|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ПРИНЦИП ДЕЙСТВИЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
В дальнейшем рассмотрим только замкнутые САУ по отклонению (системы автоматического регулирования САР), наиболее распространенные при решении практических задач управления в нефтяной и газовой промышленности.
Рис.11.4. К принципу действия системы автоматического регулирования. Регулирование: а – ручное; б - автоматическое
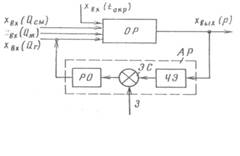
Рассмотрим более подробно принцип действия системы автоматического регулирования на примере системы поддержания постоянного давления в сепараторе.(рис. 11.4). На вход сепаратора поступает газожидкостная смесь в количестве Qсм , которая разделяется на жидкую часть, отбираемую снизу в количестве Qж , и газовую, уходящую сверху сепаратора в количестве Qг . В состоянии равновесия при определенном давлении p в сепараторе расходы уравновешены, т.е. Qсм=Qг+Qж. Основным параметром, определяющим характер технологического процесса в сепараторе, является давление p. При изменении расходов потоков на входе или выходе сепаратора давление в нем будет изменяться. Пусть задача заключается в том, чтобы поддерживать давление в сепараторе на определенном значении. Установим на сепараторе измерительный прибор 1 (манометр) с целью контроля давления и орган управления 2 расходом (задвижку) на газовой линии (рис. 11.4, а). Тогда, в случае уменьшения или увеличения давления, можно наблюдая за показаниями манометра и изменяя положение задвижки, восстанавливать желаемое значение давления в сепараторе. Получим систему регулирования давления. Однако, так как наблюдение за давлением и изменение проходного сечения органа управления проводится человеком, такое регулирование называется ручным. Для получения системы автоматического регулирования функции человека должны быть переданы автоматическому устройству, называемому в этом случае автоматическим регулятором или просто регулятором. РЕГУЛЯТОР Приведем основные понятия и определения, используемые при изучении систем регулирования. Параметр, который необходимо регулировать в ходе технологического процесса, называется регулируемым. Значение регулируемого параметра в любой момент времени называется текущим, а то его значение, которое необходимо поддерживать в процессе, - заданным. Разность между текущим и заданным значением регулируемого параметра называется рассогласованием или отклонением.
Рис.11.5.Функциональная схема системы регулирования давления Основные элементы регулятора – чувствительный элемент, который реагирует на изменение регулируемого параметра, элемент сравнения, который сравнивает текущее значение регулируемого параметра с заданным, устанавливаемым с помощью специального устройства, и регулирующий орган, который оказывает непосредственное воздействие на процесс. В нашем примере система автоматического регулирования будет действовать следующим образом (рис.11.4, б). В случае появления возмущающего воздействия, например при увеличении расхода потока смеси на входе (Qсм), давление в сепараторе (регулируемый параметр) повысится. Автоматический регулятор, сравнивая воздействия на мембрану 1 (элемент сравнения) со стороны давления газа (текущее значение) и со стороны пружины 2 (заданное значение), будет осуществлять регулирующее воздействие, увеличивая проходное сечение регулирующего органа 3 и тем самым уменьшая рассогласование. В этой системе мембрана 1 выполняет также функцию чувствительного элемента. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К САР Если текущее значение регулируемого параметра равно заданному, то считается, что система находится в состоянии равновесия. Если под действием какого-либо возмущения в системе возникло отклонение регулируемого параметра, то ей необходимо некоторое время, чтобы снова прийти в состояние равновесия. Считается, что в течение этого времени система находится в переходном режиме.
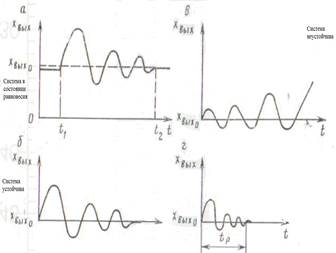
Рис.11.7. Графики переходных процессов в САР Поведение системы в переходном режиме принято изображать в виде графика переходного процесса – зависимости изменения во времени выходной величины (регулируемого параметра) системы (рис.11.7, а). Текущее значение регулируемого параметра на графике обозначено через хвых, и его изменение показано сплошной линией. Так как мы рассматриваем системы стабилизации, то заданное значение хвых0, остается постоянным, чему соответствует пунктирная линия, параллельная оси времени. Совпадение кривых текущего и заданного значений на отрезке времени 0-t, свидетельствует о том, что в этот период система находится в состоянии равновесия. В момент времени t1, под действием возмущения система отклоняется от состояния равовесия и вновь к нему возвращается под действием регулятора к моменту времени t2. В период времени t1-t2 система находится в переходном режиме, а после t2- снова в состоянии равновесия. При исследовании систем принято их рассматривать начиная от момента появления отклонения регулируемого параметра. В этом случае начало координат соответствует заданному значению регулируемого параметра (рис.11.7, б). Однако переходный процесс может иметь другой характер (рис.11.7, в). Сравнивая два графика переходного процесса (рис.11.7, б, в), можно увидеть, что в одном случае система возвращается к состоянию равновесия, а в другом этого не происходит. Считают, что в первом случае система устойчива, а во втором – неустойчива. Так как назначением САР является поддержание регулируемого параметра на заданном значении, то естественно потребовать, чтобы она обеспечивала переходный процесс в соответствии с графиком, приведенным на рис.11.7, б, т.е. была бы устойчивой. Вместе с тем и в устойчивых САР переходный процесс может протекать различно (рис.11.7, г). При этом вводится понятие качества переходного процесса, которое характеризуется рядом показателей. Одним из них является, например, время переходного процесса tp. Естественно, чем меньше это время, тем выше качество САР. Численное значение показателя качества, которое должна обеспечить САР, выбирается исходя из технологических соображений. Таким образом, к системе автоматического регулирования предъявляются два требования: 1) система обязательно должна быть устойчивой и 2) обладать определенным заданным качеством.
Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 677; Нарушение авторского права страницы