|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Встраиваемые системы и ОС для них
Встра́ иваемая систе́ ма, встро́ енная систе́ ма (embedded system)– это специализированная компьютерная система (рис. 4.6), в которой компьютер встроен в устройство, которым он управляет. Характерные особенности: · очень малое энергопотребление, порядка от 0, 5 до ~20 Ватт; · маленькие размеры; · отсутствие больших систем отвода тепла (охлаждения). Зачастую ЦПУ не охлаждается вообще или используется небольшой радиатор; · ЦПУ и системная логика, а также некоторые другие ИС, часто совмещены на одном кристалле (System On Crystal (SOC)). Основой построения встроенных систем служат одноплатные или однокристальные микроконтроллеры, специализированные или универсальные ЦПУ, ПЛИС. Большое количество фирм производит одноплатные компьютеры на основе микроконтроллеров и ЦПУ с RISC архитектурой. Среди них Advantech, AAEON, Advanced Micro Peripherals (AMP), Ampro Computers, Diamond Systems, iBASE, InnoDisk, Fastwel (Россия), Lippert, Octagon Systems, RTD Embedded Technologies, Tri-M Systems - Engineering, SanDisk, STEC. Примерами встроенных систем могут служить банкоматы, авионика, телекоммуникационное оборудование и тому подобные устройства. Основными производителями CPU для встраваемых систем являются VIA technologies, Transmeta Corporation, Infineon Technologies. 4.5. Промышленный контроллер Р-130ISA Новая модель промышленного контроллера Р-130 - Р-130Isa (табл. 4.1) предназначена для замены хорошо известных промышленных контроллеров Р-130 на действующих АСУ ТП и построения новых АСУ ТП с большими функциональными возможностями. Промышленный контроллер Р-130Isa разработан с целью дальнейшего совершенствования конструкции промышленных контроллеров Р-130, усиления их конкурентных преимуществ в соответствии с современными требованиями, предъявляемыми к автоматизированным системам управления и сбора данных. Расширение семейства промышленных контроллеров Р-130 укладывается в линию новых продуктов ОАО ЗЭиМ – Р-130Isa - КРОСС - ТРАССА, которая имеет единые средства технологического программирования в виде широко известной среды IsaGRAF, соответствующей международному стандарту IEC-1131. Промышленные контроллеры КРОСС и Р-130Isa образуют семейство программно и системно совместимых, взаимно дополняющих друг друга приборов, ориентированных на автоматизацию объектов средней и большой сложности (КРОСС) и малой сложности (Р-130Isa). Система программирования IsaGRAF – общедоступная система компании Altersys, она не требует профессиональных знаний по программированию. Пакет ISaGRAF поставляется в комплекте с промышленными контроллерами в соответствии с заказом. Таблица 4.1
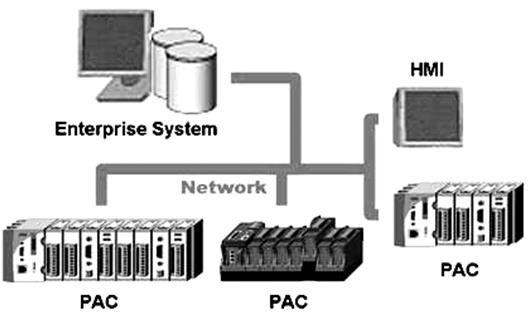
4.6. Совместное использование HMI и PAC Системы управления развиваются в сторону большей автоматизации процессов, число контроллеров и интеллектуальных компонентов стремительно возрастает, что приводит к добавлению мониторинга процессов. В настоящий момент системы строятся на основе программируемых контроллеров автоматизации Programmable Automation Controllers (PAC), которые выполняют свои индивидуальные задачи (рис. 4.7).
