаимной индуктивности обмоток на магнитопроводе от положения, геометрических размеров и магнитного состояния элементов их магнитной цепи. Индуктивность обмотки, расположенной на магнитопроводе (рис. 4.1.8), где ZМ - магнитное сопротивление магнитопровода; vi – число витков обмотки. Взаимная индуктивность двух обмоток, расположенных на том же магнитопроводе, Приведенные соотношения показывают, что индуктивность и взаимную индуктивность можно изменять, например, воздействуя на длину d, сечение воздушного участка магнитопровода s, на потери в магнитопроводе и другими путями. Этого можно достичь, например, перемещением подвижного сердечника (якоря) 1 (рис. 4.1.8) относительно неподвижного 2, введением немагнитной металлической пластины 3 в воздушный зазор и т.д. На рис. 4.1.9 схематично показаны различные типы индуктивных преобразователей.
Индуктивный преобразователь (рис. 4.1.9, а) с переменной длиной воздушного зазора d характеризуется нелинейной зависимостью L = f (d). Такой преобразователь обычно применяется при перемещениях якоря на расстояние 0, 01 – 5 мм. Значительно меньшей чувствительностью, но линейной зависимостью L = f (s) отличаются преобразователи с переменным сечением воздушного зазора (рис. 4.1.9, б). Эти преобразователи используются при перемещениях якоря до 10 – 15 мм. Якорь в индуктивном преобразователе испытывает усилие притяжения со стороны электромагнита, которое определяется производной от энергии магнитного поля по перемещению якоря:
где WМ – энергия магнитного поля; L – индуктивность преобразователя; I – ток, проходящий через обмотку преобразователя. Широко распространены индуктивные дифференциальные преобразователи (рис. 17.8, в), в которых под воздействием измеряемой величины одновременно и притом с разными знаками изменяются два зазора двух электромагнитов. Дифференциальные преобразователи в сочетании с соответствующей схемой (обычно мостовой) имеют более высокую чувствительность, чем обычные преобразователи, дают возможность уменьшить нелинейность функции преобразования, испытывают меньшее влияние внешних факторов. В этих преобразователях результирующее усилие на якорь со стороны электромагнитов меньше, чем в недифференциальных. Для преобразования сравнительно больших перемещений (до 50 – 100 мм) применяются индуктивные преобразователи с незамкнутой магнитной цепью. На рис. 4.1.9, д схематически показано устройство дифференциального трансформаторного индуктивного преобразователя с незамкнутой магнитной цепью, используемого для передачи показаний различных неэлектрических приборов (манометров, дифференциальных манометров). Применяются также индуктивные дифференциальные преобразователи трансформаторного типа (рис. 4.1.9, г), в которых две секции первичной обмотки включены согласно, а две секции вторичной обмотки – встречно. При питании первичной обмотки переменным током и при симметричном положении якоря относительно электромагнитов ЭДС на выходных зажимах равна нулю. При перемещении якоря возникает сигнал на выходных зажимах. Если ферромагнитный сердечник преобразователя подвергать механическому воздействию F, то вследствие изменения магнитной проницаемости материала сердечника m изменится магнитное сопротивление цепи, что повлечет за собой изменение индуктивности L и взаимной индуктивности М обмоток. На этом принципе основаны магнитоупругие преобразователи (рис. 4.1.9, е). Конструкция преобразователя определяется главным образом значением измеряемого перемещения. Габариты преобразователя выбирают, исходя из необходимой мощности выходного сигнала и других технических требований. Для измерения выходного параметра индуктивных преобразователей наибольшее применение получили мостовые схемы (равновесные и неравновесные), а также компенсационная схема (в автоматических приборах) для дифференциальных трансформаторных преобразователей. Индуктивные преобразователи используются для преобразования перемещения и других неэлектрических величин, которые могут быть преобразованы в перемещение (усилие, давление, момент и т.д.). По сравнению с другими преобразователями перемещения индуктивные преобразователи отличаются значительными по мощности выходными сигналами, простотой и надежностью в работе. Недостатком их является наличие обратного воздействия преобразователя на измеряемый объект (воздействие электромагнита на якорь) и влияние инерции якоря на частотную характеристику прибора. Емкостные преобразователи
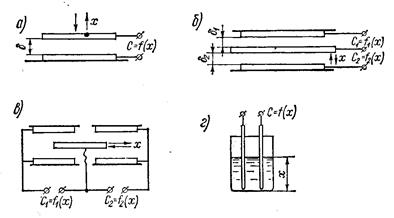
Емкостные преобразователи основаны на зависимости электрической емкости конденсатора от размеров, взаимного расположения его обкладок и от диэлектрической проницаемости среды между ними. Для двухобкладочного плоского конденсатора электрическая емкость На рис. 4.1.10 схематически показано устройство различных емкостных преобразователей. Преобразователи на рис. 4.1.10, а представляют собой конденсатор, одна пластина которого перемещается под действием измеряемой величины х относительно неподвижной пластины. Изменение расстояния между пластинами d ведет к изменению емкости преобразователя. Функция С = f3 (d) нелинейная. Чувствительность преобразователя резко возрастает с уменьшением расстояния d, поэтому целесообразно уменьшать начальное расстояние между пластинами. При выборе начального расстояния между пластинами необходимо учитывать пробивное напряжение воздух (10 кВ/см для воздуха). Такие преобразователи используются для измерения малых перемещений (менее 1 мм). Малое рабочее перемещение пластин приводит к появлению погрешности от изменения расстояния между пластинами при колебаниях температуры. Соответствующим выбором размеров деталей преобразователя и материалов эту погрешность можно значительно снизить. В емкостных преобразователях возникает усилие притяжения между пластинами, определяемое производной от энергии электрического поля WЭ по перемещению подвижной пластины, Применяются дифференциальные преобразователи (рис. 4.1.10, б), у которых имеется одна подвижная и две неподвижные пластины. При воздействии измеряемой величины х у этих преобразователей одновременно изменяются емкости С1 и С2.
