
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Передача информации по каналам связи
3.1. Промышленные информационные сети Передача информации по каналам связи решает следующие задачи (см.рис.1.2): - обмен информацией между пультом управления и процессорным блоком УВМ; - обмен информацией между УВМ и технологическим объектом управления (ТО); - обмен информацией между локальной и центральной УВМ. Обмен информации между ПУ и ПБ включает в себя организацию связи между человеком-оператором и АСУТП с помощью клавиатуры, дисплея, принтера и различных средств индикации. Кроме того обычно реализуется связь с ВЗУ, выполненными на магнитных дисках и дискетах. Связь с технологическим объектом обеспечивается, прежде всего, через модули выдачи и приема дискретных сигналов, а также с помощью специализированных модулей. В частности, выдача и прием непрерывных сигналов обеспечивается с помощью модулей ЦАП и АЦП. Обмен информацией в УВМ осуществляется при помощи двоичных кодовых комбинаций фиксированной величины, называемых словами. Величина слов, обрабатываемых ЛУВМ, обычно равна 1-2 байт. Передача дискретной информации между различными уровнями управления АСУТП производится словами или объединениями слов, называемыми кадрами. Различают два основных способа передачи информации: · параллельная передача слова информации внутри УВМ (все биты слова передаются одновременно, параллельно); · последовательная передача слова или кадра информации между УВМ и исполнительным устройством, между ЛУВМ и ЦУВМ, когда биты информации, передаются один за другим в заданной последовательности. Совокупность правил обмена информацией между двумя соседними уровнями управления, а также совокупность проводов и иных технических средств, обеспечивающих такой обмен информацией, называется интерфейсом. В настоящее время в АСУТП применяют почти исключительно стандартные интерфейсы, т.е. интерфейсы, которые обеспечивают заданный международным или иным стандартом порядок обмена информацией независимо от технической базы, на которой реализованы конкретные модификации того или иного интерфейса. При параллельной передаче слов информации используется параллельный интерфейс. В нем число проводов, по которым передается информация, должно быть не меньше числа битов передаваемого слова. Так, для параллельной передачи слова в два байта необходимо иметь шину связи, с учетом общего провода, из не менее чем 17 проводов. В то же время для последовательной передачи информации посредством последовательного интерфейса достаточно иметь только два связных провода независимо от величины передаваемых слов. Многопроводную шину трудно уберечь от помех, ее стоимость много выше стоимости двухпроводной связи. Поэтому параллельную передачу информации применяют при расстоянии между объектами связи, не превышающем 1-2 метра, преимущественно внутри УВМ. Обмен информацией как с помощью параллельного интерфейса, так и с помощью последовательного может быть двух видов: синхронный и асинхронный. При синхронном обмене информацией время и темп выдачи слов управления и записи сигналов обратной связи определяется исключительно тактовыми импульсами УВМ. При асинхронном обмене информацией время и темп выдачи и приема информации определяется также и сообщениями, поступающими от технологического объекта, оператора или от ЦУВМ. Обмен информацией внутри УВМ строится по синхронному принципу, но для связи с внешними устройствами (ВУ) широко применяется асинхронный обмен. Передача слова информации сопровождается управляющими сигналами, один из которых инициирует начало передачи слова, а второй информирует о конце передачи (приема) слова. Для управления передачей слова информации в параллельном интерфейсе должно быть не менее двух дополнительных связных проводов, а в последовательном интерфейсе должна быть предусмотрена передача не менее двух (стартового и стопового) дополнительных битов информации. Отдельные производственные модули (ПМ) автоматизируемого объекта обычно разбросаны на достаточно большой производственной территории. Каждый из них, имея собственную систему управления, объединяется для согласованной работы с другими ПМ посредством ЦУВМ. Большие расстояния отдельных узлов автоматизируемых объектов друг от друга делают целесообразным применение исключительно последовательных интерфейсов как для связи между ЦУВМ и ЛУВМ, так и для обмена информацией между ЛУВМ, управляющими производственными модулями, и исполнительными устройствами. АСУТП, объединенная устройствами последовательной связи, принимает вид распределенной системы управления. Совокупность программ, устройств и проводов, которые обеспечивают обмен информацией в АСУТП, называют промышленной информационной сетью. Способ соединения отдельных устройств в такой сети составляет её топологию. Управляющие устройства, входящие в состав сети, называются её узлами, а совокупности проводов, соединяющих узлы, называют разделяемым (между составляющими узлами) физическим каналом или разделяемой средой передачи данных (shared media). Наиболее распространенными сетевыми топологиями являются звезда, кольцо и шина. О соединении в звезду(star) говорят в тех случаях, когда порядок обмена информацией определяется одним управляющим устройством, которое в таком случае называется центральным узлом, или master (ведущий). Остальные устройства (узлы), участвующие в обмене информацией, называются slave (ведомый). Такой порядок характерен для обмена информацией между ПЛК и исполнительными устройствами, где отказ центрального узла ПЛК не скажется на функционировании АСУТП в целом. Кольцевой структурой, или кольцом (ring), называют такой порядок обмена информацией, когда роль ведущего узла (master) играют по очереди все управляющие устройства, участвующие в обмене информацией. При этом каждое устройство получает возможность инициировать необходимый ему обмен информацией только в момент получения специального сообщения, называемого маркером (token), и на ограниченное время. Одна из стандартных сетевых технологий, реализующих при обмене информацией принцип передачи маркера по кольцу, так и называется: Token Ring («маркерное кольцо»). Шинная топология соответствует объединению всех участвующих в обмене информацией устройств посредством общей линии связи, называемой шиной (bus), или магистралью. В условиях распределенной системы управления, каковой является АСУТП, общая шина является малопроводной, предназначенной для одновременного обмена информацией лишь между какими-либо двумя устройствами, причем в последовательном коде. Физическое соединение через общую шину может соответствовать логическому соединению в звезду в том случае, когда один из участников обмена по общей шине является ведущим (master), т.е. определяющим порядок доступа к ней, порядок «захвата» шины. С другой стороны, если доступ к шине определяется передачей маркера устройству, которое путем предварительного распределения шинных ресурсов признано «достойным» играть роль ведущего в текущем цикле обмена информацией, то имеет место логическое соединение участников обмена информацией в кольцо. Наиболее распространенным стандартным способом распределения шинных ресурсов является метод коллективного доступа с наблюдением за несущей и обнаружением коллизий, имеющий обозначение CSMA/CD (Carrier Sense Multiple Access with Collision Detection). Этим методом организует доступ к шинным ресурсам наиболее популярная сетевая технология Ethernet. Согласно этому методу любое устройство из подключенных к общей шине может начать передачу данных, если в течение условленного промежутка времени передачу данных не начало никакое другое устройство. О том, что шина свободна, свидетельствует отсутствие на ней напряжения несущей частоты. При появлении несущей частоты все устройства, подключенные к общей шине, осуществляют прием начавшейся передачи. Пока устройство, начавшее передачу, не закончит её, остальные устройства, подключенные к общей шине, не могут войти в режим передачи. Время передачи не может превышать заданного предела, чтобы не было чрезмерной задержки передачи данных для всех устройств, претендующих на режим передачи. Если случайным образом окажется, что одновременно начали передачу сразу два устройства, то такой режим является ненормальным и называется коллизией. Коллизия обнаруживается по повышенному напряжению несущей. В случае коллизии все устройства, начавшие передачу, прекращают её на некоторое время. Величина выдержки времени после коллизии выбирается для каждого устройства различной, с помощью генератора случайных величин. Благодаря этому по окончании выдержки времени коллизия между устройствами, ранее бывшими в состоянии коллизии, вновь не возникает. Метод CSMA/CD не гарантирует доступа к общей шине при большой загруженности информационной сети из-за большого количества коллизий, но он предоставляет возможность быстрого доступа при малой загруженности сети. Метод с передачей маркера, напротив, гарантирует каждому узлу доступ к общей шине, но лишь при наступлении очереди на передачу информации после обхода кольца. Поэтому сетевые технологии с применением метода CSMA/CD более эффективны при малой загрузке сети (менее 30 %), а при большой загрузке целесообразно использовать системы с передачей маркера. Технология обмена информацией в АСУТП имеет стандартизированную трехуровневую структуру, построенную в соответствии со стандартной семиуровневой моделью OSI (Open Systems Interconnection) взаимодействия открытых систем, предложенной Международной организацией по стандартизации (ISO). Обычно информационные сети АСУТП поддерживают 1-й, 2-й и 7-й уровни модели OSI, т.е. физический, канальный и прикладной уровни. На физическом уровне (Physical Layer) информация передается побитно. Биты информации передаются последовательно, один за другим по конкретным физическим каналам связи (коаксиальный кабель, витая пара, оптоволоконный кабель и др.). При этом определяются характеристики сигналов, тип кодирования битовых последовательностей, параметры сред передачи данных, стандартизируются разъемы и назначение контактов. На канальном уровне (Data Link Layer) биты группируются в наборы, называемые кадрами (frames). Канальный уровень обеспечивает корректную передачу кадра путем добавления специальных битов, обеспечивающих опознавание кадра и контроль правильности его передачи. Обмен информацией на канальном уровне зависит от принятой сетевой технологии: Modbus, Profibus, Ethernet, Token Ring, FDDI (оптоволоконная технология) и др. На прикладном уровне (Application Layer) обеспечивается связь прикладной программы управления техпроцессом с управляемыми исполнительными устройствами через нижележащие уровни обмена информацией. Описание взаимодействия одноименных уровней обмена информацией, находящихся в разных узлах, принято называть протоколом. Интерфейсом же, при построении системы обмена информацией в соответствии с моделью OSI, называют стандарт взаимодействия между соседними уровнями обработки информации в одном узле. Соответственно стандарт обмена информацией между канальным и физическим уровнями OSI, называют физическим интерфейсом.
3.2. Последовательные интерфейсы по стандартам RS232C и RS485 В качестве примера рассмотрим применение весьма распространенных в контроллерном программном управлении и в УЧПУ физических последовательных интерфейсов по стандартам RS232C и RS485 (RS – Recommended Standard). Эти стандарты были разработаны американской ассоциацией EIA (Electronics Industries Alliance). Основное назначение интерфейса RS232C – обеспечение связи УВМ с управляемым объектом по методу PtP (Point-to-Point –точка-точка). По стандарту RS232С функционирует COM-порт(Communication Port) персонального компьютера. Поскольку RS232C является радиальным интерфейсом типа PtP, то понятие адреса в нем отсутствует. Об основных функциях системы передачи по стандарту RS232C дает представление описание сигналов данного интерфейса, приведенное в таблице 3.1.
Таблица 3.1. Назначение основных сигналов интерфейса RS232C
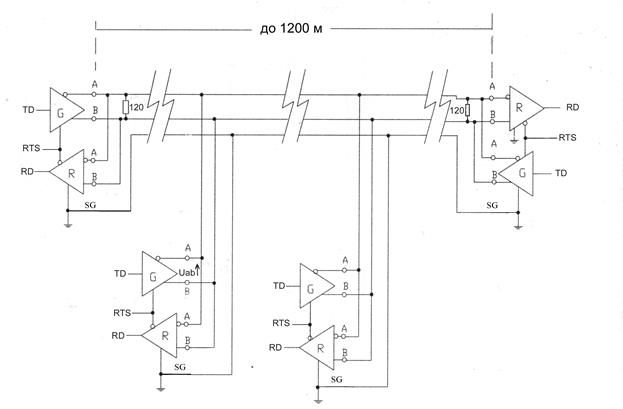
Согласно таблице 3.1 информация передается через интерфейс RS232C в оконечное устройство в виде импульсов напряжения между проводами TD и SG, а в обратном направлении – по проводу RD относительно того же SG. Таким образом, обеспечивается возможность реализации дуплексного режима связи, т.е. одновременной передачи информации в обоих направлениях. Обмен информацией в интерфейсе RS232C начинается с установление сигнала DTR=1, означающем готовность контроллера интерфейса к обмену данными. Если в ответ оконечное устройство также объявит о готовности к обмену данными путем установки DSR=1, то передача данных в оконечное устройство будет осуществляться при наличии сигналов RTS=1и CTS=1 одновременно. Процесс передачи информации проходит либо в асинхронном, либо в синхронном режиме. В асинхронном режиме обмен информацией производится побайтно. Для синхронизации передающего узла интерфейса с приемной частью, в поток информации вставляют стартовый бит перед передачей каждого байта информации, а в конце каждого байта вставляют стоповый бит. Стартовый бит соответствует уровню логического нуля, а стоповый бит – уровню логической единицы. В течение всего времени паузы пока не начнется передача нового байта информации, на линии передачи поддерживается состояние логической единицы. В синхронном режиме оформление кадра информации (побайтно или в иной форме) и его адресация производятся на канальном уровне обмена информацией. Максимальное быстродействие RS232C соответствует скорости передачи 115, 2 кбит/с при длине линии связи до 15 м, поскольку его линии связи несимметричны. Если необходимо вести обмен информацией способом последовательной передачи данных по одной и той же линии между несколькими устройствами (многоточечный режим), то время использования этой линии для передачи данных должно быть поделено между всеми устройствами, ведущими передачу. Для сохранения той же средней скорости передачи за цикл обмена данными между всеми устройствами, что и при работе в одноточечном режиме, скорость обмена данными при работе в многоточечном режиме должна быть повышена пропорционально количеству устройств, подключенных к линии передачи. Это может быть достигнуто путем перехода от однопроводной несимметричной линии к двухпроводной симметричной линии связи. Задача обеспечения многоточечного режима обмена данными и повышение скорости передачи решается с помощью интерфейса RS485, включаемого на выходе интерфейса RS232С через согласующее устройство (адаптер). Типичная двухпроводная информационная сеть, построенная на базе интерфейса RS485, приведена на рис. 3.1. Основой каждого интерфейсного узла RS485 является пара электронных преобразовательных устройств: G и R. Одно из них (G) преобразует несимметричное входное напряжение в симметричное линейное напряжение между точками А и В на его выходе. Устройство G является передатчиком сигналов TD, которые поступают на вход G с выхода интерфейса RS232С. Единичному логическому сигналу на выходе АВ соответствует отрицательное напряжение в точке А по отношению к точке В (UАВ), а нулевому сигналу – положительное напряжение UАВ. Таким образом, передача информации осуществляется разнополярными импульсами напряжения одной и той же амплитуды, что облегчает реализацию гальванической развязки. Устройство R является приемником, оно преобразует симметричный дифференциальный сигнал UАВ, поступающий с линии связи, в несимметричный выходной сигнал RD. В целом симметричная дифференциальная система связи, на которой построена информационная сеть рис. 3.1, реализуется с помощью трех проводов: связных проводов А и В и общего провода SG (сигнальная земля). Такая трехпроводная система связи позволяет создать помехоустойчивую скоростную магистраль со скоростью передачи до 10 Мбит/с при длине линии связи до 15 м и не менее 90кбит/с при длине линии связи до 1200 м. На такой линии связи может быть подключено до 32 приемо-передающих узлов.
Рис.3.1. Типичная двухпроводная многоточечная информационная сеть на базе интерфейса RS485
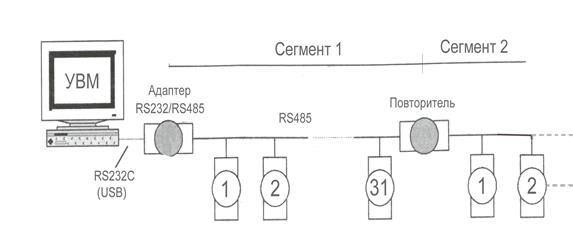
У обоих концов линии связи должны быть подключены согласующие резисторы величиной 120 Ом. Подключение таких резисторов в промежуточных точках подсоединения адаптеров RS485 не требуется. Все передатчики информационной сети рис. 3.1 передают информацию в одну и ту же информационную магистраль, так что когда один передатчик передает данные, остальные должны быть отключены. Чтобы это стало возможным, все передатчики G (как и приемные устройства R) реализованы в виде схем с тремя возможными состояниями выходов: логическая единица, логический ноль и отключенное состояние. Каждое из устройств G включено при сигнале запроса передачи RTS=1, а работающее с ним в паре в составе интерфейса RS485 приемное устройство R при этом отключено (см. рис.3.1). При RTS=0 передатчик G интерфейса RS485 оказывается отключенным, а приемник R соответственно включенным. Поскольку в двухпроводной информационной системе, построенной на интерфейсе RS485, включенным может быть только один передатчик, все остальные узлы информационной сети будут работать в режиме приема. Те из них, кому адресованы передаваемые данные, будут их принимать через приемные устройства R. Последние преобразуют данные, пришедшие в виде симметричных импульсов напряжения UАВ, в несимметричные сигналы RD, которые через адаптер попадают на интерфейс RS 232С или в приемный регистр исполнительного устройства, управляемого от УВМ. Любое исполнительное устройство может передавать через передатчик G запрошенные данные в УВМ. Локальные сети АСУТП обычно построены по схеме ведущий – ведомый и употребляют интерфейс RS485. В качестве примера рассмотрим двухпроводную информационную сеть, состоящую из ведущей УВМ и ведомых устройств. УВМ через адаптер RS232/RS485 связана с ведомыми оконечными устройствами, количество которых превышает 32 (рис.3.2). В этом случае увеличение количества подключаемых оконечных устройств типа УСО и интеллектуальных датчиков достигается за счет использования повторителя. Повторитель (repeater) системы RS485 является двухпроводным двухсторонним устройством, которое передает данные, генерируемые в информационной сети, в обе стороны с одновременным восстановлением исходной амплитуды импульсов передаваемых данных. С его вторичной стороны может быть подключено еще 32 оконечных устройства.
Рис. 3.2. Информационная сеть RS485 по схеме ведущий-ведомый
Локальная сеть, построенная на базе интерфейса RS485, аналогично приведенной на рис.3.2, может быть присоединена к УВМ и через интерфейс USB, но с адаптером USB/RS485. Интерфейс USB отличается повышенными скоростями передачи (до 12Мбит/с при длине связного сегмента до 5 м), а также малогабаритными надежными разъемами.
3.3. Информационная структура АСУТП Информационная структура АСУТП с учетом взаимодействия с оператором и АСУП приведена на рис.3.3. На верхнем уровне (уровень 1) находятся автоматизированные рабочие места (АРМ) технолога, ведущего технологическую подготовку производства по системе АСТПП в рамках ГПС, и оператора АСУТП. Основой аппаратной части АРМ является промышленный компьютер ПК, который играет роль ЦУВМ. На втором уровне управления в качестве ЛУВМ, управляющих локальными ТО, выступают программируемые логические контроллеры ПЛК и устройства ЧПУ (УЧПУ). Контроллеры ПЛК применяются, когда главным назначением ЛУВМ является управление технологическим циклом, которое состоит, в основном, во включении и отключении различных технологических агрегатов. Операции включения и отключения, а также прием сигналов обратной связи от технологического оборудования производятся с помощью специализированных модулей УСО. От ПЛК могут быть также реализованы несложные операции по регулированию автоматизированных электроприводов (АЭП). Более сложные функции ЧПУ реализуются УЧПУ, которые помимо управления технологическим циклом обеспечивают управление многими следящими АЭП. Системы управления АЭП и другими исполнительными устройствами, а также автоматизированные системы сбора первичной технологической информации составляют третий, самый нижний уровень управления в АСУТП. Устройства получения, пересылки и хранения информации на каждом уровне АСУТП образуют информационную сеть. Структура такой сети чаще всего имеет вид совокупности магистралей (линий), к которым подсоединяются отдельные источники, преобразователи и приемники информации. Промышленные компьютеры ПК верхнего уровня АСУТП объединяются в промышленную информационную сеть, как показано на рис. 3.3, с помощью сетевой технологии Ethernet (произносится этернет). Сеть Ethernet объединяет ПК в рамках АСУП. На контроллерном уровне (уровень 2) также применяется технология Ethernet, но здесь с нею конкурируют локальные сети Profibus, Canbus и др.
Рис. 3.3. Информационная структура АСУТП
На нижнем уровне АСУТП функции объединения датчиков, систем управления исполнительными механизмами и контроллеров в единую цифровую сеть осуществляется системой Fieldbus (полевая сеть). Она заменяет аналоговые интерфейсы 4-20мА и 0-10В цифровой коммуникационной технологией. Благодаря этому большое количество отдельных линий связи, идущих от датчиков и исполнительных устройств к модулям ввода-вывода ПЛК и УЧПУ, удается заменить на один информационный малопроводный кабель, по которому также поступает электропитание датчиков и маломощных исполнительных устройств. Системы управления нижнего уровня становятся «интеллектуальными», могут выполнять функции самонастройки и самодиагностики, так что снижается информационная нагрузка на управляющие устройства верхних уровней. Наиболее распространены варианты системы Fieldbus на базе стандартизированных сетевых технологий Profibus фирмы SIEMENS (ФРГ) и Modbus фирмы MODICON (Франция).
Лекция 4 Алгоритмы управления АСУТП
4.1. Задачи управления в АСУТП Для решения основной задачи АСУТП, заключающейся в оптимизации функционирования технологического объекта (ТО), необходимо обеспечить решение ряда частных задач, которые подразделяются на три типа: 1) стабилизация параметров техпроцесса при различных возмущениях; 2) программное управление технологическим циклом; 3) автоматическая оптимизация техпроцесса в ходе выполнения производственной программы. Решение этих задач описывается алгоритмами, которые мы будем называть алгоритмами управления. Алгоритмы управления определяют порядок подачи управляющих воздействий на исполнительные устройства АСУТП. Они должны обеспечивать программирование работы АСУТП в соответствии с заданным критерием оптимальности (целевой функцией) функционирования управляемого ТО. В зависимости от характера функционирования ТО и его составных частей алгоритмы управления АСУТП делятся на три группы: 1) алгоритмы стабилизации значений управляющих параметров на уровнях, обеспечивающих оптимальный ход техпроцесса; 2) алгоритмы оптимального программно-следящего управления в рамках технологического цикла; 3) алгоритмы автоматической оптимизации техпроцесса в процессе его реализации. Последние применяются в тех случаях, когда оптимальные параметры техпроцесса не могут быть определены и заданы заранее.
4.2. Алгоритмы стабилизации управляющих параметров Алгоритмы стабилизации предназначены для поддержания значений параметров АСУТП на заданном уровне. Известны два основных приема стабилизации: по отклонению и по возмущению. При стабилизации по отклонению измеряется отклонение регулируемого параметра от заданного значения, а затем вырабатывается управляющее воздействие, обеспечивающее ликвидацию возникшего по той или иной причине отклонения. Если регулирующее воздействие достаточно действенно, то возникшее отклонение будет в конце концов ликвидировано, но предотвратить отклонение таким способом невозможно, так как регулирующее воздействие формируется только после возникновения отклонения. При стабилизации по возмущению сигнал, пропорциональный возмущающему воздействию, подается в регулирующее устройство, где преобразуется таким образом, чтобы в месте воздействия возмущения было сформировано управляющее воздействие, равное по величине и противоположное по знаку возмущающему воздействию. В таком случае возмущение может быть полностью скомпенсировано и тогда не сможет вызвать отклонение регулируемого параметра от заданного значения. Однако такое отклонение может иметь место в силу наличия возмущений какой-либо иной природы. Скажем, если скомпенсировано возмущение электропривода нагрузкой, то отклонение регулируемого параметра данного электропривода от заданного значения может быть вызвано, например, изменением температуры окружающей среды и многими другими факторами. Кроме того, стабилизация параметров АСУТП осложняется дополнительно тем обстоятельством, что АСУТП являются многосвязными системами, у которых изменение одного параметра приводит к изменению многих других взаимно влияющих друг на друга параметров. Будем считать, что каждый управляемый параметр АСУТП задается особым задающим воздействием (уставкой). Совокупность звеньев АСУТП, ведущих от задающего воздействия к месту формирования параметра, для управления которым предназначено данное задающее воздействие, будем называть каналом управления. Управляемые координаты АСУТП зависят, как правило, не только от значения «своего» управляющего воздействия и внешних возмущений, но и от других управляющих воздействий, предназначенных для управления другими параметрами АСУТП. Управляющие воздействия других каналов управления являются для рассматриваемого канала внутренними (в рамках АСУТП) возмущающими воздействиями. Также и внешние возмущения могут воздействовать на различные каналы управления по-разному. Взаимное влияние каналов управления друг на друга принято учитывать в виде перекрестных связей этих каналов. Модели многоканальных объектов с перекрестными связями представляют собой многомерные системы, описываемые алгебраическими и дифференциальными уравнениями. Задача стабилизации параметров в многомерной системе решается как путем учета и компенсации возмущений, являющихся причиной отклонения параметров от заданных значений, так и путем ликвидации возникших отклонений. Многоканальные управляющие системы, в которых с заданной точностью достигается компенсация действия возмущений, называются инвариантными по отношению к компенсируемым возмущениям. Рассмотрим пути достижения инвариантности стабилизируемых параметров АСУТП по отношению к внешним и внутренним возмущениям, считая модель системы автоматизации линеаризованной. В общем виде систему линейных уравнений, описывающих функционирование технологического объекта удобно (см. §3.2) представлять в матричном виде: AY=BoX+DоF, (4.1) где: X – совокупность задающих воздействий Y – совокупность управляемых параметров ТО F – матрица-столбец внешних возмущений A, Bo и Dо – матрицы исходных коэффициентов, полученных при записи системы уравнений ТО. При записи системы уравнений (4.1) мы полагали, что каждый параметр yi управляется посредствам собственного задающего сигнала xi, но одновременно испытывает возмущающие воздействия как от некоторых “соседних” задающих воздействий, так и от “соседних” управляемых координат и некоторых внешних возмущений. Следовательно, в рассматриваемом случае количество управляемых координат равно количеству задающих воздействий и исходные матрицы А и В0 являются квадратными матрицами ранга n , где n – количество управляемых координат (параметров). Что касается количества m внешних возмущений fi, то оно не зависит от количества управляемых параметров и определяется лишь свойствами ТО. По этой причине исходная матрица Dо имеет размер n × m. Для решения матричного уравнения(4.1) относительно управляемых параметров Y домножим обе части его на обратную матрицу A-1 и после некоторых преобразований получим: Y=BX+DF (4.2), где B=A-1Bo , a D=A-1Do – матрицы того же размера, что и исходные матрицы Во и Do. Полная инвариантность параметров Y, описываемых уравнением (4.2), к любому возмущению из учтенных нами с помощью матриц B и D или, иными словами, абсолютная стабилизация всех параметров Y будет достигнута, если каждый параметр yi будет строго пропорционален управляющему им задающему воздействию xi. Следовательно, для реализации полной инвариантности параметров Y необходимо соблюдение двух условий: 1) матрица В должна быть диагональной; 2) матрица D должна быть нулевой, т.е. все ее элементы должны быть равны нулю. Матрица В есть совокупность коэффициентов, связывающих значения управляемых параметров, составляющих вектор Y, с задающими воздействиями, составляющими вектор Х. Ее диагональность означает, что не равны нулю только коэффициенты, связывающие управляемые параметры с собственными задающими воздействиями. Действительно, если выполняются условия инвариантности, то уравнение (4.2) разлагается на следующие простейшие равенства:
y1=b11x1, y2=b22x2, … yn=bnnyn , (4.2’)
свидетельствующие о независимости значений управляемых параметров как от сигналов, управляющих соседними каналами, так и от внешних возмущений. В этих равенствах коэффициенты b11, b22, … bnn – это элементы матрицы В, расположенные по ее диагонали начиная с элемента b11, расположенного в начале первой строки и первого столбца, и до элемента bnn, расположенного в конце последних строки и столбца матрицы В. В реальных ТО условия инвариантности обычно не соблюдаются. Достижение в необходимых случаях инвариантности по отношению к тем или иным видам возмущений является одной из основных задач проектирования АСУТП. Принцип достижения инвариантности состоит в том, что для компенсации возмущения, действующего в каком-либо канале, формируется дополнительный управляющий канал, по которому проходит компенсирующее воздействие, равное по величине и противоположное по знаку компенсируемому возмущению в точке его приложения. Рассмотрим с помощью рис. 4.1,
Рис.4.1 Схема реализации i-того канала управления с обратными связями по возмущению и по отклонению: xi – основное управляющее воздействие i-того канала; xj – основное управляющее воздействие j-того канала; X – совокупность остальных управляющих воздействий; bii – коэффициент передачи i-того канала по основному управляющему воздействию; bij - коэффициент паразитной перекрестной связи от j-того на i-тый канал управления; Bi – i-тая строка матрицы B кроме элементов bii и bij, см. соотношения (4.2) и (4.3); fk – k-тое внешнее возмущение, действующее на ТО; F – совокупность остальных внешних возмущений; dik – коэффициент передачи возмущения fk на i-тый канал управления; Di – i-тая строка матрицы D кроме элемента dik, см. соотношения (4.2) и (4.3); kj – коэффициент компенсирующей перекрестной связи от j-того на i-тый канал управления; kfk – коэффициент компенсирующей обратной связи по внешнему возмущению fk; ki – коэффициент отрицательной обратной связи по регулируемому параметру yi.
каким образом можно организовать компенсацию возмущений, действующих в i-том канале АСУТП, обеспечивающей управление ТО, модель которого представлена матричным уравнением (4.2). В соответствии с (4.2) уравнение i-того канала управления может быть представлено в виде
Любой из коэффициентов bij (j ≠ i, bij ≠ 0) уравнения (4.3) отображает влияние других каналов управления на i-тыйканал, а коэффициенты dik≠ 0 (k=1, 2…m) отображают влияние на этот канал внешних возмущений. Допустим, что на i-тыйканал управления наибольшее нежелательное влияние оказывают управляющее воздействие xj (через j-тый канал управления) и внешнее возмущение fk (см. рис. 4.1). Действие возмущений на i-тыйканал показано на рис. 4.1 сплошными линиями, так же как и действие основного управляющего воздействия хi через звено прямой связи bii. Компенсацию возмущения от j-тогоканала проведем посредством формирования компенсирующей перекрестной связи на i-тый канал через звено с коэффициентом передачи kj, а компенсирующее воздействие от возмущения fk подадим через дополнительный канал обратной связи с коэффициентом передачи kfk. Компенсирующие связи, также как канал обратной связи по отклонению с коэффициентом обратной связи ki, показаны на рис. 4.1 штриховыми линиями. После введения компенсирующих связей по xj и fk, показанных на рис 4.1, уравнение (4.3) преобразуется к виду:
Чтобы добиться инвариантности i-того канала к возмущениям xj и fk, необходимо обеспечить равенство возмущающих и компенсирующих сигналов, которое выражается, согласно (4.4), соотношениями:
где: kj – коэффициент передачи компенсирующей перекрестной связи от j-того на i-тый канал; kfk – коэффициент передачи компенсирующей обратной связи по k-тому внешнему возмущению, действующему в i-том канале связи. Поскольку не было наложено никаких ограничений на номер k внешнего возмущения и на номер j соседнего канала управления (кроме j ≠ i), то соотношения (4.4’) пригодны для организации компенсации любых возмущений, воздействующих, согласно уравнению (4.3), на i-тый канал управления. Равным образом, поскольку не были наложены ограничения на номер i рассматриваемого канала управления, то соотношения (4.3) и (4.4) пригодны для организации инвариантного управления любым каналом в рамках АСУТП, управляющей любым ТО, описываемым системой линейных уравнений (4.2). |
Последнее изменение этой страницы: 2017-03-14; Просмотров: 805; Нарушение авторского права страницы
 , отображенных в виде матрицы-столбца;
, отображенных в виде матрицы-столбца;  , задаваемых уставками
, задаваемых уставками  , воздействующих на ТО;
, воздействующих на ТО; 
 ; i=1, 2, …n. (4.3)
; i=1, 2, …n. (4.3) ; i=1, 2, …n; dik= di1, di2, ... dim. (4.4)
; i=1, 2, …n; dik= di1, di2, ... dim. (4.4) и
и  , (4.4’)
, (4.4’)