
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
В замкнутой системе геометрическая сумма импульсов тел остается постоянной при любых взаимодействиях тел этой системы между собой.Стр 1 из 8Следующая ⇒
Первый закон Ньютона. Тело сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не выведет его из этого состояния. Первый закон Ньютона утверждает существование инерциальных систем отсчета. Второй закон Ньютона.
Скорость изменения импульса тела равна действующей на него силе.
Если масса тела постоянна, то верна формула: Под F мы понимаем результирующую всех сил, действующих на тело. Сумма сил, действующих на тело, сообщает ему ускорение
В частном случае, если сумма сил равна нулю, получаем первый закон Ньютона. Третий закон Ньютона. Если тело A действует на тело D с силой F, то тело D действует на тело A с силой равной по величине и обратной по направлению силе F. Силы приложены к разным телам.
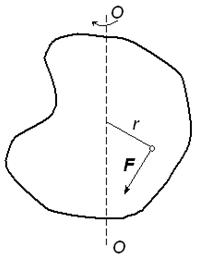
3 билет Кинематика вращательного движения При описании вращательного движения твердого тела относительно неподвижной в данной системе отсчета принято использовать векторные величины особого рода. В отличие от рассмотренных выше полярных векторов r (радиус-вектор), v (скорость), a (ускорение), направление которых естественным образом вытекает из природы самих величин, направление векторов, характеризующих вращательное движение, совпадает с осью вращения, поэтому их называют аксиальными (лат. axis – ось). Элементарный поворот dφ – аксиальный вектор, модуль которого равен углу поворота dφ, а направление вдоль оси вращения ОО' (см. рис. 1.4) определяется правилом правого винта.
Линейное перемещение dr произвольной точки А твердого тела связано с радиусом-вектором r и поворотом dφ соотношением dr=rsinα •dφ или в векторном виде через векторное произведение: dr=[dφ, r] (1.9) Соотношение (1.9) справедливо именно для бесконечно малого поворота dφ. Угловая скорость ω – аксиальный вектор, определяемый производной вектора поворота по времени: ω =dφ /dt=φ ' Вектор ω, как и вектор dφ, направлен вдоль оси вращения по правилу правого винта (рис.1.5).
Угловое ускорение β – аксиальный вектор, определяемый производной вектора угловой скорости по времени: β =dω /dt=d2φ /dt2=ω '=φ '' При ускоренном движении вектор β по направлению совпадает с ω (рис. 1.6, а), а при замедленном - векторы β и ω направлены противоположно друг другу (рис. 1.6, б).
Важное замечание: решение всех задач на вращение твердого тела вокруг неподвижной оси по форме аналогично задачам на прямолинейное движение точки. Достаточно заменить линейные величины x, vx, ax на соответствующие им угловые φ, ω и β, и мы получим уравнения, аналогичные (1.6) -(1.8).
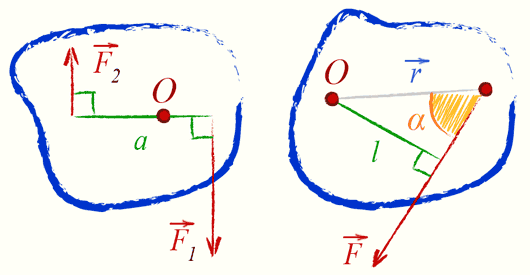
4 билет. Основной закон динамики вращательного движения: Основной закон динамики вращательного движения можно получить из второго закона Ньютона для поступательного движения твердого тела где F – сила, приложенная к телу массой m; а – линейное ускорение тела. Если к твердому телу массой m в точке А (рис. 5) приложить силу F, то в результате жесткой связи между всеми материальными точками тела все они получат угловое ускорение где где mi – масса i-й точки; Умножая левую и правую части уравнения (1.7) на ri, получают где Плечом силы называют кратчайшее расстояние от оси вращения “ОО” (рис. 5) до линии действия силы
Рис. 5. Твердое тело, вращающееся под действием силы F около оси “ОО”
Выражение (1.8) можно записать так: Просуммируем левую и правую части (1.9) по всем точкам тела: Обозначим Уравнение (1.10) – основной закон динамики вращательного движения твердого тела. Величина Мгновенное значение углового ускорения где Если в выражение основного закона (1.10) поставить значение мгновенного ускорения (1.11), то где Поэтому основной закон динамики вращательного движения твердого тела формулируется так: “Импульс момента силы
5 билет Момент силы. Момент инерции. Момент импульса. : Сила приложенная к твердому телу, которое может вращаться вокруг некоторой точки, создает момент силы. Действие момента силы аналогично действию пары сил.
Момент силы относительно некоторой точки — это векторное произведение силы на кратчайшее расстояние от этой точки до линии действия силы. Единица СИ момента силы:
Если:
или в виде векторного произведения
Момент силы — аксиальный вектор. Он направлен вдоль оси вращения. Направление вектора момента силы определяется правилом буравчика, а величина его равна M. Момент инерции материальной точки относительно оси вращения - произведение массы этой точки на квадрат расстояния от оси. При заданной массе тела момент инерции зависит как от распределения этой массы по объему тела, так и от положения и направления оси вращения. Момент инерции твердого тела - это велина, характеризующая распределение массы в теле и являющаяся мерой инертности тела при вращательном движении. Формула момента инерции:
Единица момента инерции - килограмм-метр в квадрате. Теорема Штейнера: Момент инерции тела относительно какой-либо оси равен моменту инерции относительно параллельной оси, проходящей через центр инерции, сложенной с величиной m*(R*R), где R - расстояние между осями.
Угловое ускорение, которое тело приобретает под действием момента сил, прямо пропорционально результирующему моменту всех внешних сил, приложенных к телу, и обратно пропорциональна моменту инерции тела относительно некоторой оси. Моме́ нт и́ мпульса ( кинетический момент, угловой момент, орбитальный момент, момент количества движения ) характеризует количество вращательного движения. Величина, зависящая от того, сколько массы вращается, как она распределена относительно оси вращения и с какойскоростью происходит вращение. Следует учесть, что вращение здесь понимается в широком смысле, не только как регулярное вращение вокруг оси. Например, даже при прямолинейном движении тела мимо произвольной воображаемой точки, не лежащей на линии движения, оно также обладает моментом импульса. Наибольшую, пожалуй, роль момент импульса играет при описании собственно вращательного движения. Однако крайне важен и для гораздо более широкого класса задач (особенно — если в задаче есть центральная или осевая симметрия, но не только в этих случаях). Определение Момент импульса
где Для нескольких частиц момент импульса определяется как (векторная) сумма таких членов:
где (В пределе количество частиц может быть бесконечным, например, в случае твердого тела с непрерывно распределенной массой или вообще распределенной системы это может быть записано как В системе СИ момент импульса измеряется в единицах джоуль-секунда; Дж·с. Из определения момента импульса следует его аддитивность: как, для системы частиц в частности, так и для системы, состоящей из нескольких подсистем, выполняется:
6 билет Закон сохранения импульса. Закон сохранения момента импульса: обозначим скорости тел массами m1 и m2 до взаимодействия через По третьему закону Ньютона силы, действующие на тела при их взаимодействии, равны по модулю и противоположны по направлению; поэтому их можно обозначить Для изменений импульсов тел при их взаимодействии на основании равенства (16.2) можно записать
где t — время взаимодействия тел. Из этих выражений получаем
Таким образом, векторная сумма импульсов двух тел до взаимодействия равна векторной сумме их импульсов после взаимодействия. Экспериментальные исследования взаимодействий различных тел — от планет и звезд до атомов и элементарных частиц — показали, что в любой системе взаимодействующих между собой тел при отсутствии действия сил со стороны других тел, не входящих в систему, или равенстве нулю суммы действующих сил геометрическая сумма импульсов тел остается неизменной. Система тел, не взаимодействующих с другими телами, не входящими в эту систему, называется замкнутой системой. Соотношение Эйнштейна Энергия, импульс и масса. Для свободной частицы E2 = p2c2 + m2c4. При изменении массы тела на Dm выделяется эквивалентная энергия DE = Dmc2. Преобразования Лоренца Пусть нам даны две системы отсчета k и k`. В момент t = О обе эти системы координат совпадают. Пусть система k` (назовем ее подвижной) движется так, что ось х` скользит по оси х, ось у` параллельна оси у, скорость v - скорость движения этой системы координат (рис. 109). Точка М имеет координаты в системе k - х, у, z, a в системе k` - х`, у`, z`. Преобразования Галилея в классической механике имеют вид:
Преобразования координат, удовлетворяющие постулатам специальной теории относительности, называются преобразованиями Лоренца.
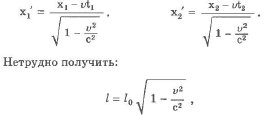
Впервые они (в несколько иной форме) были предложены Лоренцем для объяснения отрицательного эксперимента Майкельсона-Морли и для придания уравнениям Максвелла одинакового вида во всех инерциальных системах отсчета. Эйнштейн вывел их независимо на основе своей теории относительности. Подчеркнем, что изменилась (по сравнению с преобразованием Галилея) не только формула преобразования координаты х, но и формула преобразований времени t. Из последней формулы непосредственно видно, как переплетены пространственная и временная координаты. Следствия из преобразований Лоренца Длина движущегося стержня. Предположим, что стержень расположен вдоль оси х` в системе k` и движется вместе с системой k` со скоростью v. Разность между координатами конца и начала отрезка в системе отсчета, в которой он неподвижен, называется собственной длиной отрезка. В нашем случае l0 = х2` - х1`, где х2` - координата конца отрезка в системе k` и х/ - координата начала. Относительно системы k стержень движется. Длиной движущегося стержня принимают разность между координатами конца и начала стержня в один и тот же момент времени по часам системы k.
где l - длина движущегося стержня, l0 - собственная длина стержня. Длина движущегося стержня меньше собственной длины. Темп хода движущихся часов. Пусть в точке х0` движущейся системы координат k` происходит последовательно два события в моменты t/ и t2. В неподвижной системе координат k эти события происходят в разных точках в моменты t1 и t2. Интервал времени между этими событиями в движущейся системе координат равен дельта t` = t2` - t1`, а в покоящейся дельта t = t2 - t1. На основании преобразования Лоренца получим:
Интервал времени дельта t` между событиями, измеренный движущимися часами, меньше, чем интервал времени дельта t между теми же событиями, измеренный покоящимися часами. Это означает, что темп хода движущихся часов замедлен относительно неподвижных. Время, которое измеряется по часам, связанным с движущейся точкой, называетсясобственным временем этой точки. Относительность одновременности. Из преобразований Лоренца следует, что если в системе k в точке с координатами x1 и х2происходили два события одновременно (t1 = t2 = t0), то в системе k` интервал
понятие одновременности - понятие относительное. События, одновременные в одной системе координат, оказались неодновременными в другой. Относительность одновременности и причинность. Из относительности одновременности следует, что последовательность одних и тех же событий в различных системах координат различна. Не может ли случиться так, что в одной системе координат причина предшествует следствию, а в другой, наоборот, следствие предшествует причине? Чтобы причинно-следственная связь между событиями имела объективный характер и не зависела от системы координат, в которой она рассматривается, необходимо, чтобы никакие материальные воздействия, осуществляющие физическую связь событий, происходящих в различных точках, не могли передаваться со скоростью, большей скорости света. Таким образом, передача физического влияния из одной точки в другую не может происходить со скоростью, большей скорости света. При этом условии причинная связь событий носит абсолютный характер: не существует системы координат, в которой причина и следствие меняются местами.
13 билет. Элементы релятивности динамики. С новыми пространственно-временными представлениями не согласуются при больших скоростях движения и законы механики Ньютона. Лишь при малых скоростях движения, когда справедливы классические представления о пространстве и времени, второй закон Ньютона (уравнение движения)
не меняет своей формы при переходе от одной инерциальной системы отсчета к другой (выполняется принцип относительности). Но при больших скоростях движения этот закон в своей обычной (классической) форме несправедлив. Однако введенные в динамике основные понятия: энергия, импульс — имеют тот же физический смысл, лишь понятие массы в классической механике отличается от понятия массы в релятивистской динамике. В природе существуют частицы, скорость которых равна скорости света. Это фотоны и различного типа нейтрино. Масса этих частиц равна нулю. Они не могут быть замедлены или ускорены. Поэтому во всех инерциальных системах отсчета их импульс и энергия не равны нулю. Такие частицы называются безмассовыми. Энергия и импульс таких частиц связаны соотношениями Е = рс и Е2 -р2с2 = 0. (9.5) Эти соотношения экспериментально подтверждены. Однако для большинства частиц масса является одной из важнейших характеристик. Эти частицы называются массовыми. Скорость таких частиц Массовая частица обладает собственной энергией: Е = mс2. (9.6) Согласно этой формуле тело обладает энергией и при скорости, равной нулю — энергией покоя. Это замечательный результат. Любое тело уже только благодаря факту своего существования обладает энергией, которая пропорциональна его массе m. Во всех инерциальных системах отсчета импульс частицы и ее энергия связаны соотношением: Е2 - р2с2 = m2с4 (9.7) Так как величины m и с не меняются при переходе от одной системы отсчета к другой, то, следовательно, не меняется и значение Е2 - р2с2. Выражение (9.7) преобразуется в уравнение (9.5) при m = 0, следовательно, оно справедливо также и для безмассовых частиц. Формула (9.7) является фундаментальным соотношением релятивистской механики. Энергия частицы выражается через ее импульс следующим образом:
Используя формулу (9.8), а также учитывая, что импульс частицы пропорционален ее скорости и энергии, получаем выражения для импульса и энергии частицы:
Последнее слагаемое — это выражение для кинетической энергии в классической механике. Первое слагаемое в формуле (9.11) — это собственная энергия частицы. Релятивистская энергия есть сумма собственной энергии частицы и релятивистской кинетической энергии Ек: Е = mс2 + Ек. (9.12) Из уравнений (9.10) и (9.12) получим выражение для релятивистской кинетической энергии массовой частицы
Принцип соответствия. Законы динамики Ньютона и классические представления о пространстве и времени можно рассматривать как частный случай релятивистских законов при скоростях движения, много меньших скорости света. Это проявление так называемого принципа соответствия, согласно которому любая теория, претендующая на более глубокое описание явлений и на более широкую сферу применимости, чем старая, должна включать последнюю как предельный случай. Принцип соответствия впервые был сформулирован Нильсом Бором применительно к связи квантовой и классической теорий. Импульс частицы и ее энергия зависят от выбора систе мы отсчета, масса же всегда остается постоянной. При скоростях много меньших скорости света релятивистские выражения для импульса и энергии переходят в выражснгия классической механики (принцип соответствия).
14 билет: Зако́ н Куло́ на — это закон, описывающий силы взаимодействия между точечными электрическими зарядами. Был открыт Шарлем Кулоном в 1785 г. Проведя большое количество опытов с металлическими шариками, Шарль Кулон дал такую формулировку закона: Модуль силы взаимодействия двух точечных зарядов в вакууме прямо пропорционален произведению модулей этих зарядов и обратно пропорционален квадрату расстояния между ними Иначе: Два точечных заряда в вакууме действуют друг на друга с силами, которые пропорциональны произведению модулей этих зарядов, обратно пропорциональны квадрату расстояния между ними и направлены вдоль прямой, соединяющей эти заряды. Эти силы называются электростатическими (кулоновскими). Важно отметить, что для того, чтобы закон был верен, необходимы: точечность зарядов — то есть расстояние между заряженными телами много больше их размеров — впрочем, можно доказать, что сила взаимодействия двух объёмно распределённых зарядов со сферически симметричными непересекающимися пространственными распределениями равна силе взаимодействия двух эквивалентных точечных зарядов, размещённых в центрах сферической симметрии; их неподвижность. Иначе вступают в силу дополнительные эффекты: магнитное поле движущегося заряда и соответствующая ему дополнительная сила Лоренца, действующая на другой движущийся заряд; взаимодействие в вакууме. Однако с некоторыми корректировками закон справедлив также для взаимодействий зарядов в среде и для движущихся зарядов.[1] В векторном виде в формулировке Ш. Кулона закон записывается следующим образом:
где Напряженность электростатического поля - это силовая характеристика электростатического поля, численно равная силе, действующей на единичный положительный заряд. Напряженность электростатического поля - векторная величина. Напряженность электрического поля: E = F/Qпробный Напряженность электростатического поля (точечного заряда):
где r - расстояние от заряда Q, создающего поле, до точки поля, в которой определяется напряженность. Единица напряженности - вольт на метр (В/м) Электростатическое поле представляется графически силовыми линиями или линиями напряженности. Принцип суперпозиции полей, также называемый принципом наложения, является условностью. Согласно которой некоторый сложный процесс взаимодействия между определённым числом объектов можно представить в виде суммы взаимодействий между отдельными объектами. Принцип суперпозиции применим лишь к тем системам, которые описываются линейными уравнениями. К примеру, электромагнитная волна распространяется в вакууме. Свойства вакуума не меняются при воздействии на него волны. И все эффекты, которые возникают при распространении этой волны, в случае если она негармоническая можно представить в виде суммы эффектов создаваемых отдельными гармониками. Этот же принцип применим и к полю создаваемому скоплением зарядов. Суммарное поле можно разделить на отдельные поля, которые создаются каждым зарядом в отдельности. И наоборот общее поле будет состоять из суммы полей отдельных зарядов. Графически принцип суперпозиции полей можно представить в виде геометрической суммы векторов силы, которые действуют на пробный заряд, помещённый в поле точечных электрических зарядов.
Рисунок 1 — графическое представление принципа суперпозиции
Если поле создано простейшей совокупностью зарядов. Которая состоит из положительного и отрицательного зарядом находящихся на некотором расстоянии друг от друга. То результирующее поле в точке наблюдения находится, с помощью правила параллелограмма.
Рисунок 2 — иллюстрация к правилу параллелограмма
В случае если поле создается заряженным телом, имеющим протяжённые линейные размеры. То его необходимо мысленно разбить на небольшие участки, действие которых можно считать аналогичным действию точечных зарядов. И провести геометрическое суммирование полей этих отдельных участков. Таким образом, применив принцип суперпозиции полей к массивному телу. Принцип суперпозиции не является фундаментальным законом или постулатом. Он всего лишь вытекает из других принципов, например в электростатике основой для принципа суперпозиции являются уравнения Максвелла. Так как они линейны для вакуума это и дает основу для применения этого принципа. Но скажем если рассматривать в качестве среды не вакуум. А скажем ферромагнетик, то линейность в данной среде отсутствует. Так как намагниченность ферромагнетика определяется кривой намагниченности. Которая конечно и имеет некоторый участок обладающий линейностью, но в целом имеет и участок насыщения с резко выраженной нелинейностью. И принцип суперпозиции в данном случае не применим. Также нельзя применять принцип суперпозиции и к взаимодействию атомов и молекул между собой. Например, если взять два атома, у которых электроны находятся во взаимодействии. И поднести к ним третий такой же атом. Часть электронов от первых двух атомов притянется и вступит во взаимодействие с третьим атомом. То есть первоначальное распределение энергии в системе измениться. Изначальная сила взаимодействия между электронами и ядрами первых двух атомов уменьшится. То есть третий атом влияет не только на электроны, но и на ядра атомов.
15 билет. Поток вектора напряженности электростатического поля. : Число линий вектора E, пронизывающих некоторую поверхность S, называется потоком вектора напряженности NE.
Для вычисления потока вектора E необходимо разбить площадь S на элементарные площадки dS, в пределах которых поле будет однородным (рис.13.4).
Поток напряженности через такую элементарную площадку будет равен по определению(рис.13.5).