Чтобы увеличить модульность системы, необходимо разделить систему мониторинга и систему исполнения и принятия решений, разместив их на разных контроллерах, объединенных в общую сеть. Для централизованных систем сбора данных требуется наличие единого центра мониторинга и управления, а для распределенных сетей управления необходим другой подход. Системы управления развиваются в сторону большей автоматизации процессов, число контроллеров и интеллектуальных компонентов возрастает, что приводит к необходмости добавления мониторинга процессов. Cистемы строятся на основе программируемых контроллеров автоматизации PAC, которые выполняют свои индивидуальные задачи. Чтобы увеличить модульность системы, необходимо разделить систему мониторинга и систему исполнения и принятия решений, разместив их на разных контроллерах, объединенных в общую сеть. Если для централизованных систем сбора данных требуется наличие единого центра мониторинга и управления, то для распределенных сетей управления необходим другой подход. PAC& HMI . Программируемые контроллеры автоматизации используются во многих отраслях промышленности. В дополнение к устройствам ввода/вывода, каждая ветвь системы содержит PAC для решения локальных задач. В течение времени параметры устройств ввода/вывода могут меняться часто, однако это не должно затрагивать изначально заложенных алгоритмов обработки. Достигается эта универсальность за счет введения PAC. PAC могут быть установлены в одном производственном оборудовании, или же быть распределены в производственном пространстве. Центральная информационная база или система управления обеспечивают верхний уровень мониторинга, однако немедленный доступ к ним не всегда может быть обеспечен. PAC являются встраиваемыми компьютерами и не имеют собственного пользовательского интерфейса, что объясняет потребность в применении HMI в ключевых точках доступа для обеспечения полноты системы (рис. 4.8).
Семейства контроллеров CompactRIO и Compact FieldPoint являются примерами систем, которые требуют дополнительного аппаратного обеспечения для создания пользовательских интерфейсов. Сенсорные графические панели производства National Instruments (TPC-2006) являются оптимальным решением, соответствующим всем требованиям промышленного сектора. Разнообразие различных доступных интерфейсов подключения HMI обеспечивают легкость его интеграции в различные коммуникационные сети. HMI обеспечивает оператору прямой доступ к специфическим функциям контроллера или системы мониторинга. Важным аспектом использования HMI и PAC является сеть передачи данных и ее топология. В настоящий момент существует большое число протоколов, передача данных по Ethernet, линиям последовательной связи или по беспроводным каналам. В последнее время все большей популярностью стал пользоваться Ethernet, который позволит строить большие разветвленные сети с применением как проводных, так и беспроводных технологий. Функции и библиотеки для работы с TCP/IP, доступные в LabVIEW, позволяют пользователям произвести разработку сетевых распределенных приложений. Учитывая специфику распределенных систем, где запросы приходят асинхронно, требуя реакции с разными приоритетами, использование традиционной модели клиент/сервер себя не оправдывает. Наиболее оптимальное быстродействие и масштабируемость можно получить с использованием механизма Shared Variables, основанного на протоколе PSP и LabVIEW Touch Panel.
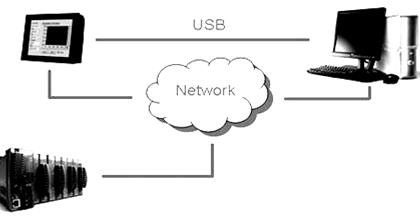
Интеграция операторских панелей HMI и PAC. Применение LabVIEW и Shared Variables в проекте позволяет использовать единое программное окружение для разработки ПО контроллеров реального времени и HMI операторских панелей. Для управления операторскую панель подключают к компьютеру через порт USB, а контроллер и компьютер объединяют в сеть через Ethernet (рис. 4.9)
4.7. Система Реального Времени CF-MNTR
