
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Бесконтактные датчики положения
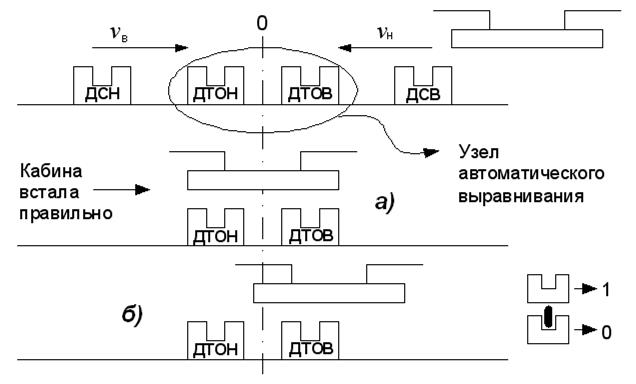
Индуктивные. Работа основана на изменении индуктивного сопротивления катушек со стальным сердечником при изменении воздушного зазора в магнитной цепи. 1 – сердечник; 2 – катушка; 3 - шунт (скоба, флажок). У катушки XL мало => ток большой при разомкнутой магнитной системе. При замыкании магнитной системы увеличивается XL, уменьшается ток. Типы: ИКВ – на лифтах, ИД – в металлических цехах при температуре 80˚ С, БСП – станочные, малогабаритные путевые выключатели с бесконтактным выходом на логический элемент, ВКБ – высокоточный индуктивный датчик с П-образным плоским якорем, ВПБ – станочные претензионные индуктивные датчики. Генераторные: - щелевые; - плоскостные. В корпусе размещены транзисторные элементы датчиков (генератор и триггер). Когда через щель проходит металлическая пластина, происходит срыв генерации и переключение триггера – датчик сработает. Типы: КБД – щелевые, КВП – плоскостные, генераторные датчики на интегральных микросхемах ПИЩ, ПИП; БВК – при введении пластины в зазор изменяется Кос, возникает генерация и появляется выходное напряжение достаточное для срабатывания реле или логического элемента; БДП – как БВК, но цилиндрической формы, датчик срабатывает при движении вдоль торца, цилиндра. Магнитогерконовые датчики. Имеют одноблочную конструкцию. В корпусе размещены геркон и =-й магнит. При шунтировании магнитного потока встроенного постоянного магнита геркон срабатывает. Типы: ДПЭ (лифты, подъемники), ВСГ (малогабаритные), ДПЛ. Фотоэлектронные датчики и командоаппараты – на базе унифицированных фотореле (ФРСУ-11). Все реле работают с осветителем, который реагирует на излучение металла, нагретого до 300 º С. Реле имеют 3 выхода: бесконтактный с релейной характеристикой; бесконтактный для подключения реле; контактный со встроенным реле РПУ. Выпускаемые фотореле не могут обеспечить высокой точности фиксации положения. Бесконтактные фотоэлектронные командоаппараты (ВПФ-11-01) – для замены контактных типа КА. Дискретные датчики перемещения: фотоэлектронные, импульсные – ПДФ (эти датчики преобразуют значение угла поворота вала в число импульсов); ПКФ – для контроля положения используется цифровой позиционно-кодовый преобразователь (вал - цифра). 3 Автоматическое выравнивание у уровня т.о.. Автоматическое выравнивание применяется с целью увеличения производительности. В основе цикловой автоматизации лежит автоматическое управление скоростью. Позиционная авт-ция требует автоматического управления положением механизма на всех этапах работы, которые при цикловой автоматизации используются лишь при автоматическом выравнивании РО. Узел автоматического выравнивания уровня точной остановки при цикловой автоматизации (с помощью индуктивных датчиков) – в альбоме (стр. 28, рис.1.26). Схема расстановки датчиков:
ДСН(В) – датчик селекции назад (вперед); ДТО – датчик точной остановки. Альбом (стр. 28, рис.1.26): устанавливают 2 индуктивных датчика предварительного снижения скорости и два датчика точной остановки (ДТН, ДТВ). РИТВ, РИТН – импульсные реле тока; включены через выпрямительные мосты, цепи катушек индуктивных датчиков. РТО – реле точной остановки; подключается, когда срабатывают датчики ТО и контактами включают узел автоматического выравнивания. При движении между этажами узел не работает, а в зоне ТО подключается. Сравниваются потенциалы точек 1 и 2. В случае (а), когда шунт перекрывает оба датчика – φ 1=φ 2 4 Замкнутые системы обеспечения т.