|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Модуль 1. Математические модели многомерных САУСтр 1 из 5Следующая ⇒
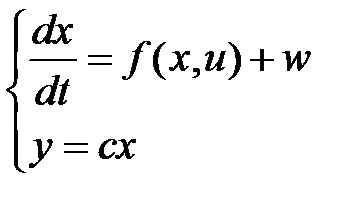
Лекции «Современная прикладная теория управления» Модуль 1. Математические модели многомерных САУ Тема 1.1. Математические модели САУ при наличии неопределенностей Проблемы управления сложными системами. Система представляется уравнением вида
Сложными называются системы, у которых имеются: 1. Большое число элементов подсистем, связанных между собой (N). 2. Может быть и так: 3. Влияние внешней среды, которая заранее может быть не известна.
4. Нелинейность, нестационарность, неопределенность. В природе чисто нестационарных (зависящих от t) систем нет. Они получаются в результате математических преобразований и упрощений:
Подходы для решения сложных динамических задач. Обычно проводят декомпозицию задачи, которая проводится по следующим направлениям исследования: 1. Функциональная декомпозиция – разбиение общей проблемы на несколько частных задач различного уровня с помощью декомпозиции задач и математических моделей, преобразованием этих задач с последующим упрощением. 2. Структурная декомпозиция – выделение более простых подсистем, с помощью расщепления системы на подсистемы, в том числе за счет вспомогательных управлений, которые можно рассматривать отдельно, кроме систем согласованного управления, где должно выполняться условие согласованного движения. Например, для системы
условием согласованного движения является последнее уравнение. 3. Временная декомпозиция – выделение отдельных режимов работы системы, например, в задачах динамики полета.
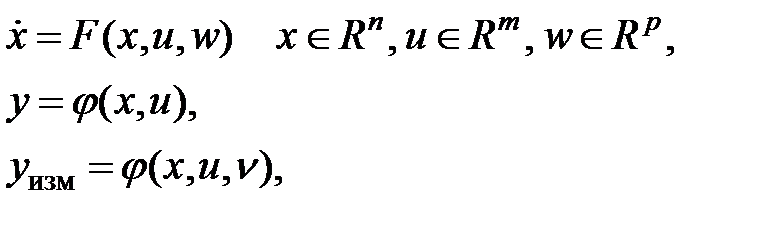
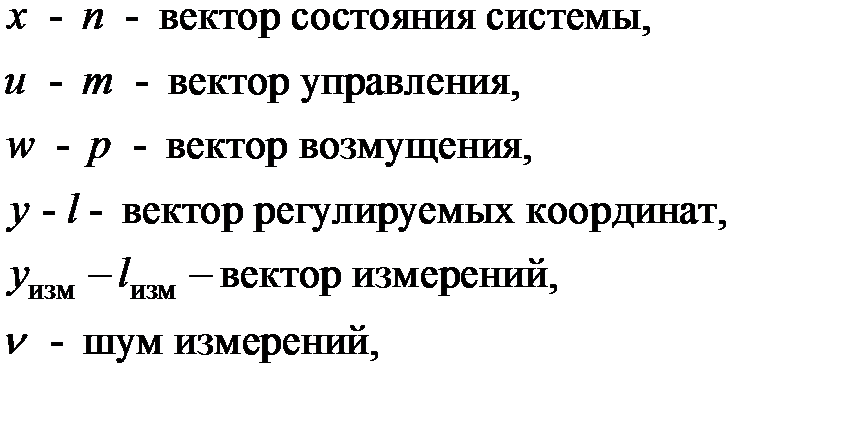
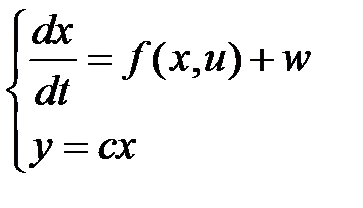
Математические модели динамических систем Для технических, производственных подвижных объектов, летательных аппаратов часто используют (или могут быть использованы) модели в виде нелинейных дифференциальных уравнений:
где
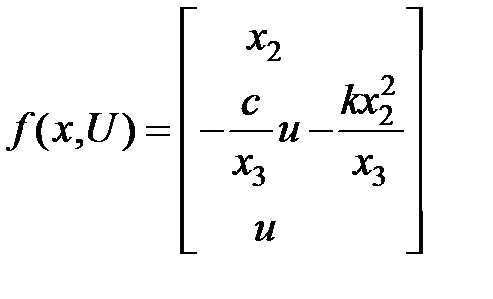
Здесь правая часть уравнения Пример 1.
Для простоты пока будем рассматривать случай y=yизм, Рассмотрим пример построения нелинейной системы: h – высота,
Согласно второму закону Ньютона
Введем обозначение:
Преобразуем к следующему виду:
Линеаризованные модели для нелинейных систем управления Часто удается использовать упрощенные уравнения исходной системы в виде отклонений от некоторого движения. Обоснованием этого является возможность управления системой так, чтобы система двигалась в окрестности данного движения.
Часто на практике система работает в некоторой окрестности от заданного режима, который называют номинальным или невозмущенным. Частным случаем невозмущенного движения является положение равновесия. В этом случае уравнение (1) можно записать в отклонениях от номинального движения:
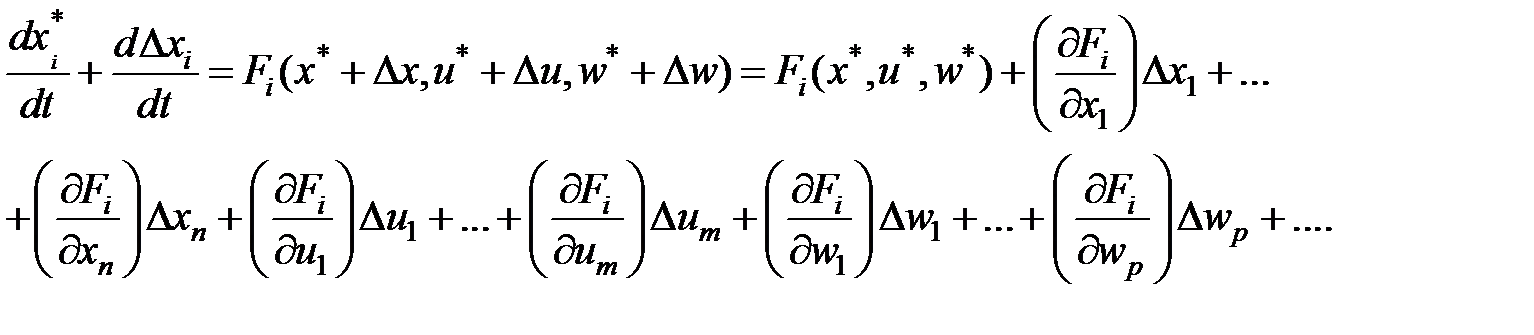
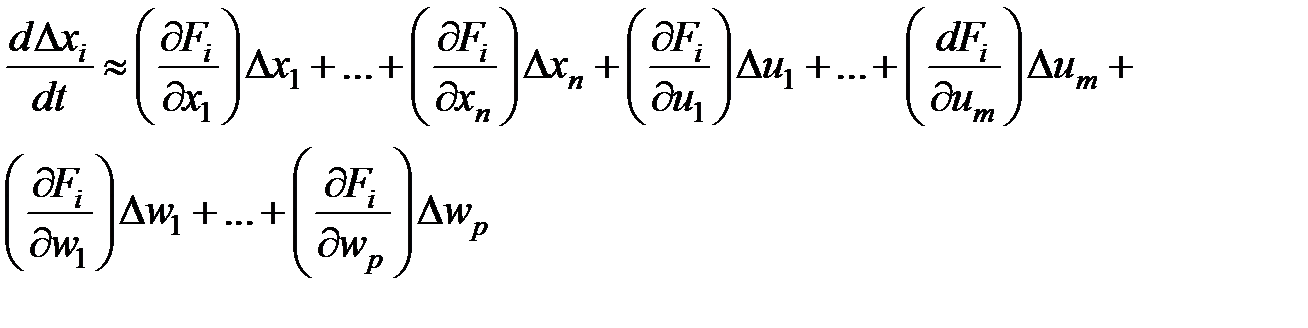
где Будем полагать, что Разложим правую часть уравнения (1) в ряд Тейлора относительно номинального режима
Уравнение (1) запишем в виде системы дифференциальных уравнений:
Тогда:
Учитывая, что
и отбрасывая слагаемые малого порядка (произведения отклонений), получим
Запишем систему полученных уравнений в матричном виде:
где равная Знак * показывает, что нужно подставить значение номинального движения: Аналогично находим матрицу для координат управления и координат векторавозмущения:
Аналогично и для производных координат вектора Выражение для
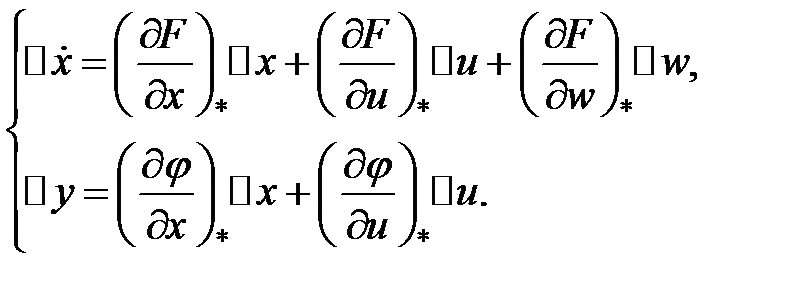
Таким образом, получим уравнения в отклонениях от номинального режима:
С учетом обозначений
получим систему
Поскольку Пример 1.
Учитывая, что
Пример 1. Пусть задана исходная система
1) По схеме Горнера получим модель в пространстве состояний:
2) С помощью пакета MatLab получим:
или
Можно переписать в виде
Таким образом, получили различные системы, которые имеют одну передаточную функцию, но имеют разные свойства: 1)
2)
В действительности правильной является модель 1). Модели внешних воздействий Рассмотрим управляемую систему:
где Внешние воздействия можно разделить на регулярные и нерегулярные и случайные. Регулярные воздействия – это такие воздействия, которые можно представить с помощью решения дифференциальных уравнений при заранее неизвестных начальных условиях. Нерегулярные внешние воздействия – имеют ограниченную скорость изменения и их можно записать с помощью неравенств, удовлетворяющих некоторым ограничениям. Случайные воздействия – могут иметь разрывы и их нельзя представить в виде модели в времени. Рассмотрим регулярные и нерегулярные воздействия. При этом произвольное воздействие будем представлять в виде суммы регулярного и нерегулярного воздействия: Случай стационарной системы
Надо найти:
Рассмотрим случай, когда корни характеристических уравнений:
Тогда
где
Тогда получается формула
Тогда
Такое будет в случае:
Достаточное условие сходимости:
Подставим в исходное уравнение
получим
Пример 1. Определить установившееся движение с помощью уравнения Сильвестра.
Пример.
или можно переписать
Для положительной определенности условие Стодола является необходимым и достаточным условием позитивной системы. Помножим справа и слева соответственно на
Получим
а)
б) а) и б) являются геометрическими ограничениями для ограниченных хаотических w(t).
Если Q > 0, то из (2) следует (1). Если Q ≥ 0, то из (2) не обязательно следует (1). Поэтому (2) является общей формулой.
Интегральные ограничения:
т.е. функция
Геометрическое ограничение
Ограничения бывают и для фазовых координат:
Пример.
Пример 1.
Данному уравнению (1) соответствует n частных решений.
Матрица Х(t) должна быть такой, что Пример 2.
Тогда решение уравнения (1) можно записать в виде
При Тогда Действительно, умножим на матрицу
обозначим
Обозначим Тогда
Пример.
Б) Схема Ракитского Рассмотрим разностное уравнение