Использование СРВ CF-MNTR позволяет в короткие сроки разрабатывать, внедрять в производство и осуществлять надежную эксплуатацию программно-аппаратных комплексов, реализующих автоматизированные системы различного назначения которые характеризуются тем, что в них требуются: - обеспечение средой выполнения прикладных программ возможностей удобной и эффективной работы со всеми системными ресурсами АСУ ТП (устройства, датчики, линии связи, диспетчеризация процессов и др.; независимость логики работы прикладных программ от аппаратной реализации разрабатываемой АСУ ТП) для обеспечения оптимальных условий разработки прикладных программ, что позволяет разрабатывать надежное и эффективное прикладное программное обеспечение с минимальными временными затратами; - многозадачная среда выполнения для прикладных программ, реализующих логику контроля управляемыми объектами; - описание логики работы алгоритмов управления и контроля объектов в терминах близких логике процессов на этих объектах; - четкая иерархичная структура данных (внешних и внутренних), ориентированная на использование при построении АСУ ТП; - одновременное использование разнородных каналов связи с контролируемыми объектами (специализированные ЛВС, ЛВС на основе протокола IPX, связь через COM порты, модемная связь и др.); - жестко регламентированное время реакции на различные события, происходящие в контролируемой системе; - возможность иерархичной структуры управления; - возможность независимой работы отдельных подсистем; - непрерывный и надежный функциональный самоконтроль как аппаратных и программных элементов системы, так и системы в целом; - наличие разнообразных устройств отображения состояния системы (индикационные символьные и графические терминалы, табло, мнемосхемы); - автоматическое ведение и хронометраж системных журналов; Оптимальность реализации многозадачного ядра системы позволяет управлять технологическими процессами в реальном времени в прикладных программах, работающих непосредственно под управлением CF-MNTR. Система предоставляет разработчикам широкие возможности создания интерфейса взаимодействия с оператором и другие, необходимые средства создания SCADA систем (регистрация и обработка различных событий, управление приоритетами). Отладочные средства, имеющиеся в системе позволяют оптимизировать процесс реализации комплексной АСУ ТП на всех этапах ее создания (проектирование, макетирование, реализация, наладка). СРВ CF-MNTR имеет высокую безотказность в работе. Система не накладывет практически никаких ограничений на используемое оборудование. Возможность использования простых контроллеров и линий связи является одной из принципиальных характеристик системы. Общая характеристика (для одного узла): - общее число двоичных датчиков в системе - до 5000; - общее число исполнительных устройств - до 3200; - число независимых процессов, работающих одновременно - до 70; - максимальное регламентируемое время реакции системы – не более 0.5сек (реальное время до 0, 2сек).
4.8.Экономичные контроллеры Pico Pico – это семейство самых маленьких, наиболее экономичных контроллеров (рис. 4.10), обладающих следующими преимуществами: · небольшой размер – контроллеры Pico имеют размер меньше, чем некоторые реле, экономят пространство на панели и системные затраты;
· простота – контроллеры Pico удобны в применении. Все программирование и установка данных могут быть выполнены с использованием встроенной вспомогательной клавиатуры и LCD дисплея; · гибкость – можно установить Pico контроллер на DIN-рельс или на панель. Имеются шесть моделей на ~120/240В и на =24В. Встроенные 8A реле выходов управляют рядом электрических компонентов. Функциональное исполнение. Контроллер Pico выполняет операции логики, временные инструкции счета и часов реального времени. Как компромисс между реле времени и малыми контроллерами, контроллер Pico идеален для замены реле в управляющих системах, таких, как освещение стоянок и зданий, и для приложений, в которых стоимость является первичным требованием. Конструктивное исполнение. Контроллер Pico может быть установлен на DIN-рельс или на панель. Принадлежности. Программное обеспечение – программное обеспечение (1760-PICOSOFT) PicoSoft™ для Windows 95/98 и Windows NT позволяет создавать, тестировать, загружать и выгружать программы в контроллеры Pico. Кабель связи PC-Pico – (1760-CBL-PM02) подключает контроллер Pico к вашему PC для использования программного обеспечения PicoSoft™. Модуль памяти – (1760-MM1, -MM2) позволяет хранить резервную копию программы и данных. Симулятор ввода/вывода – (1760-SIM) только для 1760-L12BWB или 1760-L12BWB-NC. Программирование. Контроллер Pico может быть полностью запрограммирован с клавиатуры. Программное обеспечение PicoSoft. Программное обеспечение PicoSoft, (каталожный номер 1760-PICOSOFT) позволяет создавать, редактировать, сохранять, загружать, выгружать и тестировать программы для контроллеров Pico.
