|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Вращающееся магнитное поле в АМ ⇐ ПредыдущаяСтр 2 из 2
Конструкция АМ Асинхронная машина — это электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора. В ряде стран к асинхронным машинам причисляют также коллекторные машины. Второе название асинхронных машин — индукционные вследствие того, что ток в обмотке ротора индуцируется вращающимся полем статора. Асинхронные машины сегодня составляют большую часть электрических машин. В основном они применяются в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую. Асинхронная машина имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод (сердечник); все остальные части — конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п. Обмотка статора представляет собой трёхфазную (в общем случае — многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120 эл.град. Фазы обмотки статора соединяют по стандартным схемам «треугольник» или «звезда» и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения тока в обмотке статора, поэтому его набирают из пластин электротехнической стали для обеспечения минимальных магнитных потерь. Основным методом сборки магнитопровода в пакет является шихтовка. По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из пластин электротехнической стали.
Вращающееся магнитное поле в АМ Вращающееся магнитное поле Принцип получения вращающегося магнитного поля. В основе работы асинхронных двигателей лежит вращающееся магнитное поле, создаваемое МДС обмоток статора. Принцип получения вращающегося магнитного поля с помощью неподвижной системы проводников заключается в том, что если по системе неподвижных проводников, распределенных в пространстве по окружности, протекают токи, сдвинутые по фазе, то в пространстве создается вращающееся поле. Если система проводников симметрична, а угол сдвига фаз между токами соседних проводников одинаков, то амплитуда индукции вращающегося магнитного поля и скорость постоянны. Если окружность с проводниками развернуть на плоскость, то с помощью подобной системы можно получить «бегущее» поле. Вращающееся поле переменного тока трехфазной цепи. Рассмотрим получение вращающегося поля на примере трехфазного асинхронного двигателя с тремя обмотками, сдвинутыми по окружности на 120° (рис.3.5) и соединенными звездой. Пусть обмотки статора питаются симметричным трехфазным напряжением со сдвигом фаз напряжений и токов на 120°. Если для обмотки АХ принять начальную фазу тока равной нулю, тогда мгновенные значения токов имеют вид Графики токов представлены на рис. 3.6. Примем, что в каждой обмотке всего два провода, занимающие два диаметрально расположенные паза.
Рис. 3.5 Рис. 3.6 Как видно из рис. 3.6, в момент времени to ток в фазе А положительный, а в фазах В и С – отрицательный. Если ток положительный, то направление тока примем от начала к концу обмотки, что соответствует обозначению знаком «х» в начале обмотки и знаком « · » (точка) в конце обмотки. Пользуясь правилом правоходового винта, легко найти картину распределения магнитного поля для момента времени to (рис. 3.7, а). Ось результирующего магнитного поля с индукцией Втрез расположена горизонтально.
Рис. 3.7 На рис. 3.7, б показана картина магнитного поля в момент времени ti, соответствующий изменению фазы тока на угол
где Вт – максимальная индукция одной фазы; Вmрез – максимальная индукция трех фаз; Направление вращения поля. В рассмотренном случае направление вращения поля совпадает с направлением движения часовой стрелки. Если поменять местами выводы любых двух фаз питающего напряжения, например B и С , что соответствует обратной последовательности фаз, то направление вращения поля будет противоположным (против движения часовой стрелки), т. е. магнитное поле реверсируется (ср. рис. 3.8). Формула частоты вращения поля. Если число катушек в каждой фазе увеличить, а сдвиг фаз между токами сохранить в 120°, то частота вращения поля изменится. Например, при двух катушках в каждой фазе, расположенных, как показано на рис. 3.9, поле за один период повернется в пространстве на 180°.
Рис. 3.8 Рис. 3.9 Рис. 3.10 Для получения картины поля возьмем момент времени to, когда ток в фазе А положительный, а токи в фазах В и С отрицательные. Пользуясь правилом знаков для токов находим, что в данном случае число полюсов 2р = 4 или р = 2 и тогда n1 = 60f1 / p = 3000/2 =1500 об/мин. Рассуждая аналогично, для трех катушек в каждой фазе находим картину поля, показанную на рис.3.10. Здесь р = 3 и, следовательно, n1 = 1000 об/мин. Общая формула для определения частоты вращения, об/мин, будет n1 = 60 f1 / p (3.1) Во всех рассмотренных случаях катушки каждой фазы были соединены между собой последовательно. Именно при таком соединении частота вращения поля статора для р = 1, 2 и 3 при f 1 = 50 Гц составила соответственно 3000, 1500 и 1000 об/мин.
5.6. Преобразование энергии и к.п.д. АД. Потери мощности при работе. Преобразование энергии в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии. Эти потери делятся на механические, магнитные и электрические. Из сети в обмотку статора поступает мощность Р1. Часть этой мощности расходуется на покрытие магнитных потерь в сердечнике статора рс1, а также в обмотке статора на покрытие электрических потерь, обусловленных нагревом обмотки, рэ1 = m1I12r1. Оставшаяся часть мощности при помощи магнитного потока передается на ротор и поэтому называется электромагнитной мощностью Рэм = Р1 - (рc1 + рэ1). Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора рэ2 = m2I22r2 = m1I’22r’2. Остальная часть электромагнитной мощности преобразуется в механическую мощность двигателя, называемую полной механической мощностью Р’2 = Рэм - рэ2. Таким образом, полная механическая мощность Р’2 = m1I’22r’2[(1-s)/s] = рэ2[(1-s)/s]. Выполнив несложные преобразования, получим рэ2[(1-s)/s] = Рэм - рэ2 и рэ2= sРэм, т.е. мощность электрических потерь в роторе пропорциональна скольжению. Поэтому работа асинхронного двигателя более экономична при малых скольжениях. Следует отметить, что в роторе двигателя возникают также и магнитные потери, но ввиду небольшой частоты тока ротора (f2 = f1s) эти потери настолько малы, что ими обычно пренебрегают. Механическая мощность на валу двигателя Р2 меньше полной механической мощности Р’2 на величину механических рмех и добавочных рдпотерь Р2 = Р’2 - (рмех + рд). Механические потери в асинхронном двигателе обусловлены трением в подшипниках и трением вращающихся частей о воздух. Добавочные потери вызваны наличием в двигателе полей рассеяния и пульсацией поля в зубцах ротора и статора. Таким образом, полезная мощность асинхронного двигателя Р2 = Р1 - ∑ р, где ∑ р – сумма потерь в асинхронном двигателе, Коэффициент полезного действия асинхронного двигателя η = Р2/ Р1 = 1 - ∑ р/ Р1. Благодаря отсутствию коллектора КПД асинхронных двигателей выше, чем у двигателей постоянного тока. В зависимости от величины мощности асинхронных двигателей их КПД при номинальной нагрузке может быть в пределах от 83 до 95% (верхний предел соответствует двигателям большой мощности).
Рабочие характеристики АД.
Способы пуска в ход АД В момент пуска в ход n=0, т.е. скольжение S=1. Т.к. токи в обмотках ротора и статора зависят от скольжения и возрастают при его увеличении, пусковой ток двигателя в 5 ÷ 8 раз больше его номинального тока Iпуск=(5÷ 8)Iн. Как рассматривалось ранее, из-за большой частоты ЭДС ротора асинхронные двигатели имеют ограниченный пусковой момент Mпуск=(0, 8÷ 1, 8)Mн. Для пуска в ход двигателя необходимо, чтобы развиваемый им пусковой момент превышая момент нагрузки на валу. В зависимости от мощности источников питания и условий пуска используют разные способы пуска, которые преследуют цели: уменьшение пускового тока и увеличение пускового момента. Различают следующие способы пуска в ход асинхронных двигателей: прямое включение в цепь, пуск при пониженном напряжении, реостатный пуск, использование двигателей с улучшенными пусковыми свойствами. Прямое включение в сеть Это самый простой и самый дешевый способ пуска. На двигатель вручную или с помощью дистанционного управления подается номинальное напряжение. Прямое включение в сеть допускается, если мощность двигателя не превышает 5% от мощности трансформатора, если от него питается и осветительная сеть. Ограничение по мощности объясняется бросками тока в момент пуска, что приводит к снижению напряжения на зажимах вторичных обмоток трансформатора. Если от трансформатора не питается осветительная сеть, то прямое включение в сеть можно применять для двигателей, мощность которых не превышает 25% от мощности трансформатора. Изменение скольжения Этот способ используют в приводе тех механизмов, где установлены асинхронные двигатели с фазным ротором. Например, в приводе подъемно-транспортных машин. В цепь фазного ротора вводится регулировочный реостат. Увеличение активного сопротивления ротора не влияет на величину критического момента, но увеличивает критическое скольжение (рис. 2.21). На рис. 2.21 приведены механические характеристики асинхронного двигателя при разных сопротивлениях регулировочного реостата Rр3> Rр2> 0, Rр1=0.
Рис. 2.21 Как следует из рис. 2.21 при этом способе можно получить большой диапазон регулирования частоты вращения в сторону понижения. Основные недостатки этого способа: 1. Из-за больших потерь на регулировочном реостате снижается коэффициент полезного действия, т.е. способ неэкономичный. 2. Механическая характеристика асинхронного двигателя с увеличением активного сопротивления ротора становится мягче, т.е. снижается устойчивость работы двигателя. 3. Невозможно плавно регулировать частоту вращения. Из-за перечисленных недостатков этот способ применяют для кратковременного снижения частоты вращения. Изменение числа пар полюсов Эти двигатели (многоскоростные) имеют более сложную обмотку статора, позволяющую изменять ее число пар полюсов, и короткозамкнутый ротор. При работе асинхронного двигателя необходимо, чтобы обмотки ротора и статора имели одинаковое число пар полюсов. Только короткозамкнутый ротор способен автоматически приобретать то же число пар полюсов, что и поле статора. Многоскоростные двигатели нашли широкое применение в приводе металлорежущих станков. Нашли применение двух, трех и четырех скоростные двигатели. На рис. 2.22 показана схема соединения и магнитное поле статора двигателя при последовательном (б) и параллельном (а) соединении полуобмоток.
Рис. 2.22 У двухскоростного двигателя обмотка каждой фазы состоит из двух полуобмоток. Включая их последовательно или параллельно можно в 2 раза изменять число пар полюсов. У четырехскоростного двигателя на статоре должно размещаться две независимые обмотки с разным числом пар полюсов. Каждая из обмоток позволяет в два раза изменять число пар полюсов. Например, у двигателя, работающего от сети c частотой f=50 Гц, со следующими частотами вращения 3000/1500/1000/500 [об/мин] с помощью одной из обмоток статора можно получить частоту вращения 3000 об/мин и 1500 об/мин (при этом p=1 и p=2). С помощью другой из обмоток можно получить частоту вращения 1000 об/мин и 500 об/мин (при этом p=3 и p=6). При переключении числа пар полюсов изменяется и магнитный поток в зазоре, что приводит к изменению критического момента Mкр (рис. 2.23.б). Если при изменении числа пар полюсов одновременно изменять и подведенное напряжение, то критический момент может остаться неизменным (рис. 2.23.а). Поэтому при этом способе регулирования могут быть получены два вида семейства механических характеристик (рис. 2.23). Достоинства этого способа регулирования: сохранение жесткости механических характеристик, высокий К.П.Д. Недостатки: ступенчатое регулирование, большие габариты и большая стоимость двигателя.
Рис. 2.23 Конструкция АМ Асинхронная машина — это электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора. В ряде стран к асинхронным машинам причисляют также коллекторные машины. Второе название асинхронных машин — индукционные вследствие того, что ток в обмотке ротора индуцируется вращающимся полем статора. Асинхронные машины сегодня составляют большую часть электрических машин. В основном они применяются в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую. Асинхронная машина имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод (сердечник); все остальные части — конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п. Обмотка статора представляет собой трёхфазную (в общем случае — многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120 эл.град. Фазы обмотки статора соединяют по стандартным схемам «треугольник» или «звезда» и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения тока в обмотке статора, поэтому его набирают из пластин электротехнической стали для обеспечения минимальных магнитных потерь. Основным методом сборки магнитопровода в пакет является шихтовка. По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из пластин электротехнической стали.
Вращающееся магнитное поле в АМ Вращающееся магнитное поле Принцип получения вращающегося магнитного поля. В основе работы асинхронных двигателей лежит вращающееся магнитное поле, создаваемое МДС обмоток статора. Принцип получения вращающегося магнитного поля с помощью неподвижной системы проводников заключается в том, что если по системе неподвижных проводников, распределенных в пространстве по окружности, протекают токи, сдвинутые по фазе, то в пространстве создается вращающееся поле. Если система проводников симметрична, а угол сдвига фаз между токами соседних проводников одинаков, то амплитуда индукции вращающегося магнитного поля и скорость постоянны. Если окружность с проводниками развернуть на плоскость, то с помощью подобной системы можно получить «бегущее» поле. Вращающееся поле переменного тока трехфазной цепи. Рассмотрим получение вращающегося поля на примере трехфазного асинхронного двигателя с тремя обмотками, сдвинутыми по окружности на 120° (рис.3.5) и соединенными звездой. Пусть обмотки статора питаются симметричным трехфазным напряжением со сдвигом фаз напряжений и токов на 120°. Если для обмотки АХ принять начальную фазу тока равной нулю, тогда мгновенные значения токов имеют вид Графики токов представлены на рис. 3.6. Примем, что в каждой обмотке всего два провода, занимающие два диаметрально расположенные паза.
Рис. 3.5 Рис. 3.6 Как видно из рис. 3.6, в момент времени to ток в фазе А положительный, а в фазах В и С – отрицательный. Если ток положительный, то направление тока примем от начала к концу обмотки, что соответствует обозначению знаком «х» в начале обмотки и знаком « · » (точка) в конце обмотки. Пользуясь правилом правоходового винта, легко найти картину распределения магнитного поля для момента времени to (рис. 3.7, а). Ось результирующего магнитного поля с индукцией Втрез расположена горизонтально.
Рис. 3.7 На рис. 3.7, б показана картина магнитного поля в момент времени ti, соответствующий изменению фазы тока на угол
где Вт – максимальная индукция одной фазы; Вmрез – максимальная индукция трех фаз; Направление вращения поля. В рассмотренном случае направление вращения поля совпадает с направлением движения часовой стрелки. Если поменять местами выводы любых двух фаз питающего напряжения, например B и С , что соответствует обратной последовательности фаз, то направление вращения поля будет противоположным (против движения часовой стрелки), т. е. магнитное поле реверсируется (ср. рис. 3.8). Формула частоты вращения поля. Если число катушек в каждой фазе увеличить, а сдвиг фаз между токами сохранить в 120°, то частота вращения поля изменится. Например, при двух катушках в каждой фазе, расположенных, как показано на рис. 3.9, поле за один период повернется в пространстве на 180°.
Рис. 3.8 Рис. 3.9 Рис. 3.10 Для получения картины поля возьмем момент времени to, когда ток в фазе А положительный, а токи в фазах В и С отрицательные. Пользуясь правилом знаков для токов находим, что в данном случае число полюсов 2р = 4 или р = 2 и тогда n1 = 60f1 / p = 3000/2 =1500 об/мин. Рассуждая аналогично, для трех катушек в каждой фазе находим картину поля, показанную на рис.3.10. Здесь р = 3 и, следовательно, n1 = 1000 об/мин. Общая формула для определения частоты вращения, об/мин, будет n1 = 60 f1 / p (3.1) Во всех рассмотренных случаях катушки каждой фазы были соединены между собой последовательно. Именно при таком соединении частота вращения поля статора для р = 1, 2 и 3 при f 1 = 50 Гц составила соответственно 3000, 1500 и 1000 об/мин.
5.6. Преобразование энергии и к.п.д. АД. Потери мощности при работе. Преобразование энергии в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии. Эти потери делятся на механические, магнитные и электрические. Из сети в обмотку статора поступает мощность Р1. Часть этой мощности расходуется на покрытие магнитных потерь в сердечнике статора рс1, а также в обмотке статора на покрытие электрических потерь, обусловленных нагревом обмотки, рэ1 = m1I12r1. Оставшаяся часть мощности при помощи магнитного потока передается на ротор и поэтому называется электромагнитной мощностью Рэм = Р1 - (рc1 + рэ1). Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора рэ2 = m2I22r2 = m1I’22r’2. Остальная часть электромагнитной мощности преобразуется в механическую мощность двигателя, называемую полной механической мощностью Р’2 = Рэм - рэ2. Таким образом, полная механическая мощность Р’2 = m1I’22r’2[(1-s)/s] = рэ2[(1-s)/s]. Выполнив несложные преобразования, получим рэ2[(1-s)/s] = Рэм - рэ2 и рэ2= sРэм, т.е. мощность электрических потерь в роторе пропорциональна скольжению. Поэтому работа асинхронного двигателя более экономична при малых скольжениях. Следует отметить, что в роторе двигателя возникают также и магнитные потери, но ввиду небольшой частоты тока ротора (f2 = f1s) эти потери настолько малы, что ими обычно пренебрегают. Механическая мощность на валу двигателя Р2 меньше полной механической мощности Р’2 на величину механических рмех и добавочных рдпотерь Р2 = Р’2 - (рмех + рд). Механические потери в асинхронном двигателе обусловлены трением в подшипниках и трением вращающихся частей о воздух. Добавочные потери вызваны наличием в двигателе полей рассеяния и пульсацией поля в зубцах ротора и статора. Таким образом, полезная мощность асинхронного двигателя Р2 = Р1 - ∑ р, где ∑ р – сумма потерь в асинхронном двигателе, Коэффициент полезного действия асинхронного двигателя η = Р2/ Р1 = 1 - ∑ р/ Р1. Благодаря отсутствию коллектора КПД асинхронных двигателей выше, чем у двигателей постоянного тока. В зависимости от величины мощности асинхронных двигателей их КПД при номинальной нагрузке может быть в пределах от 83 до 95% (верхний предел соответствует двигателям большой мощности).
Популярное:
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 1396; Нарушение авторского права страницы






 = 60°. В этот момент времени токи в фазах А и В положительные, т. е. ток идет в них от начала к концу, а ток в фазе С – отрицательный, т. е. идет от конца к началу. Магнитное поле оказывается повернутым по часовой стрелке на угол
= 60°. В этот момент времени токи в фазах А и В положительные, т. е. ток идет в них от начала к концу, а ток в фазе С – отрицательный, т. е. идет от конца к началу. Магнитное поле оказывается повернутым по часовой стрелке на угол  = 60°. Если угловая частота тока
= 60°. Если угловая частота тока  , то
, то  . (Здесь
. (Здесь  , где
, где  – частота тока в сети). В моменты времени t2 и t3 ось магнитного поля соответственно повернется на углы
– частота тока в сети). В моменты времени t2 и t3 ось магнитного поля соответственно повернется на углы  и
и  (рис. 3.6, в и г). Через время, равное периоду Т , ось поля займет первоначальное положение. Следовательно, за период Т поле делает один оборот (рис. 3.7, д) (
(рис. 3.6, в и г). Через время, равное периоду Т , ось поля займет первоначальное положение. Следовательно, за период Т поле делает один оборот (рис. 3.7, д) (  (
(  )). В рассмотренном случае число полюсов 2р = 2 и магнитное поле вращается с частотой n1=60f1=60∙ 50=3000 об / мин ( f1=50 Гц – промышленная частота). Можно доказать, что результирующая магнитная индукция представляет собой вращающееся поле с амплитудой
)). В рассмотренном случае число полюсов 2р = 2 и магнитное поле вращается с частотой n1=60f1=60∙ 50=3000 об / мин ( f1=50 Гц – промышленная частота). Можно доказать, что результирующая магнитная индукция представляет собой вращающееся поле с амплитудой
 – угол между горизонтальной осью и прямой, соединяющей центр с произвольной точкой между статором и ротором.
– угол между горизонтальной осью и прямой, соединяющей центр с произвольной точкой между статором и ротором.
 3. Принцип работы АД
3. Принцип работы АД 

 4. Скольжение и режимы работы АМ
4. Скольжение и режимы работы АМ 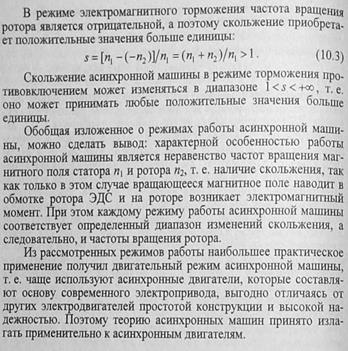
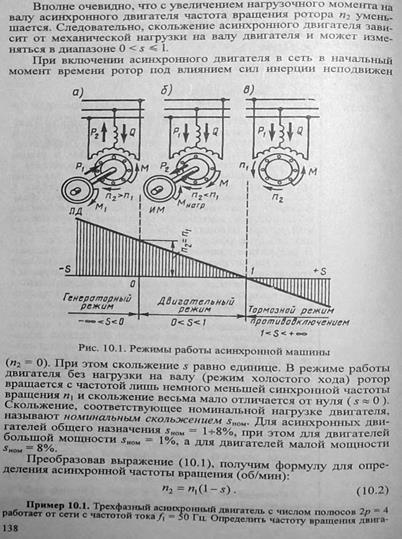
 7.8. Уравнение напряжений и токов в фазах АД. Действующие значения ЭДС, индуцируемые в фазах статора и ротора.
7.8. Уравнение напряжений и токов в фазах АД. Действующие значения ЭДС, индуцируемые в фазах статора и ротора. 

 9. Схема замещения АД и ее сопротивления
9. Схема замещения АД и ее сопротивления