о.. Замкнутые системы – для высокоточных позиционных ЭП. Основу их структуры составляют замкнутые по пути системы регулирования положения. Находит применение как привод пост., так и перем. тока. Широко используется система тиристорный преобразователь – ДПТ для цикловой автоматизации, т.е. системы подчиненного регулирования по току, скорости, пути. Примеры построения – стр.206-212, Ключев, Терехов. При позиционной автоматизации ТПМ циклического действия предусматривается автоматическое программное управление положением механизма, которое отрабатывается либо шаговым, либо следящим ЭП с непрерывным цифровым или аналоговым контролем положения. Такое управление характерно для промышленных роботов и манипуляторов. 5 Влияние параметров и вида тахограмм на комфортность и производительность ПМ Характерная тахограмма:
Требования ограничения ускорения предъявляются по причинам: 1) для лифтов - адоп ограничивается значением комфортного ускорения; 2) для кранов – снижением максимально допустимых нагрузок на металлоконструкции и необходимостью снижения колебаний в упругих элементах. Для лифтов первым характерным режимом явл. поэтажный разъезд. Суммарный путь разгона и торможения > 3 м.
А - точка замедления; 1 – пустая кабина; 2 – загруженная; 3 – со смещением. При разработке узла смещения точки замедления использован дискретный принцип: - 300-700 кг. 0.1-0.15 с.; - 700-1000 кг. – вверх 0.2-0.25; -0-300 кг. –вниз 0.2-0.25 с. При такой реализации время дотягивания сократилось с 3 с. до 0.5 с., а производительность увеличилась на 10%. Производительность пассаж. лифтов – (чел/час одновременно в обоих направлениях):
где
Вывод: Анализ показывает. что увеличение только грузоподъемности ( Поэтому для высотных зданий для обеспечения пропускной способности необходимо применение подъемников с повышенными скоростями движения. Тема: Обзор АЭП позиционных механизмов. 1 Выбор системы ЭП при позиционировании. 2 Обзор, краткий анализ системы ТПМПТ. 3 Схемы типовых систем АЭП ТПМпт. 3.1 Основные узлы схемы управления многопозиционных подъемников. 3.2 Типовой АЭП пассаж. быстроходного лифта. 3.3 Типовой АЭП пассаж. скоростного лифта. 3.4 Реализация систем дискретной автоматики, формирования команд управления ЭП лифтов. 3.5 Системы АЭП ШПМ. 1 Выбор системы ЭП при позиционировании. Технологические требования к ЭП механизмов цикловой автоматизации: - точная остановка т.е. диапазон регулирования; - ограничение ускорения и рывков т.е. опред. динамические качества ЭП. Поэтому система ЭП должна быть простыми и надежными из-за массовости применения. Варианты: 1) АД КЗ – для механизмов, рабочая скорость которых мала до 1 м/с; 2)АД многоскоростные D=10; 3)АД-ТРН D=10; 4) ДПТ и схемы шунтирования якоря D=10; 5) УВ-ДПТ D=10-50; 1-4 не обеспечивают поддержание ускорения на уровне допуст. и пост. (т.е. 5-обеспечивает непрерывное и точное управление скоростью на всех этапах цикла и обеспечивает жесткие требования к поддержанию ускорения на уровне допустимом и постоянном. Позиционная автоматизация: 1) шаговый ЭП; 2) следящий ЭП с цифровым и аналоговым контролированием положения 1 и 2 - программное управление. 2 Обзор, краткий анализ систем ТПМПТ . 1) АД КЗ –D = 1: 1 - тихоходный грузовой, пассажирский лифт; 2) АД ФР –D = 1: 1 – тихоходный грузовой, пассажирский лифт; 3) АД двухскоростной D = 3(: 6): 1 –тихоходный и быстроходный лифты; 4) Двухдвигательный АД – D = 5: 1 – быстроходные редукторные; 5) Асинхроннчй ЭП с асинхронной электромагнитной муфтой и тормозным генератором – D =10: 1, скоростные; 6) АД двухскоростной с микроприводом -D = 10: 1 –быстроходный с высокой точностью остановки; 7) ЭП постоянного тока по системе Г-Д с управлением в О. В. генератора, редукторный или безредукторный – D = 10: 1; скор., высокоскоростной; 8) Управляемый преобразователь – ДПТ –D = 10: 1 –высокоскоростной, редукторный или безредукторный; 9) ЭП переменного тока для лифтов со скоростью до 2 м/с. Шахтные подъемные машины: 1) АД ФР (Р=1000-1200 кВт); 2) Г-Д (Р> 1200 кВт) – рудные шахты; 3) ТП-Д 4) Частотное регулирование скорости двигателей; 5) АВК – АД с ФР, выпрямитель, инвертор, транзистор. 3 Схемы типовых систем АЭП ТПМпт. Все фиксированные положения подъемных кабин лифтов расположены на одной линии – облегчает реализацию их цикловой работы – цикловая автоматизация. Принципы построения схем сходны для различных подъемников. Наиболее полная автоматизация характерна для пассажирских лифтов. 3.1 Основные узлы схемы управления многопозиционных подъемников. Схема управления лифтов включает узлы: 1) Контроль положения кабины в шахте; 2) Узел автоматического выбора направления движения; 3) Узел торможения; 4) Узел точной остановки; 5) Узел автоматического открытия и закрытия дверей.
При собирательном управлении схема воспринимает одновременно несколько команд и выполняет их в определенной очередности (в порядке следования этажей). Собирательное управление может быть частичное (с определенными ограничениями) и полное (без ограничений). Собирательное управление обеспечивает высокую производительность и применяется в зданиях с большим потоком пассажиров. Узел контроля положения кабины в шахте . Устройство, выполняющее эту функцию селектор. Варианты селекторов: а) Размещение на уровне каждого этажа в шахте этажных переключателей (простейший тип). Этажные переключатели (ЭП) переключаются с помощью специальной отводки (скобы), которая располагается на кабине. Положение рычага ЭП дает информацию о положении кабины. При прохождении кабины через этаж скоба перекидывает рычаг ЭП и переключает его контакты, осуществляющие управление в схеме. б) Контроль положения кабины с помощью копировальных аппаратов (механических селекторов). Это компактно размещающийся в машинном помещении копир-аппарат, который соединен с кабиной цепью (тросом) и в масштабе 1: 59 повторяет движения кабины в круговой развертке и с помощью кулачковых контактов выполняет те же переключения. Достоинства – плавная и бесшумная работа. Недостатки – косвенный контроль положения через механизм передачи, следовательно, необходимо предусматривать меры, не допускающие нарушения синхронизации; уменьшенный масштаб воспроизводимого движения кабины уменьшает выполнение точной остановки.
в) Электрические селекторы с бесконтактными датчиками положения (индуктивные. Строятся в 2-х исполнениях: - с применением контактных реле (релейные селекторы); - с применением бесконтактных логических элементов (бесконтактные селекторы). Для построения схемы электрического селектора любого типа используются одна и та же диаграмма работы датчиков селекции. Пример построения диаграммы – альбом стр.29. РИС – реле импульсной селекции - выдает Uc1-Uc4; РС1-РС4 – выдает Uc`1-Uc`4. Cм. также альбом стр. 30, рис 1.28, рис 1.30а, стр. 32, лаб. раб. №7. В узел входят аппараты, которые обеспечивают подключение главного ЭП вперед/назад – контакторы КВ, КН ( рис. 1.28 ), РУВ, РУН (рис.1.30а). Автоматический выбор направления движения обеспечивают цепи питания на эти элементы, которые собираются с помощью блок-контактов этажных переключателей или контактов реле импульсной селекции, подключенных на выходе датчиков селекции.
3.2 Типовой АЭП пассаж. быстроходного лифта ( л.р№7, альбом стр. 31-33). 3.3 Типовой АЭП пассаж. скоростного лифта. 1) Один из вариантов реализации – ЭП пост. тока – разработка ВНИИ «электропривод» для лифтов со скоростью. 2.4 м/с и грузоподъем. 1000 кг. Блок-схема системы управления – альбом стр. 35) 2) Другой вариант реализации ТРН-АД – используется для лифтов со скоростью ³ 1.5 м/с. Момент двигателя должен регулироваться таким образом, чтобы при пуске и при торможении обеспечивалась заданная диаграмма движения независимо от загрузки. Кроме того при торможении с целью обеспечения заданной точности остановки необходимо обеспечить заданную величину тормозного пути. ТРН обеспечивает регулирование напряжения при работе в двигательном и тормозном режимах (динамическое или противовключение). При динамическом торможении значительно снижаются потери, но при этом необходимо форсировать процесс возбуждения в зоне больших скоростей. ТРН состоит из двух блоков, работа которых должна быть согласована. Для согласования служат реле; РУ - пуск, РТ – торможение (их одновременная работа исключается). Т.к. системы регулирования в моменты пуска и торможения различны, то это требует изменения структуры системы управления (альбом рис 1.32). Для осуществления заданного закона движения при пуске ( РУ+, РТ–) на вход ПУ подается изменяющееся во времени задающее напряжение Uзп (с блока БЗП ). кроме того от датчика загрузки ( ДЗ ) через линейный функциональный преобразователь ( ФЗП ) подается сигнал, пропорциональный загрузке (система инвариантна по отношению к загрузке). ОС по скорости – от BR1. Заданный закон изменения скорости – с помощью блока БС. Для развертки во времени соответствующих сигналов используется задатчик интенсивности. Разность напряжений, соответствующих заданному и действительному значению подается на вход 3 ПУ. Торможение ( РУ –, РТ +) начинается при подходе кабины к датчику положения, который переключает РУ и РТ. Тогда задающий сигнал снимается с выхода БЗ, а коррекция скорости осуществляется в функции тормозного пути. В схеме для этого – интегратор И, на вход которого подается Uтг. Блок БСТ связывает скорость и положение (u(s) ). Коррекция скорости осуществляется в функции положения кабины в шахте. Us прямо пропорциональное пути пройденному о начала торможения, подается на БТО, который выдает сигнал на отключение привода при отработке заданной величины тормозного пути. Интегратор не вносит существенной погрешности в работу ЭП-да, т. к. время интегрирования не велико (£ 1 с ). 3.4 Реализация систем дискретной автоматики, формирования команд управления ЭП лифтов. Для увеличения надежности работы схем автоматического управления широко внедряются элементы бесконтактного управления ( надежность увеличивается в 10 раз ). Рассмотрим пример для простейшего 5-этажного лифта, который выполняет доставку на любой этаж и возвращается на первый (схема см. на карточке). В схеме используются элементы ИЛИ и И-НЕ и бесконтактные (фотоэлектрические датчики для контроля положения кабины в шахте и ограничения скорости. SB1 – вызов, SB2-SB5 – приказы. Популярное:
|
Последнее изменение этой страницы: 2016-05-28; Просмотров: 881; Нарушение авторского права страницы
 ток через ОКП (поляризованное реле) не протекает
ток через ОКП (поляризованное реле) не протекает  φ 2
φ 2  Тахограмма построена в предположении, что к п.п. предъявл. только требования огранич. ускорений, причем для всех режимов работы аmax предполагается одинаковым. Наличие периодов замедления и ускорения снижает среднюю скорость движения механизма за время работы в цикле; длительность п.п. увеличивается с уменьш. ускорения; т.е. требования ограничения ускорения снижает производительность. Поэтому с целью получения max-ной производительности механизма надо стремиться к полному использованию допустимого ускорения (адоп).
