|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Проектирование систем управления двигателем постоянного тока
Проектирование систем управления двигателем постоянного тока Курсовая работа по дисциплине «АЭП НГО»
студентка гр. 8291 _____________ Е.А. Маликова (подпись)
руководитель _____________ С.В. Леонов (подпись)
Томск 2012г. Министерство образования Российской Федерации Государственное образовательное учреждение высшего профессионального образования «ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра_____________________
УТВЕРЖДАЮ: Зав. кафедрой____________(И.О.Ф.) (Подпись, дата)
ЗАДАНИЕ на выполнение курсовой работы
Студентке гр. 8291 Маликовой Екатерине Александровне
1Тема курсовой работы _______________________________________________________
(утверждена приказом ректора (распоряжением декана) от____№___
2 Срок сдачи студентом готовой работы_____________________
3 Исходные данные к работе
1. Нагрузочная диаграмма.
2. Исходные данные. Момент: М1=5Н*м М2=4Н*м М3=3Н*м М4=1Н*м М5=2Н*м Время: t1=10 сек. t2=13 сек. t3=7 сек. t4=11 сек. t5=19 сек. Угловая скорость: ω 1=88 рад/с ω 2=44 рад/с ω 3=22рад/с ω 4=11 рад/с ω 5=5.5 рад/с Температура: tº =20º C Напряжение питания: Uпит=220В Время переходного процесса: tпп=10% от интервала, т.е. Ошибка регулирования в установившемся режиме на больше 5%
Руководитель________________ (И.О.Ф.) (подпись, дата) Задание принял к исполнению ____________________________ (И.О.Ф.) (подпись, дата)
Содержание Введение. 6 1.1 Двигатель постоянного тока. 7 1.2 Выбор элементов, расчет параметров силовой части………………………8 1.3 Подбор силового драйвера. 12 1.4 Выбор датчиков тока и скорости. 13 1.5 Выбор микроконтроллера. 15 2.1 Выбор функциональной схемы системы управления двигателем постоянного тока 18 2.2 Синтез регуляторов методом модального оптимума. 19 2.3 Расчет контура тока. 20 2.4 Расчет контура скорости. 22 3.1 Моделирование процесса в пакете MatLab Simulink. 23 Заключение. 24 Список использованных источников. 25
Введение В данном курсовом проекте осуществляется подбор двигателя постоянного тока по определенным параметрам, заданным в варианте задания. Рассматриваются вопросы подбора схемы питания и выбора ее частей из линейки элементов, выпускаемых промышленностью; проектируется схема управления, в том числе: осуществляется выбор подходящего силового драйвера, МК, датчиков тока и скорости. По окончании расчетов системы электропривода будет произведено моделирование системы в пакете MatLab Simulink.
Двигатель постоянного тока. Двигатель постоянного тока — электромеханический преобразователь энергии электрической в механическую, работающий от сети постоянного тока и имеющий в составе щёточно-коллекторный узел.
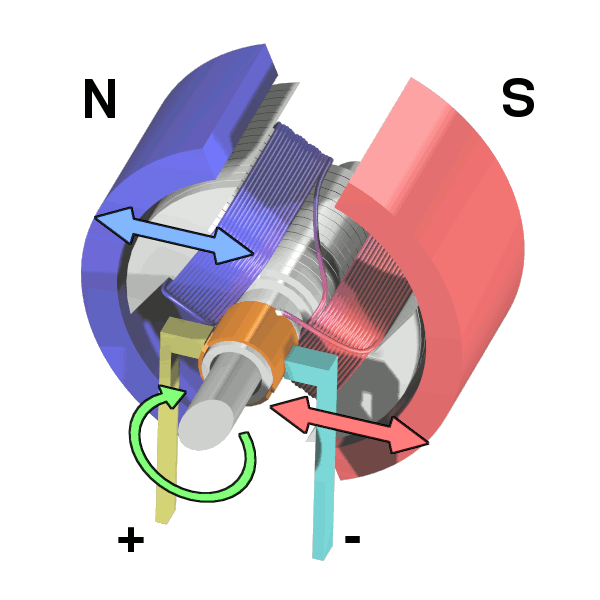
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором. Принцип действия основан на взаимодействии основного магнитного поля главных полюсов, с магнитным полем якоря вращающегося внутри. Поле якоря образуется (рамки с током) протекающим по обмотке постоянным электрическим током, который в каждый момент в зависимости от положения якоря протекает по одной из фаз. Щеточно-коллекторный узел выполняет роль электромеханического преобразователя рода тока постоянного в переменный и коммутатора, подключая в текущий момент времени ту фазу обмотки якоря (катушку), который формирует максимальный электрический момент.