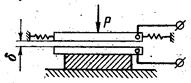
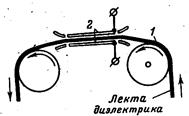
На рис. 4.1.10, в показано устройство дифференциального емкостного преобразователя с переменной активной площадью пластин. Такой преобразователь целесообразно использовать для измерения сравнительно больших линейных (более 1 мм) и угловых перемещений. В этих преобразователях легко получить требуемый характер функции преобразования путем профилирования пластин. Преобразователи с использованием зависимости С = f1 (e) применяются для измерения уровня жидкостей, влажности веществ, толщины изделий из диэлектриков и т.д. Для примера (рис. 4.1.10, г) дано устройство преобразователя емкостного уровнемера. Емкость между электродами, опущенными в контролируемый сосуд, зависит от уровня жидкости, так как изменение уровня ведет к изменению диэлектрической проницаемости среды между электродами. Изменением конфигурации пластин можно получить желаемый характер зависимости показаний прибора от объема (массы) жидкости. Для измерения выходного параметра емкостных преобразователей применяются равновесные и неравновесные мостовые схемы и схемы с использованием резонансных контуров. Последние позволяют создавать приборы с высокой чувствительностью, способные реагировать на перемещения порядка 10-7 мм. Цепи с емкостными преобразователями обычно питаются током повышенной частоты (до десятков мегагерц), что вызвано желанием увеличить мощность, рассеиваемую в преобразователе: Р = U2 w С (а следовательно, и мощность, попадающую на измерительный прибор), и необходимостью уменьшить шунтирующее действие сопротивления изоляции. Достоинства емкостных преобразователей – простота устройства, высокая чувствительность и возможность получения малой инерционности преобразователя. Недостатки – влияние внешних электрических полей, паразитных емкостей, температуры, влажности, относительная сложность схем включения и необходимость в специальных источниках питания повышенной частоты. В емкостных манометрах и динамометрах изменяется воздушный зазор d (рис. 4.1.11) между двумя пластинами конденсатора под действием измеряемого давления Р или силы F. Работа емкостного преобразователя для измерения толщины резиновой ленты 1, которая протягивается между двумя неподвижными электродами 2 (рис. 4.1.12), основана на влиянии толщины ленты на изменение воздушного зазора и емкость преобразователя. Емкостный преобразователь для измерения влажности зерна, порошка, волокна, пряжи представляет собой цилиндрический конденсатор (рис. 4.1.13). Внутренний электрод имеет форму цилиндрического стержня, наружный электрод – форму стакана, внутреннее пространство до определенного уровня заполняется испытуемым материалом. Содержание влаги в испытуемом материале резко увеличивает емкость вследствие большой диэлектрической проницаемости воды (e = 80).
Емкостные преобразователи имеют малую емкость, поэтому измерение их емкости производят при повышенной или высокой частоте, применяя при этом электронные усилители. Популярное:
|
Последнее изменение этой страницы: 2016-03-26; Просмотров: 1275; Нарушение авторского права страницы

 ,
,  , где v1 и v2 – число витков первой и второй обмоток. Магнитное сопротивление определяется выражением
, где v1 и v2 – число витков первой и второй обмоток. Магнитное сопротивление определяется выражением  , где
, где  - активная составляющая магнитного сопротивления (рассеиванием магнитного потока пренебрегаем); li, si, mi – соответственно длина, площадь поперечного сечения и относительная магнитная проницаемость i – го участка магнитопровода; m0 – магнитная постоянная; d - длина воздушного зазора; s – площадь поперечного сечения воздушного участка магнитопровода; ХМ = Р / (w Ф2) – реактивная составляющая магнитного сопротивления; Р – потери в магнитопроводе, обусловленные вихревыми токами и гистерезисом; w - угловая частота; Ф – магнитный поток в магнитопроводе.
- активная составляющая магнитного сопротивления (рассеиванием магнитного потока пренебрегаем); li, si, mi – соответственно длина, площадь поперечного сечения и относительная магнитная проницаемость i – го участка магнитопровода; m0 – магнитная постоянная; d - длина воздушного зазора; s – площадь поперечного сечения воздушного участка магнитопровода; ХМ = Р / (w Ф2) – реактивная составляющая магнитного сопротивления; Р – потери в магнитопроводе, обусловленные вихревыми токами и гистерезисом; w - угловая частота; Ф – магнитный поток в магнитопроводе.
 ,
, 
 , где e0 – диэлектрическая постоянная; e - относительная диэлектрическая проницаемость среды между обкладками; s – активная площадь обкладок; d - расстояние между обкладками. Из выражения для емкости видно, что преобразователь может быть построен с использованием зависимостей С = f1 (e), С = f2 (s), С = f3 (d).
, где e0 – диэлектрическая постоянная; e - относительная диэлектрическая проницаемость среды между обкладками; s – активная площадь обкладок; d - расстояние между обкладками. Из выражения для емкости видно, что преобразователь может быть построен с использованием зависимостей С = f1 (e), С = f2 (s), С = f3 (d). , где U и С – соответственно напряжение и емкость между пластинами.
, где U и С – соответственно напряжение и емкость между пластинами.