|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
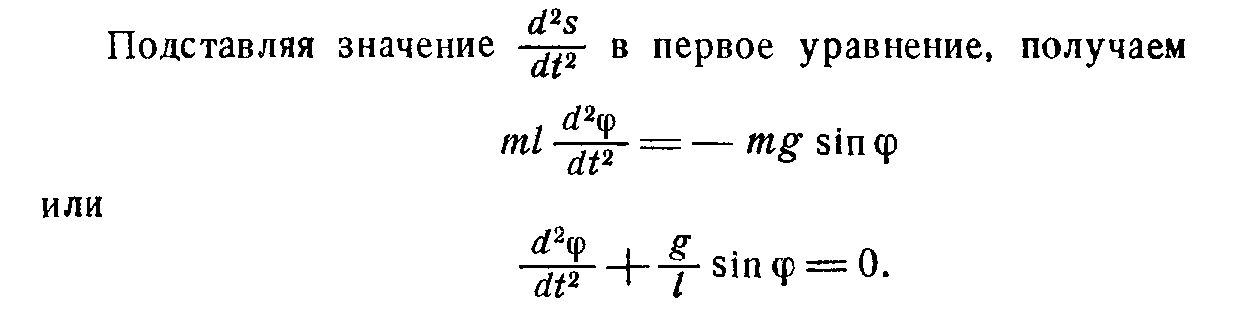
Математическим маятником называется материальная точка, подвешенная на нерастяжимой невесомой нити, совершающая движение в одной вертикальной плоскости под действием силы тяжести. ⇐ ПредыдущаяСтр 3 из 3
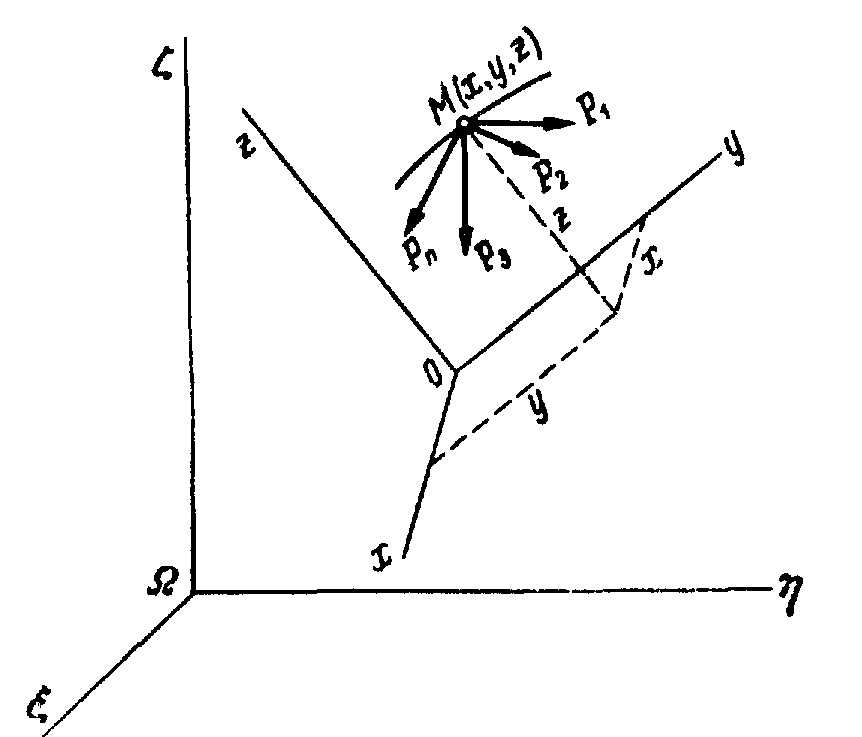
ДИНАМИКА ОТНОСИТЕЛЬНОГО ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ Дифференциальные уравнения относительно движения материальной точки. Переносная и кориолисова силы инерции. Положим, что система отсчета Оξ η ζ является инерциальной, а не связанная с ней система Oxyz — неинерциальной
Считаем, что переносное движение системы Oxyz и силы, действующие на точку, известны.
в случае непоступательного переносного движения, относительное движение материальной точки можно рассматривать как абсолютное, если к действующим на точку силам присоединить переносную и кориолисову силы инерции.
принцип относительности классической механики Никакие механические явления, происходящие в среде, не могут обнаружить ее прямолинейного и равномерного поступательного движения.