Тахограмма построена в предположении, что к п.п. предъявл. только требования огранич. ускорений, причем для всех режимов работы аmax предполагается одинаковым. Наличие периодов замедления и ускорения снижает среднюю скорость движения механизма за время работы в цикле; длительность п.п. увеличивается с уменьш. ускорения; т.е. требования ограничения ускорения снижает производительность. Поэтому с целью получения max-ной производительности механизма надо стремиться к полному использованию допустимого ускорения (адоп). при поэтажном разъезде лифт не успевает разогнаться до установившейся скорости, и имеет большое время дотягивания до этажа на малой скорости, что снижает производительность и приводит к дополнительному нагреву ЭД. Было предложено решение – смещение точки начала замедления в зависимости от величины загрузки кабины. Узел смещения выполнен на основе грузовзвешивающего устройства.
при поэтажном разъезде лифт не успевает разогнаться до установившейся скорости, и имеет большое время дотягивания до этажа на малой скорости, что снижает производительность и приводит к дополнительному нагреву ЭД. Было предложено решение – смещение точки начала замедления в зависимости от величины загрузки кабины. Узел смещения выполнен на основе грузовзвешивающего устройства.
 - время на вспомогательные операции.
- время на вспомогательные операции. время ускорения и замедления на каждом перегоне;
время ускорения и замедления на каждом перегоне;  время теряемое на опрос пассажиров;
время теряемое на опрос пассажиров;  время закрытия и открытия дверей;
время закрытия и открытия дверей;  время выхода пассажиров;
время выхода пассажиров;  время входа пассажиров;
время входа пассажиров;  служебные задержки.
служебные задержки. ), не приводит к увеличению производительности, из-за длительного ожидания кабины и увеличения времени входа и выхода пассажиров.
), не приводит к увеличению производительности, из-за длительного ожидания кабины и увеличения времени входа и выхода пассажиров. ) при различных нагрузках.
) при различных нагрузках. Узел защиты . Командные сигналы разделяют на 2 типа: приказы (из кабины), вызовы (с этажных площадок). Различают схемы раздельного и собирательного управления. При раздельном – или схема воспринимает и обслуживает только 1-ю команду и во время выполнения не реагирует на др. приказы и вызовы. Схема проста в реализации, но ограничивает производительность, следовательно, применяется в лифтах до 9 этажей с небольшим грузопотоком.
Узел защиты . Командные сигналы разделяют на 2 типа: приказы (из кабины), вызовы (с этажных площадок). Различают схемы раздельного и собирательного управления. При раздельном – или схема воспринимает и обслуживает только 1-ю команду и во время выполнения не реагирует на др. приказы и вызовы. Схема проста в реализации, но ограничивает производительность, следовательно, применяется в лифтах до 9 этажей с небольшим грузопотоком.
 Узел торможения. ( альбом стр. 31, 32, 33 ). При подъезде ко 2-му этажу срабатывает датчик селекции 2-го этажа, отключается РИС2, отключается РУВ, отключается контактор большой скорости КБ, подключается КМ – дотягивание, срабатывает ДТО® РИТО® РТО, отключается двигатель, накладывается тормоз.
Узел торможения. ( альбом стр. 31, 32, 33 ). При подъезде ко 2-му этажу срабатывает датчик селекции 2-го этажа, отключается РИС2, отключается РУВ, отключается контактор большой скорости КБ, подключается КМ – дотягивание, срабатывает ДТО® РИТО® РТО, отключается двигатель, накладывается тормоз.