
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Исследование плоскопараллельного движения твердого тела
Плоский механизм состоит из стержней 1-4 и ползуна B, соединенных друг с другом и с неподвижными опорами O1 и O2 шарнирами (рис. К2.0-К2.9). Длины стержней: Дуговые стрелки на рисунках показывают, как при построении чертежа должны откладываться соответствующие углы, т.е. по ходу или против хода часовой стрелки (например, угол γ на рис.1 следует отложить от стержня DE против хода часовой стрелки, а на рис. 2 – от стержня АЕ по ходу часовой стрелки. Построение чертежа начинать со стержня, направление которого определяется углом a, ползун В и его направляющие для большей наглядности изобразить, как в примере К2 (см. рис. К2). Заданную угловую скорость считать направленной против хода часовой стрелки, а заданную скорость vВ – от точки В к b.
Указания. Задача К2 - на исследование плоскопараллельного движения твердого тела. При ее решении для определения скоростей точек механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела, мгновенным центром скоростей. Таблица К2
Пример К2. Найти для заданного положения механизма скорости и ускорения точек В и С, а также угловую скорость и угловое ускорение звена, которому эти точки принадлежат.
wАВ= vА / АРАВ; где АРАВ – расстояние от точки А до полюса, которое является катетом прямоугольного равнобедренного Δ АРВ: wАВ=20/10=2 рад/с; Т.к. полученный Δ АРВ – прямоугольный и равнобедренный, то vА= vВ/cos45°=20/ cos45°=28, 28 см/с. Определим скорость точки С: vС= wАВ·СРАВ ; где СРАВ – расстояние от точки С до полюса, определяется по теореме Пифагора: vС =2·11, 18=22, 36 см/с. 4) Определим ускорение точки А. Оно геометрически складывается из нормального и касательного ускорений: Нормальное ускорение определяется по формуле:
Касательное ускорение определяется по формуле:
5) Определим ускорение точки В:
где вектор
Спроецируем векторы ускорений на оси Ох и Оу. Ось Ох направляем вдоль шатуна АВ, ось Оу ей перпендикулярна:
Из уравнений находим:
знак минус показывает, что вектор
знак минус показывает, что вектор 6) Определим угловое ускорение звена АВ: ε АВ = Ответ. vВ = 28, 3см/с, vС = 22, 36см/с, ω АВ =2рад/с, аА=72, 1см/с2, аВ = 141, 4см/с2, Задача К3 Сложное движение точки Прямоугольная пластина (рис. К3.0 - К3.5) или круглая пластина радиусом R = 60 см (рис. К3.6 – К3.9) вращается вокруг неподвижной оси с постоянной угловой скорость ω, заданной в табл. КЗ (при знаке минус направление ω противоположно доказанному на рисунке). Ось вращений на рис. K3.0 - K3.3 и К3.8 – 3.9 перпендикулярна плоскости пластины и проходит через точку О(пластина вращается в своей плоскости); на рис. К3.4 - К3.7 ось вращения ОО1лежит в плоскости пластины (пластина вращается в пространстве).
Таблица К3
По пластине вдоль прямой BD (рис. K3.0-K3.5) или по окружности радиуса R, т.е. по ободу пластины (рис. К3.6-К3.9), движется точка М. Закон ее относительного движения, выражаемый уравнением s = AM = f(t) (s – в сантиметрах, t – в секундах), задан в табл.К3 отдельно для рис.К3.0-К3.5 и для рис.К3.6-К3.9, при этом на рис. 6-9 s = Определять абсолютную скорость и абсолютное ускорение точки М в момент времени t1 = 1с. Указания. Задача К3 - на сложное движение точки. При ее решении движение точки по пластине считать относительным, а вращательное движение самой пластины – переносным и воспользоваться теоремами о сложении скоростей и о сложении ускорений. Прежде чем производить расчеты, следует изобразить точку М на пластине в том положении, в котором нужно определить ееабсолютную скорость (или ускорение), а не в произвольном положении, показанном на рисунках к задаче. В случаях, относящихся к рис.К3.6-К3.9, при решении задачи не подставлять числового значении R, пока не будут определены положение точки М в момент времени t1 = 1 с и угол между радиусами СМ и САвэтот момент.
Пример К3. Точка М движется относительно тела D. По заданным уравнениям относительного движения точки М и движения тела D определить для момента времени t=t1 абсолютную скорость и абсолютное ускорение точки М.
Решение: 1) Положение точки М в момент времени t1 =2 с: Sr1= 10·3, 14·sin(π ·2/12)=15, 71 см. За время t1 точка М проходит 1/12 часть окружности, т.е. 30˚. 2) Абсолютная скорость точки М находится как геометрическая сумма относительной и переносной скоростей:
vr= в момент времени t1 =2с: vr1= вектор относительной линейной скорости направлен по касательной к траектории относительного движения; абсолютная скорость:
3) Абсолютное ускорение точки М находится как геометрическая сумма относительного, переносного и кориолисового ускорений:
Модуль относительного тангенциального ускорения:
в момент времени t1 =2/3с: Относительное нормальное ускорение:
его вектор направлен от точки М к центру относительной траектории К. Модуль переносного углового ускорения: eе= Знак минус означает, что переносное движение является замедленным. Переносное тангенциальное ускорение:
Кориолисово ускорение определяется по формуле:
его вектор направлен вдоль оси Ох, в сторону противоположную модуль кориолисова ускорения: где акор = 2·3, 73·21, 4=159, 6 см/с2. Модуль абсолютного ускорения находим методом проекций: ах = ау = аz =
Ответ:
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 1395; Нарушение авторского права страницы
 = 0, 4 м,
= 0, 4 м,  = 1, 2 м,
= 1, 2 м,  = 1, 4 м,
= 1, 4 м,  = 0, 8 м. Положение механизма определяется углами a, b, γ, j, q, которые вместе с другими величинами заданы в табл. К2. Точка D на всех рисунках и точка К на рис. К2.7-К2.9 в середине соответствующего стержня. Определите величины, указанные в таблице в столбце «Найти». Найти также ускорение аА точки А стержня 1, если стержень 1 имеет а данный момент времени угловое ускорение
= 0, 8 м. Положение механизма определяется углами a, b, γ, j, q, которые вместе с другими величинами заданы в табл. К2. Точка D на всех рисунках и точка К на рис. К2.7-К2.9 в середине соответствующего стержня. Определите величины, указанные в таблице в столбце «Найти». Найти также ускорение аА точки А стержня 1, если стержень 1 имеет а данный момент времени угловое ускорение  .
