|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Основные типы опорных связей балок
Основные типы опорных связей балок 1. Шарнирно-подвижная опора (рис. 5.1, б - левая опора балки), ограничивающая лишь вертикальное перемещение опорного узла. 2. Шарнирно-неподвижная опора (рис. 5.1, б - правая опора балки), ограничивающая вертикальное и горизонтальное перемещения опоры. 3. Жесткая заделка (рис. 5.1, а - опора балки на левом краю), не допускающая поворота и перемещений по вертикали и горизонтали сечения балки, примыкающего к опоре. По запрещенным направлениям во всех этих типах опор возникают соответствующие реакции.
Теория пар сил на плоскость Система двух параллельных равных по модулю и направленных в разные стороны сил наз. Парой сил. Расстояние между силами называется плечом пары. Момент пары сил равных произведению одной из сил на плечо (Т1)Алгебраическая сумма моментов сил составляющих пару относительно любой точки плоскости независит от выбора точки и равна моменту пары. (Т2)Не нарушая состояние твердого тела пару сил можно переносить в плоскость ее действия (Т3) При сложении нескольних пар сил действующих на плоскость получается равнодействующая пара. Момент которпой равен сумме моментов сложенных пар. (Т4) Для равновесия твердого тела по действием пар сил, лежащих в одной плоскости необходимо и достаточно чтобы равнодействующая пара сил была равна нулю.
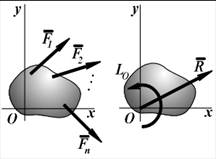
Главный вектор и главный момент Рассмотрим плоскую систему сил (F1, F2, ..., Fn), действующих на твердое тело в координатной плоскости Oxy.
Главным вектором системы сил называется вектор R, равный векторной сумме этих сил:
R = F1 + F2 +... + Fn = Fi. Для плоской системы сил ее главный вектор лежит в плоскости действия этих сил.
Главным моментом системы сил относительно центра O называется вектор LO, равный сумме векторных моментов этих сил относительно точки О:
LO = MO(F1) + MO(F2) +... + MO(Fn) = MO(Fi). Вектор R не зависит от выбора центра О, а вектор LO при изменении положения центра О может в общем случае изменяться.
Для плоской системы сил вместо векторного главного момента используют понятие алгебраического главного момента. Алгебраическим главным моментом LO плоской системы сил относительно центра О, лежащего в плоскости действия сил, называют сумму алгебраических моментов этих сил относительно центра О.
Главный вектор и главный момент плоской системы сил обычно вычисляется аналитическими методами.
Условия равновесия произвольной пространственной системы сил Для равновесия твердого тела, находящегося под действием произвольной пространственной системы сил, необходимо и достаточно, чтобы главный вектор этой системы сил и ее главный момент относительно произвольного центра О были равны нулю:
R = 0, LO = 0.
Вытекающие отсюда аналитические условия равновесия (уравнения равновесия) пространственной системы сил можно сформулировать следующим образом:
Для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех координатных осей и сумма их моментов относительно этих осей были равны нулю:
Fix = 0; Fiy = 0; Fiz = 0;
MOx(Fi) = 0; MOy(Fi) = 0; MOz(Fi) = 0.
Если на тело кроме сил действуют пары сил, заданные их векторными моментами Mk, то при этом вид первых трех уравнений равновесия не изменится (сумма проекций сил пары на любую ось равна нулю), а в последние три уравнения добавляются суммы проекций векторов Mk на координатные оси:
MOx(Fi) + Mkx = 0; MOy(Fi) + Mky = 0; MOz(Fi) + Mkz = 0.
Уравнения равновесия твердого тела под действием плоской системы параллельных сил (начало в билете 4)
В частном случае, если все силы плоской системы параллельны, то условия равновесия таких сил выражаются не тремя, а двумя уравнениями: Fiy = 0; MO(Fi) = 0 причем ось Ох параллельна данным силам.
Координаты центра тяжести однородного тела
Матрица перехода из общей системы координат в местную
Учет граничных условий матрица R, сформированная в билете 11, получена без учета опорных закреплений. Такая матрица соответствует конструкции, " висящей в воздухе" и не закрепленной от перемещений как жесткого целого. Она является особенной, т.е. не имеет обратной матрицы. Существует прием, позволяющий учесть опорные связи. Рассмотрим его. Перемещения по направлению закрепленных связей заведомо равны нулю. Чтобы получить нулевое решение некоторой j-ой позиции вектора Z, применяют " прием вычеркивания". Состоит он в том. Что j-й столбец и j - ю строку в матрице R, а также свободный член в j-м уравнении делают нулевыми. На место диагонального элемента гjj посылают некоторое число, например, единицу. Эта операция не изменяет порядка матрицы R и дает нулевые значения заданных перемещений.
Диаграмма растяжения 29-30 Теория пар сил на плоскость Учет граничных условий Диаграмма растяжения Основные типы опорных связей балок 1. Шарнирно-подвижная опора (рис. 5.1, б - левая опора балки), ограничивающая лишь вертикальное перемещение опорного узла. 2. Шарнирно-неподвижная опора (рис. 5.1, б - правая опора балки), ограничивающая вертикальное и горизонтальное перемещения опоры. 3. Жесткая заделка (рис. 5.1, а - опора балки на левом краю), не допускающая поворота и перемещений по вертикали и горизонтали сечения балки, примыкающего к опоре. По запрещенным направлениям во всех этих типах опор возникают соответствующие реакции.
Теория пар сил на плоскость Система двух параллельных равных по модулю и направленных в разные стороны сил наз. Парой сил. Расстояние между силами называется плечом пары. Момент пары сил равных произведению одной из сил на плечо (Т1)Алгебраическая сумма моментов сил составляющих пару относительно любой точки плоскости независит от выбора точки и равна моменту пары. (Т2)Не нарушая состояние твердого тела пару сил можно переносить в плоскость ее действия (Т3) При сложении нескольних пар сил действующих на плоскость получается равнодействующая пара. Момент которпой равен сумме моментов сложенных пар. (Т4) Для равновесия твердого тела по действием пар сил, лежащих в одной плоскости необходимо и достаточно чтобы равнодействующая пара сил была равна нулю.
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 776; Нарушение авторского права страницы