
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Толщина зуба по делительной окружности
Толщина зуба колеса по делительной окружности определяется шириной впадины инструментальной рейки по станочно-начальной прямой (Рис.3.20), которая при изготовлении колеса перекатывается по его делительной окружности без скольжения.
или в окончательном виде, после несложного преобразования
Во всех формулах расчёта геометрических размеров зубчатых колёс коэффициенты смещения необходимо подставлять со своими знаками.
Вопросы для самопроверки 1. В чём заключается существо основного закона зацепления? 2. Какие профили зубьев колёс называются сопряжёнными? 3. Что такое эвольвента окружности, производящая прямая? 4. Какими свойствами обладает эвольвента окружности? 5. Что такое эвольвентная функция? 6. Назовите элементы зубчатого колеса, какими линиями очерчивается про- филь зуба? 7. Что называется шагом колеса, модулем, головкой, ножкой зуба? 8. В каком месте измеряется толщина зуба, ширина впадины колеса? 9. Какими свойствами обладает делительная окружность? 10. Что такое коэффициент высоты головки зуба, чему он равен? 11. Какая окружность колеса называется основной? 12. Назовите элементы зацепления пары колёс. 13. Что такое полюс зацепления? 14. Какие окружности колёс называются начальными? 15. Что такое угол зацепления? 16. Что такое линия зацепления, активная линия зацепления? 17. Что такое радиальный зазор, за счёт чего он образуется? 18. Сформулируйте свойства эвольвентного зацепления. 19. Какими методами изготавливают эвольвентные зубья, в чём заключается существо методов? Каковы основные достоинства и недостатки методов? 20. Что такое реечный производящий исходный контур(инструментальная рейка)? 21. Что такое подрез зубчатого колеса? 22. Какое число зубьев считается минимальным, от чего оно зависит? 23. Как предотвратить подрез зубчатого колеса? 24. Что такое коэффициент смещения исходного контура? 25. Какие зубчатые колёса называются нулевыми, положительными и отрицательными? 26. Назовите качественные характеристики эвольвентногозацепления. 27. Что называется коэффициентом перекрытия, и что он характеризует? 28. Что такое удельное скольжение, почему возникает скольжение в контакте зубьев? 29. Почему в полюсе зацепления удельное скольжение равно нулю? 30. Что такое коэффициент удельного давления, где он применяется? 31. Для чего назначаются коэффициенты смещения при нарезании зубчатых колёс? 32. Как определяются геометрические размеры зубчатых колёс: угол зацепления, радиусы начальных окружностей, межосевое расстояние, радиусы окружностей впадин, радиусы окружностей вершин и толщина зуба по делительной окружности?
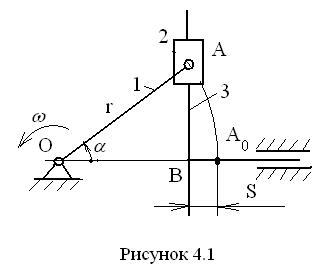
Кинематика механизмов с низшими кинематическими парами В этом разделе изучаются методы исследования кинематики механизмов с низшими парами (или рычажных механизмов). 4.1. Задачи исследования; исходные данные; методы исследования Задачи исследования 1)Определение положений звеньев механизма и определение траекторий отдельных его точек. 2)Определение линейных скоростей точек механизма и угловых скоростей его звеньев. 3)Определение линейных ускорений точек механизма и угловых ускорений его звеньев. Исходные данные Для решения задач кинематики необходимо иметь 1)Кинематическую схему механизма и все кинематические размеры его звеньев. 2)Закон движения входного (ведущего) звена. Методы исследования 1)Аналитический. 2)Графо-аналитический (метод планов положений, скоростей и ускорений). 3)Метод графического дифференцирования. 4)Экспериментальный. Аналитический метод Метод заключается в определении математических выражений, Для составления некоторого первоначального представления о методе рассмотрим кинематику синусного механизма (рис. 4.1). Механизм состоит из кривошипа 1, вращающегося вокруг неподвижной точки О, конец А которого образует вращательную кинематическую пару с ползуном 2. Ползун движется по вертикальному элементу ведомого звена 3, которое движется вдоль неподвижных гоизонтальных направляющих. На первом этапе определяется зависимость перемещения S ведомого звена от угла α 1 поворота ведущего кривошипа 1. Из рис. 4.1 видно, что
Дифференцируя по
дифференцируя во второй раз, получаем аналог ускорения ведомого звена
З а м е ч а н и е . Следует обратить внимание на то, что зависимость
4.3. Метод планов положений, скоростей и ускорений Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 756; Нарушение авторского права страницы
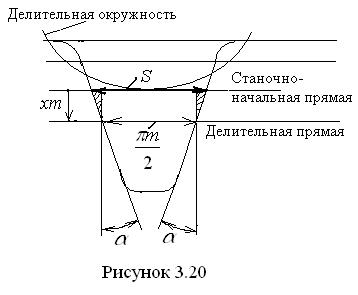 Размер S толщины зуба складывается из ширины
Размер S толщины зуба складывается из ширины  впадины инструментальной рейки по её делительной окружности и двух катетов прямоугольных треугольников, заштрихованных на рисунке 3.20, которые расположены на станочно-начальной прямой рейки. Вертикальные катеты этих треугольников равны
впадины инструментальной рейки по её делительной окружности и двух катетов прямоугольных треугольников, заштрихованных на рисунке 3.20, которые расположены на станочно-начальной прямой рейки. Вертикальные катеты этих треугольников равны  , так как они представляют собой величину смещения инструмента от центра колеса при его нарезании, что, по существу, равно расстоянию между делительной и станочно-начальной прямыми. Каждый горизонтальный катет прямоугольного треугольника равен
, так как они представляют собой величину смещения инструмента от центра колеса при его нарезании, что, по существу, равно расстоянию между делительной и станочно-начальной прямыми. Каждый горизонтальный катет прямоугольного треугольника равен  . С учётом этих соображений толщину зуба S можно выразить так
. С учётом этих соображений толщину зуба S можно выразить так ,
,  .
. описывающих функциональную связь между входными и выходными параметрами механизма. Для этого служат различные приёмы и методы, такие как метод векторных контуров, который образуется заменой кинематических размеров звеньев векторами, с последующим проецированием этого контура на оси системы координат и получением на этой основе соответствующих уравнений, описывающих кинематику данного механизма. Этой же цели служит метод разбиения схемы механизма на прямо- или косоугольные треугольники, решая которые, получают необходимые математические выражения.
описывающих функциональную связь между входными и выходными параметрами механизма. Для этого служат различные приёмы и методы, такие как метод векторных контуров, который образуется заменой кинематических размеров звеньев векторами, с последующим проецированием этого контура на оси системы координат и получением на этой основе соответствующих уравнений, описывающих кинематику данного механизма. Этой же цели служит метод разбиения схемы механизма на прямо- или косоугольные треугольники, решая которые, получают необходимые математические выражения. .
. в первый раз, получаем аналог скорости ведомого звена:
в первый раз, получаем аналог скорости ведомого звена:  ,
,  .
. , отражающая закон преобразования движения в механизме, называется функцией положения механизма. Её первая производная по
, отражающая закон преобразования движения в механизме, называется функцией положения механизма. Её первая производная по  и выполнить дифференцирование по времени
и выполнить дифференцирование по времени  . Попутно обнаруживается и связь между кинематическими функциями и их аналогами.
. Попутно обнаруживается и связь между кинематическими функциями и их аналогами.