.
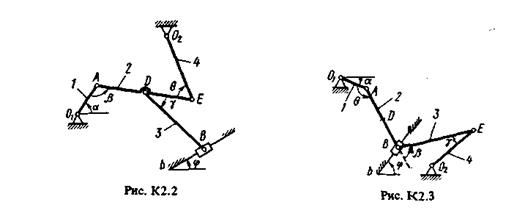

 Рис. 6
Рис. 6
 Рис. 7
Рис. 7
 см;
см;  .
. =22·10=40 см/с2;
=22·10=40 см/с2; 
 см/с2.
см/с2. ,
,  нормальное ускорение точки В во вращательном движении шатуна АВ вокруг полюса А; вектор
нормальное ускорение точки В во вращательном движении шатуна АВ вокруг полюса А; вектор  =22·10=40 см/с2;
=22·10=40 см/с2;  - вектор касательного ускорения точки В во вращательном движении шатуна АВ вокруг полюса А; вектор
- вектор касательного ускорения точки В во вращательном движении шатуна АВ вокруг полюса А; вектор  направлена горизонтально, его величина и направление пока неизвестны, задаём направление произвольно.
направлена горизонтально, его величина и направление пока неизвестны, задаём направление произвольно.
 Рис. 8
Рис. 8
 ;
;  .
. = - 141, 4 см/с2;
= - 141, 4 см/с2;  -60 см/с2,
-60 см/с2,  направлен в сторону, противоположную указанному на рисунке.
направлен в сторону, противоположную указанному на рисунке. =6 рад/с2.
=6 рад/с2. = 40см/с2,
= 40см/с2,  = 60 см/с2,
= 60 см/с2,  = 40 см/с2,
= 40 см/с2,  = -60 см/с2, ε АВ = 6 рад/с2
= -60 см/с2, ε АВ = 6 рад/с2
 = f(t)
= f(t)














 Рис. 9
Рис. 9
 .
. =4 – 0, 2·2t = 4 – 0.4t, рад/с;
в момент времени t1 =2с
wе1=4 – 0.4·2/3=3, 73 рад/с;
переносная окружная скорость:
ve=R·wе=30·3.73=112 см/с;
её вектор направлен вдоль оси Ох.
относительная линейная скорость:
=4 – 0, 2·2t = 4 – 0.4t, рад/с;
в момент времени t1 =2с
wе1=4 – 0.4·2/3=3, 73 рад/с;
переносная окружная скорость:
ve=R·wе=30·3.73=112 см/с;
её вектор направлен вдоль оси Ох.
относительная линейная скорость:
 Рис. 10
Рис. 10
 ;
;  =21.4 см/с;
=21.4 см/с;  cм/c.
cм/c. .
. ,
,  = - 9, 69 см/с2; отрицательный знак показывает, что вектор
= - 9, 69 см/с2; отрицательный знак показывает, что вектор  направлен в сторону отрицательных значений Sr. Знаки
направлен в сторону отрицательных значений Sr. Знаки  и
и  =15.3 см/с2;
=15.3 см/с2;  = - 0.4, рад/с2,
= - 0.4, рад/с2,  ,
,  направлен вдоль оси Ох в сторону противоположную
направлен вдоль оси Ох в сторону противоположную  .
r = R·cos30˚ =30·cos30˚ =26.0 см,
.
r = R·cos30˚ =30·cos30˚ =26.0 см,
 =3, 73·26=96.9 см/с2;
его вектор направлен от точки М к точке С.
=3, 73·26=96.9 см/с2;
его вектор направлен от точки М к точке С.
 Рис. 11
Рис. 11
 ,
,  , согласно правилу векторного произведения;
, согласно правилу векторного произведения;  ,
,  =sin 30˚ =0, 5.
=sin 30˚ =0, 5. – акор =10.4 – 159.6= –149.2 см/с2;
– акор =10.4 – 159.6= –149.2 см/с2;  = – 96.9 – 15.3·cos30˚ +9.69·cos60˚ = – 105.3 см/с2;
= – 96.9 – 15.3·cos30˚ +9.69·cos60˚ = – 105.3 см/с2;  = – 15.3·sin30˚ – 9.69·sin60˚ = – 16.0 см/с2;
= – 15.3·sin30˚ – 9.69·sin60˚ = – 16.0 см/с2;  183.3 cм/c2.
183.3 cм/c2. = 114 м/с,
= 114 м/с,  = 183, 3 м/с2.
= 183, 3 м/с2.