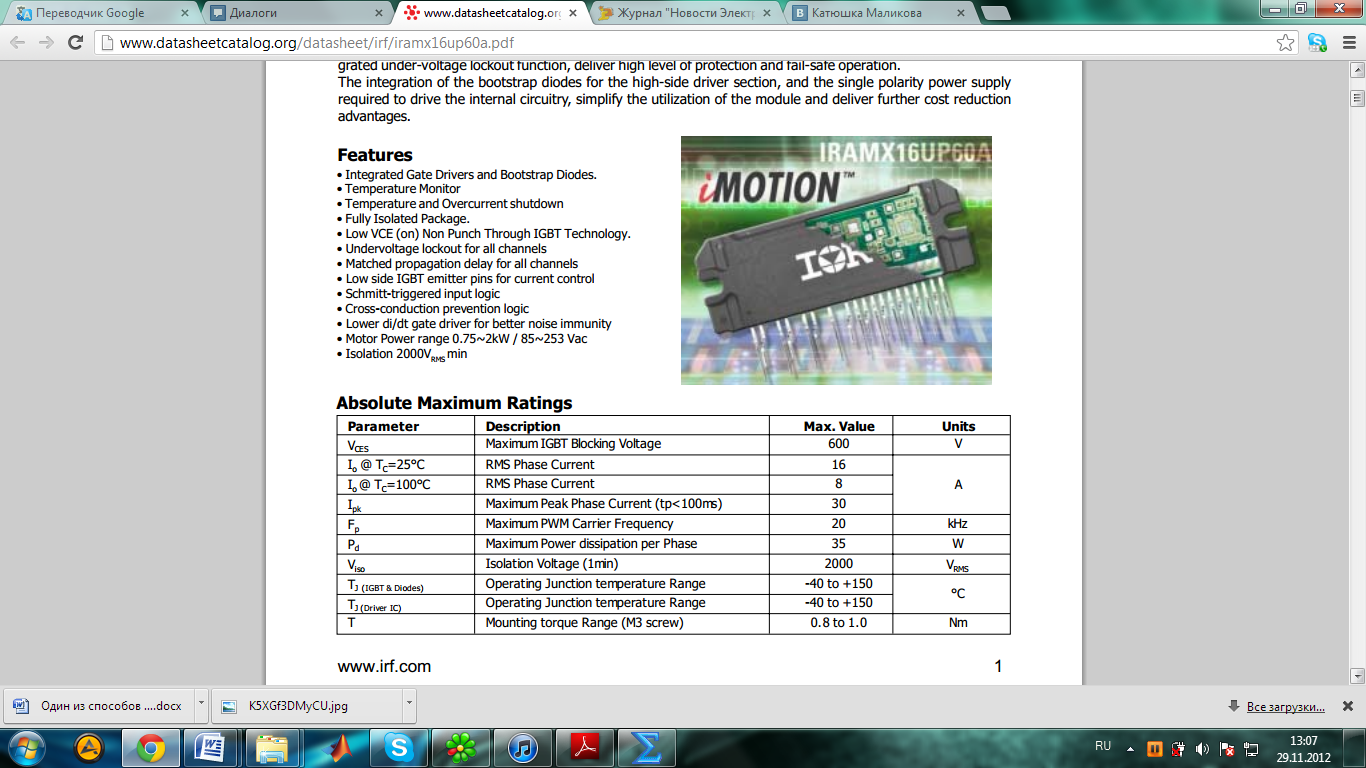
Подбор силового драйвера. Необходимые условия для подбора силового драйвера: Интеллектуальный силовой драйвер должен содержать встроенные элементы токовой, температурной защиты, защиты от перенапряжения, встроенные датчики тока и скорости. При этом: · ток силового драйвера > 6.5 А, · Пусковой ток < Предельного тока драйвера, · Напряжение силового драйвера > 110В
Наиболее подходящий по параметрам силовой драйвер - IRAMX16UP60A.
Рис. 3 Силовой драйвер IRAMX16UP60A. Характеристики драйвера Таблица 3 Из таблицы 3 видно, что данный драйвер полностью удовлетворяет заданным параметрам, а именно Напряжение драйвера больше напряжения двигателя 600В> 110В Максимальный ток больше тока пускового 30A> 16.25A Ток силового драйвера > номинального тока двигателя 8A> 6.5A Функциональная схема силового драйвера:
Рис. 4 Функциональная схема силового драйвера. Выбор микроконтроллера. Микроконтроллер — микросхема, предназначенная для управления электронными устройствами. Требования к микроконтроллеру: 1). Устройство управления должно получать от задающего устройства некую информацию. Это могут быть: требуемая скорость движения исполнительного механизма, выбор варианта режима работы, коэффициенты автоматического регулирования и любая другая информация, необходимая для автономного управления приводом. В качестве задающего устройства могут быть компьютер, другие контроллеры многопроцессорной системы, пульт дистанционного управления и другие, вплоть до нескольких кнопок или регуляторов бытового прибора. В первом случае нужен стандартный интерфейс: USB, SPI, I2C. Во втором, оптимальным вариантом представляется протокол CAN. Для пульта дистанционного управление необходим IrDA - канал передачи данных в инфракрасном диапазоне. Для кнопок и регуляторов - наличие цифровых линий ввода-вывода и аналогового ввода. 2). Устройство управления должно получать информацию от датчиков обратной связи и выдавать управляющие воздействия на электродвигатель через силовой драйвер. Поскольку эти процессы проходят непрерывно, то желательно минимизировать вычислительную нагрузку от этих операций на микроконтроллер. Именно для автономной реализации этих задач во многих микропроцессорах используются модули захвата/сравнения/ШИМ (или Capture/Compare/PWM). При выборе микроконтроллера необходимо соотносить требования решаемой задачи и параметры таймерной системы: количество входов захвата, выходов сравнения, выходов сигналов с широтно-импульсной модуляцией, а также количество и разрядность внутренних таймеров общего назначения. 3). В большинстве случаев при подключении электродвигателя используют падение напряжения на токовом датчике. Эти сигналы редко применяются в контуре управления, но их желательно использовать в качестве сигналов аварийного отключения. Соответственно, микроконтроллер, используемый как устройство управления электроприводом, должен иметь достаточное количество входов аналогового ввода (АЦП или аналоговых компараторов). Рис.5 Семейство 32-разрядных микроконтроллеров STM32F
Отличительные особенности архитектуры семейства STM32F с точки зрения задач управления приводами (помимо ARM-ядра):
Область применения 32-разрядных микроконтроллеров - прецизионные приводы, а именно - оборудование для точной механики, оптических систем, научного приборостроения. Возможности приборов класса STM32F позволяют не только управлять многими приводами, увязывая работу в единый алгоритм, но и использовать при этом достаточно сложные в вычислительном отношении алгоритмы обработки. Расчет контура тока.
, где Кт – коэффициент обратной связи по току ан- коэффициент настройки контура, принимаемый равным 2, что соответствует настройке на оптимум с показаниями переходных процессов.
Выразим
, где Произведем расчеты:
, отсюда
J– момент инерции якоря кг*м2 J*5 – момент инерции всего механизма
Найдем При режиме холостого хода произведение
Таким образом, можем найти передаточную функцию
Расчет контура скорости.
Составим выражение:
Выразим
Заключение В ходе выполнения курсового проекта был выбран двигатель постоянного тока - ДК1-5, 2, с подходящими параметрами. Так же был осуществлен подбор силового драйвера, датчиков тока и скорости и микроконтроллера. Рассчитаны все передаточные функции, входящие в систему управления электроприводом. Данная схема была смоделирована в пакете MatLab Simulink, в результате чего был получен сходящийся переходный процессии и выявлены следующие параметры: tпп= 0.000872, перерегулирование – 8.25%. В результате выполнения курсового проекта были получены новые практические навыки в подборе необходимых элементов схемы и углублены знания в области текущей дисциплины.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 1. [электронный ресурс]. – Режим доступа: http: //www.gaw.ru/html.cgi/txt/publ/powersuply/rohm_revers.htm. 2. Первичные преобразователи, датчики, компоненты автоматизации производства, системы безопасности, КИПиА. Датчики тока. Датчики тока с выходом по току: каталог [электронный ресурс]. – Режим доступа: http: //www.sensorica.ru/d7-3.shtml. 3. [электронный ресурс]. – Режим доступа: http: //www.chipinfo.ru/literature/compeljournal/2009/200913/p2.html. 4. [электронный ресурс]. – Режим доступа: http: //www.datasheetcatalog.org/datasheet/irf/iramx16up60a.pdf.
Проектирование систем управления двигателем постоянного тока Курсовая работа по дисциплине «АЭП НГО»
студентка гр. 8291 _____________ Е.А. Маликова (подпись)
руководитель _____________ С.В. Леонов (подпись)
Томск 2012г. Министерство образования Российской Федерации Государственное образовательное учреждение высшего профессионального образования «ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра_____________________
УТВЕРЖДАЮ: Зав. кафедрой____________(И.О.Ф.) (Подпись, дата)
ЗАДАНИЕ на выполнение курсовой работы
Студентке гр. 8291 Маликовой Екатерине Александровне
1Тема курсовой работы _______________________________________________________
(утверждена приказом ректора (распоряжением декана) от____№___
2 Срок сдачи студентом готовой работы_____________________
3 Исходные данные к работе
1. Нагрузочная диаграмма.
2. Исходные данные. Момент: М1=5Н*м М2=4Н*м М3=3Н*м М4=1Н*м М5=2Н*м Время: t1=10 сек. t2=13 сек. t3=7 сек. t4=11 сек. t5=19 сек. Угловая скорость: ω 1=88 рад/с ω 2=44 рад/с ω 3=22рад/с ω 4=11 рад/с ω 5=5.5 рад/с Температура: tº =20º C Напряжение питания: Uпит=220В Время переходного процесса: tпп=10% от интервала, т.е. Ошибка регулирования в установившемся режиме на больше 5%
Руководитель________________ (И.О.Ф.) (подпись, дата) Задание принял к исполнению ____________________________ (И.О.Ф.) (подпись, дата)
Содержание Введение. 6 1.1 Двигатель постоянного тока. 7 1.2 Выбор элементов, расчет параметров силовой части………………………8 1.3 Подбор силового драйвера. 12 1.4 Выбор датчиков тока и скорости. 13 1.5 Выбор микроконтроллера. 15 2.1 Выбор функциональной схемы системы управления двигателем постоянного тока 18 2.2 Синтез регуляторов методом модального оптимума. 19 2.3 Расчет контура тока. 20 2.4 Расчет контура скорости. 22 3.1 Моделирование процесса в пакете MatLab Simulink. 23 Заключение. 24 Список использованных источников. 25
Введение В данном курсовом проекте осуществляется подбор двигателя постоянного тока по определенным параметрам, заданным в варианте задания. Рассматриваются вопросы подбора схемы питания и выбора ее частей из линейки элементов, выпускаемых промышленностью; проектируется схема управления, в том числе: осуществляется выбор подходящего силового драйвера, МК, датчиков тока и скорости. По окончании расчетов системы электропривода будет произведено моделирование системы в пакете MatLab Simulink.
Двигатель постоянного тока. Двигатель постоянного тока — электромеханический преобразователь энергии электрической в механическую, работающий от сети постоянного тока и имеющий в составе щёточно-коллекторный узел.
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором. Принцип действия основан на взаимодействии основного магнитного поля главных полюсов, с магнитным полем якоря вращающегося внутри. Поле якоря образуется (рамки с током) протекающим по обмотке постоянным электрическим током, который в каждый момент в зависимости от положения якоря протекает по одной из фаз. Щеточно-коллекторный узел выполняет роль электромеханического преобразователя рода тока постоянного в переменный и коммутатора, подключая в текущий момент времени ту фазу обмотки якоря (катушку), который формирует максимальный электрический момент.
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 647; Нарушение авторского права страницы



 (1)
(1) - суммарная некомпенсируемая постоянная времени контура регулирования
- суммарная некомпенсируемая постоянная времени контура регулирования (2)
(2) (3)
(3) (4)
(4) (5)
(5) :
:  (6)
(6) (7)
(7) -
- ,
, 


 , где
, где , где
, где
 , где
, где - скорость холостого хода
- скорость холостого хода - момент пусковой
- момент пусковой .
. , таким образом
, таким образом  .
. , отсюда
, отсюда , отсюда
, отсюда




 (8)
(8) (9)
(9) (10)
(10)
 (11)
(11) :
: