|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Исследование системы стабилизаций частоты вращения двигателя без корректирующей цепиСтр 1 из 2Следующая ⇒
Курсовая работа По дисциплине: Теория автоматического управления На тему: ____________________________________________________ __________________________________________________________________
РУКОВОДИТЕЛЬ: ____________________________ (ученая степень, должность) __________Гоненко Т.В._______ (Ф.И.О.)
СТУДЕНТ: очная Эму-31____________ (форма обучения, гр., шифр) _______Ильин И.В._______ (Ф.И.О.)
________________________ (Рег. №) ________________________ (дата) ________________________ (подпись лаборанта)
Омск 2012 г.
Введение
Развитие теории управления началось в период промышленной революции. Сначала это направление в науке разрабатывалось механиками для решения задач регулирования, то есть поддержания заданного значения частоты вращения, температуры, давления в технических устройствах (например, в паровых машинах). Отсюда происходит название «теория автоматического регулирования». Основной целью автоматизации является исключение непосредственного участия человека в управлении производственными процессами и другими техническими объектами. В настоящее время автоматизация технологических процессов представляет собой одно из важнейших средств роста эффективности производства, интенсификации развития народного хозяйства. Таким образом, задача изучения дисциплины " Теория автоматического управления" состоит в освоении основных принципов, построения и функционирования автоматических систем управления на базе современных математических методов и технических средств. Для изучения теории автоматического управления должен применяться системный подход, требующий рассмотрения системы в ее целостности, а не просто учета факторов, влияющих на состояние отдельных элементов. В любой управляемой системе есть два объекта – управляемый и управляющий. Например, при управлении частотой вращения объект управления – это двигатель (электромотор, турбина); в задаче поддержания уровня громкости – динамик. Самый знаменитый из первых механических регуляторов – центробежный регулятор Уатта, для стабилизации частоты вращения паровой турбины. Регулятор действует на объект управления не прямо, а через исполнительные механизмы (приводы), которые могут усиливать и преобразовывать сигнал управления, например, электрический сигнал может «превращаться» в перемещение клапана, регулирующего расход топлива, или в поворот руля на некоторый угол. Для контроля управления необходимы датчики, снимающие характеристики объекта, которыми необходимо управлять. Качество управления можно улучшить, если получать дополнительную информацию – измерять внутренние свойства объекта.
3 QFzTBCu2nIowwYpnnPg4wANRHrjhCo0rxDkQuWVF4wp938oJuSKkPVz7beMK6mKwyWggeILKcMVx uUK54IYrdK6AefsRVyi5CDbvHpsrgoA2W+JCF3YlbexTIqDnQ6bYqETlksNwheGK554kPWBdoXzw c+EKPAkNR8pRDm6Ov4sz63oarvVD+hf/AAAA//8DAFBLAwQUAAYACAAAACEAFUqrhuIAAAAMAQAA DwAAAGRycy9kb3ducmV2LnhtbEyPwWrDMBBE74X+g9hCb40sNzaNYzmE0PYUCk0KJTfF2tgmlmQs xXb+vptTc5thhtm3+WoyLRuw942zEsQsAoa2dLqxlYSf/cfLGzAflNWqdRYlXNHDqnh8yFWm3Wi/ cdiFitGI9ZmSUIfQZZz7skaj/Mx1aCk7ud6oQLavuO7VSOOm5XEUpdyoxtKFWnW4qbE87y5Gwueo xvWreB+259PmetgnX79bgVI+P03rJbCAU/gvww2f0KEgpqO7WO1ZS17EhB4kzJMU2K0gksUc2JFU skhj4EXO758o/gAAAP//AwBQSwECLQAUAAYACAAAACEAtoM4kv4AAADhAQAAEwAAAAAAAAAAAAAA AAAAAAAAW0NvbnRlbnRfVHlwZXNdLnhtbFBLAQItABQABgAIAAAAIQA4/SH/1gAAAJQBAAALAAAA AAAAAAAAAAAAAC8BAABfcmVscy8ucmVsc1BLAQItABQABgAIAAAAIQCaJEHROwYAAOw/AAAOAAAA AAAAAAAAAAAAAC4CAABkcnMvZTJvRG9jLnhtbFBLAQItABQABgAIAAAAIQAVSquG4gAAAAwBAAAP AAAAAAAAAAAAAAAAAJUIAABkcnMvZG93bnJldi54bWxQSwUGAAAAAAQABADzAAAApAkAAAAA ">
Рисунок 1 – Схема системы стабилизаций
Угловая скорость ω ДПТ (без автоматического регулятора) изменяется с изменением нагрузки. При увеличении нагрузки ω уменьшается, а при уменьшении нагрузки ω увеличивается. Количественно эти изменения оцениваются так называемым возмущающим воздействием
где
Если по условиям технологии изменение угловой скорости недопустимо, то нужно использовать замкнутую систему управления – систему стабилизации. Стабилизация частоты вращения достигается за счёт того, что при изменении нагрузки автоматически изменяется напряжение Заданная система является статической, то есть она имеет статическую ошибку. Это означает, что поставленная задача обеспечения постоянства угловой скорости при различных нагрузках, решается не полностью. В статических САУ при изменении нагрузки угловая скорость тоже изменяется и в установившихся режимах принимает различные значения, зависящие от возмущающего воздействия. Но при наличии автоматического регулятора угловая скорость будет изменяться в значительно меньших пределах, чем без регулятора. При изменении нагрузки на валу двигателя изменяются его обороты. То есть реальная угловая частота двигателя отличается от заданного значения задатчика. Тахогенератор измеряет реальную угловую частоту двигателя и подаёт электрический сигнал на элемент сравнения.
Элементом сравнения является электронный усилитель ЭУ, имеющий два входа. Операционный усилитель ОУ вычисляет сигнал ошибки Генератор приводится в движение трёхфазным электродвигателем, который с постоянной частотой вращает ротор генератора. Генератор выполняет функцию усилителя мощности. С его роторной обмотки сигнал Благодаря контуру отрицательной обратной связи формируется сигнал рассогласования (ошибки регулирования), который после трёхкратного усиления изменяет обороты двигателя, компенсируя тем самым отрицательное влияние нагрузки. Ошибка рассогласования стремится к нулю.
Курсовая работа По дисциплине: Теория автоматического управления На тему: ____________________________________________________ __________________________________________________________________
РУКОВОДИТЕЛЬ: ____________________________ (ученая степень, должность) __________Гоненко Т.В._______ (Ф.И.О.)
СТУДЕНТ: очная Эму-31____________ (форма обучения, гр., шифр) _______Ильин И.В._______ (Ф.И.О.)
________________________ (Рег. №) ________________________ (дата) ________________________ (подпись лаборанта)
Омск 2012 г.
Введение
Развитие теории управления началось в период промышленной революции. Сначала это направление в науке разрабатывалось механиками для решения задач регулирования, то есть поддержания заданного значения частоты вращения, температуры, давления в технических устройствах (например, в паровых машинах). Отсюда происходит название «теория автоматического регулирования». Основной целью автоматизации является исключение непосредственного участия человека в управлении производственными процессами и другими техническими объектами. В настоящее время автоматизация технологических процессов представляет собой одно из важнейших средств роста эффективности производства, интенсификации развития народного хозяйства. Таким образом, задача изучения дисциплины " Теория автоматического управления" состоит в освоении основных принципов, построения и функционирования автоматических систем управления на базе современных математических методов и технических средств. Для изучения теории автоматического управления должен применяться системный подход, требующий рассмотрения системы в ее целостности, а не просто учета факторов, влияющих на состояние отдельных элементов. В любой управляемой системе есть два объекта – управляемый и управляющий. Например, при управлении частотой вращения объект управления – это двигатель (электромотор, турбина); в задаче поддержания уровня громкости – динамик. Самый знаменитый из первых механических регуляторов – центробежный регулятор Уатта, для стабилизации частоты вращения паровой турбины. Регулятор действует на объект управления не прямо, а через исполнительные механизмы (приводы), которые могут усиливать и преобразовывать сигнал управления, например, электрический сигнал может «превращаться» в перемещение клапана, регулирующего расход топлива, или в поворот руля на некоторый угол. Для контроля управления необходимы датчики, снимающие характеристики объекта, которыми необходимо управлять. Качество управления можно улучшить, если получать дополнительную информацию – измерять внутренние свойства объекта.
3 QFzTBCu2nIowwYpnnPg4wANRHrjhCo0rxDkQuWVF4wp938oJuSKkPVz7beMK6mKwyWggeILKcMVx uUK54IYrdK6AefsRVyi5CDbvHpsrgoA2W+JCF3YlbexTIqDnQ6bYqETlksNwheGK554kPWBdoXzw c+EKPAkNR8pRDm6Ov4sz63oarvVD+hf/AAAA//8DAFBLAwQUAAYACAAAACEAFUqrhuIAAAAMAQAA DwAAAGRycy9kb3ducmV2LnhtbEyPwWrDMBBE74X+g9hCb40sNzaNYzmE0PYUCk0KJTfF2tgmlmQs xXb+vptTc5thhtm3+WoyLRuw942zEsQsAoa2dLqxlYSf/cfLGzAflNWqdRYlXNHDqnh8yFWm3Wi/ cdiFitGI9ZmSUIfQZZz7skaj/Mx1aCk7ud6oQLavuO7VSOOm5XEUpdyoxtKFWnW4qbE87y5Gwueo xvWreB+259PmetgnX79bgVI+P03rJbCAU/gvww2f0KEgpqO7WO1ZS17EhB4kzJMU2K0gksUc2JFU skhj4EXO758o/gAAAP//AwBQSwECLQAUAAYACAAAACEAtoM4kv4AAADhAQAAEwAAAAAAAAAAAAAA AAAAAAAAW0NvbnRlbnRfVHlwZXNdLnhtbFBLAQItABQABgAIAAAAIQA4/SH/1gAAAJQBAAALAAAA AAAAAAAAAAAAAC8BAABfcmVscy8ucmVsc1BLAQItABQABgAIAAAAIQCaJEHROwYAAOw/AAAOAAAA AAAAAAAAAAAAAC4CAABkcnMvZTJvRG9jLnhtbFBLAQItABQABgAIAAAAIQAVSquG4gAAAAwBAAAP AAAAAAAAAAAAAAAAAJUIAABkcnMvZG93bnJldi54bWxQSwUGAAAAAAQABADzAAAApAkAAAAA ">
Рисунок 1 – Схема системы стабилизаций
Угловая скорость ω ДПТ (без автоматического регулятора) изменяется с изменением нагрузки. При увеличении нагрузки ω уменьшается, а при уменьшении нагрузки ω увеличивается. Количественно эти изменения оцениваются так называемым возмущающим воздействием
где
Если по условиям технологии изменение угловой скорости недопустимо, то нужно использовать замкнутую систему управления – систему стабилизации. Стабилизация частоты вращения достигается за счёт того, что при изменении нагрузки автоматически изменяется напряжение Заданная система является статической, то есть она имеет статическую ошибку. Это означает, что поставленная задача обеспечения постоянства угловой скорости при различных нагрузках, решается не полностью. В статических САУ при изменении нагрузки угловая скорость тоже изменяется и в установившихся режимах принимает различные значения, зависящие от возмущающего воздействия. Но при наличии автоматического регулятора угловая скорость будет изменяться в значительно меньших пределах, чем без регулятора. При изменении нагрузки на валу двигателя изменяются его обороты. То есть реальная угловая частота двигателя отличается от заданного значения задатчика. Тахогенератор измеряет реальную угловую частоту двигателя и подаёт электрический сигнал на элемент сравнения.
Элементом сравнения является электронный усилитель ЭУ, имеющий два входа. Операционный усилитель ОУ вычисляет сигнал ошибки Генератор приводится в движение трёхфазным электродвигателем, который с постоянной частотой вращает ротор генератора. Генератор выполняет функцию усилителя мощности. С его роторной обмотки сигнал Благодаря контуру отрицательной обратной связи формируется сигнал рассогласования (ошибки регулирования), который после трёхкратного усиления изменяет обороты двигателя, компенсируя тем самым отрицательное влияние нагрузки. Ошибка рассогласования стремится к нулю.
Исследование системы стабилизаций частоты вращения двигателя без корректирующей цепи
Составляем функциональную схему системы управления (рисунок 2)
Рисунок 2 – функциональная схема системы управления
Составляем структурную схему замкнутой системы.
Рисунок 3 – Структурная схема замкнутой системы
Составляем структурную схему разомкнутой системы.
Рисунок 4 – Структурная схема разомкнутой системы
Т.к. величина R2 не задана, то передаточную функцию Статическая ошибка
- коэффициент разомкнутой системы
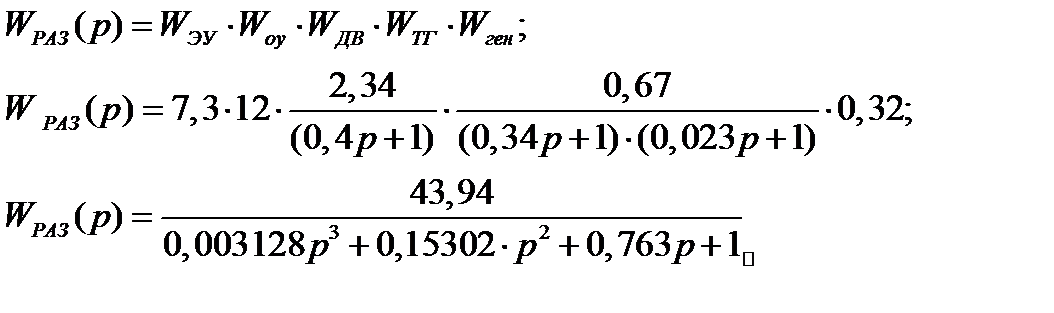
Составляем передаточную функцию разомкнутой системы. Передаточная функция разомкнутой системы представляет собой произведение передаточных функций звеньев прямой ветви на передаточную функцию контура обратной связи.
Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 775; Нарушение авторского права страницы

 , которое пропорционально моменту сопротивления
, которое пропорционально моменту сопротивления  , прикладываемому к валу двигателя.
, прикладываемому к валу двигателя. ,
,  ,
,  - передаточный коэффициент ДПТ по возмущающему воздействию.
- передаточный коэффициент ДПТ по возмущающему воздействию. , подаваемое на якорь двигателя. При увеличении нагрузки напряжение
, подаваемое на якорь двигателя. При увеличении нагрузки напряжение  увеличивается, а при уменьшении – уменьшается.
увеличивается, а при уменьшении – уменьшается. . Сигнал ошибки регулирования поступает на ЭУ, на котором усиливается по мощности. Усиленный сигнал поступает на обмотку возбуждения генератора ОВГ (статорная обмотка).
. Сигнал ошибки регулирования поступает на ЭУ, на котором усиливается по мощности. Усиленный сигнал поступает на обмотку возбуждения генератора ОВГ (статорная обмотка). подаётся на роторную обмотку двигателя. Статорная обмотка двигателя запитывается от отдельного источника питания.
подаётся на роторную обмотку двигателя. Статорная обмотка двигателя запитывается от отдельного источника питания.



 находят через заданную статическую ошибку.
находят через заданную статическую ошибку. меньше возможного воздействия в (1+Крс ) раз
меньше возможного воздействия в (1+Крс ) раз

 -постоянный момент на валу двигателя.
-постоянный момент на валу двигателя.

 - коэффициент передачи разомкнутой системы без учета операционного усилителя.
- коэффициент передачи разомкнутой системы без учета операционного усилителя.