4.9. RapidIO: технология для приложений реального времени Архитектура RapidIO разрабатывалась для удовлетворения требований: обеспечения малых задержек, детерминизма, надежности и масштабируемости, а также снижения энергопотребления, размеров и веса, обусловленного требованиями встроенных систем. Все архитектуры межсоединений нового поколения специально разрабатывались для очень быстрой связи. Полоса пропускания высокоскоростных параллельных и последовательных каналов достигает десятков гигабит в секунду на одно соединение. Технологии RapidIO, которые являются истинными архитектурами коммутации, позволяют иметь в каждом сетевом коммутаторе несколько одновременных соединений, в результате чего агрегатная пропускная способность системы может достигать тысяч Гбит/с. Отличает новые технологии межсоединений друг от друга их реальная способность решать конкретные задачи конкретной прикладной области. Но во всех случаях система межсоединений должна являться частью интегрированной системной архитектуры, оптимизирующей распределение потоков данных – от входов системы к процессорам и от них к другим процессорам и выходам системы в целом. Локальная же оптимизация только структуры межсоединений не обеспечит решения проблем других интерфейсов. Малые задержки. Технология RapidIO обладает задержками, которые обеспечивают производительность, сравнимую с архитектурой PCI либо превосходящую её возможности. На величину задержек влияет также степень перегрузки сети. Если некоторые линии связи будут заняты, то весь обмен данными может быть блокирован. Поскольку архитектура RapidIO допускает создание топологий произвольного типа, то на ее основе возможно построение эффективных конфигураций с множеством резервированных каналов. RapidIO гарантирует прямое продвижение пакетов по сети. При прохождении коммутируемой среды каждому пакету в каждый момент времени выделяется один канал. Если в текущий момент времени конкретный канал занят, пакет просто ожидает его освобождения. Такой подход обеспечивает меньшие задержки при значительных нагрузках по сравнению с теми технологиями, где пакет в случае блокировки канала возвращается источнику и передаётся повторно. Детерминизм. В RapidIO определено несколько уровней приоритетов, гарантирующих быструю доставку наиболее важных сообщений даже в условиях перегрузки сети. Тем самым обеспечивается предсказуемость выполнения транзакций в архитектуре " load/store", лежащей в основе технологии RapidIO. Надежность. В сетевых и коммуникационных системах исправление ошибок должно осуществляться в течение нескольких миллисекунд, если не микросекунд, что может быть выполнено только аппаратным образом. Гарантия доставки данных в неискаженном виде обеспечивается в RapidIO несколькими способами. Это единственная стандартная архитектура коммутации с аппаратным обнаружением и исправлением ошибок в каждом звене канала передачи данных. Для определения и исправления ошибок в заголовке и поле данных имеется отдельный CRC-код. Для дополнительной гарантии 100-процентного обнаружения ошибок все управляющие пакеты дополнительно отсылаются в инвертированном виде. В случае невосстановимой ошибки пакет повторно посылается по последнему звену канала передачи, так что ни один пакет данных не теряется. Простота встраивания. Интерфейс RapidIO может быть реализован как на самом кристалле процессора, так и в виде специализированной микросхемы (ASIC) и даже в FPGA-матрице, отличаясь чрезвычайно скромными требованиями к занимаемой площади. Физически интерфейс RapidIO может быть реализован в виде FPGA-матрицы для быстрой отладки опытного образца с последующим мелкосерийным производством. Благодаря стандартным LVDS-линиям (Low Voltage Differential Signalling – низковольтные дифференциальные линии связи) интерфейс совместим со многими существующими устройствами. Низкая стоимость интерфейса RapidIO обеспечивается благодаря небольшому числу сигнальных линий и широкой доступности. Восьмиразрядная параллельная версия RapidIO, в которой двунаправленный порт занимает всего 40 контактов разъема, требует