где Если Покажем, что уравнение (1) дает точное решение для уравнения:
Решение уравнения (2) имеет вид:
При
Из уравнения (3) получим:
Необходимо выбрать Рассмотрим однородное уравнение
Найдем производную
Считаем
Сравним формулу (4) с формулой (1)
Отсюда следует, что матрицу Таким образом, получили разностное уравнение.
Рассмотрим случай линейных стационарных систем.
Схема Ракитского (Системный метод 1-го порядка).
Алгоритм вычисления матриц дискретной модели (
Покажем, что справедливо равенство:
где
САУ с пассивной адаптацией САУ с пассивной адаптацией могут быть использованы в качестве основного контура адаптации.
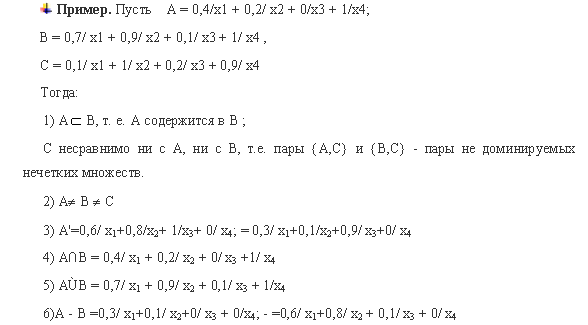
Включeнue.
Равенство.
Разность.
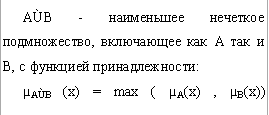
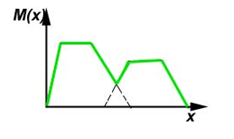
Объединение.
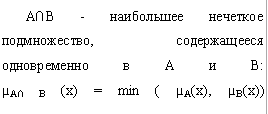
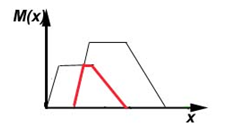
Пересечение.
Дополнение.
Концентрация.
Размывание (или размытие).
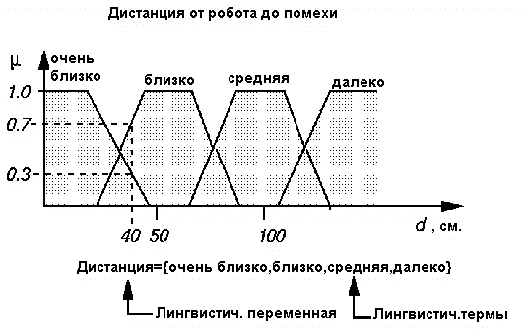
Определение числа термов Необходимо исходить из стоящей перед вами задачи и необходимой точности описания, надо помнить, что для большинства приложений вполне достаточно трех термов в переменной; Нечеткие правила функционирования системы должны быть понятны - определяете необходимое число термов и каждому из них ставите в соответствие некоторое значение описываемой физической величины. Для этого значения степень принадлежности физической величины к терму будет равна единице, а для всех остальных значений - в зависимости от выбранной функции принадлежности Пример 1. 1. Лингвистическая переменная ВОЗРАСТ для нее термы ЮНОШЕСКИЙ, СРЕДНИЙ и ПРЕКЛОННЫЙ. 2. Лингвистической переменной ДИСТАНЦИЯ являются термы ДАЛЕКО, БЛИЗКО Нечеткие системы основаны на правилах продукционного типа, в качестве посылки и заключения в правиле используются лингвистические переменные. Правило продукций состоит из посылок и заключения. Возможно наличие нескольких посылок в правиле, они объединяются посредством логических связок И, ИЛИ. Продукционное правило записывается в виде: «ЕСЛИ (посылка) (связка) (посылка)… (посылка) ТО (заключение)». Пример 2. Можно задать степень принадлежности к терму ОЧЕНЬ БЛИЗКО равную 0.7, а к терму БЛИЗКО– 0.3
Лекции «Современная прикладная теория управления» Модуль 1. Математические модели многомерных САУ Популярное:
|
Последнее изменение этой страницы: 2016-07-12; Просмотров: 765; Нарушение авторского права страницы
 ,
,  ,
,  .
. - векторный критерий качества. Много требований по качеству.
- векторный критерий качества. Много требований по качеству.
 ,
,  - известно,
- известно,  - неизвестно.
- неизвестно. ,
,  – отклонение от заданного режима
– отклонение от заданного режима  - вектора функции времени,
- вектора функции времени,  .
.
 (1)
(1)
 - вектор функция удовлетворяет условиям существования и единственности решения при
- вектор функция удовлетворяет условиям существования и единственности решения при  .
. .
. .
. ,
, 



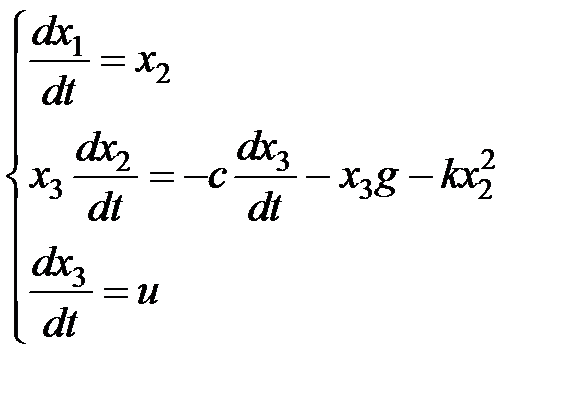 - вводим управление массой ракеты.
- вводим управление массой ракеты.
 ,
,  .
. (1)
(1) (2)
(2) ,
,  - число управлений больше числа выходов.
- число управлений больше числа выходов. ,
,  ,
,  ,
,  ,
,  ,
,  – отклонения от номинального движения.
– отклонения от номинального движения.
 который удовлетворяет уравнению:
который удовлетворяет уравнению: 
 .
.
 ,
, 
 ,
,  ,
,  - матрица Якоби,
- матрица Якоби, 
 .
. ,
,  .
. .
. записывается аналогично выражению
записывается аналогично выражению  :
: 
 ,
,  ,
,  , получим:
, получим:  ,
,  .
.




 .
. ,
,  - неуправляема
- неуправляема ,
,  - наблюдаема
- наблюдаема ,
,  - управляема
- управляема ,
,  - ненаблюдаема
- ненаблюдаема
 – возмущение,
– возмущение,  – помеха измерений.
– помеха измерений. .
.
 при
при  ,
, 




 - различные
- различные
 - различные
- различные ,
,  ,
, 




 - собственная матрица.
- собственная матрица.


 при
при 




 ,
, 


 - уравнение Сильвестра (похоже на уравнение Ляпунова если
- уравнение Сильвестра (похоже на уравнение Ляпунова если  ,
,  и
и  ).
). - уравнение в MatLab
- уравнение в MatLab










 ,
,  ,
, 


 и
и 

 (1)
(1)
 (2)
(2)

 ,
,  должна затухать. Если вместо
должна затухать. Если вместо  взять u:
взять u:  - ограниченное управление, где
- ограниченное управление, где  - весовая функция и может быть
- весовая функция и может быть  .
. , т.е.
, т.е. 



 - ограничение,
- ограничение,  при
при 




 ,
, 

 для всех
для всех  .
. ,
,  ,
,  ,
,  ,
,  .
. , где
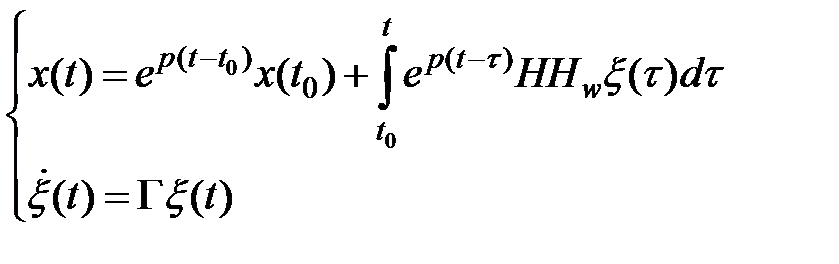
, где  -n-постоянный вектор, которое подставим в уравнение (1), из которого получим для любого вектора с уравнение:
-n-постоянный вектор, которое подставим в уравнение (1), из которого получим для любого вектора с уравнение:  ,
,  или
или 
 ,
, 
 , где
, где  фундаментальная матрица, которая определяется с точностью до постоянной матрицы или может быть взята в виде
фундаментальная матрица, которая определяется с точностью до постоянной матрицы или может быть взята в виде  где
где  -
-  матрица
матрица  .
. ,
,  , тогда получим
, тогда получим  . При этом решение
. При этом решение .
. - матрица Коши или переходная матрица.
- матрица Коши или переходная матрица.







 (1)
(1)


 .
. , то получим схему Эйлера.
, то получим схему Эйлера. (2)
(2)
 (3)
(3)
 получим
получим





 некоторой функцией времени
некоторой функцией времени матрица
матрица



 (4)
(4)

 нужно принять в виде матрицы Якоби. Матрица Якоби берется любой на интервале
нужно принять в виде матрицы Якоби. Матрица Якоби берется любой на интервале  .
.











 )
)
 – выделение целой части
– выделение целой части












 ,
,  вычисляется по формуле:
вычисляется по формуле: