
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Умножение матриц. Согласованные матрицы.Стр 1 из 7Следующая ⇒
Матрицы И действия над матрицами. Матрица - прямоуг таблица чисел, содерж m-строк и n-столбцов. 1. Матрицы равны между собой, если равны соответств элементы этих матриц. 2. Матрица, в которой m=n наз квадратной или n-ого порядка. 3. Квадратная матрица, у которой все элементы, кроме элементов гл диагонали, равны 0 называется диагональной. 4. Диаг матрица, у которой каждый элемент главной диаг =1 наз единичной. 5. Квадратная матрица наз. треугольной, если все элементы, расположенные по одну сторону её гл диаг =0. 6. Матрица, у которой все числа, стоящие на гл диаг не нулевые, а также некоторое кол ненулевых строк, наз трапециевидной. 7. Матрица, содерж один столбец или строку, наз вектором из Rn пространства. Действия: · Сложение – только для матриц одинакового размера. · Умножение на число. Множества матриц одинакового размера обознач Mm*n. Тогда введённое на этом мн-ве операции сложения и умнож на число превращ Mm*n в линейное пр-во, векторами которого явл матрицы m*n. · Умножение на вектор-столбец. Для умножения матрицы на вектор-столбец надо, чтобы число столбцов матрицы было равно числу координат вектора. · Две матрицы наз эквивалентными, если одна из них получена из другой с помощью элементарным преобраз. любую матрицу можно привести к канонической.
Умножение матриц. Согласованные матрицы. Операция умножения двух матриц вводится только для случая, когда число столбцов первой матрицы равно числу строк второй матрицы. Произведением матрицы Аm*n = (ai, g) на матрицу Вn*p = (bi, k) называется матрица Сm*p = (сi, k) такая, что:
где i= Матрицы А, n*m и В, m*n, назыв. согласованными. (если А согласованно с В, то это не значит, что В согласованно с А). Смысл согласованности в том, чтобы количество столбцов 1-ой матрицы совпадало с количеством строк 2-ой матрицы. Для согласованных матриц можно определить операцию умножения. Если матрицы A и B квадратные и одного размера, то A*B и B*A всегда существуют. Транспонированием называется смена всех элементов столбца соотв элементами строки. Если AT=A, то матрица А наз. симметричная (она обязательно квадратная). --- Обратная матрица. Процедура ее нахождения. Пусть есть матрица А – невырожденная. А-1, A-1*A=A*A-1=E, где E –единичная матрица. A-1 имеет те же размеры, что и A. Алгоритм нахождения обратной матрицы: 1. вместо каждого элемента матрицы аij записываем его алгебраическое дополнение. аij А* - союзная матрица. 2. транспонируем полученную союзную матрицу. А*Т 3. делим каждый элемент союзной матрицы на определитель матрицы А.
Теорема: (об аннулировании определителя):
Невырожденные системы СЛАУ. Способы решения. СЛАУ принято записывать в матричной форме, когда сами неизвестные не указываются, а указывается только матрица системы А и столбец свободных членов В. Решение невырожденных СЛАУ методом Крамера: Х=А-1*В А-1= X1= Теорема: (Крамера):
Однородные СЛАУ. Фундаментальная система решений. АХ=В – система и параллельно рассмотрим систему АХ=0. (АХ=В – Неоднородн. СЛАУ, АХ=0 – однородн. СДАУ). Одновременно выполняется: 1. АХ=0 имеет тольок тривиальное решение, АХ=В имеет единственное решение или не имеет решений совсем. 2. АХ=0 имеет нетривиальное решение, АХ=В имеет бесконечное число решений. Рассмотрим подробнее 2-ой случай: r(A) = r(A с волной сверху)< m.. M – r(A) – дефект, количество свободных неизвестных. Пример:
б.м: х1, х2 св.м: х3, х4. х2 + х3 +2х4 = 1., х2 = 1 – а – 2b, х3 = а, х4 = b. х1 = -2х2 – х3 + х4 + 1 = -2 + 2а +4b – а + b+1 = -1 + а + 5b. Ответ: (-1 + а + 5b., 1 – а – 2b, а, b)Т.
Хо – общее решение ОСЛАУ Х (с волной) – общее решение НСЛАУ Прямая на плоскости. Простейшей из линий является прямая. Разным способам задания прямой соответствует в прямоугольной система координат разные виды ее уравнений. 1. Уравнение прямой с угловым коэффициентом: Пусть: tg Число tg Плоскость в пространстве. Простейшей поверхностью является плоскость. Плоскость в пространстве можно задавать различными способами. Каждому из них соответствует определенный вид ее уравнения. 1. Уравнение плоскости, проходящей через данную точку перпендикулярно данному вектору: Точка Мо(Хо, Уо), вектор
2. Уравнение плоскости, проходящей через три данные точки:
3. Нормальное уравнение плоскости: 4. Угол между двумя плоскостями:
5. расстояние от точки до плоскости:
Прямая в пространстве. 1. Канонические уравнения прямой линии в пространстве, или уравнения прямой с направляющими коэффициентами, имеют вид:
где x0, y0, z0 - координаты точки, через которую проходит прямая, а m, n и p - направляющие коэффициенты прямой, которые являются проекциями на координатные оси Ox, Oy, Oz направляющего вектора прямой. 2. В параметрическом виде уравнения прямой линии в пространстве записываются так:
3. Общие уравнения прямой: А1х +B1y + C1z + D1=0 A2x + B2y + C2z + D2=0 4. Векторное уравнение прямой: 5. уравнение прямой в пространстве, проходящей через две точки:
6. угол между прямыми:
Эллипс. Геометрическое место точек, сумма расстояний от которых до двух фиксированных точек плоскости (обычно называемых фокусных) постоянна, называется эллипсом. Если оси координат расположены так, что Ox проходит через фокусы F1(C, 0) и F2(-C, 0), а О(0, 0) совпадает с серед отрезка F1F2, то по F1М+F2M получаем: каноническое ур-ие эллипса b2=-(с2-a2). а и b- полуоси эллипса., а-большая, b-меньшая. Эксцентриситет. (если а< b) Эксцентриситет характеризует выпуклость эллипса. У эллипса эксцентриситет находится: 0 Случай Директрисы (D) Геометрическое место точек, отношение расстояний от которых до точки эллипса к расстоянию от этой точки эллипса до фокуса постоянно и равно величине Примечание: у окружности нет директрисы. Гипербола. Геометрическое место точек, модуль разности расстояний от которых до двух фиксированных точек плоскости постоянна, называется гиперболой. Каноническое уравнение гиперболы: Гипербола есть линия второго порядка. Гипербола имеет 2 асимптоты: Гипербола называется равносторонней, если ее полуоси равны. (а=b). Каноническое уравнение:
Эксцентриситет – отношение расстояния между фокусами к величине действительной оси гиперболы: Так как для гиперболы с> а, то эксцентриситет гиперболы > 1. Эксцентриситет характеризует форму гиперболы: Директрисы – прямые Фокальные радиусы: Есть гиперболы, которые имеют общие асимптоты. Такие гиперболы называются сопряженными. Парабола. Парабола – множество всех точек плоскости, каждая из которых одинаково удалена от данной точки, называемой фокусом, и данной прямой, называемой директрисой. Расстояние от фокуса до директрисы – параметр параболы (p> 0).- полуфокальный диаметр. Парабола есть линия второго порядка.
М(х, у) – произвольная точка параболы. Соединим точку М с F, проведем отрезок MN перпендикулярно директрисе. Согласно определению параболы MF=MN. По формуле расстояния между 2 точкам находим:
Каноническое уравнение параболы:
Эллипсоид. Исследуем поверхность, заданную уравнением: Рассмотрим сечения поверхности с плоскостями, параллельными плоскости xOy. Уравнения таких плоскостей: z=h, где h – любое число. Линия, получаемая в сечении, определяется двумя ур-ниями: z=h. Исследуем поверхность: А) если Б) если В) если h=0. Рассмотренные сечения позволяют изобразить поверхность как замкнутую овальную поверхность. Поверхность называется эллипсоидами., если какие-либо полуоси равны, трехосный эллипсоид превращается в эллипсоид вращения, а если а=b=c, то в сферу.
Гиперболоид и конус. 1. Исследуем поверхность z=h. или z=h полуоси: а1= полуоси достигают своего наименьшего значения при h=0: а1=а, b1=b. При возрастании h полуоси эллипса будут увеличиваться. =>
х=0. Анализ этих сечений показывает, что поверхность, определяемая уравнением, имеет форму бесконечной расширяющейся трубки. Поверхность называется однополостным гиперболоидом.
2.
3. Конус второй степени
a = b - конус вращения (прямой круговой).
Сечения конуса плоскостями: в плоскости, пересекающей все прямолинейные образующие, - эллипс; в плоскости, параллельной одной прямолинейной образующей, - парабола; в плоскости, параллельной двум прямолинейным образующим, - гипербола; в плоскости, проходящей через вершину конуса, - пара пересекающихся прямых или точка (вершина). 1. Каноническое уравнение:
p = q - параболоид вращения вокруг оси Oz. Сечения эллиптического параболоида плоскостями - либо эллипс, либо парабола, либо точка. 2.
Сечения гиперболического параболоида плоскостями - либо гипербола, либо парабола, либо пара прямых (прямолинейных образующих).
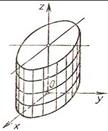
Цилиндрические поверхности. Поверхность, образованная движением прямой L, которая перемещается в пространстве, сохраняя постоянное направление и пересекая каждый раз некоторую кривую K, называется цилиндрической поверхностью или цилиндром при этом кривая К – направляющая цилиндра, а L – его образующая. Эллиптический цилиндр
Частным случаем эллиптического цилиндра является круговой цилиндр, его уравнение x2 + y2 = R2. Уравнение x2=2pz определяет в пространстве параболический цилиндр.
Уравнение:
Все эти поверхности называются цилиндрами второго порядка, так как их уравнения есть уравнения второй степени относительно текущих координат x, y, z.
Полярная система координат. Точка О называется полюсом, а луч l – полярной осью.
Суть задания какой- либо системы координат на плоскости состоит в том, чтобы каждой точке плоскости поставить в соответствие пару действительных чисел, определяющих положение этой точки на плоскости. В случае полярной системы координат роль этих чисел играют расстояние точки от полюса и угол между полярной осью и радиус– вектором этой точки. Этот угол j называется полярным углом.
Можно установить связь между полярной системой координат и декартовой прямоугольной системой, если поместить начало декартовой прямоугольной системы в полюс, а полярную ось направить вдоль положительного направления оси Ох. Действительные числа. Действительные числа образуют совокупность элементов, обладающую следующими свойствами. Если a и b - действительные числа (алгебраические, рациональные, целые, положительные целые), то таковыми же являются и 1. a + b и ab (замкнутость), 2. a + b = b + a, ab = ba (коммутативность), 3. a + (b + c) = (a + b) + c = a + b + c, a(bc) = (ab)c = abc (ассоциативность 4. a * 1 = a (единица), 5. a(b + c) = ab + ac (дистрибутивность), 6. из a + c = b + c следует a = b, из ca = cb, , следует a = b (сокращение).
Действительное число 0 (нуль) обладает свойствами a + 0 = a, a * 0 = 0 для каждого действительного числа a.
Действительные числа, не являющиеся рациональными, называются иррациональными. Действительными алгебраическими числами называются действительные корни алгебраических уравнений с целочисленными коэффициентами, а действительными трансцендентными числами - остальные действительные числа. Предел последовательности. Число а называется пределом последовательности, если для любого положительного числа Е найдется такое натуральное число N, что при всех n> N выполняется равенство:
Коротко определение предела: Сходящаяся последовательность имеет только один предел. Последовательность, неимеющая предела, называется расходящейся. Если Если
Предел функции. Сформулируем два, эквивалентных между собой, определения предела функции в точке: Определение ( по Коши): число А называется пределом функции в точке х0, если для любого положительного Коротко это определение:
Определение (по Гейне): Число А называется пределом функции Односторонние пределы: Предел слева записывают так: Аналогично определяется предел функции справа:
Пределы функции слева и справа называются односторонними пределами. Предел функции при Число А называется пределом функции при
Односторонние пределы.
Предел слева записывают так: Аналогично определяется предел функции справа:
Пределы функции слева и справа называются односторонними пределами. Сравнение бесконечно малых. Две б.м.ф. сравниваются между собой с помощью их отношения: 1. если 2. если 3. если 4. если Таковы же правила сравнения б.м.ф. при Эквивалентные бесконечно малые:
Теоремы о пределах. Теорема: если существует Теорема: если 1) 2) 3) Примечание 1: 1-е и 2-е свойства распространяются на любое конечное число слагаемых или сомножителей, однако число слагаемых и сомножителей не может быть Примечание 2: Теорема: если Следствие: если Теорема: если Теорема (о сжатой переменной): если Теорема (о пределе сложной функции): Пусть: х0,
Сама теорема: Если Дифференциал функции. Пусть функция y = f(x) имеет производную в точке х: Тогда можно записать: Следовательно: Величина aDx- бесконечно малая более высокого порядка, чем f¢ (x)Dx, т.е. f¢ (x)Dx- главная часть приращения Dу.
Определение. Дифференциалом функции f(x) в точке х называется главня линейная часть приращения функции. Обозначается dy или df(x). Из определения следует, что dy = f¢ (x)Dx или dy = f¢ (x)dx.
Свойства дифференциала. Если u = f(x) и v = g(x)- функции, дифференцируемые в точке х, то непосредственно из определения дифференциала следуют следующие свойства:
1) d(u ± v) = (u ± v)¢ dx = u¢ dx ± v¢ dx = du ± dv 2) d(uv) = (uv)¢ dx = (u¢ v + v¢ u)dx = vdu + udv 3) d(Cu) = Cdu Доказательство.
( с учетом того, что если Dx®0, то Du®0, т.к. u = g(x) – непрерывная функция) Тогда Матрицы И действия над матрицами. Матрица - прямоуг таблица чисел, содерж m-строк и n-столбцов. 1. Матрицы равны между собой, если равны соответств элементы этих матриц. 2. Матрица, в которой m=n наз квадратной или n-ого порядка. 3. Квадратная матрица, у которой все элементы, кроме элементов гл диагонали, равны 0 называется диагональной. 4. Диаг матрица, у которой каждый элемент главной диаг =1 наз единичной. 5. Квадратная матрица наз. треугольной, если все элементы, расположенные по одну сторону её гл диаг =0. 6. Матрица, у которой все числа, стоящие на гл диаг не нулевые, а также некоторое кол ненулевых строк, наз трапециевидной. 7. Матрица, содерж один столбец или строку, наз вектором из Rn пространства. Действия: · Сложение – только для матриц одинакового размера. · Умножение на число. Множества матриц одинакового размера обознач Mm*n. Тогда введённое на этом мн-ве операции сложения и умнож на число превращ Mm*n в линейное пр-во, векторами которого явл матрицы m*n. · Умножение на вектор-столбец. Для умножения матрицы на вектор-столбец надо, чтобы число столбцов матрицы было равно числу координат вектора. · Две матрицы наз эквивалентными, если одна из них получена из другой с помощью элементарным преобраз. любую матрицу можно привести к канонической.
Умножение матриц. Согласованные матрицы. Операция умножения двух матриц вводится только для случая, когда число столбцов первой матрицы равно числу строк второй матрицы. Произведением матрицы Аm*n = (ai, g) на матрицу Вn*p = (bi, k) называется матрица Сm*p = (сi, k) такая, что:
где i= Матрицы А, n*m и В, m*n, назыв. согласованными. (если А согласованно с В, то это не значит, что В согласованно с А). Смысл согласованности в том, чтобы количество столбцов 1-ой матрицы совпадало с количеством строк 2-ой матрицы. Для согласованных матриц можно определить операцию умножения. Если матрицы A и B квадратные и одного размера, то A*B и B*A всегда существуют. Транспонированием называется смена всех элементов столбца соотв элементами строки. Если AT=A, то матрица А наз. симметричная (она обязательно квадратная). --- Популярное: |
Последнее изменение этой страницы: 2016-05-30; Просмотров: 2169; Нарушение авторского права страницы
 ,
,  ,
,  , т.е. элемент i-той и k-ого столбца матрицы произведения С равен сумме произведений элементов i-той строки матрицы А на соответствующие элементы к-ого столбца матрицы В.
, т.е. элемент i-той и k-ого столбца матрицы произведения С равен сумме произведений элементов i-той строки матрицы А на соответствующие элементы к-ого столбца матрицы В.
 Аij
Аij , A-1 =
, A-1 =  A*Т
A*Т
 , Ак получается из А путем замены к-го столбца на столбец свободного члена В.
, Ак получается из А путем замены к-го столбца на столбец свободного члена В. ,
,  =k,
=k,  , тогда: y = kx + b.
, тогда: y = kx + b.


 .
.

 .
. .
.

 ,
,  , (если а> b)
, (если а> b) .
. =0 возникает только тогда, когда с=0, а это есть случай окружности – это эллипс с нулевым эксцентриситетом.
=0 возникает только тогда, когда с=0, а это есть случай окружности – это эллипс с нулевым эксцентриситетом. , называется директрисами.
, называется директрисами.  .
. , где
, где  .
. и
и 


 . Эксцентриситет равносторонней гиперболы равен равен
. Эксцентриситет равносторонней гиперболы равен равен  .
. .
. и
и  .
. =>
=>  =
=  =>
=>  =>
=>  то
то  Линия пересечения поверхности с плоскостямиz=h не существует.
Линия пересечения поверхности с плоскостямиz=h не существует. ,
,  линия пересечения вырождается в две точки (0, 0, с), и (0, 0, -с). Плоскости z = c, z = - c касается данной поверхности.
линия пересечения вырождается в две точки (0, 0, с), и (0, 0, -с). Плоскости z = c, z = - c касается данной поверхности. , то уравнения можно переписать в виде:
, то уравнения можно переписать в виде:  , как видно, линия пересечения есть эллипс с полуосями а1 =
, как видно, линия пересечения есть эллипс с полуосями а1 =  , b1 =
, b1 =  . При этом, чем меньше h, тем больше полуоси. При н=0 они достигают своих наибольших значений. а1=а, b1=b. Уравнения примут вид:
. При этом, чем меньше h, тем больше полуоси. При н=0 они достигают своих наибольших значений. а1=а, b1=b. Уравнения примут вид: 

 . Пересекая поверхностьплоскостью z=h, получим линию пересечения, уравнения которой имеет вид
. Пересекая поверхностьплоскостью z=h, получим линию пересечения, уравнения которой имеет вид

 b1=
b1= 


 - уравнение поверхности.
- уравнение поверхности. и
и  - поверхность, состоящая из 2 полостей, имеющих форму выпуклых неограниченных чаш. Поверхность называется двухполостным гиперболоидом.
- поверхность, состоящая из 2 полостей, имеющих форму выпуклых неограниченных чаш. Поверхность называется двухполостным гиперболоидом. 
 Каноническое уравнение:
Каноническое уравнение: 
 -это эллиптический параболоид.
-это эллиптический параболоид.  (р> 0, q> 0).
(р> 0, q> 0). - гиперболический параболоид.
- гиперболический параболоид. 
 Эллиптическое уравнение:
Эллиптическое уравнение: 

 определяет в пространстве гиперболический цилиндр.
определяет в пространстве гиперболический цилиндр. 
 . В этом случае пишут
. В этом случае пишут  и говорят, что последовательность {xn}имеет предел, равный числу а. говорят, что последовательность сходится к а.
и говорят, что последовательность {xn}имеет предел, равный числу а. говорят, что последовательность сходится к а. .
.  =0 => последовательность бесконечно малая.
=0 => последовательность бесконечно малая.  => бесконечно большая.
=> бесконечно большая.  =>
=>  .
. - окрестности точки а.
- окрестности точки а.  , что для всех х
, что для всех х  х0, удовлетворяющих неравенству
х0, удовлетворяющих неравенству  , выполняется неравенство
, выполняется неравенство  .
. .
. в точке х0, если для любой последовательности допустимых значений аргумента хn, сходящейся к х0, последовательность соответствующих значений функции
в точке х0, если для любой последовательности допустимых значений аргумента хn, сходящейся к х0, последовательность соответствующих значений функции  ,
,  , сходится к числу А.
, сходится к числу А. > 0 существует число
> 0 существует число  выполняется неравенство
выполняется неравенство  .
.
 .
. :
:  выполняется неравенство
выполняется неравенство 
 , то
, то  называются бесконечно малыми одного порядка.
называются бесконечно малыми одного порядка.  то
то  то
то  не существует, то
не существует, то  и
и  .
.
 ,
,  и
и  и они равны между собой, то существует
и они равны между собой, то существует  =
=  ,
,  , то =>
, то => 


 .
. и существуют конечные пределы, когда
и существуют конечные пределы, когда  .
. и существуют конечные пределы
и существуют конечные пределы 
 => существует:
=> существует:  , U=f(x),
, U=f(x),  .
.
 и существуют конечные пределы
и существуют конечные пределы  и
и  , то
, то 

 , где a®0, при Dх®0.
, где a®0, при Dх®0. .
. Можно также записать:
Можно также записать: 

 . Теорема доказана.
. Теорема доказана.