для реализации в два раза меньше сигнальных линий, чем PCI и другие заменяемые ею процессорные шины. Для приложений с минимальными требованиями к числу линий существует последовательная версия RapidIO, физический уровень которой требует 4 контакта на один двунаправленный порт или 16 контактов в случае версии 4х. Масштабируемость. Пропускная способность связной структуры RapidIO возрастает пропорционально числу подключенных устройств. Поскольку RapidIO позволяет адресовать свыше 64000 устройств, практического ограничения на размер системы с коммутацией через RapidIO нет. Прозрачность для программных средств. Достоинство технологии RapidIO заключается в программной совместимости с существующими приложениями, работающими на базе процессоров с типовой архитектурой " load/store". Поскольку протокол RapidIO свободно реализуется на аппаратном уровне, никаких наборов программных протоколов не требуется, что объясняет малые задержки транзакций RapidIO. Широкая доступность. В отличие от большинства архитектур коммутации, распространение технологии RapidIO получило дополнительную поддержку в виде появления на рынке процессоров, в которых непосредственно реализованы интерфейсы к RapidIO. И Motorola, и IBM приняли решение оснастить интерфейсами с RapidIO процессоры PowerPC следующего поколения. Многие поставщики процессоров являются членами ассоциации RapidIO (RapidIO Trade Association), и ожидается, что они тоже будут выпускать устройства с поддержкой RapidIO. Система соединений для всей системы. Благодаря унификации соединений с процессором, RapidIO позволяет отказаться от разнообразия типов соединений внутри системы. Другие же архитектуры связи решают только часть проблемы, предоставляя решение проблем процессорных интерфейсов на долю неадекватных или закрытых решений. Меняющаяся роль шины ввода/вывода. Встраивание интерфейса RapidIO, DDR-контроллера памяти, контроллеров Gigabit Ethernet и других интерфейсов ввода/вывода в центральный процессор позволяет устранить " узкое место" между процессором и связной структурой и уменьшить потребление энергии интегрированным устройством. Если интерфейс Gigabit Ethernet тоже встроен в процессор, то необходимость во вспомогательной шине ввода/вывода между микросхемами отпадает и система начинает выглядеть как набор самодостаточных интегрированных процессоров с собственными встроенными контроллерами памяти и интерфейсами ввода/вывода.
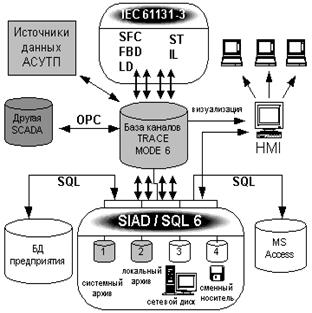
4.10. TRACE MODE 6 и T-FACTORY 6: обзор исполнительных модулей Исполнительные (runtime) модулиTRACE MODE® 6 и T-FACTORY.exe™ обеспечивают функционирование в реальном времени проектов АСУТП, созданных в интегрированной среде разработки и охватывают следующие уровни АСУ (рис. 4.11):
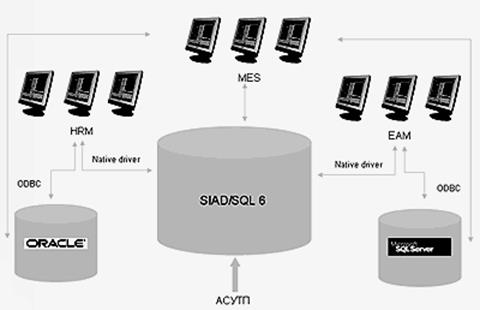
· операторский интерфейс (SCADA/HMI); · промышленные контроллеры (SOFTLOGIC); · промышленная база данных реального времени; · системы управления основными фондами и техническим обслуживанием оборудования (EAM); · системы управления персоналом (HRM); · системы управления производством (MES). Исполнительные модули для АСУТП (класс SOFTLOGIC и SCADA/HMI) входят в комплекс TRACE MODE®, а исполнительные модули для АСУП (класс EAM, HRM, MES) – в комплекс T - FACTORY. exe™. Все исполнительные модули TRACE MODE интегрированы между собой и образуют единую платформу для управления производством. Исполнительные модули TRACE MODE 6 и T-FACTORY 6 делятся на серверы (узлы) и клиенты (консоли). Это деление условно, так как консоль TRACE MODE 6 в ряде системных конфигураций может выполнять функции присущие серверам (пересчет базы каналов, исполнение программ и т.