
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Моделирование работы экономической системыСтр 1 из 8Следующая ⇒
СОДЕРЖАНИЕ ЛАБОРАТОРНАЯ РАБОТА 1. 5 Моделирование работы экономической системы.. 5 ЛАБОРАТОРНАЯ РАБОТА 2. 15 Геометрическая интерпретация задачи линейного программирования. 15 ЛАБОРАТОРНАЯ РАБОТА 3. 26 Использование теорем двойственности при анализе решения взаимно двойственных задач 26 ЛАБОРАТОРНАЯ РАБОТА 4. 38 Построение и анализ моделей задач транспортного типа. 38 Решение задач нелинейного программирования методом множителей Лагранжа 57 ЛАБОРАТОРНАЯ РАБОТА 6. 65 Элементы теории игр в задачах моделирования. 65 ЛАБОРАТОРНАЯ РАБОТА 7. 81 Случайные процессы с дискретным состоянием. Уравнения Колмогорова для стационарного режима. 81 Задачи теории систем массового обслуживания. 85 ЛАБОРАТОРНАЯ РАБОТА 9. 89 Моделирование работы системы массового обслуживания с очередью.. 89 ЛАБОРАТОРНАЯ РАБОТА 10. 94 Использование метода штрафных функций для решения задач математического программирования. 94 ЛАБОРАТОРНАЯ РАБОТА 1 Моделирование работы экономической системы Цель и содержание: Построение модели планирования производства. Использование инструментального средства «Поиск решения» для решения задачи линейного программирования.
Теоретическое обоснование Изучите теоретический материал по данной теме, используя литературу [1, 2] и материал изложенный ниже. Пример решения задачи математического программирования Пример решения задачи математического программирования с использованием методов математического анализа, известных из курса средней школы. Условие. Найти размеры цилиндрической закрытой цистерны с заданным объемом V и с наименьшей полной поверхностью. Решение. Запишем математическую модель решаемой задачи. Для этого введем следующие обозначения: r – радиус, h – высота, S – полная поверхность цилиндра, тогда выражение для целевой функции будет иметь вид: S=2pr2+2prh. Учитывая, что объем цилиндра V=pr2h, выразим h: h=V/pr2 .Заменим в целевой функции h на полученное выражение. Окончательно математическая модель данной задачи будет иметь вид: S=2(pr2+V/r)(min) при ограничениях: r> 0. Для того чтобы найти min целевой функции на области допустимых решений, которые в нашем случае представляют собой интервал (0; +¥ ), определяем критические точки. Для определения критических точек необходимо продифференцировать целевую функцию по независимой переменной r, т. е. найти первую производную целевой функции по переменной r: Чтобы с помощью MathСad найти значение производной функции по переменной, необходимо: 1. Ввести выражение функции в виде: 2 (p r2+V/r). 2. Выделить переменную, по которой будет производиться дифференцирование: 2· (p· r2+V/r). 3. В меню Symbolic (Символика) активизировать команду Differentiate on Variable (Дифференцировать по переменной). 4. Под выражением функции появится значение производной в виде: 2(2pr-V/r2). 5. Выделить все выражение и в меню Symbolic (Символика) с помощью команды Simplity (Упростить) преобразовать его к виду: 2(2pr2-V)/r2 . 6. Приравнять значение производной к нулю и найти критическую точку. С помощью MathСad можно не записывать S'=0, а выделив переменную, относительно которой надо решить уравнение в меню Symbolic (Символика), активизировать команду Решить относительно переменной . Окончательно получим для r: Чтобы установить является ли эта точка точкой минимума, исследуем ее по знаку второй производной. Для этого продифференцируем S' (пункт 4) по переменной r, действия аналогичны пунктам 2 и 3. Получим S = 4(p+V/r3). Определим знак S'', подставив вместо r его выражение r= Следовательно, критическая точка r= При r= Делаем вывод: цилиндрическая закрытая цистерна, имеющая любой заданный V, будет иметь наименьшую полную поверхность, если ее осевое сечение представляет квадрат. Содержание отчета и его форма Подготовьте отчет, в котором опишите технологию решения задач линейного программирования средствами Excel, используя задания своего варианта. Отчет по лабораторной работе должен содержать: 1) название работы; 2) цель лабораторной работы; 3) условие и решение задач; 4) технологию решения задач с помощью прикладного программного обеспечения; 5) ответы на контрольные вопросы. Вопросы для защиты работы 1. Дайте определение математического программирования. 2. Что называется математической моделью оптимизационной задачи? 3. Как строится математическая модель? 4. Как перейти от неравенств к уравнениям? 5. Какие переменные называются дополнительными (слабыми)? 6. Расскажите известные вам методы непосредственного решения простейших оптимизационных задач.
ЛАБОРАТОРНАЯ РАБОТА 2 Теоретическое обоснование Изучите теоретический материал по данной теме, используя материал изложенный ниже. Рассмотрим геометрический метод решения задачи линейного программирования для случая, когда целевая функция и ограничения содержат две переменные. Пусть необходимо найти: при ограничениях: Построим многоугольник решений, для этого каждое неравенство представим в виде равенства и изобразим полученные прямые на графике: Прямые, пересекаясь между собой, образуют многоугольник (рисунок 2.1). Линейная функция F может принимать минимальное или максимальное значения только в вершинах многоугольника решений. Построим линии уровня целевой функции, для этого первоначально изобразим прямую: c1x1+c2x2=0(F0), проходящую через начало координат и перпендикулярную вектору нормали N (с1; с2). Передвигая эту прямую параллельно самой себе в положительном направлении вектора N определим, в какой вершине многоугольника решений эта прямая будет опорной. Функция F принимает наименьшее значение в той вершине многоугольника решений, с которой она впервые соприкасается, при движении прямой F0 в положительном направлении вектора N. В этом положении прямая F становится опорной прямой F1. При дальнейшем движении в том же направлении (положительном) прямая F пройдет через другую вершину многоугольника решений, выходя из области решений, и станет опорной прямой F2. В этой вершине функция F принимает наибольшее значение. Рисунок 2.1 – Схематическое изображение многоугольника решений, вектора нормали и линий уровня целевой функции
Таким образом, минимальное и максимальное значения линейная функция F=c1x1+c2x2 на многоугольнике решений принимает в точках пересечения этого многоугольника с опорными прямыми, перпендикулярными вектору N (c1; c2). Опорная прямая может иметь с многоугольником решений либо одну общую точку (вершину многоугольника), либо бесконечное множество точек (это множество есть сторона многоугольника). Аналогично, линейная функция трех переменных принимает постоянное значение из плоскости, перпендикулярной вектору F=c1x1+c2x2+c3х3. Наименьшее и наибольшее значения этой функции на многограннике решений достигаются в точках пересечения этого многогранника с опорными плоскостями, перпендикулярными вектору N (c1; c2; c3). Опорная плоскость может иметь с многогранником решений либо одну общую точку (вершину многогранника), либо бесконечное множество точек (это множество есть ребро или грань многогранника). Рассмотрим графический метод решения задачи линейного программирования для случая, когда целевая функция и ограничения содержат две переменные. Задача. Пусть необходимо найти:
при ограничениях:
Решение. Построим многоугольник решений, для этого каждое неравенство представим в виде равенства и изобразим полученные прямые на графике:
Прямые ограничения (IV) означают, что область решений будет лежать в первой четверти декартовой системы координат; отметим штриховкой эту область на рисунке 2.2. Определим множество решений первого неравенства. Оно состоит из решения уравнения и строгого неравенства. Решением уравнения служат точки прямой x1 +3х2 – 21=0. Построим прямую по двум точкам (0; 7) и Аналогичным образом построим области решения двух других неравенств. Заштрихуем общую область для всех неравенств, обозначим вершины многоугольника латинскими буквами.
Рисунок 2.2 – Решение задачи линейного программирования графическим методом
Построим линии уровня целевой функции, для этого приравняем целевую функцию постоянной величине а: 30х1 + 60х2 =а. Это уравнение является множеством точек, в котором целевая функция принимает значение, равное а. Меняя значение а, получим семейство параллельных прямых, каждая из которых называется линией уровня . Пусть а=0, вычислим координаты двух точек, удовлетворяющих соответствующему уравнению 30х1 + 60х2 = 0. В качестве одной из этих точек удобно взять точку 0(0: 0), а так как при х1 = 2, х2= –1, то в качестве второй точки возьмем точку G(2; –1). Через эти две точки проведем линию уровня F(x) = 30х1 + 60х2 = 0 (пунктирная прямая на рис. 2.2). Для определения направления возрастания целевой функции построим градиент целевой функции Ñ (вектор нормали), координаты которого являются частными производными функции F(x), то есть Ñ = (с1, с2) = (30; 60). Чтобы построить этот вектор, нужно соединить точку (30; 60) с началом координат. При максимизации целевой функции необходимо двигаться в направлении вектора-градиента, а при минимизации в противоположном направлении. Для удобства можно строить вектор, пропорциональный вектору Ñ. Так, на рисунке 2.2. изображен вектор 1/3Ñ = (10; 20). В нашем случае движение линии уровня будем осуществлять до ее пересечения с точкой В; далее она выходит из области допустимых решений. Следовательно, именно в этой точке достигается максимум целевой функции. Для определения координат точки В решим систему уравнений двух пересекающихся соответствующих прямых: второй и первой, получим В(3; 6). Теперь легко получить решение исходной задачи Fmax(х)=450 и достигается при X·=(3; 6). Если поставить задачу минимизации функции F(х) при тех же ограничениях, линию уровня необходимо смещать параллельно самой себе в направлении, противоположном градиенту Ñ. Как это видно на рисунке 2.2, минимум целевой функции достигается в точке 0(0: 0), следовательно, можно записать Fmin(х)=0 и достигается при X·=(0; 0). При решении некоторых задач линейного программирования графическим методом может встретиться случай, когда линия уровня параллельна одной из сторон выпуклого многоугольника допустимых решений, причем эта сторона расположена в направлении смещения линии уровня при стремлении целевой функции к своему оптимуму. В этом случае оптимальное значение целевой функции достигается не в одной, а в двух угловых точках (вершинах) многоугольника решений и, следовательно, во всех точках отрезка, соединяющего эти вершины, т. е. задача будет иметь бесчисленное множество решений. Если область допустимых решений является незамкнутым выпуклым многоугольником в направлении оптимизации целевой функции, то целевая функция будет неограниченной и задача линейного программирования не будет иметь решений; в этом случае условно можно записать, что, например, Fmax(х) = +¥. Очевидно также, что задача линейного программирования не будет иметь решений в случае, когда область допустимых решений есть пустое множество, т. е. система ограничений задачи линейного программирования содержит противоречивые неравенства, и на координатной плоскости нет ни одной точки, удовлетворяющей этим ограничениям. Задачи линейного программирования самого различного смысла допускают одинаковую интерпретацию и, построив математическую модель, легко найти решение задачи с помощью, например, табличного процессора Excel. Аппаратура и материалы. Для выполнения лабораторной работы необходим персональный компьютер с характеристиками, позволяющими установить операционную систему Windows XР, интегрированный пакет Microsoft Officе. Указания по технике безопасности. Самостоятельно не производить: установку и удаление программного обеспечения; ремонт персонального компьютера. Соблюдать правила технической эксплуатации и техники безопасности при работе с электрооборудованием. Содержание отчета и его форма Подготовьте отчет, в котором опишите технологию решения задач линейного программирования средствами Excel, используя задания своего варианта. Отчет по лабораторной работе должен содержать: 1) название работы; 2) цель лабораторной работы; 3) условия выполненных заданий и их решение; 4) выводы; 5) ответы на контрольные вопросы. Вопросы для защиты работы: 1. Как построить многоугольник решений? 2. Как построить линию уровня? 3. В каких точках достигается минимизация и максимизация линейной функции? 4. Сколько общих точек может иметь опорная прямая с многоугольником решений.
