|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
STM32 с нуля. Таймеры. Генерация ШИМ. ⇐ ПредыдущаяСтр 4 из 4
Posted on 19.01.2013 В прошлой статье (вот тут) мы рассмотрели в общих чертах таймеры в STM32 и написали простенькую программку. Теперь, как и обещал, поподробнее покопаем генерацию ШИМ при помощи все того же таймера TIM4. Итак… Честно говоря, писать то особо нечего) Думаю многие знают что такое ШИМ и с чем его едят, а если нет то об этом можно прочитать, например, в Википедии, так что нет, наверное, смысла отдельно описывать то, что уже многократно и хорошо описано =) Давайте писать пример для генерации ШИМ. Просто замутить такой сигнал не так интересно, так что давайте хоть немного усложним задачу. Будем генерировать ШИМ с разным заполнением в зависимости от состояния кнопки. Если кнопка нажата – генерируем сигнал с периодом 2.5 мс и заполнением 1.5 мс, а если кнопка не нажата – то период – 2.5 мс, заполнение – 0.5 мс. Ничего сложного ) Так что создаем новый проект и пишем код. Для начала набор includ’ов:
Добавили все файлы, необходимые нам для работы.
TIMER_PRESCALER мы уже упоминали — это предделитель частоты.
Просто переменные, которые нам понадобятся в проекте. Пока все понятно ) И вот наконец-то кое-что поинтереснее, а именно наша разросшаяся функция initAll ().
Давайте прямо по строчкам смотреть, что же тут написано. Ну, вначале уже привычное включение тактирования необходимой периферии. Шестую ножку порта GPIOB настраиваем на работу в режиме альтернативной функции(! ). Лезем в даташит на контроллер и видим, что альтернативной функцией у этого вывода является первый канал таймера TIM4. То что надо )
Вывод PA3 настраиваем на вход – там будет наша воображаемая кнопка. Почему именно третья ножка? Да фиг его знает, просто так ) Итак, с инициализацией портов закончили, идем настраивать таймер. Поначалу все конфигурируем, как и в предыдущем проекте. А вот дальше что-то новенькое:
Для использования режима генерации ШИМ нам понадобилась структура TIM_OCInitTypeDef. ПолеTIM_Pulse – длительность заполнения, пусть будет сначала 50 тиков (0.5 мс). Далее задаем режим — TIM_OCMode_PWM1. Помимо PWM1 есть еще PWM2. Это всего лишь разные режимы ШИМ – с выравниванием по границе и по центру. В поле TIM_OutputState забиваем – Enable и инициализируем таймер. Готово! Осталось немного )
Все, как и раньше – включаем прерывание по переполнению. Оно нам нужно, чтобы опрашивать кнопку именно в момент окончания периода ШИМ. Вот и сам код обработчика:
Опрашиваем кнопку, ничего нового, знакомая функция ) Возможно возникнет вопрос – зачем так извращаться «(button == 1) & & (buttonPreviousState == 0)»? А чтобы работа с регистром таймера шла не на каждое прерывание, а только когда состояние кнопки изменяется. Упомянутая работа с регистром заключается в прямой записи длительности заполнения в регистр таймера TIM_CCR. Компилируем, идем в отладчик, запускаем программу и эмулируем нажатие кнопки на PA3. Если кто забыл, открываем окно General Purpose I/O A (GPIOA) и вручную выставляем бит на входе PA3, то есть говорим контроллеру, что кнопка типа нажата, давай действуй =) В окошке логического анализатора видим:
15) ЦАП.
Цифро-аналоговый преобразователь (ЦАП) — устройство для преобразования цифрового (обычно двоичного) кода в аналоговый сигнал (ток, напряжение или заряд). Цифро-аналоговые преобразователи являются интерфейсом между дискретным цифровым миром и аналоговыми сигналами. Аналого-цифровой преобразователь (АЦП) производит обратную операцию. Звуковой ЦАП обычно получает на вход цифровой сигнал в импульсно-кодовой модуляции (англ. PCM, pulse-code modulation). Задача преобразования различных сжатых форматов в PCM выполняется соответствующими кодеками.
16) АЦП.
Аналого-цифровой преобразователь[1][2][3] (АЦП, англ. Analog-to-digital converter, ADC) — устройство, преобразующее входной аналоговый сигнал в дискретный код (цифровой сигнал). Обратное преобразование осуществляется при помощи цифро-аналогового преобразователя (ЦАП, DAC). Как правило, АЦП — электронное устройство, преобразующее напряжение в двоичный цифровой код. Тем не менее, некоторые неэлектронные устройства с цифровым выходом следует также относить к АЦП, например, некоторые типы преобразователей угол-код. Простейшим одноразрядным двоичным АЦП является компаратор.
17) ОЗУ.
Операти́ вная па́ мять (англ. Random Access Memory, RAM, память с произвольным доступом; ОЗУ (оперативное запоминающее устройство); комп. жарг. память, оперативка) — энергозависимая часть системы компьютерной памяти, в которой во время работы компьютера хранится выполняемый машинный код (программы), а также входные, выходные и промежуточные данные, обрабатываемые процессором. Обмен данными между процессором и оперативной памятью производится: · непосредственно; · через сверхбыструю память 0-го уровня — регистры в АЛУ, либо при наличии аппаратного кэша процессора — через кэш. Содержащиеся в современной полупроводниковой оперативной памяти данные доступны и сохраняются только тогда, когда на модули памяти подаётся напряжение. Выключение питания оперативной памяти, даже кратковременное, приводит к искажению либо полному разрушению хранимой информации.
18) ПЗУ. Постоя́ нное запомина́ ющее устро́ йство (ПЗУ) — энергонезависимая память, используется для хранения массива неизменяемых данных.
19) Инкрементальный энкодер. Энкодер это всего лишь цифровой датчик угла поворота, не более того. Энкодеры бывают абсолютные — сразу выдающие двоичный код угла и инкрементальные, дающие лишь указание на направление и частоту вращения, а контроллер, посчитав импульсы и зная число импульсов на оборот, сам определит положение. Импульсный (пошаговый) энкодеротносится к типу энкодеров, которые предназначены для указания направления движения и/или углового перемещения внешнего механизма. Пошаговый энкодер формирует импульсы, количество которых соответствует повороту вала на определенный угол. Этот тип энкодеров, в отличие от абсолютных, не формирует код положения вала, когда вал находится в покое. Пошаговый оптический энкодер состоит из следующих компонентов: источника света, диска с метками, фототранзисторной сборки и схемы обработки сигнала. Диск пошагового энкодера подразделен на точно позиционированные отметки. Количество отметок определяет количество импульсов за один оборот. К примеру, если диск поделен на 1000 меток, тогда за 250 импульсов вал должен повернуться на 90 градусов.
Диск с метками инкрементного энкодера
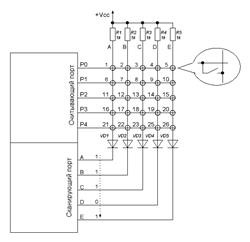
20) Матрица кнопок. Матричная клавиатура Начинающим 8 Сентябрь 2008 DI HALT 82 Comments Допустим нам надо подавать команды нашему девайсу. Проще всего это делать посредством обычных кнопок, повешенных на порт. Но одно дело когда кнопок две три, и другое когда их штук двадцать. Не убивать же ради этого двадцать выводов контроллера. Решение проблемы есть — матрицирование. То есть кнопки группируются в ряды и столбцы, а полученная матрица последовательно опрашивается микроконтроллером, что позволяет резко снизить количество нужных выводов ценой усложнения алгоритма опроса. Клавиатурная матрица. Считывающий порт включается в режиме Pull-up входа, то есть вход с подтягивающими резисторами. Если контроллер это не поддерживает, то эти резисторы надо повесить снаружи. Сканирующий порт работает в режиме выхода, он подключен к столбцам. Столбцы должны быть подтянуты резисторами к питанию. Впрочем, если используется полноценный Push-Pull то подтяжка не нужна — выход сам поднимет ногу на нужный уровень. Работает следующим образом.
В сканирующий порт выводится значение, состоящее из одного нуля и единицы на всех остальных выводах. Пусть, например, ноль будет на выводе А. Наличие нуля сразу же придавливает подтяжку и весь столбец ложится на землю. Теперь считываем сразу все значение из читающего порта. Если на столбце А не нажата ни одна кнопка, то в порту будут все единички. Но стоит нажать любую кнопку из столбца А, так она сразу же замкнет линию А, на этот вывод порта. В линии А у нас в данный момент 0, это обеспечивает ноль на сканирующем выводе контроллера. Поэтому и на соответствующем выводе порта будет 0 Потом число в сканирующем порту сдвигается на один бит влево (или вправо) и сканируется второй столбец и так по кругу. В итоге, зная какой столбец мы сканируем, получив ноль на считывающем порту, мы, как по координатам, поймем какая кнопка из матрицы нажата. Можно определить одновременные нажатия многих кнопок — надо просто делать проверку не по байту, а по конкретному биту. Увеличение разрядности Дешифратор, это такая микросхема, принимающая на вход двоичный код, а на выходе выдает единицу в выбранный разряд. Т.е. подали число «101» — получили «1» на выводе номер 5. Ну, а у инверсного дешифратора будет 0. Можно пойти еще дальше и поставить микросхему счетчик, который дергать импульсом с порта, значение со счетчика прогонять через дешифратор. Таким образом, можно влепить сколько угодно выводов, хватило бы разрядности дешифратора. Главное учитывать на каком такте счетчика у нас будет какой столбец. Если сканируется обычная клавиатура, нажимаемая человеком, то можно не заморачиваться на скорость опроса и сделать его в качестве побочного продукта, повесив на какое-нибудь левое прерывание. Достаточно чтобы клава опрашивалась хотя бы 10-20 раз в секунду. Этого уже достаточно, для комфортной работы. Дребезг контактов и борьба с ним. Но микроконтроллер работает с такой скоростью, что успевает посчитать эти всплески как устойчивые состояния. Решить эту проблему можно аппаратно, с помощью RS триггера, так и программно — внеся небольшую задержку перед следующим опросом кнопки. Задержка подбирается такой, чтобы дребезг успел прекратиться к ее окончанию. 21) Популярное:
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 1750; Нарушение авторского права страницы