Случай относительного покоя. Сила тяжести. материальная точка под действием приложенных к ней сил находится в состоянии относительного покоя, т. е. не совершает движения относительно подвижной системы отсчета Oxyz.
в случае, когда материальная точка находится в состоянии относительного покоя, геометрическая сумма приложенных к точке сил и переносной силы инерции равна нулю.
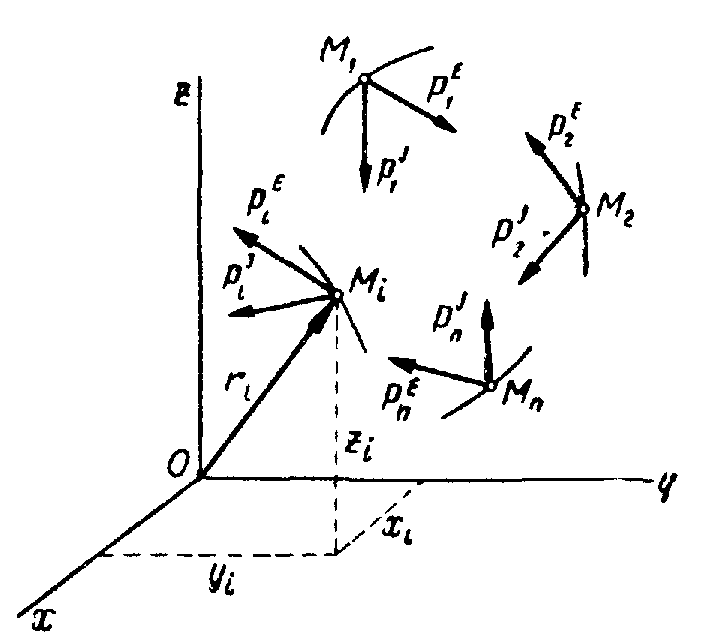
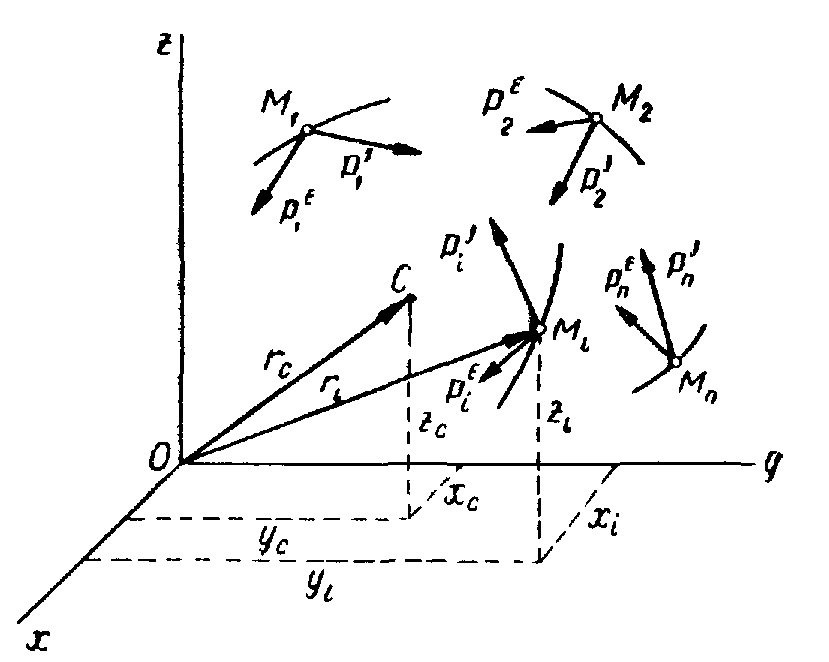
СИСТЕМА МАТЕРИАЛЬНЫХ ТОЧЕК. ТВЕРДОЕ ТЕЛО. МОМЕНТЫ ИНЕРЦИИ ТВЕРДОГО ТЕЛА Силы, действующие на точки механической системы Системой материальных точек, или механической системой, называют мысленно выделенную совокупность материальных точек, взаимодействующих между собой. Систему материальных точек, движение которых не ограничено никакими связями, а определяется лишь действующими на эти точки силами, называют системой свободных точек. Система материальных точек, движения которых ограничиваются наложенными на точки связями, называется системой несвободных точек. Все силы, действующие на систему несвободных точек, можно разделить на задаваемые силы и реакции связей а также на внешние и внутренние силы. Равнодействующую всех задаваемых сил, приложенных к точке М: несвободной механической системы, условимся обозначать Pi, а равнодействующую реакций связей — Ri
