|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Третий закон Кеплера (гармонический закон)
Квадраты периодов обращения планет вокруг Солнца относятся, как кубы больших полуосей орбит планет. Справедливо не только для планет, но и для их спутников.
Ньютон установил, что гравитационное притяжение планеты определенной массы зависит только от расстояния до неё, а не от других свойств, таких, как состав или температура. Он показал также, что третий закон Кеплера не совсем точен — в действительности в него входит и масса планеты: Поскольку движение и масса оказались связаны, эту комбинацию гармонического закона Кеплера и закона тяготения Ньютона используют для определения массы планет и спутников, если известны их орбиты и орбитальные периоды. 33. векторная диаграмма гармонических колебаний Гармоническое (то есть синусоидальное) колебание может быть представлено графически в виде проекции на некоторую ось (обычно берут ось координат Оx) вектора, вращающегося с постоянной угловой скоростью ω. Длина вектора соответствует амплитуде, угол поворота относительно оси (Ox) - фазе. Для гармонических колебаний этот график — косинусоида (см. рис. 13.3) или синусоида. Способ векторных диаграмм. Пусть величина х изменяется со временем по закону На плоскости выбирают произвольно направленную координатную ось Ох. Из начала координат под углом
Рис. 13.5 Таким образом, гармоническое колебание можно представить проекцией на некоторую произвольно выбранную ось вектора амплитуды Сложение колебаний Колебания могут складываться и при этом усиливать или гасить друг друга, или изменять траекторию движения тела. Рассмотрим сложение колебаний, совершаемых в одном направлении. Пусть осциллятор совершает два одновременных колебания в одном направлении и одинаковой частоты ω 0: x1=A1cos(ω 0t+a1) и x2=A2cos(ω 0t+a2). Бие́ ния — явление, возникающее при наложении двух гармонических колебаний, выражающееся в периодическом уменьшении и увеличении амплитуды суммарного сигнала. Биения модулируются по амплитуде. Распространение такого вида колебаний менее эффективно. Частота изменения амплитуды суммарного сигнала равна разности частот двух исходных сигналов. Биения возникают от того, что один из двух сигналов постоянно отстаёт от другого по фазе и в те моменты, когда колебания происходят синфазно, суммарный сигнал оказывается усилен, а в те моменты, когда два сигнала оказываются в противофазе, они взаимно гасят друг друга. Эти моменты периодически сменяют друг друга по мере того как нарастает отставание. 34. При́ нцип относи́ тельности — фундаментальный физический принцип, согласно которому все физические процессы в инерциальных системах отсчёта протекают одинаково, независимо от того, неподвижна ли система или она находится в состоянии равномерного и прямолинейного движения. «Если законы механики справедливы в одной системе координат, то они справедливы и в любой другой системе, движущейся прямолинейно и равномерно относительно первой.» Такие системы называются инерциальными, поскольку движение в них подчиняется закону инерции, гласящему: «Всякое тело сохраняет состояние покоя или равномерного прямолинейного движения, если только оно не вынуждено изменить его под влиянием движущихся сил." 35. Найдем результат сложения двух гармонических колебаний одинаковой частоты ω, которые происходят во взаимно перпендикулярных направлениях вдоль осей х и у. Начало отсчета для простоты выберем так, чтобы начальная фаза первого колебания была равна нулю, и запишем это в виде
где α — разность фаз обоих колебаний, А и В равны амплитудам складываемых колебаний. Уравнение траектории результирующего колебания определим исключением из формул (1) времени t. Записывая складываемые колебания как
и заменяя во втором уравнении
Фигу́ ры Лиссажу́ — замкнутые траектории, прочерчиваемые точкой, совершающей одновременно два гармонических колебания в двух взаимно перпендикулярных направлениях. Впервые изучены французским учёным Жюлем Антуаном Лиссажу. Вид фигур зависит от соотношения между периодами (частотами), фазами и амплитудами обоих колебаний. В простейшем случае равенства обоих периодов фигуры представляют собой эллипсы, которые при разности фаз 0 или
36. Свободные гармонические колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия. Чтобы свободные колебания были гармоническими, необходимо, чтобы колебательная система была линейной (описывалась линейными уравнениями движения), и в ней отсутствовала диссипация энергии (последняя вызвала бы затухание). 37. Потенциальные силы, силы, работа которых зависит только от начального и конечного положения точек их приложения и не зависит ни от вида траекторий, ни от закона движения этих точек. При замкнутой траектории работа потенциальной силы всегда равна нулю. К потенциальным силам относятся силы тяготения, силы упругости, электростатические силы и некоторые другие. Потенциальная энергия, часть общей механической энергии системы, зависящая от взаимного расположения частиц, составляющих эту систему, и от их положений во внешнем силовом поле (например, гравитационном; см. Поля физические). Численно П. э. системы в данном её положении равна работе, которую произведут действующие на систему силы при перемещении системы из этого положения в то, где П. э. условно принимается равной нулю (П = 0). Из определения следует, что понятие П. э. имеет место только для консервативных систем, т. е. систем, у которых работа действующих сил зависит только от начального и конечного положения системы. Так, для груза весом Р, поднятого на высоту h, П. э. будет равна П = Ph (П = 0 при h = 0); для груза, прикрепленного к пружине, П = 0, 5сl2, где l — удлинение (сжатие) пружины, с — её коэффициент жёсткости (П = 0 при l = 0); для двух частиц с массами m1 и m2, притягивающихся по закону всемирного тяготения, П = —fm1m2/r, где f — гравитационная постоянная, r — расстояние между частицами (П = 0 при r = ¥ ); Эквипотенциальная поверхность — понятие, применимое к любому потенциальному векторному полю, например, к статическому электрическому полю или к ньютоновскому гравитационному полю. Эквипотенциальная поверхность — это поверхность, на которой скалярный потенциал данного потенциального поля принимает постоянное значение (поверхность уровня потенциала). Другое, эквивалентное, определение — поверхность, в любой своей точке ортогональная силовым линиям поля. Связь силы и потенциальной энергии. Каждой точке потенциального поля соответствует, с одной стороны, некоторое значение вектора силы
Для установления этой связи вычислим элементарную работу
где Поскольку в данном случае работа совершается за счет запаса потенциальной энергии
Из двух последних выражений получаем
Откуда
Последнее выражение дает среднее значение получить значение
Так как
Это соотношение справедливо для любого направления в пространстве, в частности и для направлений декартовых координатных осей х, у, z:
Эта формула определяет проекции вектора силы на координатные оси. Если известны эти проекции, оказывается определенным и сам вектор силы:
в математике вектор где а - скалярная функция х, у, z, называется градиентом этого скаляра обозначается символом
38. Пружинный маятник — механическая система, состоящая из пружины с коэффициентом упругости (жёсткостью) k (закон Гука), один конец которой жёстко закреплён, а на втором находится груз массы m. Когда на массивное тело действует упругая сила, возвращающая его в положение равновесия, оно совершает колебания около этого положения.Такое тело называют пружинным маятником. Колебания возникают под действием внешней силы. Колебания, которые продолжаются после того, как внешняя сила перестала действовать, называют свободными. Колебания, обусловленные действием внешней силы, называют вынужденными. При этом сама сила называется вынуждающей. В простейшем случае пружинный маятник представляет собой движущееся по горизонтальной плоскости твердое тело, прикрепленное пружиной к стене. Второй закон Ньютона для такой системы при условии отсутствия внешних сил и сил трения имеет вид:
Если на систему оказывают влияние внешние силы, то уравнение колебаний перепишется так:
В случае наличия затухания, пропорционального скорости колебаний с коэффициентом c:
39. Вес тела — сила воздействия тела на опору (или подвес или другой вид крепления), препятствующую падению, возникающая в поле сил тяжести. (В случае нескольких опор под весом понимается суммарная сила, действующая на все опоры; впрочем, для жидких и газообразных опор в случае погружения тела в них часто делается исключение, т.е. тогда силы воздействие тела на них исключают из веса и включают в силу Архимеда). Единица измерения веса в СИ — ньютон, иногда используется единица СГС — дина. Вес P тела, покоящегося в инерциальной системе отсчёта
Значение веса (при неизменной массе тела) пропорционально ускорению свободного падения, которое зависит от высоты над земной поверхностью (или поверхностью другой планеты, если тело находится вблизи нее, а не Земли, и массы и размеров этой планеты), и, ввиду несферичности Земли, а также ввиду ее вращения (см. ниже), от географических координат точки измерения. Другим фактором, влияющим на ускорение свободного падения и, соответственно, вес тела, являются гравитационные аномалии, обусловленные особенностями строения земной поверхности и недр в окрестностях точки измерения. При движении системы тело — опора (или подвес) относительно инерциальной системы отсчёта c ускорением
Невесо́ мость — состояние, при котором сила взаимодействия тела с опорой (вес тела), возникающая в связи с гравитационным притяжением, действием других массовых сил, в частности силы инерции, возникающей при ускоренном движении тела, отсутствует. Иногда можно слышать другое название этого эффекта — микрогравитация. Это название неверно для околоземного полета. Гравитация (сила притяжения) остаётся прежней. Но при полете на больших расстояниях от небесных тел, когда их гравитационное влияние пренебрежимо мало, действительно возникает микрогравитация. 40. Математическим маятником называется материальная точка, подвешенная на нерастяжимой невесомой нити, совершающая колебательное движение в одной вертикальной плоскости под действием силы тяжести.
Таким маятником можно считать тяжелый шар массой m, подвешенный на тонкой нити, длина l которой намного больше размеров шара. Если его отклонить на угол α (рис.7.3.) от вертикальной линии, то под влиянием силы F – одной из составляющих веса Р он будет совершать колебания. Другая составляющая
Знак минус в правой части означает то, что сила F направлена в сторону уменьшения угла α. С учетом малости угла α
Для вывода закона движения математического и физического маятников используем основное уравнение динамики вращательного движения Момент силы относительно точки О: С учетом этих величин имеем: или
Его решение
Как видим, период колебаний математического маятника зависит от его длины и ускорения силы тяжести и не зависит от амплитуды колебаний. Физическим маятником называется твердое тело, закрепленное на неподвижной горизонтальной ocи (оси подвеса), не проходящей через центр тяжести, и совершающее колебания относительно этой оси под действием силы тяжести. В отличие от математического маятника массу такого тела нельзя считать точечной.
При небольших углах отклонения α (рис. 7.4) физический маятник так же совершает гармонические колебания. Будем считать, что вес физического маятника приложен к его центру тяжести в точке С. Силой, которая возвращает маятник в положение равновесия, в данном случае будет составляющая силы тяжести – сила F.
Знак минус в правой части означает то, что сила F направлена в сторону уменьшения угла α. С учетом малости угла α
Для вывода закона движения математического и физического маятников используем основное уравнение динамики вращательного движения
Решение этого уравнения Определим длину l математического маятника, при которой период его колебаний равен периоду колебаний физического маятника, т.е.
Данная формула определяет приведенную длину физического маятника, т.е. длину такого математического маятника, период колебаний которого равен периоду колебаний данного физического маятника.
41. Из закона всемирного тяготения следует, что у поверхности Земли все тела должны падать с одинаковым ускорением. В самом деле, по второму закону Ньютона ускорение, приобретаемое телом с массой m у поверхности Земли a = F/m, где F — сила, с которой тело притягивается земным шаром. По закону тяготения
M3 — масса Земли и R3 — радиус земного шара. Отсюда и не зависит от массы падающего тела. Таким образом, все тела у поверхности Земли независимо от их массы падают с одинаковым ускорением
которое называется ускорением свободного падения. Подставляя сюда известные значения констант, получим значение 9, 8 м/c2. В действительности значения gслегка различаются при учете сил сопротивления и реальной формы Земли. По второму закону Ньютона это означает, что в поле тяжести Земли все тела испытывают силу тяжести, равную mg. При перемещении массы с одной высоты на другую эта сила тяжести совершает работу, которую можно вычислить как изменение потенциальной энергии тела. Космическая скорость это начальная скорость, необходимая для запуска ракет в космическое пространство. Первая космическая скорость - это минимальная скорость, которую необходимо сообщить телу, чтобы оно могло двигаться вокруг Земли по круговой орбите, то есть превратиться в искусственный спутник Земли. На спутник, движущийся по круговой орбите радиусом r, действует сила тяготения Земли, сообщающая ему нормальное ускорение. Первая космическая скорость - формула:
Первой космической скорости недостаточно для того чтобы тело могло выйти из сферы земного притяжения. Вторая космическая скорость - это наименьшая скорость, которую надо сообщить телу, чтобы оно могло преодолеть притяжение Земли и превратиться в спутник Солнца, то есть чтобы его орбита в поле тяготения Земли стала параболической. Вторая космическая скорость равна 11, 2 км/с (v = 11, 2). Третья космическая скорость - это скорость, которую необходимо сообщить телу на Земле, чтобы оно покинуло пределы Солнечной системы, преодолев притяжение Солнца. Третья космическая скорость равна 16, 7 км/с (v = 16, 7). Космическая скорость
Впервые космические скорости были достигнуты в СССР: первая - при запуске первого искусственного спутника Земли в 1957 году, вторая - при запуске ракеты в 1959 году. После исторического полета Ю. А. Гагарина в 1961 году начинается бурное развитие космонавтики. 42.ЗАТУХАЮЩИЕ КОЛЕБАНИЯ.ИХ ХАРАКТЕРИСТИКИ |
Последнее изменение этой страницы: 2017-03-14; Просмотров: 399; Нарушение авторского права страницы
 , где
, где  и
и  — периоды обращения двух планет вокруг Солнца, а
— периоды обращения двух планет вокруг Солнца, а  и
и  — длины больших полуосей их орбит.
— длины больших полуосей их орбит. , где
, где  — масса Солнца, а
— масса Солнца, а  и
и  — массы планет.
— массы планет.
 равным начальной фазе колебаний, проводят вектор
равным начальной фазе колебаний, проводят вектор  , модуль которого равен амплитуде гармонического колебания A (рис. 13.5). Если вектор
, модуль которого равен амплитуде гармонического колебания A (рис. 13.5). Если вектор  против часовой стрелки, то угол
против часовой стрелки, то угол  между вращающимся вектором и осью Ох в любой момент времени определится выражением
между вращающимся вектором и осью Ох в любой момент времени определится выражением  Проекция конца вектора
Проекция конца вектора 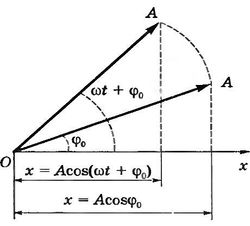

 , равным начальной фазе, и вращающегося с угловой скоростью
, равным начальной фазе, и вращающегося с угловой скоростью 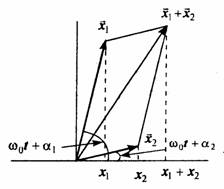


 на
на  и
и  на
на  , найдем после несложных преобразований уравнение эллипса, у которого оси ориентированы произвольно относительно координатных осей:
, найдем после несложных преобразований уравнение эллипса, у которого оси ориентированы произвольно относительно координатных осей: 
 вырождаются в отрезки прямых, а при разности фаз
вырождаются в отрезки прямых, а при разности фаз  и равенстве амплитуд превращаются в окружность. Если периоды обоих колебаний неточно совпадают, то разность фаз всё время меняется, вследствие чего эллипс всё время деформируется. При существенно различных периодах фигуры Лиссажу не наблюдаются. Однако, если периоды относятся как целые числа, то через промежуток времени, равный наименьшему кратному обоих периодов, движущаяся точка снова возвращается в то же положение — получаются фигуры Лиссажу более сложной формы. Фигуры Лиссажу вписываются в прямоугольник, центр которого совпадает с началом координат, а стороны параллельны осям координат и расположены по обе стороны от них на расстояниях, равных амплитудам колебаний.
и равенстве амплитуд превращаются в окружность. Если периоды обоих колебаний неточно совпадают, то разность фаз всё время меняется, вследствие чего эллипс всё время деформируется. При существенно различных периодах фигуры Лиссажу не наблюдаются. Однако, если периоды относятся как целые числа, то через промежуток времени, равный наименьшему кратному обоих периодов, движущаяся точка снова возвращается в то же положение — получаются фигуры Лиссажу более сложной формы. Фигуры Лиссажу вписываются в прямоугольник, центр которого совпадает с началом координат, а стороны параллельны осям координат и расположены по обе стороны от них на расстояниях, равных амплитудам колебаний.
 , действующей на тело, и, с другой стороны, некоторое значение потенциальной энергии
, действующей на тело, и, с другой стороны, некоторое значение потенциальной энергии  . Следовательно, между силой и потенциальной энергией должна существовать определенная связь.
. Следовательно, между силой и потенциальной энергией должна существовать определенная связь.
 , совершаемую силами поля при малом перемещении
, совершаемую силами поля при малом перемещении  тела, происходящем вдоль произвольно выбранного направления в пространстве, которое обозначим буквой
тела, происходящем вдоль произвольно выбранного направления в пространстве, которое обозначим буквой  . Эта работа равна
. Эта работа равна
 - проекция силы
- проекция силы  на отрезке оси
на отрезке оси 




 ,
,  . Следовательно сила равна градиенту потенциальной энергии, взятого с обратным знаком
. Следовательно сила равна градиенту потенциальной энергии, взятого с обратным знаком

 , где f(x) — это равнодействующая внешних сил соотнесённая к единице массы груза.
, где f(x) — это равнодействующая внешних сил соотнесённая к единице массы груза.
 — период колебаний пружинного маятника.
— период колебаний пружинного маятника. совпадает с силой тяжести, действующей на тело, и пропорционален массе
совпадает с силой тяжести, действующей на тело, и пропорционален массе  и ускорению свободного падения
и ускорению свободного падения  в данной точке:
в данной точке: 
 вес перестаёт совпадать с силой тяжести:
вес перестаёт совпадать с силой тяжести: 

 , направленная вдоль нити, не учитывается, т.к. уравновешивается силой натяжения нити. При малых углах смещения
, направленная вдоль нити, не учитывается, т.к. уравновешивается силой натяжения нити. При малых углах смещения  и, тогда координату х можно отсчитывать по горизонтальному направлению. Из рис.7.3 видно, что составляющая веса, перпендикулярная нити, равна
и, тогда координату х можно отсчитывать по горизонтальному направлению. Из рис.7.3 видно, что составляющая веса, перпендикулярная нити, равна

 , и момент инерции:
, и момент инерции: 
 ,
,  и
и 
 . Момент силы: определить в явном виде нельзя. С учетом всех величин, входящих в исходное дифференциальное уравнение колебаний физического маятника имеет вид:
. Момент силы: определить в явном виде нельзя. С учетом всех величин, входящих в исходное дифференциальное уравнение колебаний физического маятника имеет вид: 
 или
или .
.
 , (1.44)
, (1.44)
 , (1.45)
, (1.45)