ЛАБОРАТОРНАЯ РАБОТА 3 Теоретическое обоснование Изучите теоретический материал по данной теме. Для каждой задачи линейного программирования можно построить другую задачу, называемую двойственной. Понятие двойственности дает ощутимые практические результаты при построении алгоритмов решения задач линейного программирования. Запишем обе задачи:
Симметричность обеих задач очевидна. Неравенству первой задачи соответствует не отрицательность переменной во второй. Равенству одной задачи соответствует свободная переменная другой, задача двойственная к двойственной есть исходная (прямая) задача. Таким образом: Во взаимно-двойственных задачах всегда: 1. Одна из задач является задачей (max), а другая – задачей (min), в системе ограничений задачи (max) неравенств записаны со знаком ≤ , а в системе ограничений задачи (min) – со знаком ≥. 2. Каждому ограничению одной задачи соответствует переменная 3. Коэффициенты целевой функции одной задачи соответственно равны свободным членам системы ограничений другой задачи. 4. Матрица условий одной задачи получается из матрицы условий другой задачи с помощью транспонирования. Взаимно-двойственными являются следующие задачи:
Канонический вид
Пример. Рассмотрим пару двойственных задач.
Запишем матрицы соответствующих задач:
A
Наиболее часто встречаются следующие частные случаи взаимно-двойственных задач: 1) если I = 0, а 2) если Рассмотрим симметричную пару двойственных задач.
Рассмотрим несимметричные двойственные задачи. В несимметричных двойственных задачах система ограничений исходной задачи задается в виде неравенств, причем в последней переменные могут быть отрицательными.
Простейшие свойства взаимно однозначных двойственных задач: - если x допустимое решение прямой задачи, а y допустимое решение двойственной задачи, то - если x и y допустимые решения прямой задачи и двойственной задачи, и Содержание отчета и его форма Подготовьте отчет, в котором опишите технологию решения задач линейного программирования средствами Excel, используя задания своего варианта. Отчет по лабораторной работе должен содержать: 1) название работы; 2) цель лабораторной работы; 3) условия выполненных заданий и их решение; 4) выводы; 5) ответы на контрольные вопросы. Вопросы для защиты работы: 1. В чем заключается сущность двойственности в линейном программировании? 2. Сформулируйте 1-ю и 2-ю теорему двойственности. 3. Какие задачи линейного программирования относятся к симметричным и несимметричным? В чем их отличие? 4. Как по решению исходной задачи найти решение двойственной и наоборот? ЛАБОРАТОРНАЯ РАБОТА 4 Теоретическое обоснование Изучите теоретический материал по данной теме, используя материал изложенный ниже. Классические транспортные задачи относятся к области линейного программирования, и математический аппарат решения этих задач хорошо отработан и известен. Сфера применения моделей задач транспортного типа обширна. Сюда можно отнести проблемы, например, связанные с планированием производства и перевозок, с созданием вычислительных и информационных систем, с распределениями ресурсов, запасов и так далее, то есть в формальных терминах транспортной задачи формируется большое число задач, отнюдь не связанных с перевозками продуктов. Сформулируем математическую модель транспортной задачи. Некоторый однородный продукт, сосредоточенный у т поставщиков А в количестве аi (i = 1, 2, ..., т) единиц соответственно, необходимо доставить п потребителям В в количестве bj (j = 1, 2, ..., n) единиц. Известна стоимость Cij перевозки единицы груза от i-го поставщика к j-у потребителю. Необходимо составить план перевозок, позволяющий вывезти все грузы, полностью удовлетворить потребности и имеющий минимальную стоимость. Обозначим через xij количество единиц груза, запланированных к перевозке от i-го поставщика к j-у потребителю; тогда условие задачи можно записать в виде таблицы 4.1, которую в дальнейшем называют матрицей планирования. Таблица 4.1 – Матрица планирования