д.), а серверы могут осуществлять функции операторского интерфейса. И клиентское и серверное ПО разрабатывается в единой интегрированной системе разработки и имеет единую базу распределенных переменных, к атрибутам которых могут обращаться исполнительные модули TRACE MODE. Данная архитектура обеспечивает гибкость в разработке распределенных систем управления, так как позволяет создавать АСУ в различных архитектурах: · локальная; · распределенная клиент-сервер; · распределенная DCS (distributed control system); · телемеханическая. SCADA TRACE MODE имеет встроенную систему горячего резервирования. Исполнительные модули TRACEMODE 6 SOFTLOGIC - SCADA/HMI в распределенной АСУТП. В интегрированной SOFTLOGIC и SCADA/HMI-системе TRACE MODE 6 можно создавать многоуровневые, иерархически организованные, резервированные АСУ ТП и системы телемеханики. Сетевые коммуникации в TRACE MODE 6 и T-FACTORY 6 осуществляются по протоколу TCP / IP. Основным сервером реального времени уровня SCADA/HMI в TRACE MODE 6 является монитор реального времени (МРВ). МРВTRACE MODE 6осуществляет прием данных с контроллеров, плат ввода/вывода и систем телемеханики (RTU) через встроенные протоколы, драйверы, OPC- или DDE-клиенты. В МРВ 6 встроены бесплатные драйверы для2243 PLC, PC-based контроллеров, модулей удаленного ввода/вывода и плат УСО. Каждый сервер SCADA/HMI имеет встроенную поддержку протоколов M-LINK(RS 485/232) и I-NETдля связи с исполнительными модулями Micro TRACE MODEкласса SOFTLOGIC, работающими в PC-based контроллерах. МРВ 6 производит первичную обработку информации, поступающей из контроллеров или систем телемеханики (фильтрация, масштабирование, контроль границ и т.д.), управление и регулирование технологических процессов, перераспределение данных по локальной сети (I-NET TCP/IP), визуализацию информации на анимированных мнемосхемах и трендах (HMI), расчет в реальном времени статистических параметров процесса (SPC – statistical process control), ведение исторических архивов, управление собственной промышленной СУБД реального времени SIAD/SQL ™ 6, генерирование отчетных документов, обеспечение связи с СУБД и приложениями через SQL/ODBC и встроенный OPC-сервер (поставляется опционально). Существуют МВР с различным сочетанием вышеперечисленных свойств. Кроме того, в состав SCADA TRACE MODE входят версии МВР с автоматическим горячим резервированием, адаптивным регулированием, со встроенным OPC-сервером, GSM-сервером и т.д. В МВР входит графическая HMI-консоль, обеспечивающая визуализацию информации о технологическом процессе на динамических мнемосхемах, и обладает мощными графическими возможностями: · фотореалистичная объемная графика; · поддержка " прозрачности" фигур и наложения текстур; · поддержка графических слоев; · масштабирование экранов; · технология 3D FAST+, ускоряющая загрузку графических экранов в реальном времени; · возможность динамизации любого графического объекта; · мультипликация; · тренды реального времени; · исторические тренды неограниченной глубины; · окна событий. SCADA-сервер МРВ TRACE MODE 6 располагает собственной, многопоточной, основанной на приоритетах СРВ. При обычной работе минимальное время реакции МВР 6 составляет 10 мс. Время реакции сокращается в несколько раз при использовании специальных каналов типа FAST, обработка которых осуществляется с циклом 2-4 мс. СРВ МРВ 6 гибко настраивается путем перераспределения временных ресурсов вычислительного ядра либо приоритетов отдельных задач. В соответствующем диалоге интегрированной среды разработки можно настраивать приоритеты таких параметров, как: · основной поток; · прием и посылка по IP; · операторский интерфейс; · обмен с УСО через драйвер; · обмен с УСО через MODBUS; · OPC и DDE обмен и т.д. SCADA TRACE MODE располагает системой автоматической синхронизации сетевого времени для привязки технологических событий к временной шкале. Система управления тревогами МРВ обеспечивает автоматическое генерирование аналоговых (отклонение величины от заданной), цифровых (изменение состояния), составных (сочетание нескольких событий) и генерируемых пользователем алармов. Все алармы разбиваются по приоритетам и записываются в отчет тревог. МРВ с адаптивной самонастройкой регуляторов. SCADA МВР TRACE MODE с поддержкой системы автоматической (адаптивной) самонастройки ПИД-регуляторов называются Adaptive Control МРВ. AdaptiveControl МРВ основан на технологии, права на которую принадлежат компании AdAstrA. Программа обеспечивает периодическую или непрерывную подстройку регуляторов в автоматическом или полуавтоматическом режиме. Adaptive Control МРВ способен настраивать контуры регулирования в условиях помех, а также исключать появление неустойчивых режимов. Использование адаптивных регуляторов SCADA/HMI TRACE MODE 6 обеспечивает качество управления в любой момент времени для стационарных и нестационарных автоматизируемых объектов. Адаптивные регуляторы SCADA/HMI TRACE MODE 6 позволяют работать с меньшей амплитудой пробного сигнала на входе объекта (до 2-4%) при сохранении системой адаптивных свойств. Глобальный сервер документирования TRACE MODE® предназначен для подготовки документов в распределенных информационных системах (АСУ ТП или АСУП), включающих как узлы TRACE MODE и T-Factory, так и иные приложения (SCADA, контроллеры, СУБД, MES-, EAM- и ERP-системы и т.д.). В отличие от МВР с генератором отчетов (ДокМРВ+), глобальный сервер документирования устанавливается на выделенном ПК. Он может получать информацию с неограниченного числа ПК, контроллеров и генерировать документы произвольной формы по неограниченному числу шаблонов и сценариев, задаваемых в интегрированной системе разработки TRACE MODE. Подготовленные документы сохраняют на диске в формате HTML с возможностью вывода на печать. Для повышения надежности работы АСУ ТП, использующих глобальный сервер документирования, можно осуществлять резервирование серверов. Функция автоматического горячего резервирования встроена в сервер документирования Double Force. Выделенный сервер промышленной СУБД РВ SIAD/SQL 6. МВР+ (МРВ+) SCADA TRACE MODE 6 располагают встроенной промышленной СУБД реального времени SIAD/SQL 6 (рис. 4.12). Однако, ведение исторического архива на ПК, где работает МРВ+ не всегда целесообразно. В случае, если: · МРВ + обрабатывает большое число каналов;
· HMI-консоль перегружена графическими функциями; · в системе предъявляются повышенные требования к безопасности данных (необходима физическая изоляция сервера СУБД РВ); · требуется снять нагрузку с МРВ+ для ускорения временных показателей АСУ ТП, то рекомендуется создавать выделенный сервер СУБД РВ SIAD/SQL 6 на отдельном ПК. Этот архив является общим для всего проекта. В него через сеть могут сохранять данные все узлы проекта. Управление операциями с глобальным архивом осуществляет выделенный сервер исторического архива – глобальный регистратор. Сервер СУБД РВ SIAD/SQL™6 ведет динамическую оптимизацию записываемой информации, позволяющую на порядок уменьшить объем архива. Запись архивных данных ведется одновременно в 3 файла СУБД РВ SIAD/SQL™6. Еще один архив зарезервирован для системных нужд. Благодаря гибкой системе настройки параметров архивации TRACE MODE®, в один файл СУБД РВ можно сохранять историю " быстрых" параметров технологического процесса с максимальной степенью детализации за сутки/неделю, а в другой - " медленные" сводные данные о работе цеха за несколько лет. Это экономит ресурсы по сравнению вариантом " один параметр - одна таблица - один файл", который часто встречается в других SCADA-системах. В сочетании с высокой скоростью сохранения, которая на 2-3 порядка превосходит аналогичные показатели более " тяжелых" реляционных СУБД, SIAD/SQL™6 обеспечивает максимальную эффективность хранения и надежность исторического архива. Горячее резервирование серверов реального времени иSIAD/SQL . TRACE MODE® 6 располагает развитыми средствами повышения надежности SCADA-комплекса, путем резервирования их компонентов. В TRACE MODE можно резервировать контроллеры, серверы, клиенты и архивы данных и их отдельные компоненты. Данные из контроллеров могут поступать в серверы TRACE MODE® по резервированной линии передачи данных. Для этого в SCADA системе TRACE MODE® предусмотрена поддержка нескольких сетевых адаптеров. Она подразумевает автоматическое переключение сервера на резервный сетевой адаптер в реальном времени в случае отказа или обрыва линии основного адаптера. Для повышения надежности и отказоустойчивости распределенных систем в TRACE MODE предусмотрено горячее резервирование серверов АСУТП - МВР и серверов архива. В SCADA системе TRACE MODE® 6 реализован ряд функций автоматического дублирования и троирования серверов: · процедура автопостроения для автоматического создания базы каналов резервных узлов в инструментальной системе TRACE MODE® 6; · автоматическая синхронизация данных реального времени между основным и резервным серверами; · автоматическое переключение потоков данных на резервный сервер TRACE MODE® 6 в случае отказа основного; · автоматическое определение статуса сервера " основной" или " резервный" при старте системы и автоматическое разрешение конфликтов статуса при восстановлении основного сервера после сбоя; · протоколирование сбоев и переключений на резервные серверы. Микро TRACE MODE – исполнительные модули для контроллеров. Ц ифровое управление технологическим процессом в промышленных контроллерах или устройствах телемеханики осуществляется при помощи микро TRACEMODE 6. В состав Micro TRACE MODE входят исполнительные модули реального времени – микро МРВ, которые устанавливаются в контроллере и исполняют проект, созданный в Интегрированной среде разработки. Микро МРВ обладает следующей функциональностью: · сбор информации с плат УСО, через RS при помощи встроенных драйверов; · первичная обработка информации с объекта (фильтрация, масштабирование, контроль границ и т.д.); · привязка событий ко времени; · цифровое регулирование и управление процессом; · обмен с ПК по сети TCP/IP; · обмен с ПК по RS (M-LINK); · ведение локального архива для операторского ПК; · ведение дампа для безударного рестарта; · поддержка сторожевого таймера; Существуют версии микро МРВ, поддерживающие обмен с ПК через GSM-интерфейс, коммутируемую телефонную сеть, а также с адаптивной настройкой регуляторов. Для обеспечения высокой надежности АСУТП на базе микро МРВ выпускаются микро МРВ с горячим резервированием: дублированием и троированием. Клиентские модули SCADA/HMI TRACE MODE 6. Программа NetLink Light является клиентским модулем SCADA-системы TRACE MODE 6. Он представляет собой графическую HMI -консоль, визуализирующую данные, поступающие с серверов реального времени SCADA TRACE MODE через любой из интерфейсов, поддерживаемый в TRACE MODE (сеть TCP/IP, RS 232/485, модем по выделенной и коммутируемой линии, GSM SMS). Консоль NetLink Light это простое, но вместе с тем гибкое средство создания дополнительных автоматизированных рабочих мест ( АРМ ) операторов в распределенной АСУТП на базе TRACE MODE 6. Основные функции NetLink Light таковы: · прием данных реального времени от серверов TRACE MODE, т.е. от МРВ, МРВ+ или его разновидностей, а также от глобального регистратора и SOFTLOGIC контроллеров под управлением микро МРВ; · обработка полученных данных с помощью программ на языках стандарта IEC 61131-3; Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 883; Нарушение авторского права страницы


 Система CF-MNTR объединяет в себе свойства многозадачной СРВ с развитыми коммуникационными возможностями и системы типа SCADA. Коммуникационные возможности системы не накладывают никаких ограничений на оборудование связи и технологические контроллеры. Все аппаратно–зависимые свойства оборудования учитываются в очень простом сетевом драйвере (драйверах) нижнего уровня, создаваемом разработчиками АСУ ТП. Использование СРВ CF-MNTR при разработке и реализации комплексных АСУ ТП позволяет разработчикам применять в качестве аппаратного обеспечения любые средства (контроллеры, линии связи).
Система CF-MNTR объединяет в себе свойства многозадачной СРВ с развитыми коммуникационными возможностями и системы типа SCADA. Коммуникационные возможности системы не накладывают никаких ограничений на оборудование связи и технологические контроллеры. Все аппаратно–зависимые свойства оборудования учитываются в очень простом сетевом драйвере (драйверах) нижнего уровня, создаваемом разработчиками АСУ ТП. Использование СРВ CF-MNTR при разработке и реализации комплексных АСУ ТП позволяет разработчикам применять в качестве аппаратного обеспечения любые средства (контроллеры, линии связи).