где
Так как
где графическое изображение электрического поля. Метод графического изображения электрического поля был предложен английским физиком Майклом Фарадеем. Суть метода заключается в том, что на чертеже изображаются непрерывные линии, которые называют линиями напряженности, или силовыми линиями. Правило построения линий напряженности заключается в том, что касательные к ним в каждой точке чертежа совпадают с направлением вектора напряженности поля в изображаемой точке. Таким образом, силовые линии имеют то же направление, что и напряжённость поля и не пересекаются, так как в каждой точке электрического поля вектор E имеет лишь одно направление. С помощью силовых линий можно дать количественную характеристику напряжённости электрического поля. Для этого густота, или плотность, силовых линий выбирается пропорционально модулю вектора напряженности. Плотность силовых линий определяется как число линий, пронизывающих единичную поверхность в направлении, перпендикулярном к этой поверхности. Изображение силовых линий позволяет получать картину поля, которая наглядно показывает, чему равна напряженность в разных частях поля и как она изменяется в пространстве
16 билет. Теорема Острогадского-Гаусса для электрического поля. Общая формулировка: Поток вектора напряжённости электрического поля через любую произвольно выбранную замкнутую поверхность пропорционален заключённому внутри этой поверхности электрическому заряду.
где
Данное выражение представляет собой теорему Гаусса в интегральной форме. Замечание: поток вектора напряжённости через поверхность не зависит от распределения заряда (расположения зарядов) внутри поверхности.
Здесь Теорема Гаусса может быть доказана как теорема в электростатике исходя из закона Кулона (см. ниже). Формула однако также верна в электродинамике, хотя в ней она чаще всего не выступает в качестве доказываемой теоремы, а выступает в качестве постулируемого уравнения (в этом смысле и контексте ее логичнее называть законом Гаусса[2].
17 билет: Потенциальная энергия. Потенциал. работа не зависит от пути, по которому перемещался в электростатическом поле пробный заряд
Перенесем пробный заряд на бесконечность. Напряженность поля Е на бесконечности принимается равной нулю, следовательно
Электромагнитный потенциал — четырёхмерная величина (4-вектор), характеризующая электромагнитное поле. Играет фундаментальную роль как в классической, так и в квантовой электродинамике. Электромагнитный потенциал можно представить состоящим из потенциалов электромагнитного поля φ и A, рассматриваемых в традиционной трехмерной формулировке электродинамики как отдельные величины, определяющие вместе электромагнитное поле: скалярного (в трёхмерном смысле) потенциала φ , вместе с A определяющего электрическое поле; |
Последнее изменение этой страницы: 2017-03-14; Просмотров: 1477; Нарушение авторского права страницы
 - импульс тела.
- импульс тела.

 .
.



 , (1.6)
, (1.6) и соответственные линейные ускорения, как если бы на каждую точку действовала сила
и соответственные линейные ускорения, как если бы на каждую точку действовала сила  . Для каждой материальной точки можно записать:
. Для каждой материальной точки можно записать:  ,
,  , поэтому
, поэтому , (1.7)
, (1.7) , (1.8)
, (1.8) – момент силы – это произведение силы
– момент силы – это произведение силы  на ее плечо
на ее плечо  .
. .
.
 – момент инерции i-й материальной точки.
– момент инерции i-й материальной точки. . (1.9)
. (1.9) .
. через М, а
через М, а  через J, тогда
через J, тогда (1.10)
(1.10) – геометрическая сумма всех моментов сил, то есть момент силы F, сообщающий всем точкам тела ускорение
– геометрическая сумма всех моментов сил, то есть момент силы F, сообщающий всем точкам тела ускорение  .
.  – алгебраическая сумма моментов инерции всех точек тела. Закон формулируется так: «Момент силы, действующий на вращающееся тело, равен произведению момента инерции тела на угловое ускорение».
– алгебраическая сумма моментов инерции всех точек тела. Закон формулируется так: «Момент силы, действующий на вращающееся тело, равен произведению момента инерции тела на угловое ускорение». , есть первая производная угловой скорости
, есть первая производная угловой скорости  по времени
по времени  , то есть
, то есть , (1.11)
, (1.11) – элементарное изменение угловой скорости тела за элементарный промежуток времени
– элементарное изменение угловой скорости тела за элементарный промежуток времени  .
. или
или  , (1.12)
, (1.12) – импульс момента силы – это произведение момента силы
– импульс момента силы – это произведение момента силы  на промежуток времени
на промежуток времени  – изменение момента импульса тела,
– изменение момента импульса тела,  – момент импульса тела есть произведение момента инерции J на угловую скорость
– момент импульса тела есть произведение момента инерции J на угловую скорость  , а
, а  есть
есть  .
. , действующий на вращательное тело, равен изменению его момента импульса
, действующий на вращательное тело, равен изменению его момента импульса  ”:
”:  или
или 
 Момент силы
Момент силы →
F
→
F


 частицы относительно некоторого начала отсчёта определяетсявекторным произведением её радиус-вектора и импульса:
частицы относительно некоторого начала отсчёта определяетсявекторным произведением её радиус-вектора и импульса: 
 — радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчёта начала отсчёта,
— радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчёта начала отсчёта,  — импульс частицы.
— импульс частицы.
 — радиус-вектор и импульс каждой частицы, входящей в систему, момент импульса которой определяется.
— радиус-вектор и импульс каждой частицы, входящей в систему, момент импульса которой определяется. где
где  — импульс бесконечно малого точечного элемента системы).
— импульс бесконечно малого точечного элемента системы). .
. и
и  , а после взаимодействия — через
, а после взаимодействия — через  и
и  .
. и
и  .
. ,
,  ,
,  . (16.3)
. (16.3)





 < с.
< с. , в частицы, у которых m = 0, их энергия покоя E0 целиком превращается в кинетическую энергию вновь образовавшихся частиц. Этот факт является наиболее очевидным экспериментальным доказательством существования энергии покоя.
, в частицы, у которых m = 0, их энергия покоя E0 целиком превращается в кинетическую энергию вновь образовавшихся частиц. Этот факт является наиболее очевидным экспериментальным доказательством существования энергии покоя.




 — сила, с которой заряд 1 действует на заряд 2;
— сила, с которой заряд 1 действует на заряд 2;  — величина зарядов;
— величина зарядов;  — радиус-вектор (вектор, направленный от заряда 1 к заряду 2, и равный, по модулю, расстоянию между зарядами —
— радиус-вектор (вектор, направленный от заряда 1 к заряду 2, и равный, по модулю, расстоянию между зарядами —  );
);  — коэффициент пропорциональности. Таким образом, закон указывает, что одноимённые заряды отталкиваются (а разноимённые — притягиваются).
— коэффициент пропорциональности. Таким образом, закон указывает, что одноимённые заряды отталкиваются (а разноимённые — притягиваются).





 - угол между силовой линией и нормалью
- угол между силовой линией и нормалью  к площадке dS;
к площадке dS;  - проекция площадки dS на плоскость, перпендикулярную силовым линиям. Тогда поток напряженности поля через всю поверхность площадки S будет равен
- проекция площадки dS на плоскость, перпендикулярную силовым линиям. Тогда поток напряженности поля через всю поверхность площадки S будет равен
 , то
, то
 - проекция вектора
- проекция вектора  на нормаль и к поверхности dS.
на нормаль и к поверхности dS.

 — поток вектора напряжённости электрического поля через замкнутую поверхность
— поток вектора напряжённости электрического поля через замкнутую поверхность  .
. — полный заряд, содержащийся в объёме, который ограничивает поверхность
— полный заряд, содержащийся в объёме, который ограничивает поверхность  — электрическая постоянная.
— электрическая постоянная.
 — объёмная плотность заряда (в случае присутствия среды — суммарная плотность свободных и связанных зарядов), а
— объёмная плотность заряда (в случае присутствия среды — суммарная плотность свободных и связанных зарядов), а  — оператор набла.
— оператор набла. , и зависит только от положений точек “а” и “b”. Такое поле называется потенциальным. Поэтому работа, очевидно, равна убыли потенциальной энергии W этого заряда
, и зависит только от положений точек “а” и “b”. Такое поле называется потенциальным. Поэтому работа, очевидно, равна убыли потенциальной энергии W этого заряда
 . Но так как
. Но так как  , то второе слагаемое тоже будет равно нулю и тогда
, то второе слагаемое тоже будет равно нулю и тогда