|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Условие прочности и жёсткости при изгибе. ⇐ ПредыдущаяСтр 4 из 4
Одним из наиболее распространённых видов деформации в машиностроительной практике является совместное воздействие изгиба и кручения. В таких условиях например работают валы редукторов.
На участке АВ вал будет работать на изгиб с кручением. Очевидно, что наиболее опасным будет сечение В.
Наибольшие нормальные напряжения, возникающие в этом сечении
В наиболее опасной точке будет возникать плоское напряженное состояние
Найдем главные напряжения
Подставляя найденные главные напряжения в выражения для 1) Теория наибольших касательных напряжений 2) Теория энергии формоизменения 3) Теория Мора Эти формулы можно использовать не только для изгиба, но и для растяжения (сжатия), изгиба и кручения. В случае изгиба с кручением круглых валов, учитывая, что получим
Экзаменационные вопросы по дисциплине «Теория механизмов и машин». 1. Основные понятия и определения ТММ. Машина: определение, назначение, классификация. Механизм: определение, назначение, классификация. ТММ – наука, изучающая структуру, строение, кинематику и динамику механизмов и машин. Машина – устройство для преобразования энергии или движения, а также для накопления и переработки информации. Машина увеличивает производительность труда и облегчает труд человека. По назначению машины условно делятся на три группы: 1. Энергетические – какую либо энергию преобразуют в механическую работу и наоборот (ДВС, электродвигатели, генераторы, турбины и т.д.) 2. Технологические или рабочие – непосредственно выполняют производственные процессы (станки, транспортные машины, горнодобывающие машины, сельскохозяйственные машины и т.д.) 3. Информационные машины – контролируют, регулируют и управляют производственными процессами (компьютеры). Механизм – устройство, предназначенное для преобразования движения одного тела в требуемое движение другого тела. Классы механизмов: 1. Механизмы двигателей и преобразователей. 2. Передаточные механизмы. 3. Механизмы управления. 4. Исполнительные механизмы. 5. Механизмы подачи, транспортировки, питания и сортировки. 6. Механизмы автоматического счёта, взвешивания и упаковки готовой продукции. Анализ механизма – это исследование механизма. Синтез механизма – это проектирование механизма. Звенья, основные виды звеньев. Механизм представляет собой систему тел, движущихся как единое целое. Каждое твердое тело, входящее в состав механизма, называется звеном. Виды звеньев:
кривошип – вращающееся звено рычажного механизма, которое может совершать полный оборот вокруг неподвижной оси; коромысло – вращающееся звено рычажного механизма, которое может совершать только неполный оборот вокруг неподвижной оси; шатун – звено рычажного механизма, образующее кинематические пары только с подвижными звеньями; кулиса – звено рычажного механизма, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару; в зависимости от степени протяженности элемента поступательной пары различают «камень» (звено меньшей протяженности) и «направляющую»; ползун – звено рычажного механизма, образующее поступательную пару со стойкой;
кулачок – звено, имеющее элемент высшей пары, выполненный в виде поверхности переменной кривизны; зубчатое колесо – звено с замкнутой системой зубьев, обеспечивающее непрерывное движение другого зубчатого колеса или рейки. Звенья соединяются между собой при помощи кинематических пар.
Кинематические пары. Классификация кинематических пар. Примеры кинематических пар в зависимости от классов. Кинематическая пара – соединение двух соприкасающихся звеньев, допускающее их относительное движение. Элемент кинематическая пары – совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару Кинематические пары различают и классифицируют по различным признакам. 1) По числу связей, налагаемых на относительное движение звеньев. Всякое свободно движущееся в пространстве абсолютно твердое тело обладает шестью степенями свободы или шестью видами независимых возможных движений. Вхождение двух звеньев в кинематическую пару налагает на их относительное движение некоторые ограничения или условия связи; класс кинематической пары (номер класса совпадает с числом условий связи S) всегда находится в пределах от 1 до 5, число оставшихся подвижностей H дополняет число связей до шести, т.е. На рис. 3 представлены примеры кинематических пар 1 – 5 классов. 2) По характеру контакта звеньев различают пары низшие (требуемое относительное движение звеньев можно получить постоянным соприкасанием их элементов по поверхности) и высшие (требуемое относительное движение можно получить только соприкасанием их элементов по линиям и в точках). Например, трехподвижная пара по 3) По области относительного движения звеньев пары могут быть плоскими (траектории всех точек в относительном движении звеньев – плоские кривые, расположенные в параллельных плоскостях) и пространственными. Плоская одноподвижная пара может быть либо вращательной (шарниром – рис. 3, д), либо поступательной (рис. 3, е); пространственная пара может быть, например, винтовой (одноподвижная), цилиндрической (двухподвижная), сферической (двух- и трехподвижная) и т.д. Механизм, звенья которого образуют только вращательные, поступательные, цилиндрические и сферические пары, называют рычажным.
Кинематические цепи. Систему звеньев, связанных между собой кинематическими парами, называют кинематической цепью. Классификация кинематических цепей 1) По области движения звеньев цепи бывают плоские (траектории движения точек всех звеньев –– плоские кривые, лежащие в параллельных плоскостях) и пространственные. 2) По признаку наличия разветвлений различают цепи простые (каждое звено цепи входит не более, чем в две кинематических пары) и сложные или разветвленные (некоторые звенья входят в три, или более пары); в разветвленных цепях могут присутствовать так называемые кратные (двойные, тройные и т.д.) шарниры. 3) По признаку наличия в кинематических цепях замкнутых контуров цепи могут быть замкнутыми и незамкнутыми; в замкнутой цепи каждое звено входит не менее, чем в две кинематические пары. Некоторые дополнительные определения: обобщенная координата механизма – каждая из независимых координат, определяющих положение всех звеньев механизма относительно стойки; число степеней свободы (степень подвижности) механизма – число независимых вариаций обобщенных координат механизма; начальное звено – звено, которому приписывается одна или несколько обобщенных координат механизма; входное звено – звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев; выходное звено – звено, совершающее движение, для выполнения которого предназначен механизм. Популярное:
|
Последнее изменение этой страницы: 2016-07-13; Просмотров: 1139; Нарушение авторского права страницы
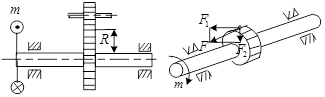 Приводя силы, действующие на вал к оси вала, имеем следующую расчетную схему.
Приводя силы, действующие на вал к оси вала, имеем следующую расчетную схему.


 Наибольшие касательные напряжения
Наибольшие касательные напряжения 

 В качестве примера мы рассматривали круглое напряженное состояние, но такой же характер напряженного состояния будет при любом поперечном сечении и последующие результаты применимы для произвольных сечений.
В качестве примера мы рассматривали круглое напряженное состояние, но такой же характер напряженного состояния будет при любом поперечном сечении и последующие результаты применимы для произвольных сечений. ;
; 
 по различным теориям
по различным теориям




 стойка – звено, принимаемое за неподвижное; такое звено в механизме может быть только одно;
стойка – звено, принимаемое за неподвижное; такое звено в механизме может быть только одно; 
 , поэтому пару пятого класса называют одноподвижной, четвертого – двухподвижной и т.д.
, поэтому пару пятого класса называют одноподвижной, четвертого – двухподвижной и т.д.