Центр масс системы материальных точек и его координаты
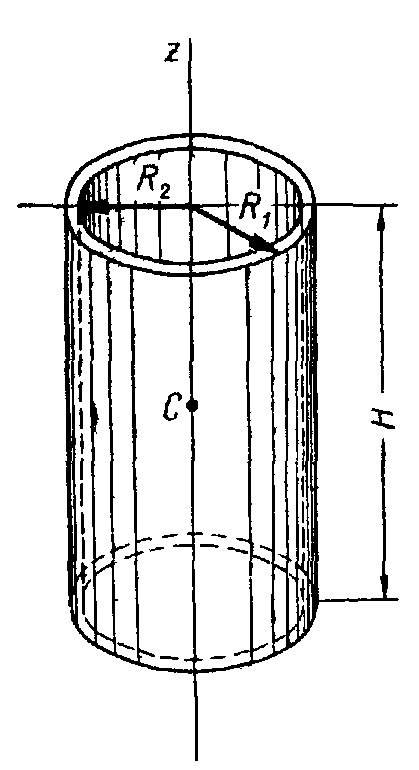
Твердое тело Рассмотрим систему п материальных точек, расстояния между которыми остаются неизменными. Такая система называется неизменяемой. Моменты инерции твердого тела. Радиус инерции. При поступательном движении твердого тела, так же как и при движении материальной точки, мерой его инертности является масса тела. При вращательном движении твердого тела мерой инертности является момент инерции твердого тела относительно оси вращения.
Теорема о моментах инерции твердого тела относительно параллельных осей (теорема Штейнера)
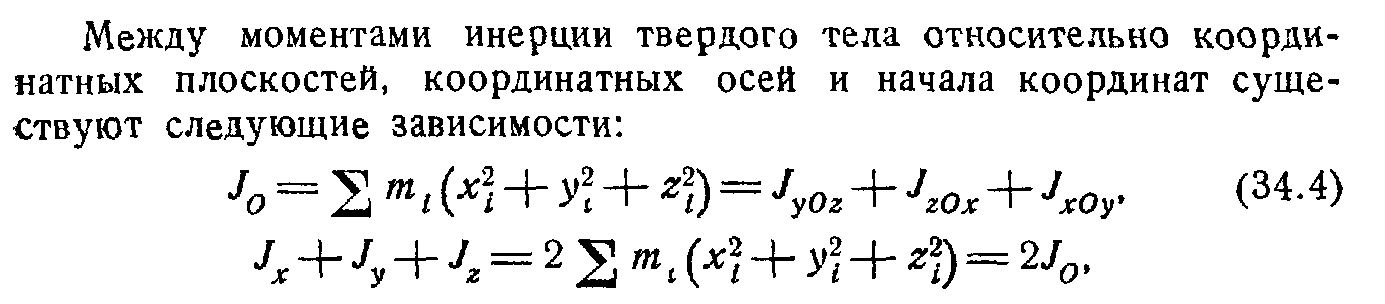
Формула для вычисления момента инерции твердого тела относительно любой оси, проходящей через начало координат. Центробежные моменты инерции
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС МЕХАНИЧЕСКОЙ СИСТЕМЫ. Дифференциальные уравнения движения механической системы Положение центра масс системы С определяется равенством
центр масс механической системы движется как материальная точка с массой, равной массе всей системы, к которой приложены все внешние силы, действующие на систему.
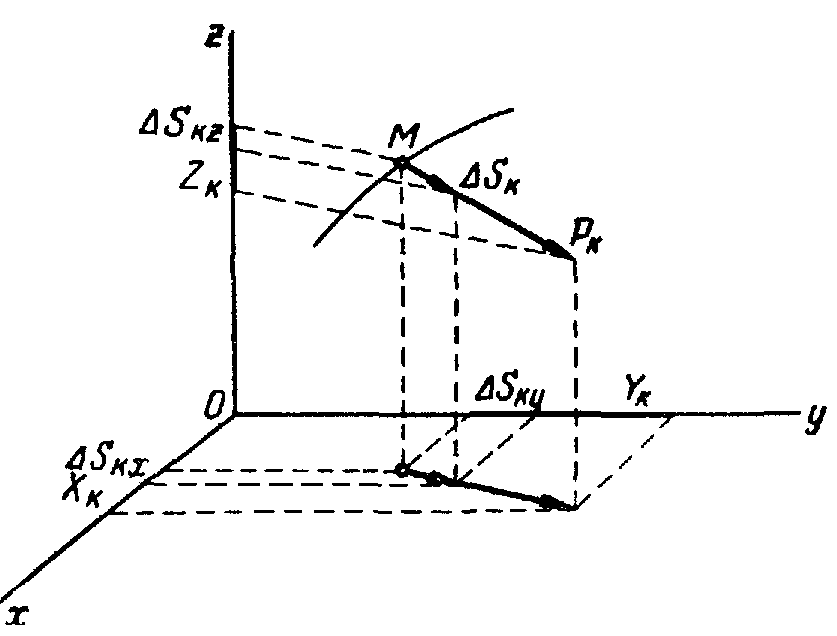
Импульс силы и его проекции на координатные оси Импульс силы характеризует передачу материальной точке механического движения со стороны действующих на нее тел за данный промежуток времени.
Импульс равнодействующей импульс равнодействующей нескольких сил за некоторый промежуток времени равен геометрической сумме импульсов составляющих сил за этот же промежуток времени. проекция импульса равнодействующей на любую ось равна алгебраической сумме проекций импульсов составляющих сил на ту же ось.
КОЛИЧЕСТВО ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ Количеством движения материальной точки называется вектор, имеющий направление скорости и модуль, равный произведению массы т на скорость ее движения v.
Проекции на оси Теорема об изменении количества движения материальной точки
Производная по времени от количества движения материальной точки геометрически равна равнодействующей силе, приложенной к этой точке.
Теорема импульсов. Изменение количества движения материальной точки за некоторый промежуток времени равно геометрической сумме импульсов сил, приложенных к точке за тот же промежуток времени.
изменение проекции количества движения материальной точки на данную ось за некоторый промежуток времени равно сумме проекций на ту же ось импульсов приложенных к точке сил за тот же промежуток времени.
Теорема об изменении количества движения механической системы Количеством движения механической системы называется вектор, равный геометрической сумме {главному вектору) количеств движения всех материальных точек этой системы.
вектор количества движения механической системы имеет модуль, равный произведению массы системы на скорость ее центра масс и направление этой скорости.
теорема об изменении количества движения механической системы в дифференциальной форме: Производная по времени от количества движения механической системы геометрически равна главному вектору внешних сил, действующих на эту систему.
Производная по времени от проекции количества движения механической системы на любую ось равна проекции главного вектора внешних сил, действующих на систему, на ту же ось.
теорема об изменении количества движения механической системы изменение количества движения механической системы за некоторый промежуток времени равно геометрической сумме импульсов внешних сил, приложенных к системе, за тот же промежуток времени.
Изменение проекции количества движения механической системы на любую ось равно сумме проекций импульсов всех внешних сил, действующих на систему, на ту же ось.
Моменты количества движения материальной точки относительно центра и относительно оси.
Момент количества движения mv точки М относительно центра О (рис. 117) представляет собой вектор Lo, направленный перпендикулярно плоскости, проходящей через вектор mv и центр О в ту сторону, откуда вектор mv по отношению к центру О, виден направленным против движения часовой стрелки. Модуль вектора Lo равен произведению величины mv на плечо h вектора mv относительно центра О: Момент количества движения Lo можно определить векторным произведением радиуса-вектора г, проведенного из центра О в точку М, на вектор количества движения mv:
Момент Lz количества движения mv точки М относительно оси z равен взятому со знаком плюс или минус произведению проекции вектора mv на плоскость I, перпендикулярную к оси z, на плечо этой проекции относительно точки О пересечения оси z с плоскостью I:
Проекция момента количества движения материальной точки относительно некоторого центра на ось, проходящую через этот центр, равна моменту количества движения точки относительно этой оси.
Изменение момента количества движения материальной точки.
Производная по времени от момента количества движения материальной точки относительно некоторой оси равна алгебраической сумме моментов сил, действующих на точку, относительно этой же оси.
Следствия из теоремы: 1.Если линия действия равнодействующей приложенных к материальной точке сил все время проходит через некоторый неподвижный центр, то момент количества движения материальной точки относительно этого центра остается постоянным.
Центральной силой называется сила, линия действия которой за все время движения проходит через некоторый центр, а модуль зависит от расстояния между этим центром и точкой приложения силы. 2. Если момент равнодействующей приложенных к материальной точке сил относительно некоторой оси все время равен нулю, то момент количества движения материальной точки относительно этой оси остается постоянным.
Кинетический момент механической системы относительно центра и оси. Кинетическим моментом или главным моментом количеств движения механической системы относительно данного центра называют вектор, равный геометрической сумме моментов количеств движения всех материальных точек системы относительно этого центра.
Кинетическим моментом, ила главным моментом количеств движения механической системы относительно оси, называется алгебраическая сумма моментов количеств движения всех материальных точек системы относительно этой оси.
Проекция кинетического момента механической системы относительно некоторого центра О на ось, проходящую через этот центр, равна кинетическому моменту системы относительно этой оси.
Изменение кинетического момента механической системы.
Производная по времени от кинетического момента механической системы относительно некоторого центра геометрически равна главному моменту внешних сил, действующих на эту систему относительно того же центра.
Производная по времени от кинетического момента механической системы относительно некоторой оси равна главному моменту внешних сил относительно этой оси. Закон сохранения кинетического момента механической системы
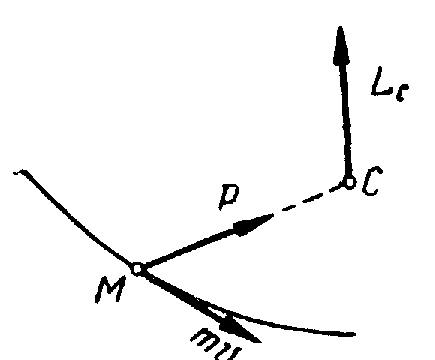
Теорема Резаля При движении системы точка А — конец вектора Lo - описывает в простран- стве некоторую линию, называемую годографом кинетического момента механической системы.
Скорость конца вектора кинетического момента механической системы относительно некоторого центра геометрически равна главному моменту внешних сил, действующих на эту систему, относительно того же центра.
РАБОТА. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ. Мерой механического движения является вектор количества движения материальной точки K = mv или механической системы К= mvс. Мера механического движения выступает кинетическая энергия материальной точки или механической системы. Мерой действия силы при превращении механического движения в другую форму движения является работа силы. Итак, существуют две различные меры механического движения: mv и mv2/2 и две различные меры действия силы: импульс силы S и работа силы А. Измерителями механического движения и действия силы в первом случае являются векторные величины mv и S, а во втором случае — скалярные величины
Работа постоянной силы
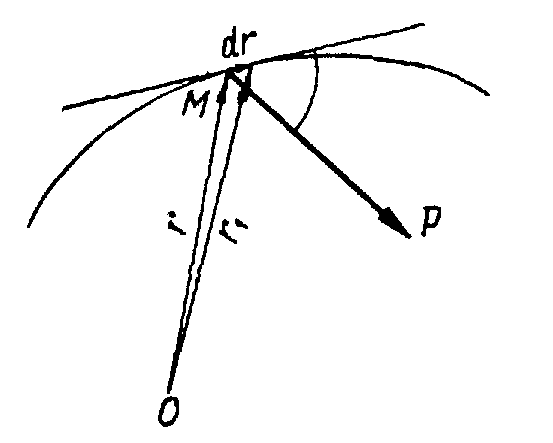
работа постоянной по модулю и направлению силы на прямолинейном перемещении определяется скалярным произведением вектора силы на вектор перемещения точки ее приложения. Элементарная работа. Работа силы на конечном пути.
Знак работы определяется только знаком косинуса угла
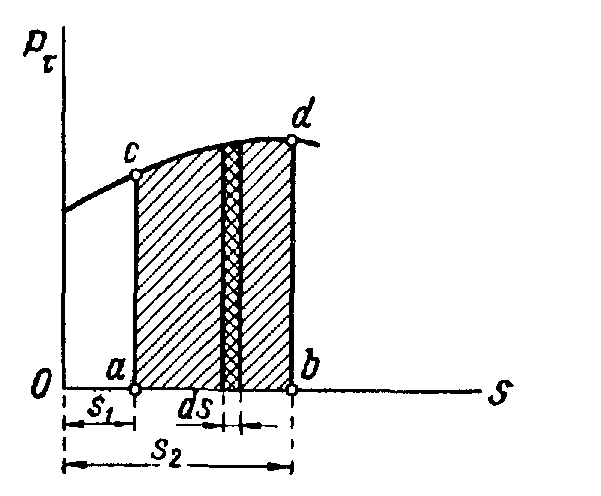
Изображение работы в виде площади
Работа силы тяжести.
Работа силы упругости
Работа силы тяготения
Работа силы ньютонова притяжения не зависит от формы траектории точки.
Теорема об изменении кинетической энергии материальной точки. Установим зависимость между работой, совершаемой приложенными к точке силами на перемещении М1 - М2 и изменением кинетической энергии точки на этом перемещении.
алгебраической сумме работ всех действующих на эту точку сил на этом же перемещении.
Теорема об изменении кинетической энергии материальной точки в относительном движении. Применяя к относительному движению материальной точки теорему об изменении кинетической энергии, необходимо к работе действующих сил добавить работу переносной и кориолисовой сил инерции Фе и Фс. Однако поворотное ускорение wc, а следовательно, и кориолисова сила инерции Фс всегда перпендикулярны к относительной скорости точки Vr Следовательно, работа кориолисовой силы инерции на относительном перемещении точки равна нулю и не входит в уравнение изменения кинетической энергии. Поэтому это уравнение для относительного движения точки имеет вид
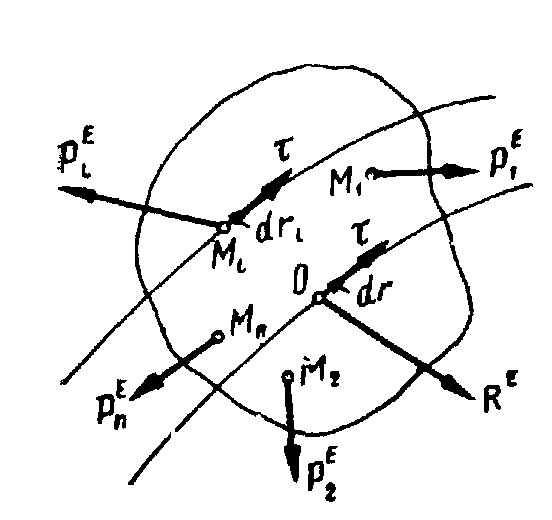
Работа сил, приложенных к твердому телу. Работа внутренних сил.
1. Поступательное движение твердого тела.
элементарная работа сил, приложенных к твердому телу, движущемуся поступательно, равна элементарной работе главного вектора внешних сил, приложенного в любой точке тела.
2. Вращение твердого тела вокруг неподвижной оси.
Элементарная работа сил, приложенных к твердому телу, вращающемуся вокруг неподвижной оси, равна произведению главного момента внешних сил относительно оси вращения на приращение угла поворота.
3. Общий случай движения свободного твердого тела. Элементарное перемещение свободного твердого тела можно разложить на поступательное перемещение с некоторым полюсом О, определяемое приращением дуговой координаты ds0, и поворот на элементарный угол δ α вокруг мгновенной оси Q, проходящей через полюс.
элементарная работа внешних сил, приложенных к свободному твердому телу в общем случае его движения* равна сумме элементарных работ их главного вектора на перемещении точки его приложения — полюса и главного момента этих сил относительно мгновенной оси, проходящей через полюс* на перемещении при повороте вокруг этой оси.
Теорема о кинетической энергии механической системы в общем случае ее движения.
Абсолютная скорость Vi любой точки Mi механической системы определится как геометрическая сумма скорости центра масс и относительной скорости этой точки в ее движении по отношению к центру масс.
Кинетическая энергия механической системы равна сумме кинетической энергии центра масс системы, масса которого равна массе всей системы, и кинетической энергии этой системы в ее относительном движении по отношению к центру масс.
Кинетическая энергия твердого тела.
1. Поступательное движение твердого тела.
кинетическая энергия твердого тела, движущегося поступательно, равна половине произведения массы тела на квадрат его скорости.
2. Вращение твердого тела вокруг неподвижной оси.
кинетическая энергия твердого тела, вращающегося вокруг неподвижной оси, равна половине произведения его момента инерции относительно оси вращения на квадрат угловой скорости тела.
3. Плоское движение твердого тела
4. Сферическое движение твердого тела.
5. Общий случай движения твердого тела.
Теорема об изменении кинетической энергии механической системы.
Механический коэффициент полезного действия машины Необходимо рассмотреть действующие на машину силы. Эти силы можно разделить на три категории: 1. Силы, совершающие положительную работу, называемые движущими силами, например, давление пара на поршень в цилиндре паровой машины 2. Силы, совершающие отрицательную работу, называемые силами сопротивления. Силы сопротивления делятся на две группы: а) полезные силы сопротивления — силы, для преодоления которых предназначена машина, например, сопротивление поднимаемого машиной груза и т. д.; б) вредные силы сопротивления — побочные силы сопротивления, как, например, силы трения, сопротивление воздуха и т. п. 3. Силы тяжести отдельных частей машины, совершающих попеременно то положительную, то отрицательную работу. Работа этих сил за полный цикл работы машины равна нулю, так как результирующее перемещение точки приложения каждой силы тяжести равно нулю. При установившемся движении машины ее кинетическая энергия не изменяется и сумма работ приложенных к ней движущих сил и сил сопротивления равна нулю
ПОТЕНЦИАЛЬНОЕ СИЛОВОЕ ПОЛЕ Силовым полем называется физическое пространство, удовлетворяющее тому условию, что на точки механической системы, находящейся в этом пространстве, действуют силы, зависящие от положения этих точек или от положения точек и времени (но не от их скоростей). Силовое поле, силы которого не зависят от времени, называется стационарным. Стационарное силовое поле называется потенциальным, если работа сил поля, действующих на механическую систему, не зависит от формы траекторий ее точек и определяется только их начальным и конечным положениями. Эти силы называются силами, имеющими потенциал, или консервативными силами. Приведенное условие выполняется, если существует однозначная функция координат:
работа сил, действующих на точки механической системы в потенциальном поле, равна разности значений силовой функции в конечном и начальном положениях системы и не зависит от формы траекторий точек этой системы.
Работа сил, действующих на точки системы в потенциальном поле на всяком замкнутом перемещении, т. е. на перемещении, при котором начальные и конечные положения для всех точек совмещены, равна нулю, так как в этом случае U2=U1. Введем понятие потенциальной энергии. Потенциальная энергия системы в любом данном ее положении равна сумме работ сил потенциального поля, приложенных к ее точкам на перемещении системы из данного положения в нулевое.
Работа сил приложенных к точкам механической системы, на любом ее перемещении равна разности значений потенциальной энергии в начальном и конечном положениях системы.
Зависимость между силовой функцией и потенциальной энергией механической системы. При перемещении механической системы из данного положения М1, М2..., Мп в нулевое положение М1(0), М2(0), Мп(0) работа приложенных к точкам сил равна потенциальной энергии П системы в этом положении. С другой стороны, эту работу можно определить по формуле как разность значений силовой функции U в нулевом положении и в данном, т. е.
Уравнение определяет некоторую поверхность в пространстве, которая называется поверхностью равного потенциала или эквипотенциальной поверхностью. Установим направление силы поля в каждой точке по отношению к эквипотенциальной поверхности, проходящей через эту точку.
Сила Р направлена в сторону уменьшения значений потенциальной энергии.
1. Поле силы тяжести
уравнения эквипотенциальных поверхностей имеют вид
Потенциальная энергия механической системы, находящейся под действием сил тяжести, равна произведению веса системы на высоту ее центра тяжести над нулевой эквипотенциальной плоскостью.
2. Поле центральной силы
Эквипотенциальные поверхности поля силы притяжения представляют собой сферические поверхности с центром в точке О. Сила притяжения Р направлена по нормали к эквипотенциальной поверхности, проходящей через данную точку, в сторону уменьшения значений потенциальной энергии.
Закон сохранения механической энергии
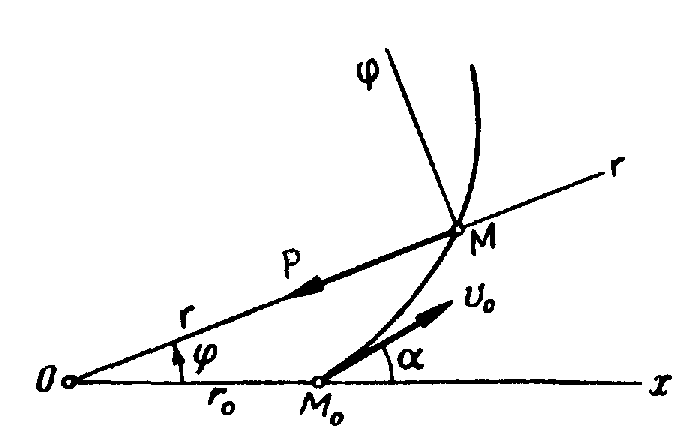
Движение точки под действием центральной силы. Закон площадей. Уравнение Бине.
ДИНАМИКА ПОСТУПАТЕЛЬНОГО И ВРАЩАТЕЛЬНОГО ДВИЖЕНИЙ ТВЕРДОГО ТЕЛА Дифференциальные уравнения поступательного движения твердого тела
Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 1712; Нарушение авторского права страницы








 Движение точки М относительно системы Оξ η ζ называется абсолютным, а движение точки относительно системе Oxyz называется относительным.
Движение точки М относительно системы Оξ η ζ называется абсолютным, а движение точки относительно системе Oxyz называется относительным.
































 Момент инерции твердого тела относительно некоторой оси равен моменту инерции тела относительно параллельной оси, проходящей через его центр тяжести, сложенному с произведением массы тела на квадрат расстояния между осями.
Момент инерции твердого тела относительно некоторой оси равен моменту инерции тела относительно параллельной оси, проходящей через его центр тяжести, сложенному с произведением массы тела на квадрат расстояния между осями.





























































 Lz > 0, если, смотря навстречу оси z, можно видеть проекцию mV1 по отношению к точке О, направленной против движения часовой стрелки, и Lz < 0 — в обратном случае.
Lz > 0, если, смотря навстречу оси z, можно видеть проекцию mV1 по отношению к точке О, направленной против движения часовой стрелки, и Lz < 0 — в обратном случае.




 Если действует система сил, то
Если действует система сил, то  Производная по времени от момента количества движения материальной точки относительно некоторого центра равна геометрической сумме моментов сил, действующих на точку, относительно того же центра.
Производная по времени от момента количества движения материальной точки относительно некоторого центра равна геометрической сумме моментов сил, действующих на точку, относительно того же центра.














 .
.
















































 - дифференциал кинетической энергии материальной точки равен сумме элементарных работ сил, приложенных к точке.
- дифференциал кинетической энергии материальной точки равен сумме элементарных работ сил, приложенных к точке. Изменение кинетической энергии материальной точки на некотором ее перемещении равно
Изменение кинетической энергии материальной точки на некотором ее перемещении равно
















 //
// 

 //
//












 при установившемся движении машины работа движущих сил равна абсолютной величине работы сил сопротивления.
при установившемся движении машины работа движущих сил равна абсолютной величине работы сил сопротивления.







 Отсюда следует, что
Отсюда следует, что
 проекции на координтные оси силы, действующей в потенциальном поле на каждую точку Mi механической системы, равны взятым со знаком минус частным производным от потенциальной энергии системы по соответствующим координатам этой точки.
проекции на координтные оси силы, действующей в потенциальном поле на каждую точку Mi механической системы, равны взятым со знаком минус частным производным от потенциальной энергии системы по соответствующим координатам этой точки.



 следовательно, сила Р направлена по нормали к эквипотенциальной поверхности, проходящей через данную точку.
следовательно, сила Р направлена по нормали к эквипотенциальной поверхности, проходящей через данную точку.




 Сила тяжести направлена перпендикулярно к этим плоскостям в сторону уменьшения значений потенциальной энергии.
Сила тяжести направлена перпендикулярно к этим плоскостям в сторону уменьшения значений потенциальной энергии. 











 (75.2)
(75.2) 


 При движении точки под действием центральной силы площадь, описываемая радиусом-вектором точки, изменяется пропорционально времени. Это положение называется законом площадей.
При движении точки под действием центральной силы площадь, описываемая радиусом-вектором точки, изменяется пропорционально времени. Это положение называется законом площадей.