
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Пространственная система сил
Если система сил находится в равновесии, то в равновесии находится и эквивалентная ей система, состоящая из главного вектора и главного момента пары. Чтобы такая система сил была эквивалентна нулю, необходимо и достаточно, чтобы выполнялось условие: Эти условия являются векторными условиями равновесия для любой системы сил. В аналитической форме это эквивалентно условиям: Rx=Ry=Rz=0; Mx=My=Mz=0,
Система параллельных сил (рис. 15) Пусть Fi параллельно оси Oz, тогда Mz тождественно равно нулю и
Рис.15 Плоская система сил (рис. 16)
,
имеем три уравнения равновесия:
Рис.16
Для плоской системы параллельных сил (Рис. 17) имеем лишь два уравнения равновесия:
Рис.17 Различные формы условий равновесия плоской системы сил : 1. Ранее приведенная система
2. Эквивалентная ей система уравнений равновесия для любых трех точек, не лежащих на одной прямой.
3. Также эквивалентная первой система
для любых точек А и В, если ось X не перпендикулярна отрезку АВ. Для плоской системы параллельных сил имеем аналогичную систему уравнений равновесия Статически определимые и неопределимые системы Для любой системы сил для разрешимости задач необходимо, чтобы число неизвестных сил не превышало максимального числа возможных уравнений равновесия. Такие задачи называют статически определимыми. В противном случае задача будет статически неопределимой в рамках модели абсолютно твердого тела. Статически неопределимые задачи решаются методами механики твёрдого деформируемого тела.
КИНЕМАТИКА Основные понятия Кинематикой называется раздел механики, в которой изучаются геометрические свойства движения тел без учета их инертности (массы) и действующих на них сил. Под движением мы понимаем в механике изменение с течением времени положения данного тела в пространстве по отношению к другим телам.
Кинематика точки. Скорость и ускорение точки В декартовых координатах
Рис. 18
Скорость и ускорение точки М в некоторый момент времени:
Обозначим через S длину дуги траектории, отсчитываемой с соответствующим знаком от первоначального положения точки на траектории:
Тогда, очевидно,
Годограф.К началу неподвижной системы координат О приложим вектор ОР, равный по величине и направлению скорости движущейся точки. При движении точки М по ее траектории точка Р описывает некоторую кривую, называемую годографом скорости точки М. Очевидно, скорость точки годографа Р равна по определению ускорению точки М. Скорость и ускорение точки В естественной системе координат
Определим орт
Составим отношение: где k − кривизна траектории, R − радиус кривизны траектории. Третий орт Определим скорость и ускорение точки в естественной системе координат:
; то есть
Таким образом, скорость точки всегда направлена по касательной к траектории.
Из последних соотношений получим формулу:
Скорость и ускорение точки в полярных координатах Положение точки на плоскости известно, если заданы радиус-вектор
Введем единичный вектор Для скорости получаем:
Рис. 19
Для производной по времени от единичного вектора имеем:
После этого для скорости точки в полярных координатах получаем:
Таким образом, радиальная и трансверсальная составляющие вектора скорости имеют вид:
Для ускорения легко получить:
Скорость и ускорение точек в цилиндрических Координатах
Положение точки М в пространстве определяют заданием трех ее цилиндрических координат как функций времени (рис. 20):
Разложение векторов скорости и ускорения на составляющие, параллельные осям цилиндрической системы координат Or, Op, Oz выразится в следующей форме:
Рис. 20
где
Скорость точки получим дифференцированием радиус-вектора
Первое слагаемое в этом выражении вычислялось при выводе скорости точки в полярных координатах. Во втором слагаемом постоянный по модулю и направлению единичный вектор
то есть, имеем,
Сложное движение точки Рассмотрим движение точки М по траектории в пространстве (рис. 21). Будем рассматривать параметры ее движения из неподвижной системы Oxyz и подвижной системы O'x'y'z'.
Рис. 21 Продифференцировав это соотношение по времени, получим:
– абсолютная скорость точки (относительно системы S),
– скорость начала координат S' относительно S,
Теперь для скоростей имеем:
, где vh–переносная, v – абсолютная, v’ – относительная скорость точки, то есть, получена связь этих скоростей. Переносная скорость состоит из двух слагаемых: первое присутствует в том случае, если подвижная система отсчета движется поступательно, второе появляется в том случае, если подвижная система отсчета совершает вращение. Для получения связи ускорений продифференцируем по времени соотношение для скоростей:
где Используем соотношение
или
здесь переносное ускорение состоит из трех компонент. Первая Кориолисово ускорение Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 751; Нарушение авторского права страницы
 ( где О – произвольная точка)
( где О – произвольная точка) то есть в самом общем случае имеем шесть скалярных уравнений равновесия (уравнений статики).
то есть в самом общем случае имеем шесть скалярных уравнений равновесия (уравнений статики). .
. Таким образом, имеем три уравнения равновесия
Таким образом, имеем три уравнения равновесия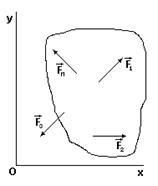 После отбрасывания тождеств:
После отбрасывания тождеств: 






 для любых точек А и В.
для любых точек А и В. 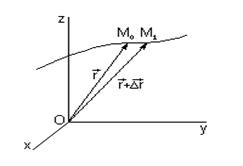 Положение точки М0 определяем радиус-вектором
Положение точки М0 определяем радиус-вектором  (рис. 18). Если точка движется относительно системы отсчета Oxyz, то ее координаты будут функциями времени:
(рис. 18). Если точка движется относительно системы отсчета Oxyz, то ее координаты будут функциями времени: 







 , он направлен по касательной к траектории. Вектор
, он направлен по касательной к траектории. Вектор  ортогонален к орту
ортогонален к орту  .
.
 определим как
определим как 




 то есть
то есть и полярный угол φ как функции времени (рис. 19):
и полярный угол φ как функции времени (рис. 19): 
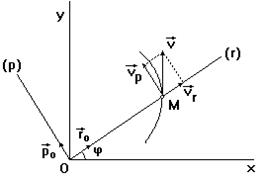
 , направленный по радиус-вектору от полюса О к точке М. Тогда
, направленный по радиус-вектору от полюса О к точке М. Тогда 





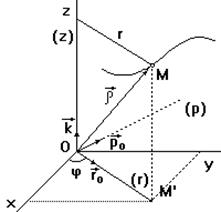



 – единичные векторы, направленные по осям цилиндрической системы координат. Оси Or и Opрасположены в одной плоскости с осями Ox и Oy.
– единичные векторы, направленные по осям цилиндрической системы координат. Оси Or и Opрасположены в одной плоскости с осями Ox и Oy. Представим радиус-вектор
Представим радиус-вектор  точки М как сумму двух векторов, т.е.
точки М как сумму двух векторов, т.е. по времени:
по времени: 
 можно вынести за знак производной. В итоге для скорости получается следующее разложение на составляющие осям цилиндрической системы координат:
можно вынести за знак производной. В итоге для скорости получается следующее разложение на составляющие осям цилиндрической системы координат: 
 так как составляющие скорости, параллельные осям цилиндрической системы координат, взаимно перпендикулярны, то для модуля скорости имеем:
так как составляющие скорости, параллельные осям цилиндрической системы координат, взаимно перпендикулярны, то для модуля скорости имеем: 
 Ускорение точки получим дифференцированием по времени вектора скорости:
Ускорение точки получим дифференцированием по времени вектора скорости: 
 Первое слагаемое в этом выражении вычислялось при выводе ускорения в полярных координатах. Во втором слагаемом орт оси z выносим за знак производной. Получим выражение для ускорения точки в составляющих, параллельных осям цилиндрической системы координат:
Первое слагаемое в этом выражении вычислялось при выводе ускорения в полярных координатах. Во втором слагаемом орт оси z выносим за знак производной. Получим выражение для ускорения точки в составляющих, параллельных осям цилиндрической системы координат: 
 Начало отсчета О' может двигаться посту-пательно и система O'x'y'z' может совершать вращение относительно оси, проходящей через точку О' с угловой скоростью
Начало отсчета О' может двигаться посту-пательно и система O'x'y'z' может совершать вращение относительно оси, проходящей через точку О' с угловой скоростью  и угловым ускорением
и угловым ускорением 




 не является скоростью точки М относительно системы S', так как орты этой системы являются функциями времени.
не является скоростью точки М относительно системы S', так как орты этой системы являются функциями времени. ,
,  Последнее слагаемое означает, что производная берется при неизменных ортах системы O’x’y’z’: .
Последнее слагаемое означает, что производная берется при неизменных ортах системы O’x’y’z’: .
 – абсолютное ускорение,
– абсолютное ускорение,  – ускорение начала координат S’ относительно S.
– ускорение начала координат S’ относительно S. , ранее полученное для
, ранее полученное для  и справедливое для любого вектора, разлагаемого по ортам S’, которая вращается относительно неподвижной системы отсчета:
и справедливое для любого вектора, разлагаемого по ортам S’, которая вращается относительно неподвижной системы отсчета: 

 присутствует, если подвижная система отсчета движется поступательно и при этом неравномерно, вторая появляется при неравномерном вращении подвижной системы отсчета и третья, называемая центростремительным ускорением, присутствует всегда, если подвижная система отсчета просто вращается.
присутствует, если подвижная система отсчета движется поступательно и при этом неравномерно, вторая появляется при неравномерном вращении подвижной системы отсчета и третья, называемая центростремительным ускорением, присутствует всегда, если подвижная система отсчета просто вращается. присутствует у точки при двух условиях: если подвижная система отсчета вращается и точка движется относительно подвижной системы отсчета и вектор
присутствует у точки при двух условиях: если подвижная система отсчета вращается и точка движется относительно подвижной системы отсчета и вектор  не параллелен вектору
не параллелен вектору  .
.