Составим математическую модель задачи. Так как от i-го поставщика к j-у потребителю запланировано к перевозке xij единиц груза, то стоимость перевозки составит cijxij. Стоимость всего плана выразится двойной суммой:
Систему ограничений получим из следующих условий задачи: а) все грузы должны быть вывезены, то есть,
эти уравнения получаются из строк таблицы 4.1; б) все потребности должны быть удовлетворены, то есть,
уравнения получаются из столбцов таблицы 4.1. Таким образом, математическая модель транспортной задачи имеет следующий вид. Найти наименьшее значение функции:
при ограничениях:
В рассмотренной модели предполагается, что суммарные запасы равны суммарным потребностям, то есть
Такая модель называется закрытой. Рассмотрим пример построения математической модели транспортной задачи и методы построения опорного плана. Пример. Четыре предприятия могут производить некоторую однородную продукцию в количестве соответственно 100, 250, 200 и 300. На эту продукцию есть заказ от пяти потребителей соответственно в количестве 200, 200, 100, 100 и 250. Затраты с производством и доставкой единицы продукции задаются матрицей:
Составьте математическую модель задачи и найдите опорный план перевозок методом северо-западного угла, при котором общая стоимость перевозок является минимальной. Параметры поиска решения При поиске оптимальных решений смысл этих параметров знать не обязательно, т.к. их значения, применяемые по умолчанию, обеспечивают нормальное решение практических задач. Все необходимые сведения о параметрах и командах, вводимых в этом диалоговом окне, можно получить, вызвав справку. Основные параметры, смысл которых очевиден, а их назначение не требует специальных знаний, приведены ниже: - максимальное время по умолчанию = 100; - предельное число итераций = 100. Если этих значений для нахождения решения окажется не достаточно, то на экране появится соответствующее сообщение, после чего вычисления можно повторить при тех же параметрах без их повторного назначения. В качестве относительной погрешности используется по умолчанию величина 0, 000001, обеспечивающая достаточно высокую точность решения. Заметим, что снижение точности уменьшает число итераций и сокращает время поиска решения. Анализ оптимального решения После успешного завершения поиска оптимальных решений на экране появится диалоговое окно Результаты поиска решения. С помощью него можно вызвать отчеты трех типов: - отчет по результатам (состоящий из трех таблиц: сведения о целевой функции, значение переменных, результаты оптимальных решений для ограничений и граничных условий); - отчет по пределам (состоящий из двух таблиц: значение x в оптимальном решении, нижние пределы изменения значения x); - отчет по устойчивости (состоящий из двух таблиц: значение для переменных (результат решения задачи, нормированный градиент, величина приводимая при выборе некоторых методов в диалоговом окне, параметров поиска решения, величина стоимости, множитель Лагранжа). Рассмотрим алгоритм решения транспортной задачи помощью Excel на примере Пример. На 3-х железнодорожных станциях А1, A2 и А3 скопилось 120, 110 и 130 незагруженных вагонов. Эти вагоны необходимо перегнать на станции B1 – B5. На каждой из этих станций потребность в вагонах соответственно равна 80, 60, 70, 100 и 50. Учитывая, что со станции А2 не представляется возможным перегнать вагоны на станции В2 и В4 и зная, что тарифы перегонки одного вагона определяются матрицей:
Составьте такой план перегонок вагонов, чтобы общая стоимость была минимальной. Решение. Методом двойного предпочтения получим следующий опорный план в виде таблицы 4.7, Таблица 4.7 – Построение первоначального опорного плана транспортной задачи методом двойного предпочтения
где x 11=20, x 13=70, x 14=30, x 21=60, x 25=50, x 32=60, x 34=70. Таким образом, согласно данному плану перевозок, общая стоимость перевозок всего груза составила: Z = 20·2+70·1+30·6+60·3+50·2+60·3+70·3 = 960 (ед.). Определим, является найденный нами план оптимальным, используя инструмент Поиск решения табличного процессора Excel. Для этого необходимо: 1. Создать таблицу согласно условию задачи (например, диапазон A1: G8, рисунок 4.1).
Рисунок 4.1 – Матрица стоимостей 2. Заполнить диапазон ячеек, которые необходимо изменять и в которые будут выводиться значения количества перевозок нулями (например, диапазон I2: M4, рисунок 4.2).
3. Записать целевую функцию, например, в ячейку I6, рисунок 4.3. Можно формулу набирать с помощью клавиатуры: установить курсор в ячейку; набрать значок «=«, щелкнуть мышкой в ячейке B3, набрать значок «·» щелкнуть мышкой в ячейке I2, набрать значок «+»; и т.д. или вставить формулу СУММПРОИЗ из категории Математические Мастера функций и в качестве первого массива указать адрес блока ячеек (А3: F7), содержащего таблицу стоимостей, а вторым массивом указать адрес (I2: M4) ячеек таблицы, где находятся искомые переменные. 4. Ввести ограничения по наличию запасов и потребностей в ячейки I8: I15, аналогично вводу целевой функции (обратите внимание на формулу в ячейке I8, рисунок 4.4) или, используя формулу СУММ из категории Математические Мастера функций.
5. Найти оптимальный план задачи с помощью инструментального средства Поиск решения. Аппаратура и материалы. Для выполнения лабораторной работы необходим персональный компьютер с характеристиками, позволяющими установить операционную систему Windows XР, интегрированный пакет Microsoft Officе. Указания по технике безопасности. Самостоятельно не производить установку и удаление программного обеспечения; ремонт персонального компьютера. Соблюдать правила технической эксплуатации и техники безопасности при работе с электрооборудованием. Содержание отчета и его форма Подготовьте отчет, в котором опишите технологию решения задач линейного программирования средствами Excel, используя задания своего варианта. Отчет по лабораторной работе должен содержать: 1) название работы; 2) цель лабораторной работы; 3) условия выполненных заданий и их решение; 4) выводы; 5) ответы на контрольные вопросы. Вопросы для защиты работы: 1. Сформулировать транспортную задачу в общем виде. 2. Сформулировать алгоритм нахождения первоначального опорного плана транспортной задачи методом северо-западного угла. 3. Сформулировать алгоритм нахождения первоначального опорного плана транспортной задачи методом минимальной стоимости. 4. Сформулировать алгоритм нахождения первоначального опорного плана транспортной задачи методом двойного предпочтения. 5. Как проверить найденный план на оптимальность? ЛАБОРАТОРНАЯ РАБОТА 5 Теоретическое обоснование Изучите теоретический материал по данной теме, используя материал изложенный ниже. Предметом нелинейного программирования является класс экстремальных задач, в которых критерий эффективности и (или) система ограничений задаются нелинейными функциями. Интерес к решению задач нелинейного программирования связан с вопросами моделирования процессов, выработки оптимальных вариантов каких либо действий и принятия на их основе управленческих решений. При этом исследованию подлежат проблемы существования, структура и эффективные алгоритмы отыскания решений. В 1951 американские математики Г.Кун и А.Таккер заложили основы теории нелинейного программирования, обобщив классические принципы Эйлера – Лагранжа решения гладких экстремальных задач с ограничениями равенствами. Современное развитие нелинейного программирования характеризуется двумя противоборствующими тенденциями: 1. Исследование все более специальных классов задач (в соответствии с разнообразными потребностями приложений). 2. Возникновением единой, обширной теории экстремальных задач в общих пространствах. Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 563; Нарушение авторского права страницы
 .
. . Полученная точка является критической.
. Полученная точка является критической. , получим S''=12p > 0.
, получим S''=12p > 0.


 ,
, 
 ,
, 
 ,
,  ,
, 
 ,
, 
 ,
, 
 ,
, 
 другой задачи: номер переменной совпадает с номером ограничения, при этом ограничению, записанному в виде неравенства, соответствует переменная, связанная условием неотрицательности.
другой задачи: номер переменной совпадает с номером ограничения, при этом ограничению, записанному в виде неравенства, соответствует переменная, связанная условием неотрицательности. (min)
(min)
 (max)
(max)
 ,
, 
 ,
, 
 ,
, 



 ,
,  . C =
. C =  ;
;  ;
;  ; ВТ=
; ВТ=  ;
;  =
=  .
. , то имеем симметричную пару;
, то имеем симметричную пару;  , а
, а  (max)
(max)
 (min)
(min)
 ,
, 
 ,
,  (max)
(max)
 ,
, 
 ;
;  , то x и y – оптимальные решения этих задач.
, то x и y – оптимальные решения этих задач.
 , (i = 1, 2, ..., m),
, (i = 1, 2, ..., m),  , (j = 1, 2, ..., n),
, (j = 1, 2, ..., n),  (4.1)
(4.1) (4.2)
(4.2) .
. .
. .
.
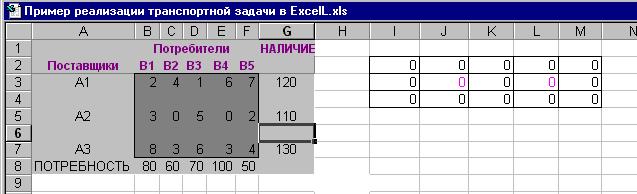 Рисунок 4.2 – Матрица стоимостей (A1: G8 )и матрица перевозок (I2: M4 )
Рисунок 4.2 – Матрица стоимостей (A1: G8 )и матрица перевозок (I2: M4 )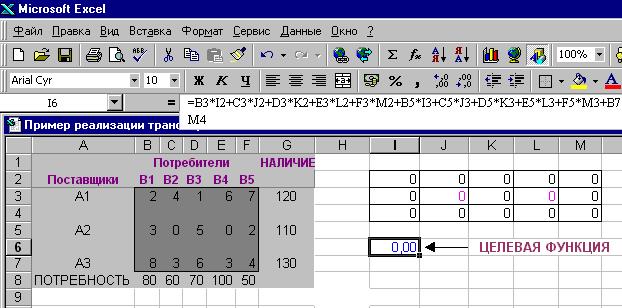 Рисунок 4.3 – Ввод формулы целевой функции
Рисунок 4.3 – Ввод формулы целевой функции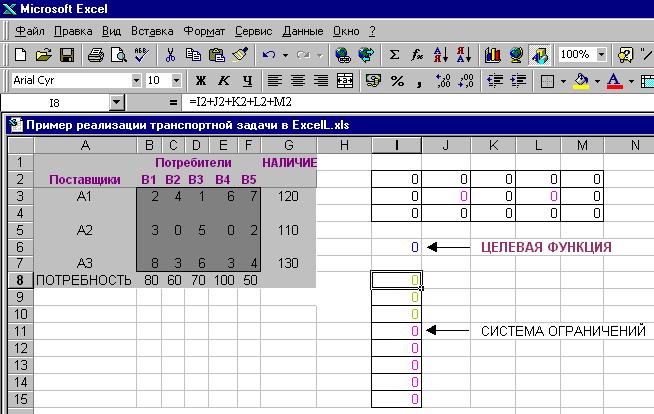 Рисунок 4.4 – Ввод условий ограничений
Рисунок 4.4 – Ввод условий ограничений